“煤矿智能运输技术与应用”专题征稿

2022, 48(6): 6-14, 35.
DOI: 10.13272/j.issn.1671-251x.17933
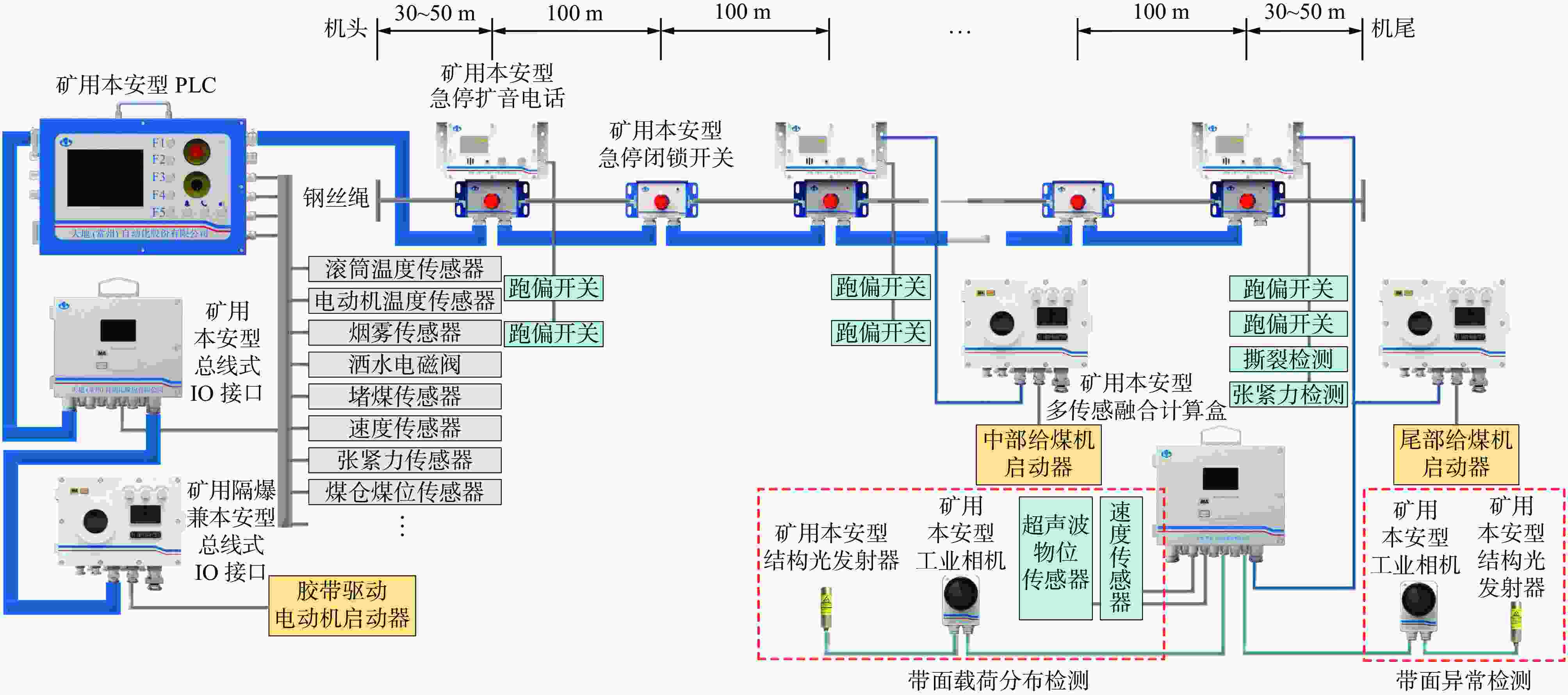
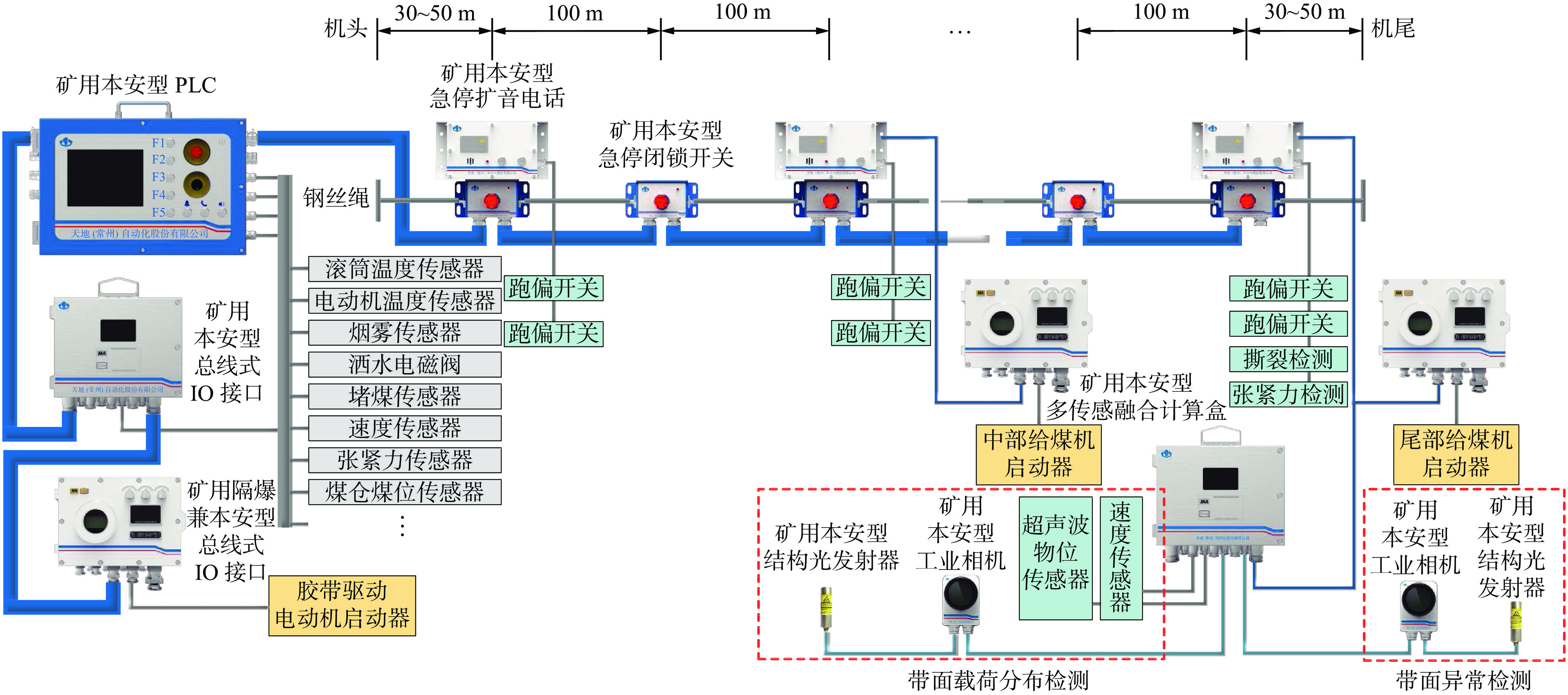
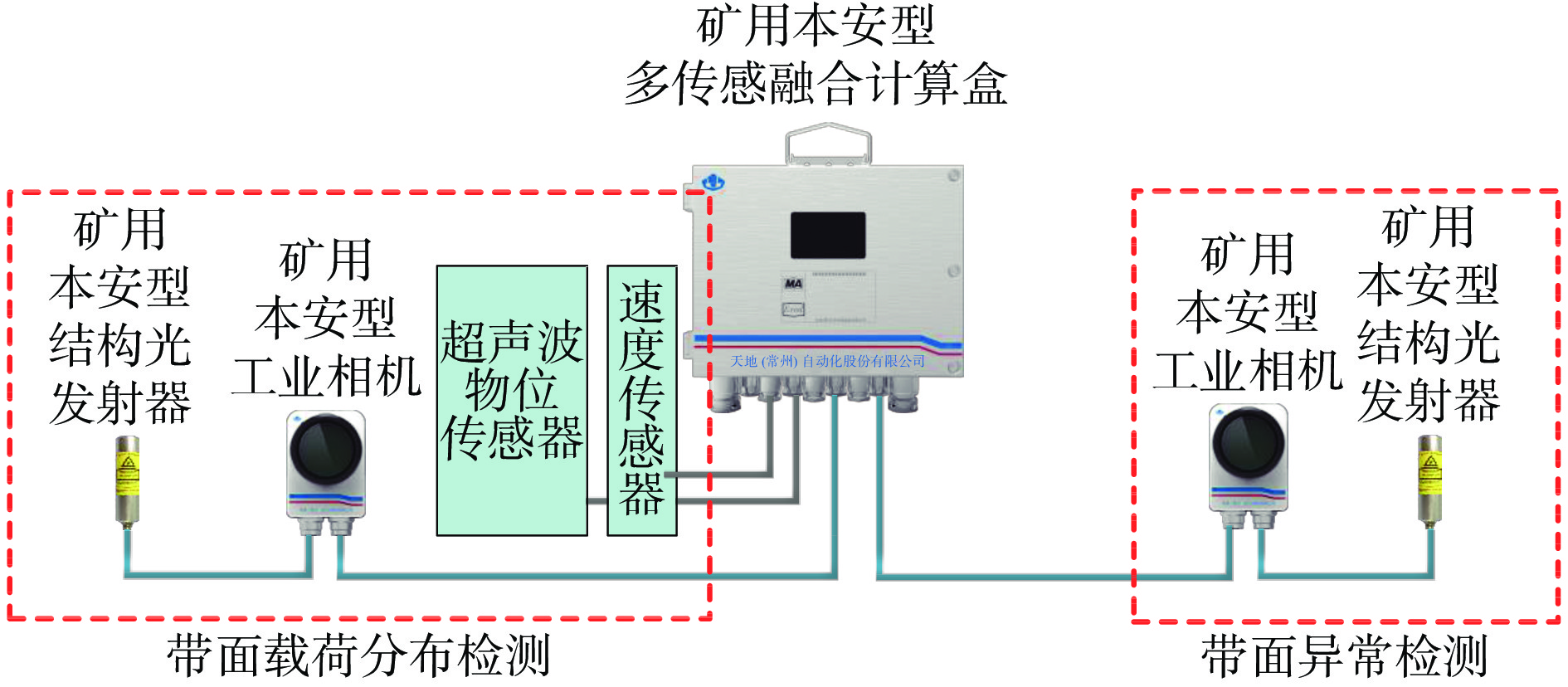
摘要: 井工煤矿运输系统按运输对象不同可分为主运输系统和辅助运输系统。阐述了我国井工煤矿主运输系统和辅助运输系统底层装备和系统智能化技术现状,从顶层规划和标准体系、单机智能化等方面分析了主运输系统和辅助运输系统智能化技术存在的问题。重点介绍了3种主运输系统智能化关键技术,包括基于...


2022, 48(6): 15-26.
DOI: 10.13272/j.issn.1671-251x.17921
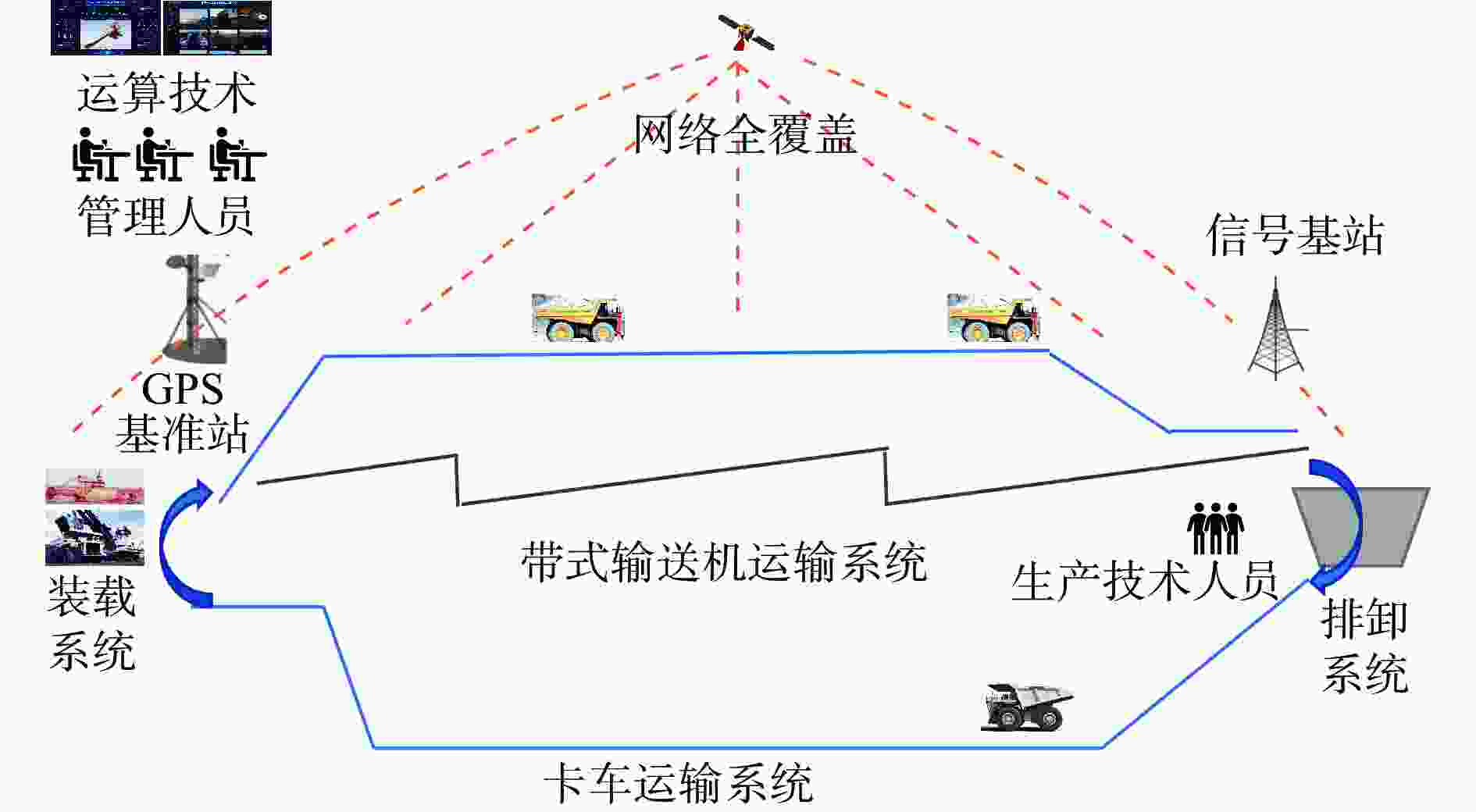
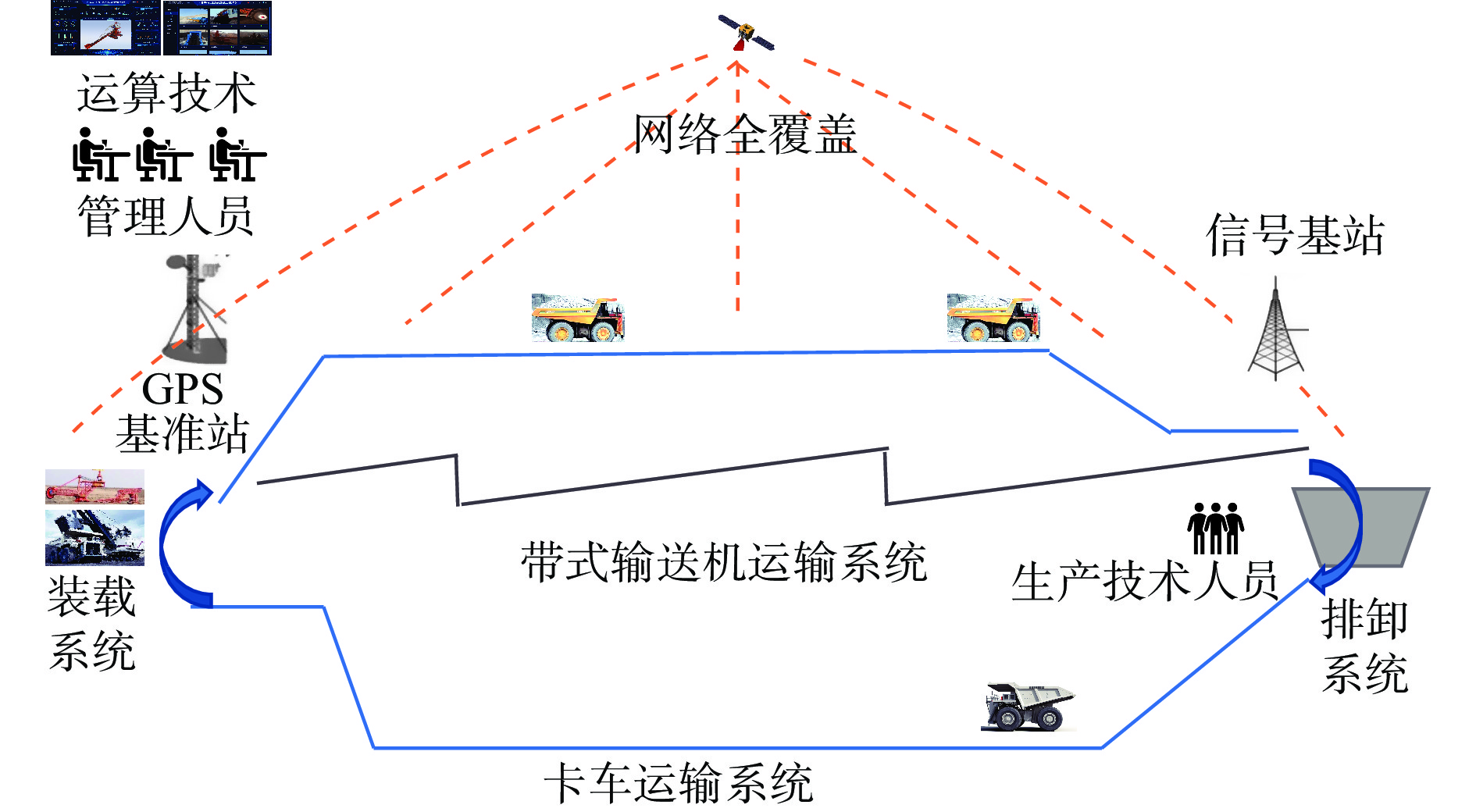
摘要: 运输环节作为露天矿生产工艺的最重要因素之一,其智能化是矿山整体智能化技术的重要研究内容。介绍了露天矿运输系统的构成及分类;明确了露天矿智能运输系统是以露天矿煤岩高效运输为应用场景,以智能化运输装备为核心载体,将物联网、云计算、大数据、人工智能、移动互联等数字技术与露天矿运...

2022, 48(6): 27-35.
DOI: 10.13272/j.issn.1671-251x.2022010052
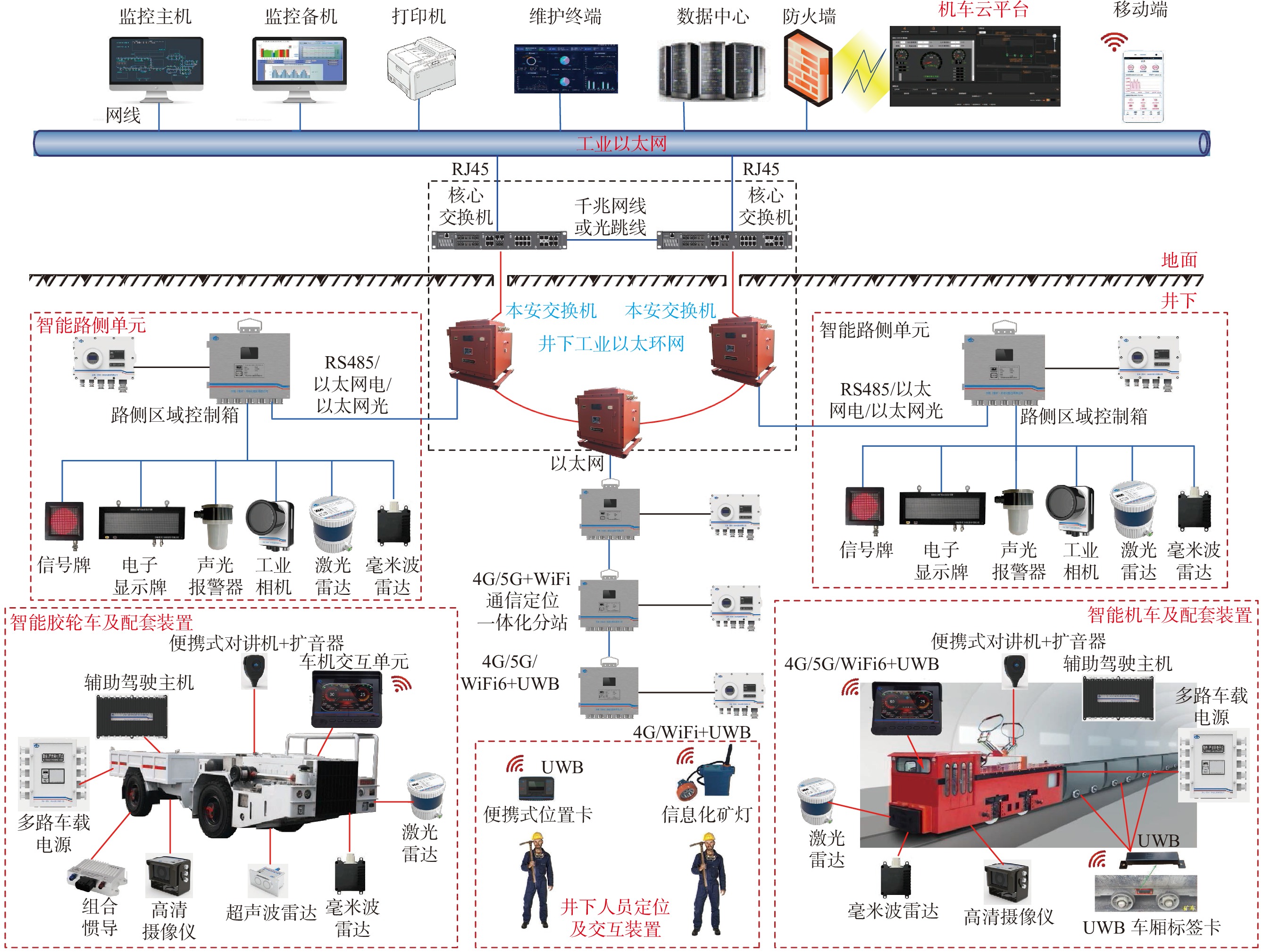
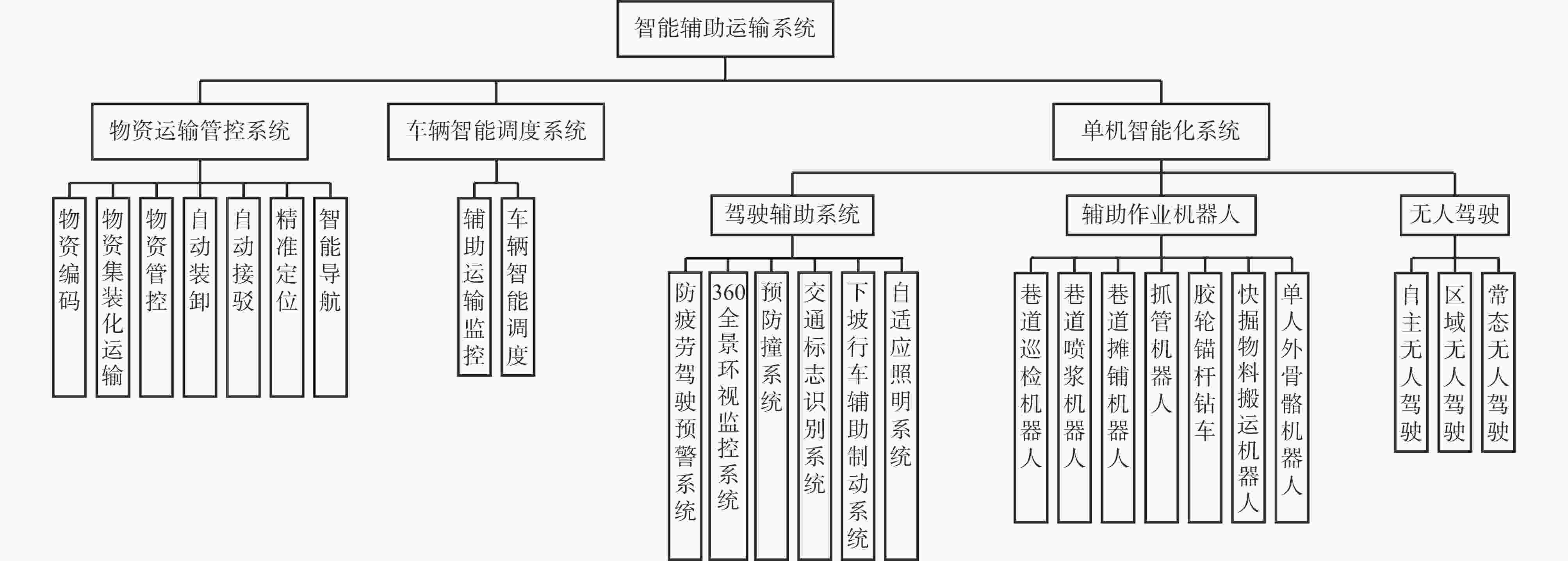
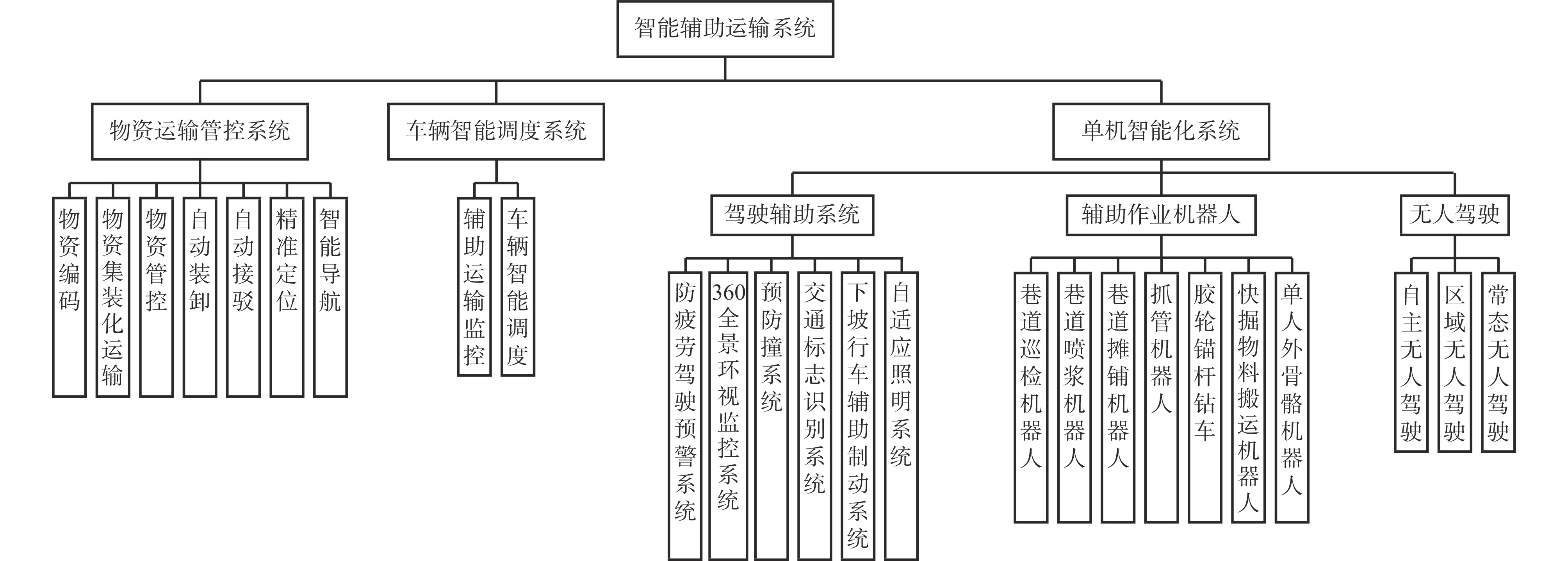
摘要: 介绍了国内外露天煤矿和井工煤矿辅助运输智能化技术发展和应用现状:露天煤矿的智能辅助运输系统已经实现了矿用卡车在固定路段内的无人驾驶、自动装载、自动卸载、主动避障、智能调度等功能,工程实践也取得了不错的应用效果;井工煤矿辅助运输智能化目前还处于装备的单机智能化发展阶段,尚未...
2022, 48(6): 36-48.
DOI: 10.13272/j.issn.1671-251x.17946
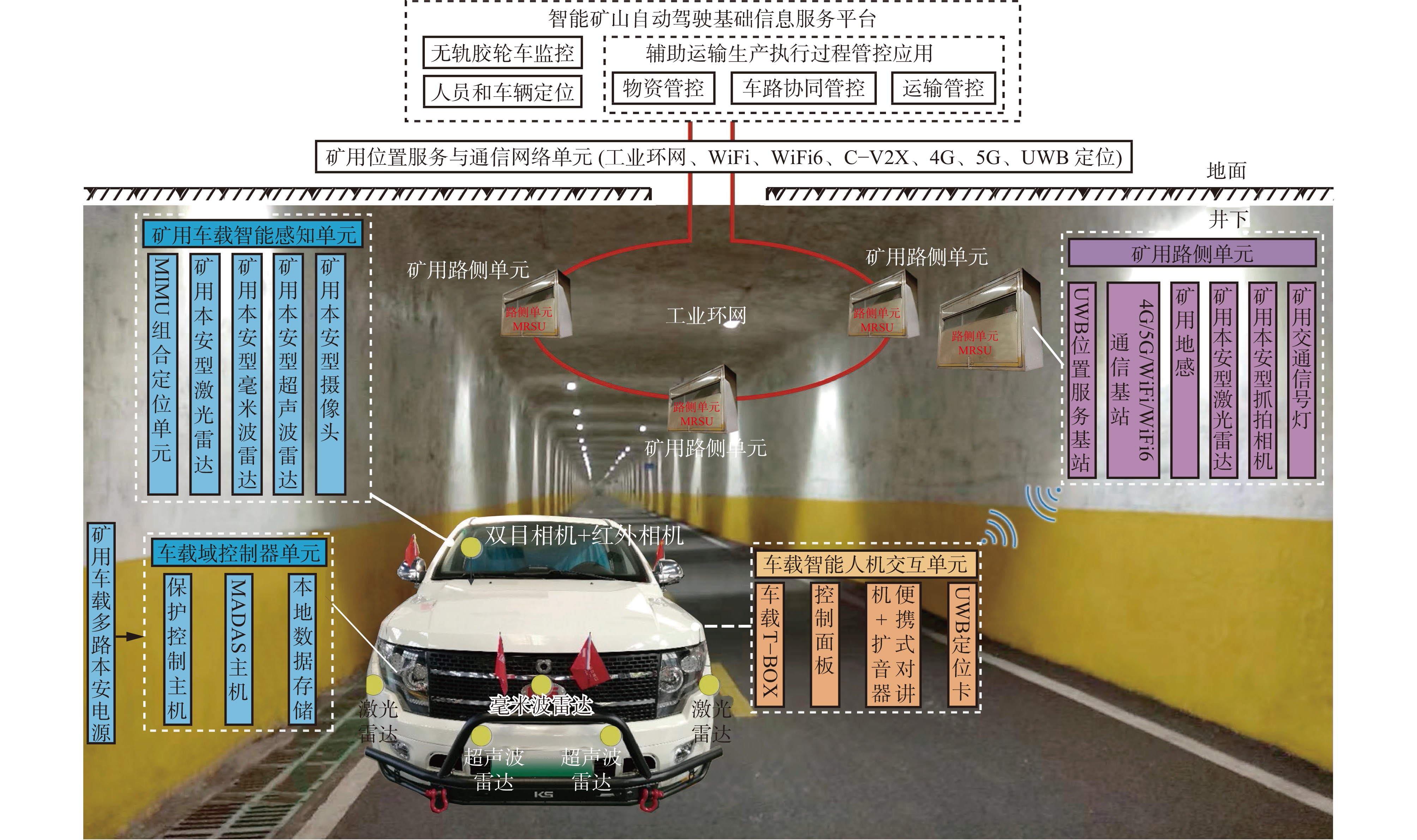
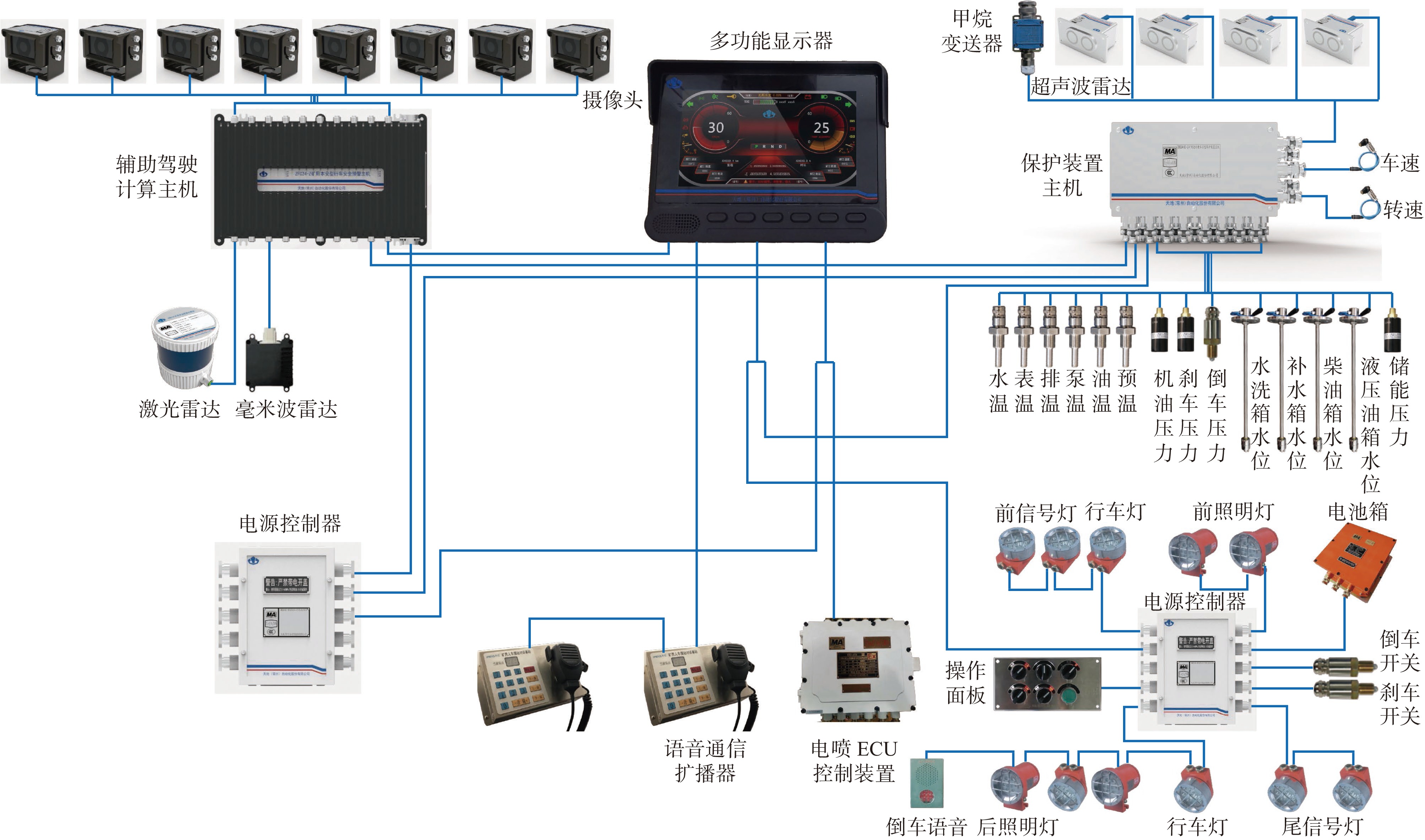
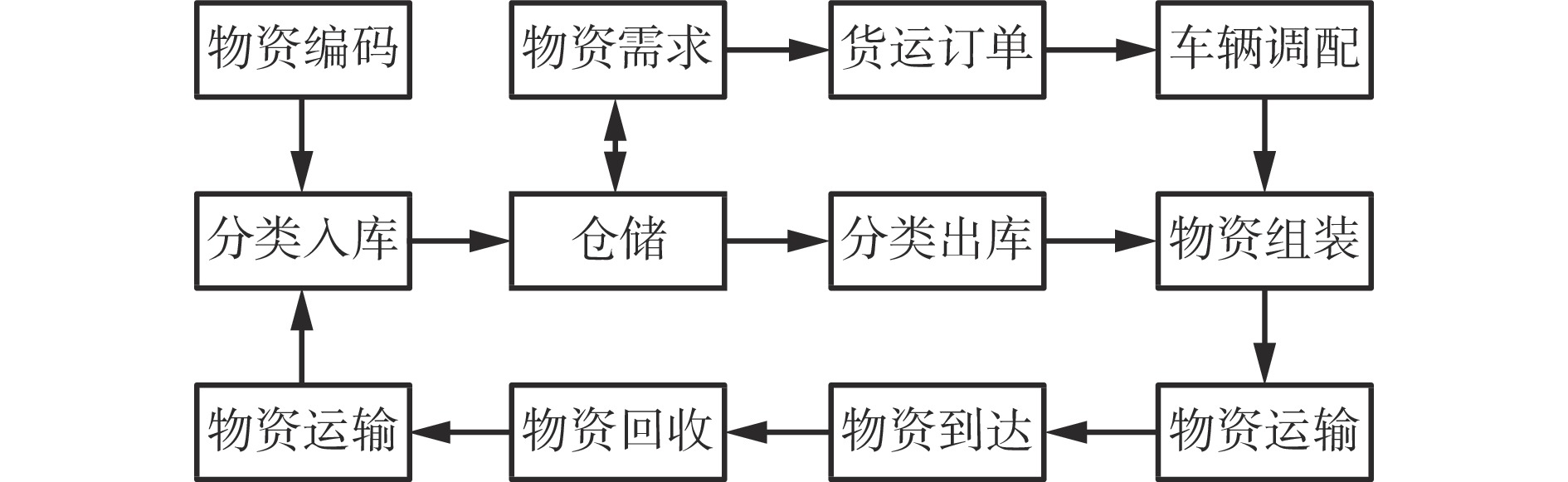
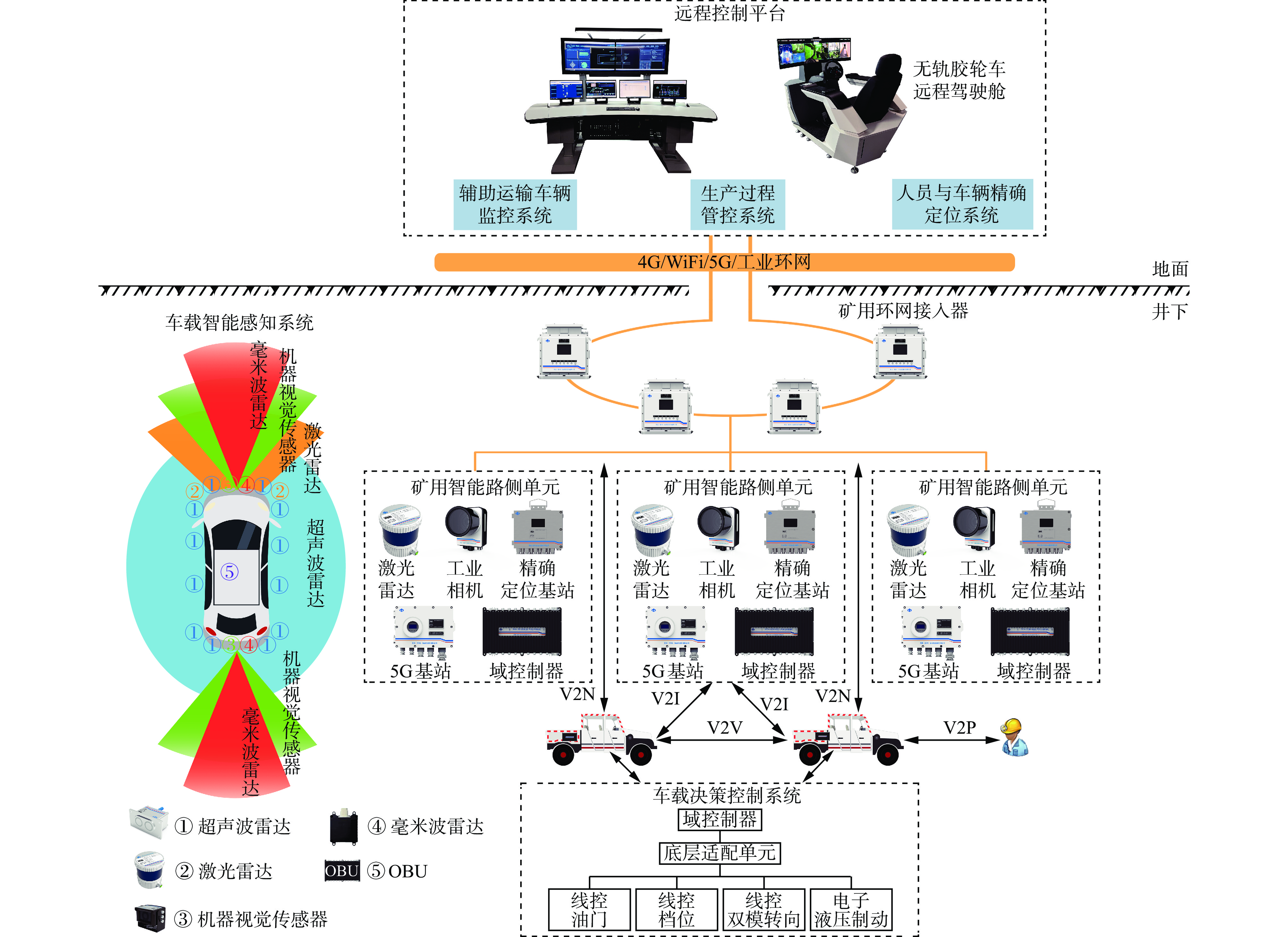
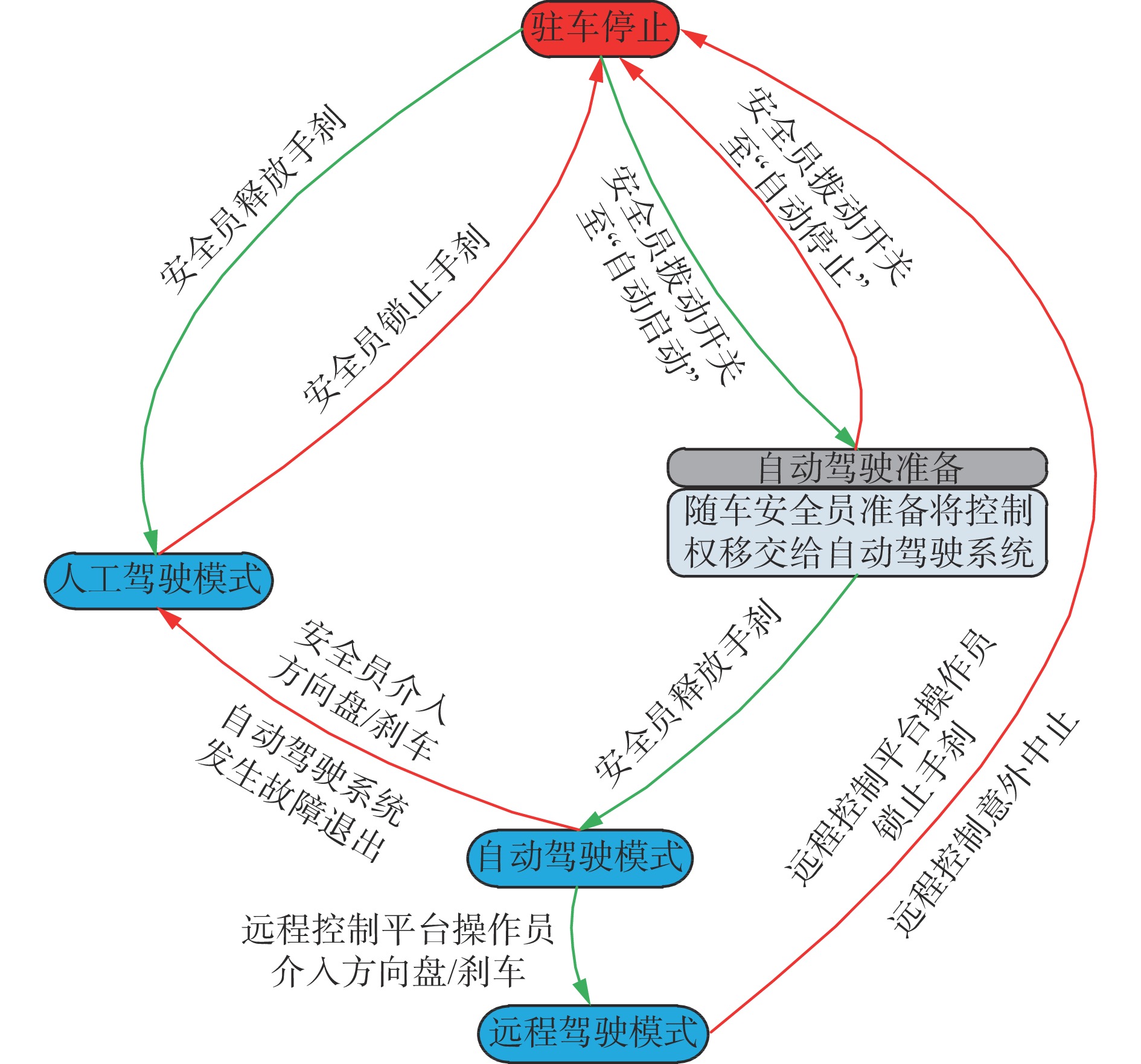
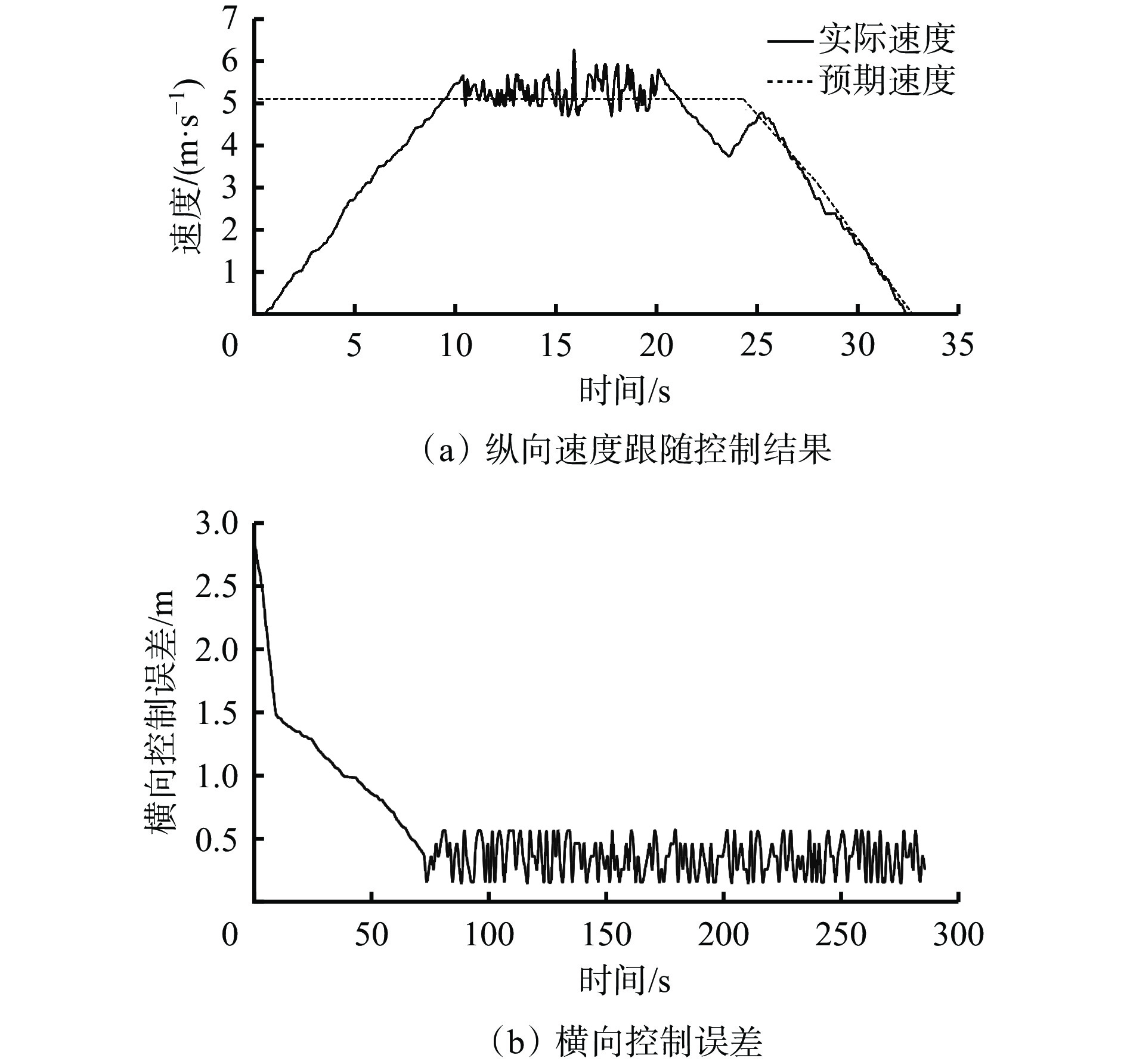
摘要: 煤矿井下无轨胶轮车无人驾驶可大幅减少井下辅助运输作业人员数量,降低人员劳动强度,是辅助运输智能化的主要发展方向之一。相较于地面汽车无人驾驶,煤矿井下无轨胶轮车无人驾驶存在一系列新的挑战:井下巷道“长廊效应”、“多径效应”干扰;狭窄场景内人车混行等复杂路况对车辆精准控制的高...
2022, 48(6): 49-55.
DOI: 10.13272/j.issn.1671-251x.17930
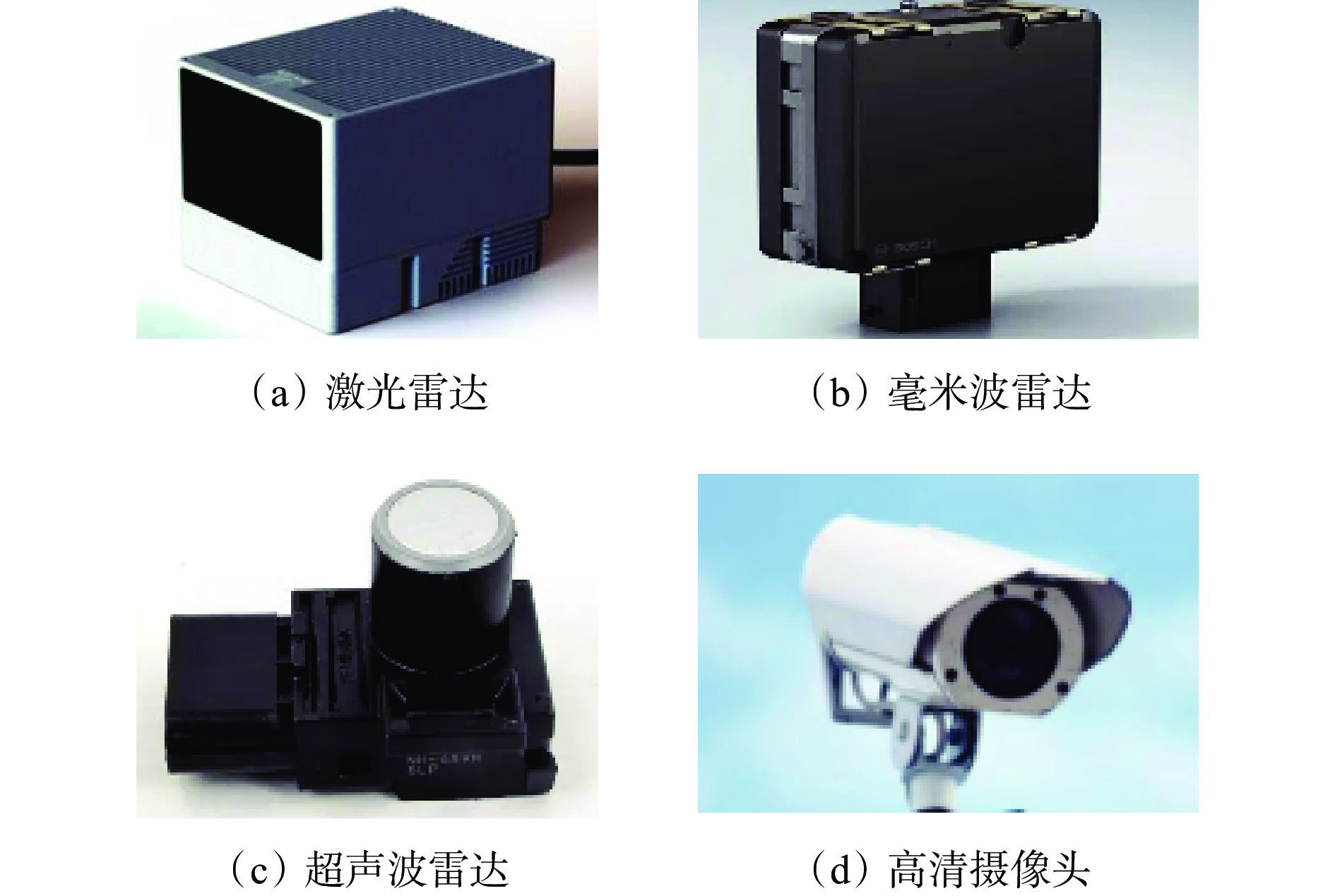
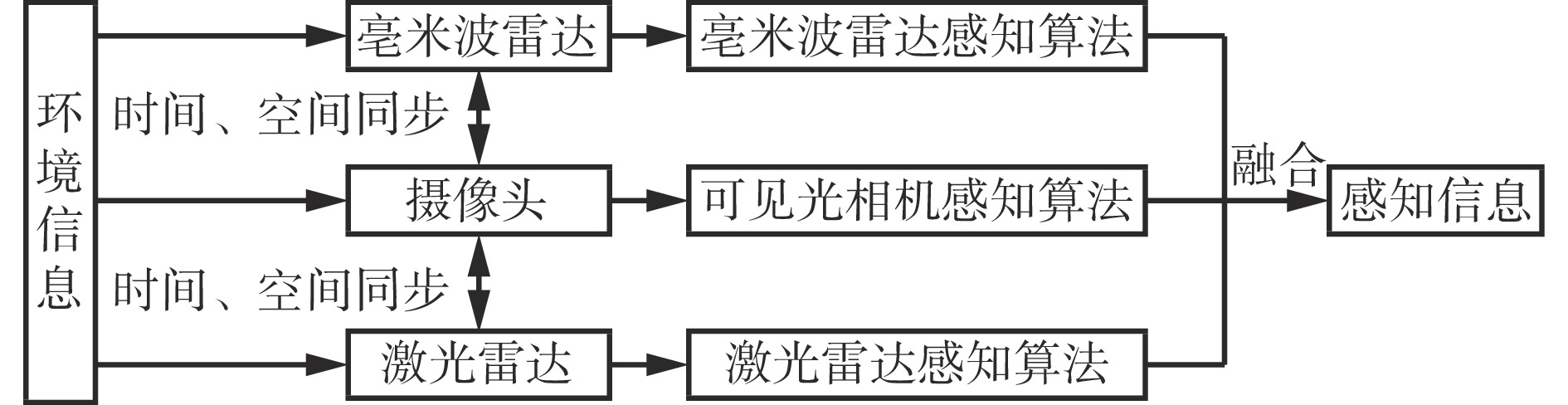
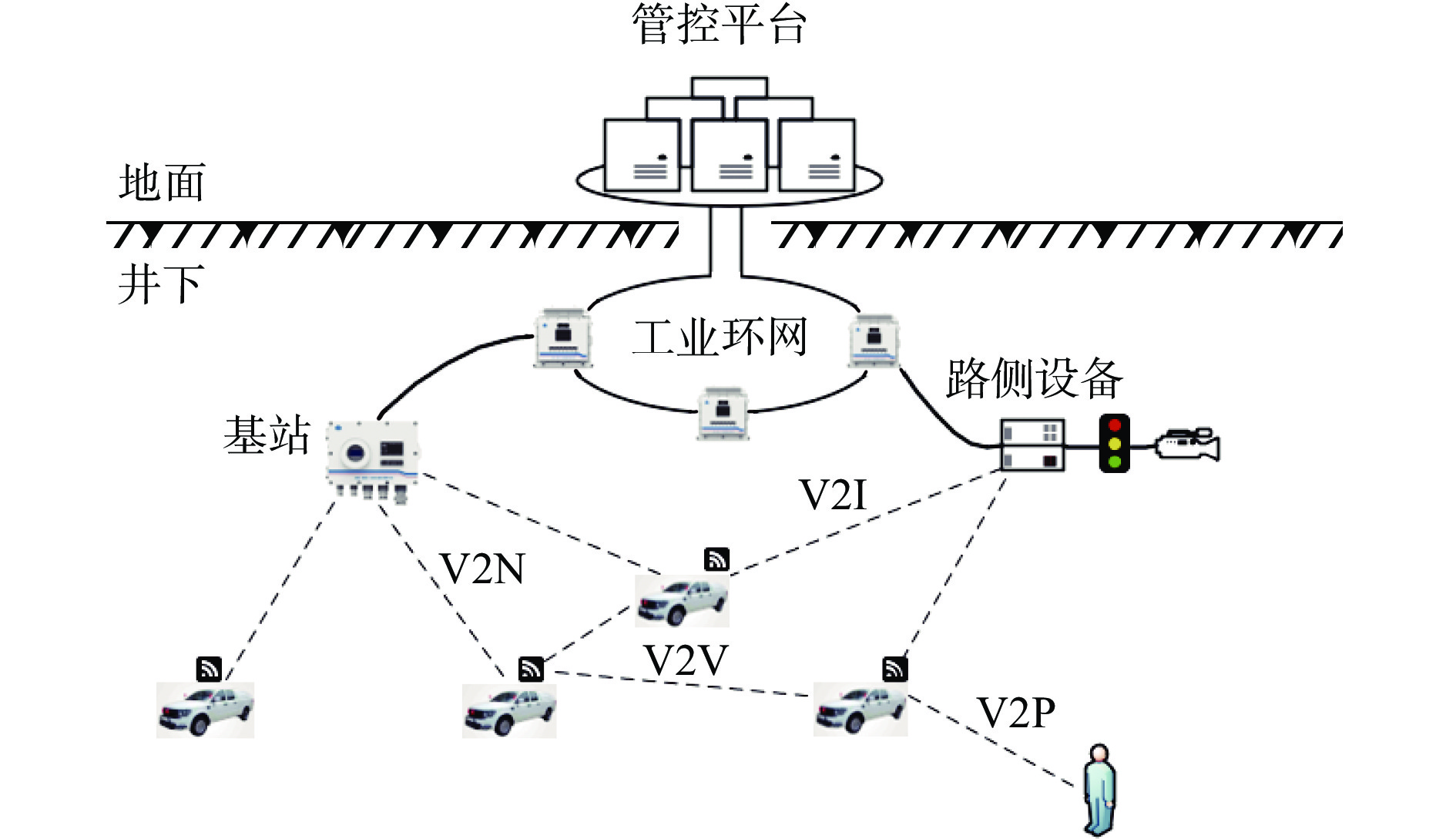
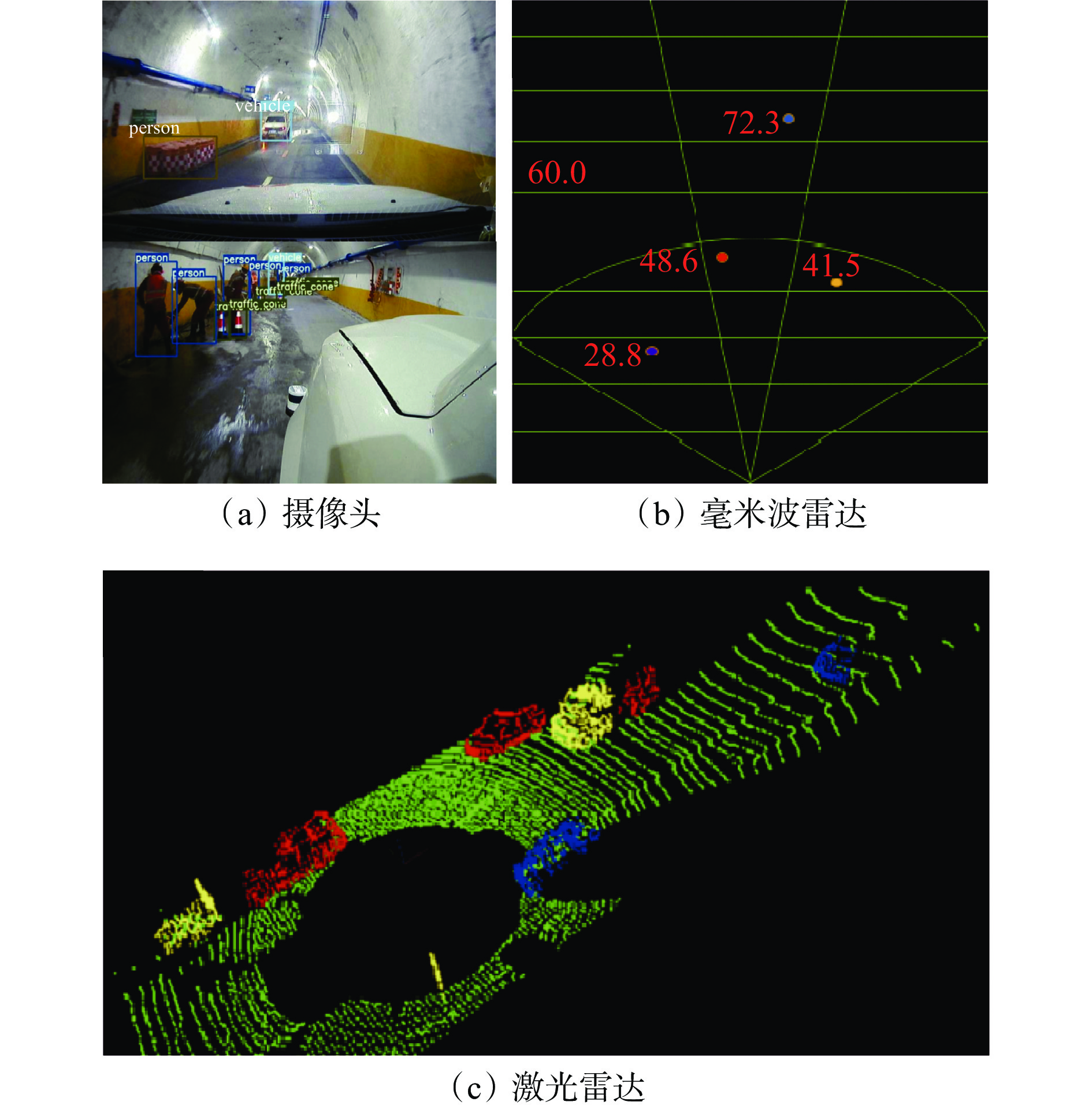
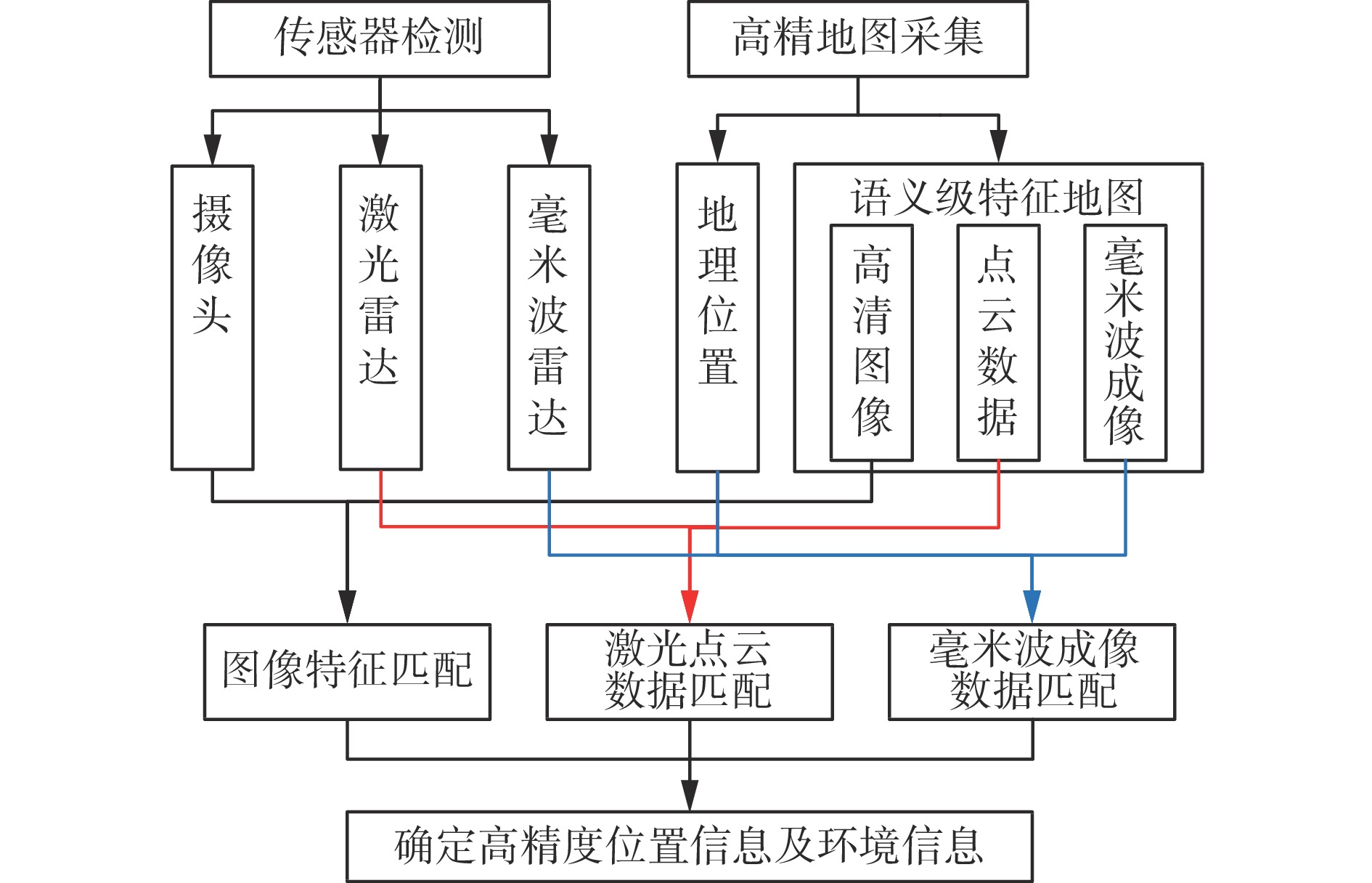
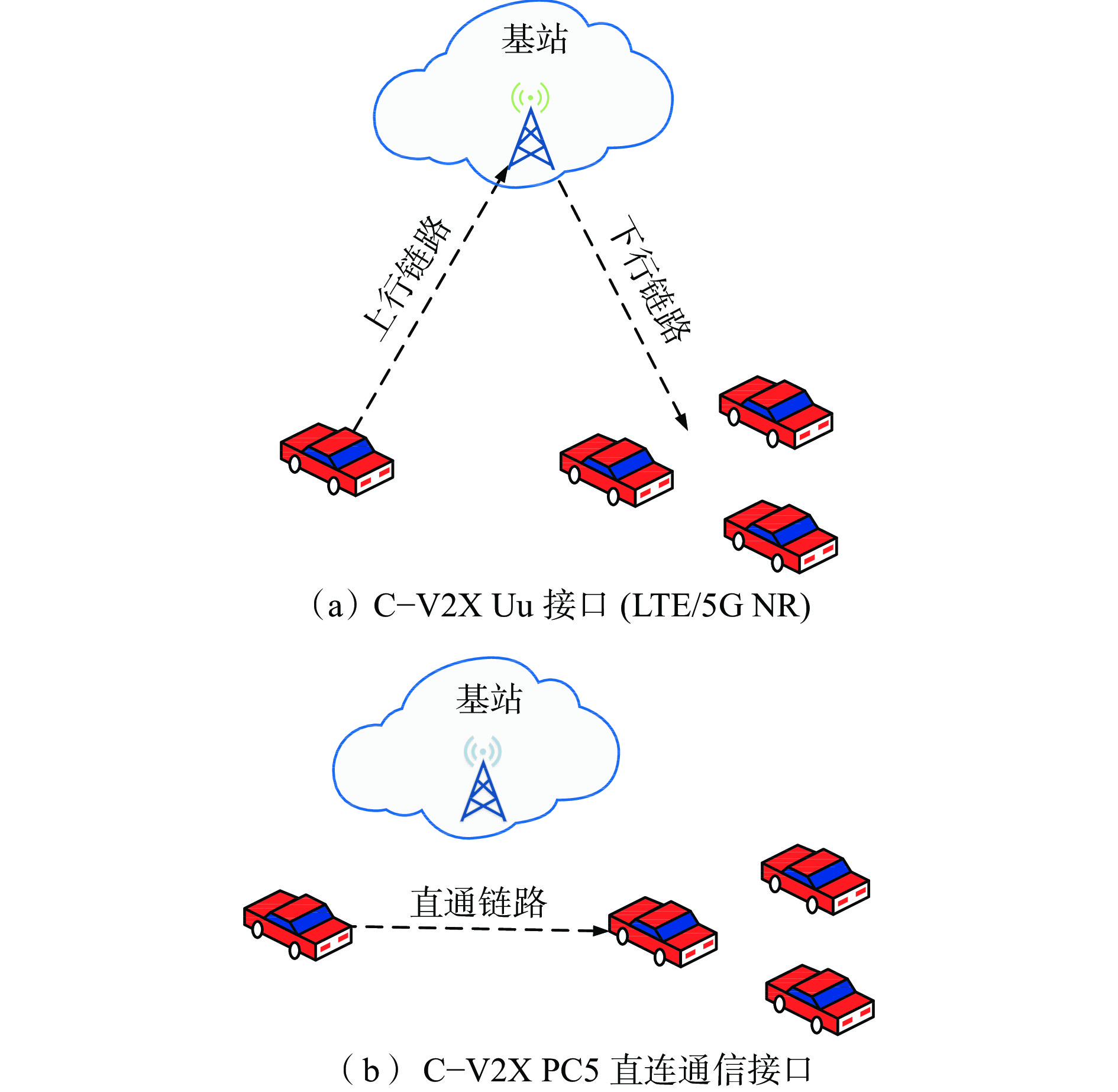
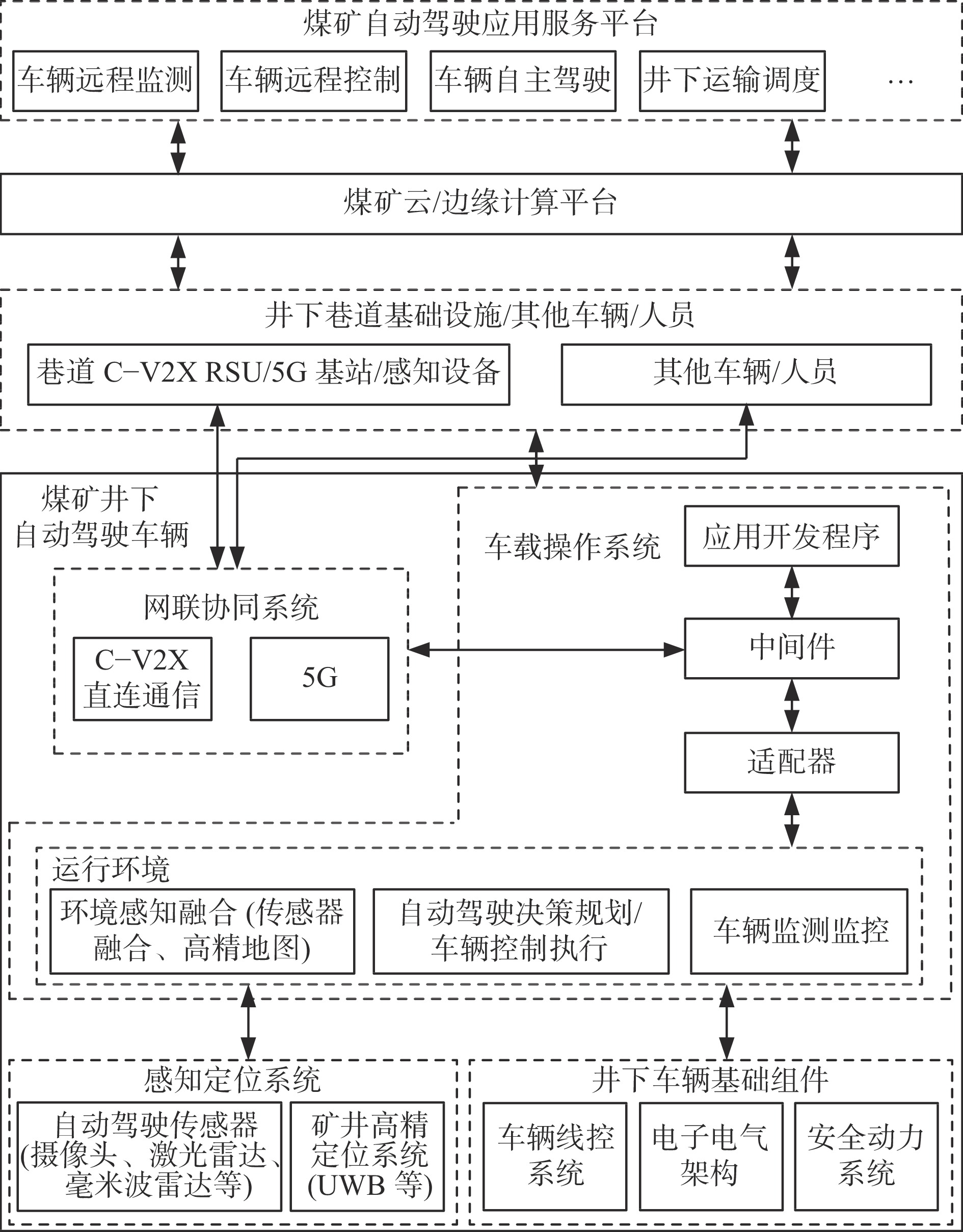
摘要: 通过分析地面常规自动驾驶智能化和网联化技术发展现状及技术特点,结合煤矿井下无GNSS(全球卫星导航系统)信号覆盖、巷道照度低、遮挡物与障碍物较多、煤尘粉尘普遍存在的环境特点,提出了煤矿井下开展自动驾驶研究的关键技术,即无GNSS的移动高精定位技术、激光雷达技术、基于毫米波...

2022, 48(6): 56-63.
DOI: 10.13272/j.issn.1671-251x.2022030001
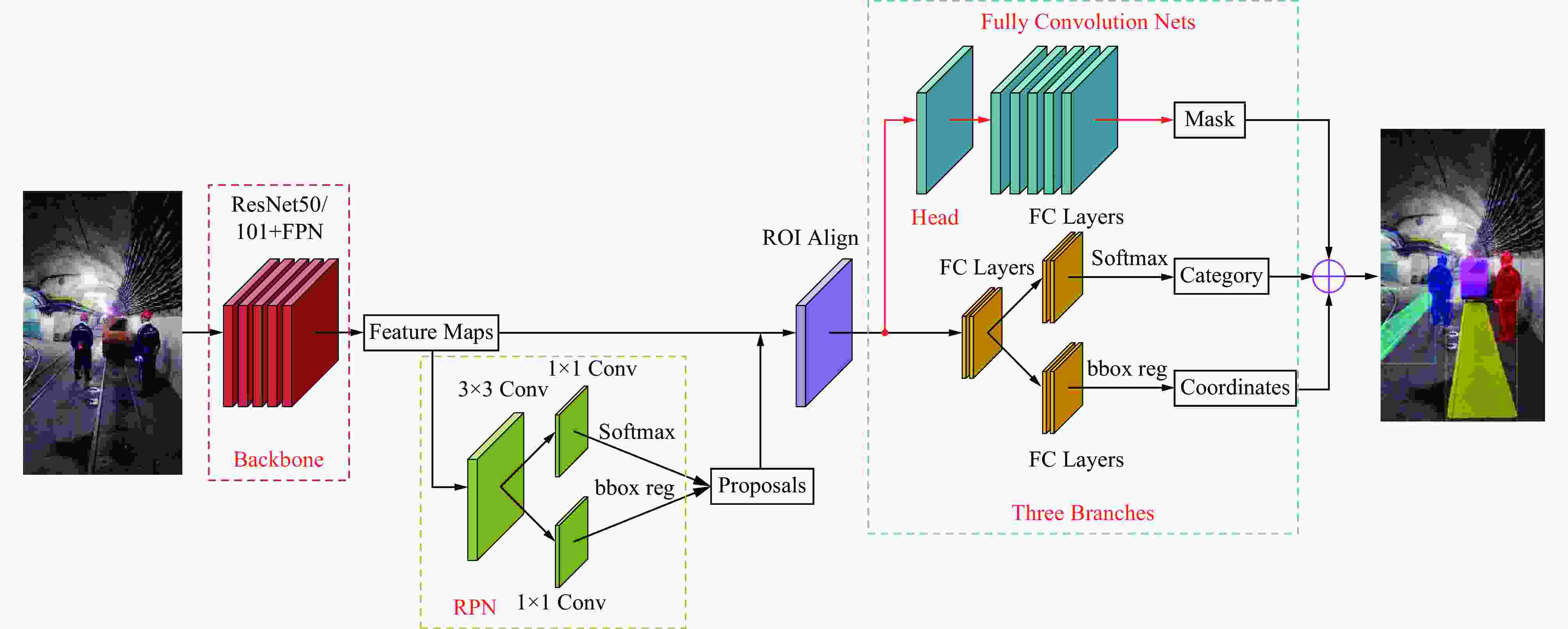
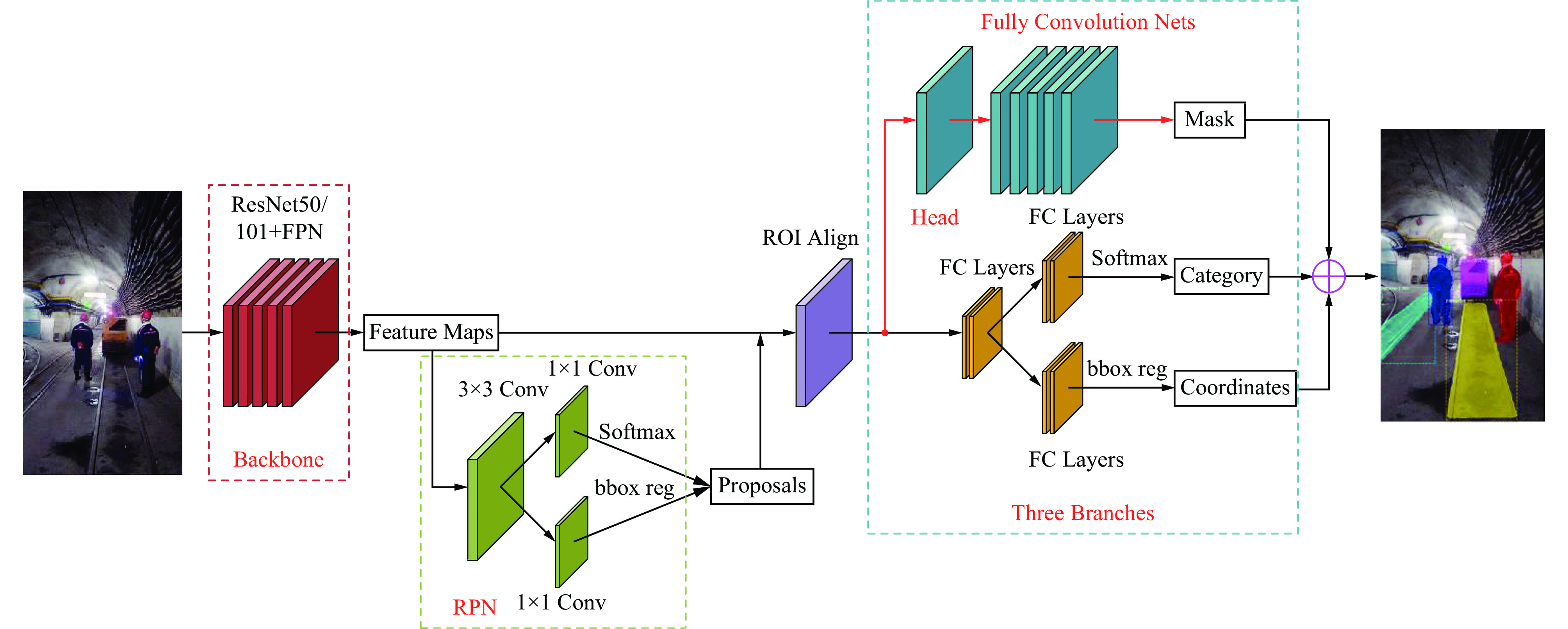
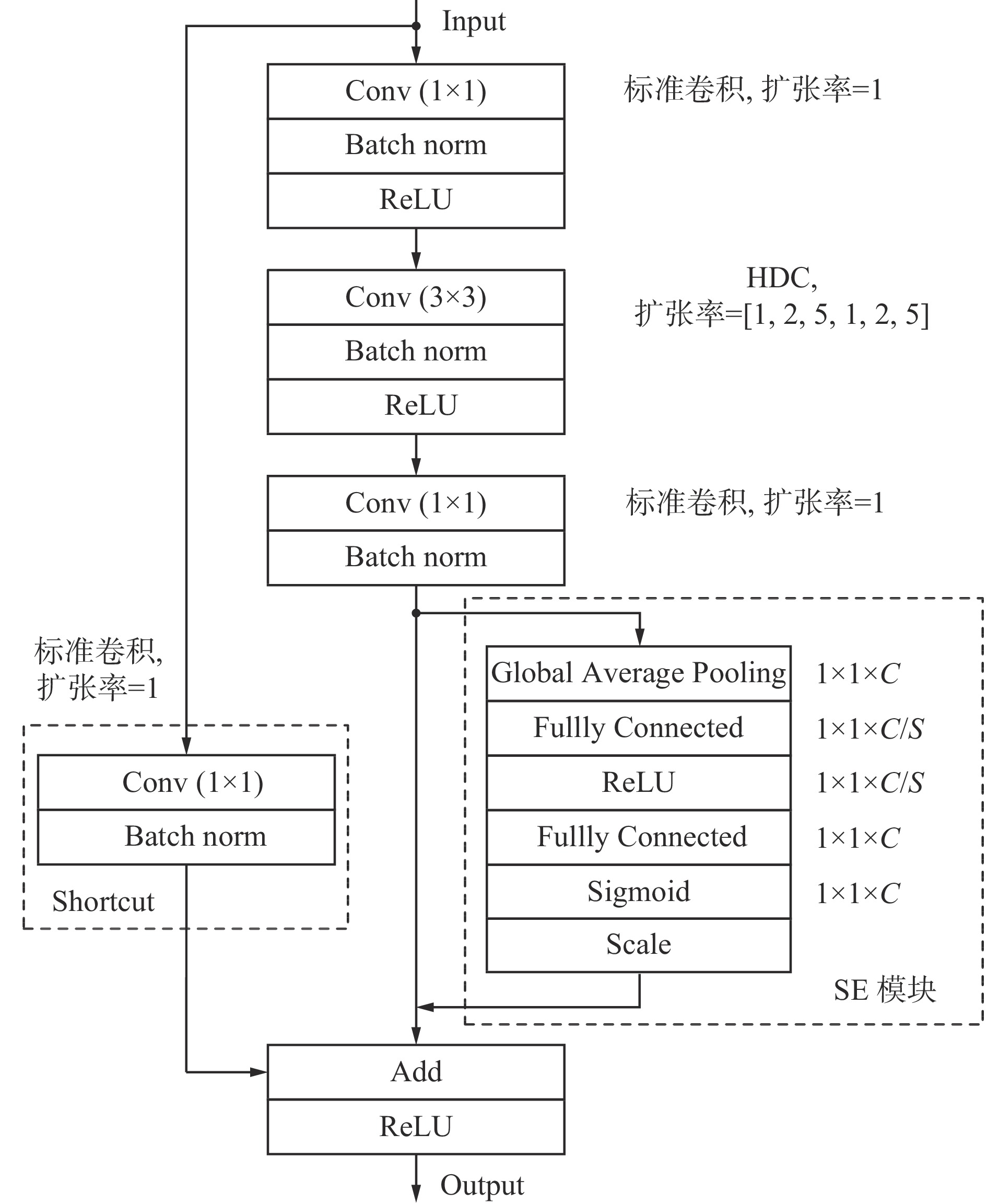
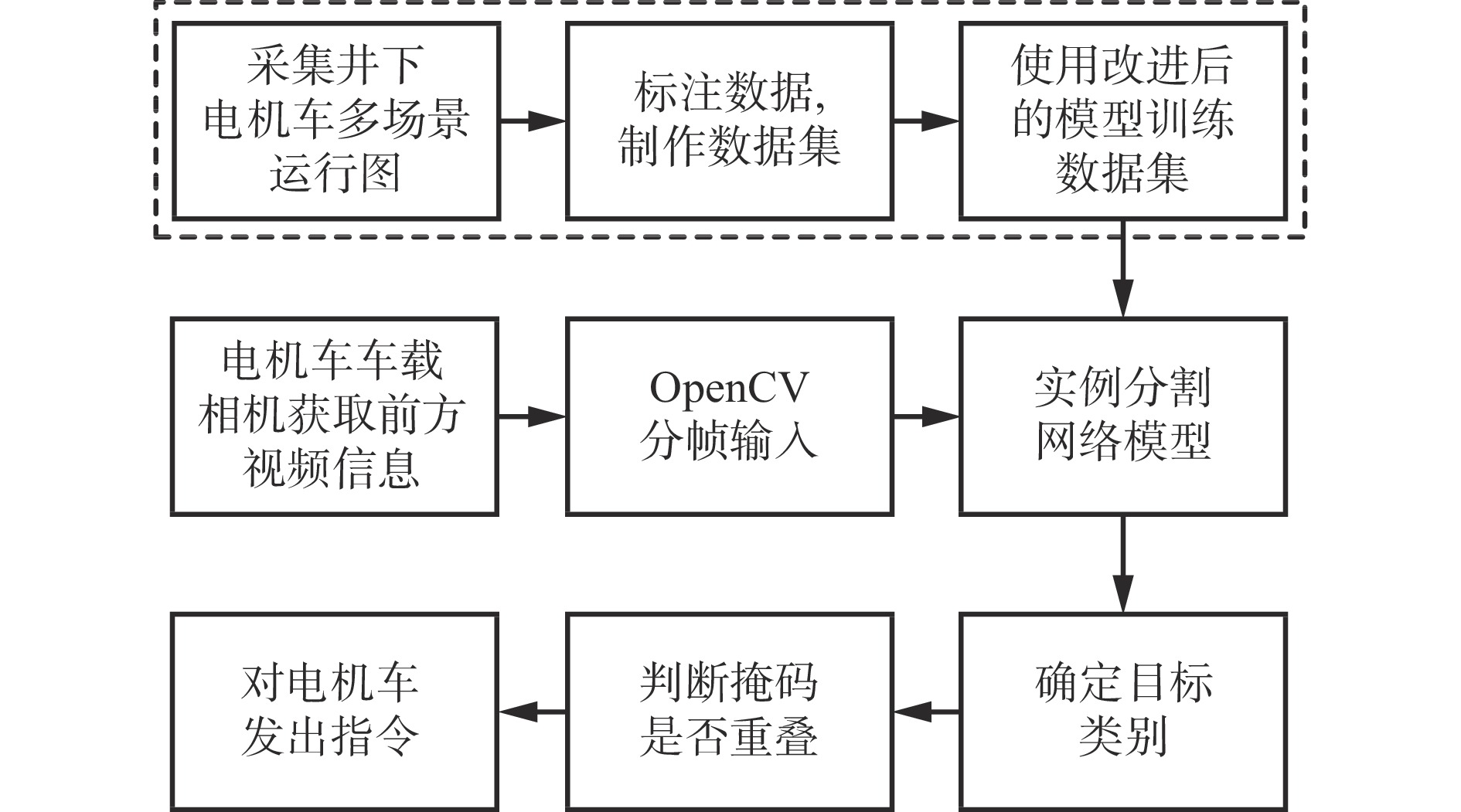
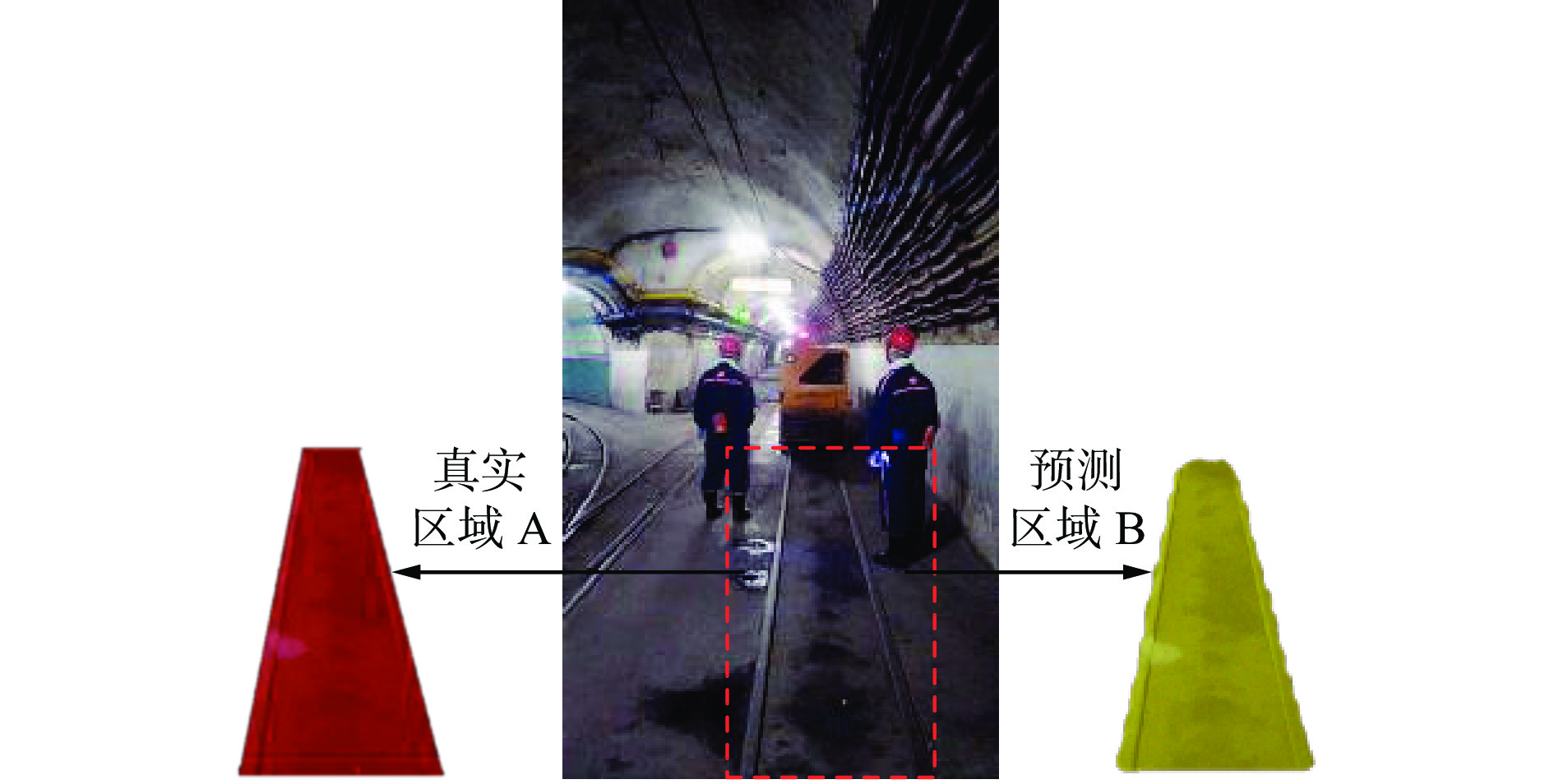
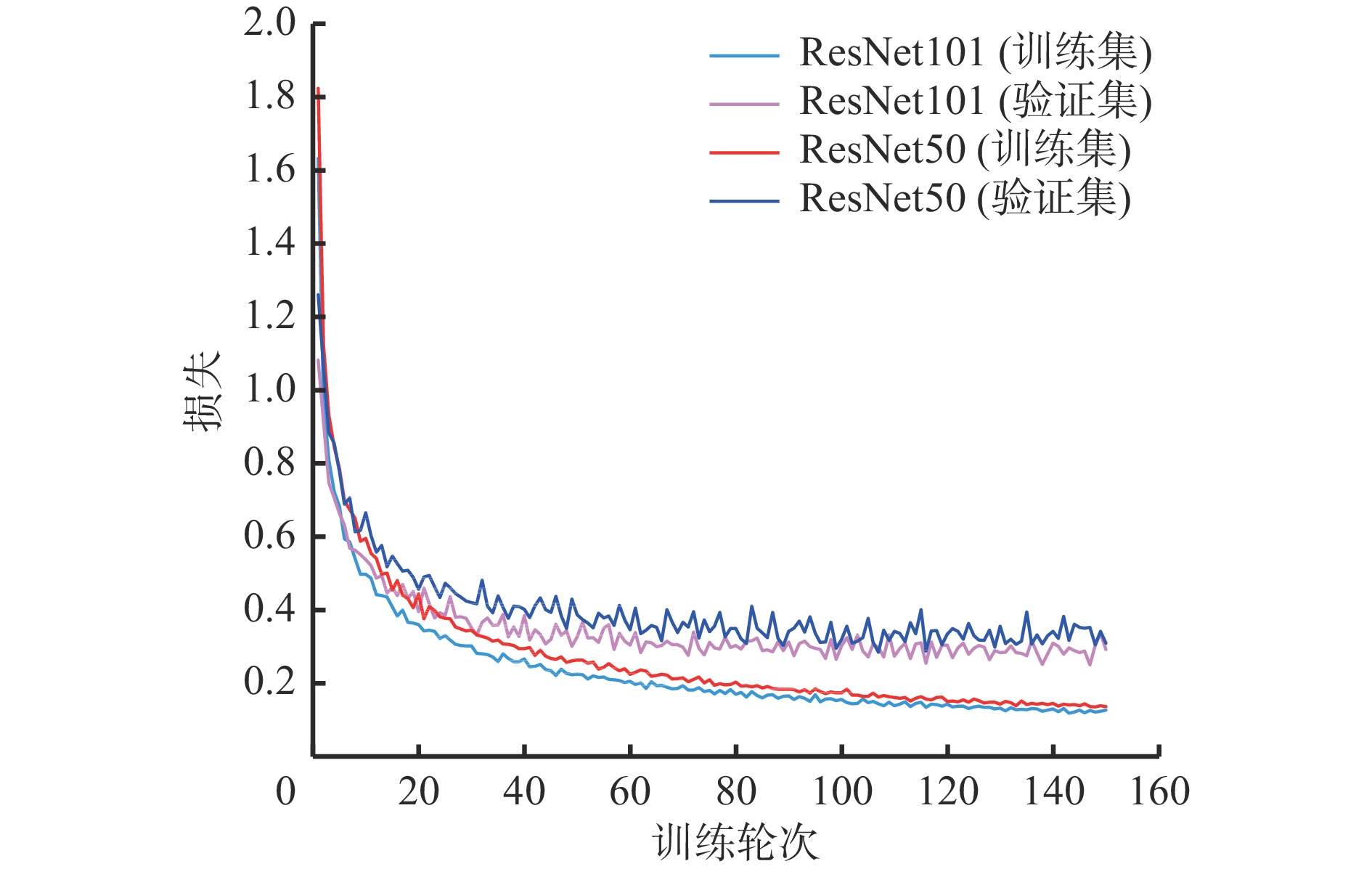
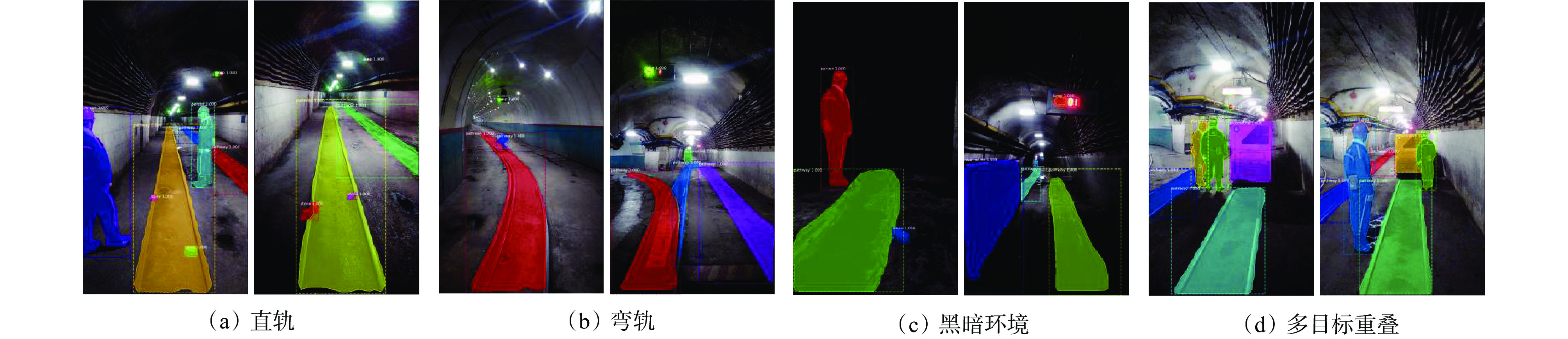
摘要: 目前煤矿井下无人驾驶有轨电机车在行驶过程中,对轨道中的石块及其他小型障碍物的识别存在检测速度慢、检测精度低,且对于重叠目标,易造成漏检、错检等问题。针对上述问题,提出了一种井下电机车多目标检测模型−SE−HDC−Mask R−CNN模型。该模型基于Mask R−CNN进行...


2022, 48(6): 64-68.
DOI: 10.13272/j.issn.1671-251x.17919
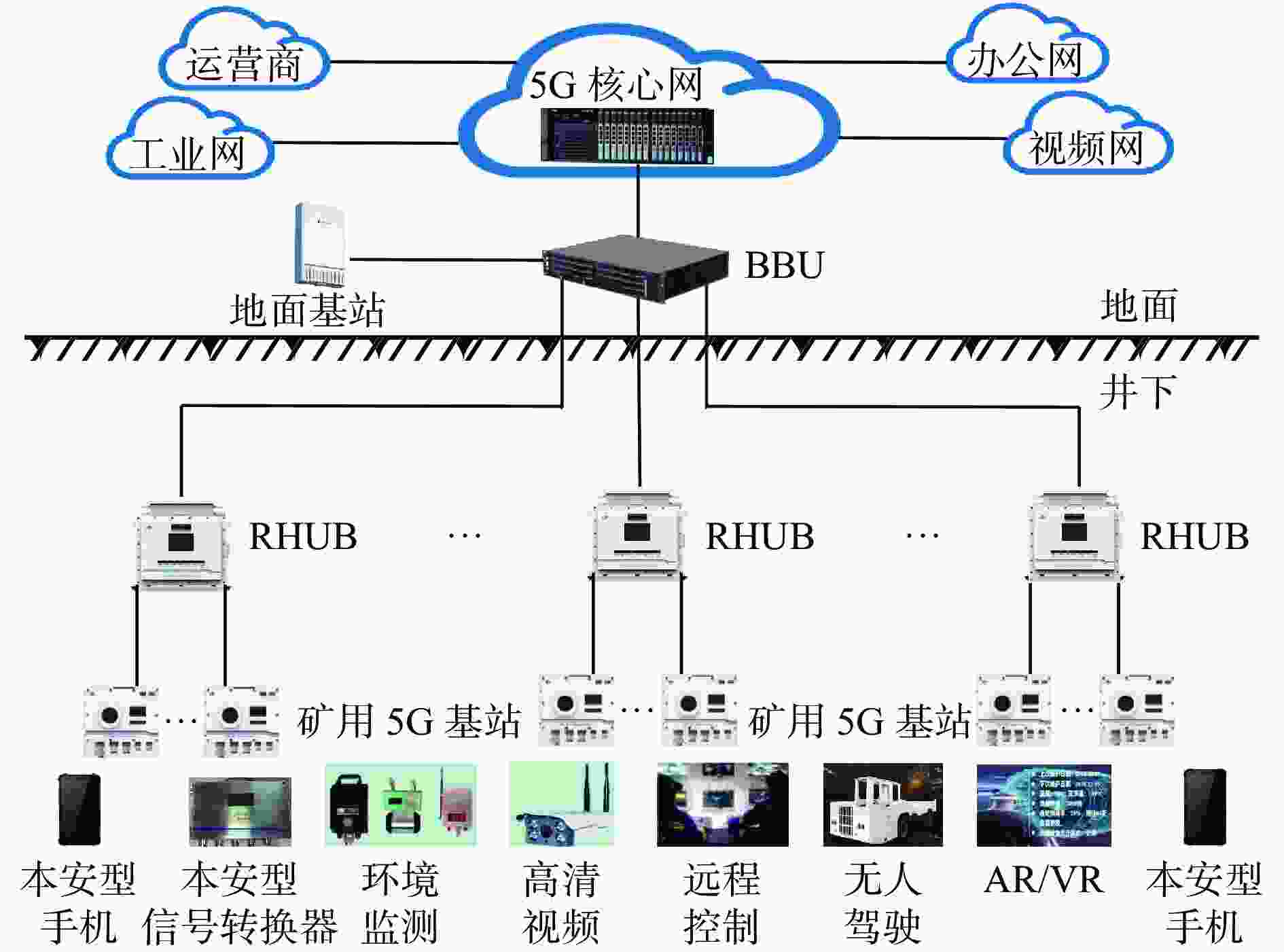
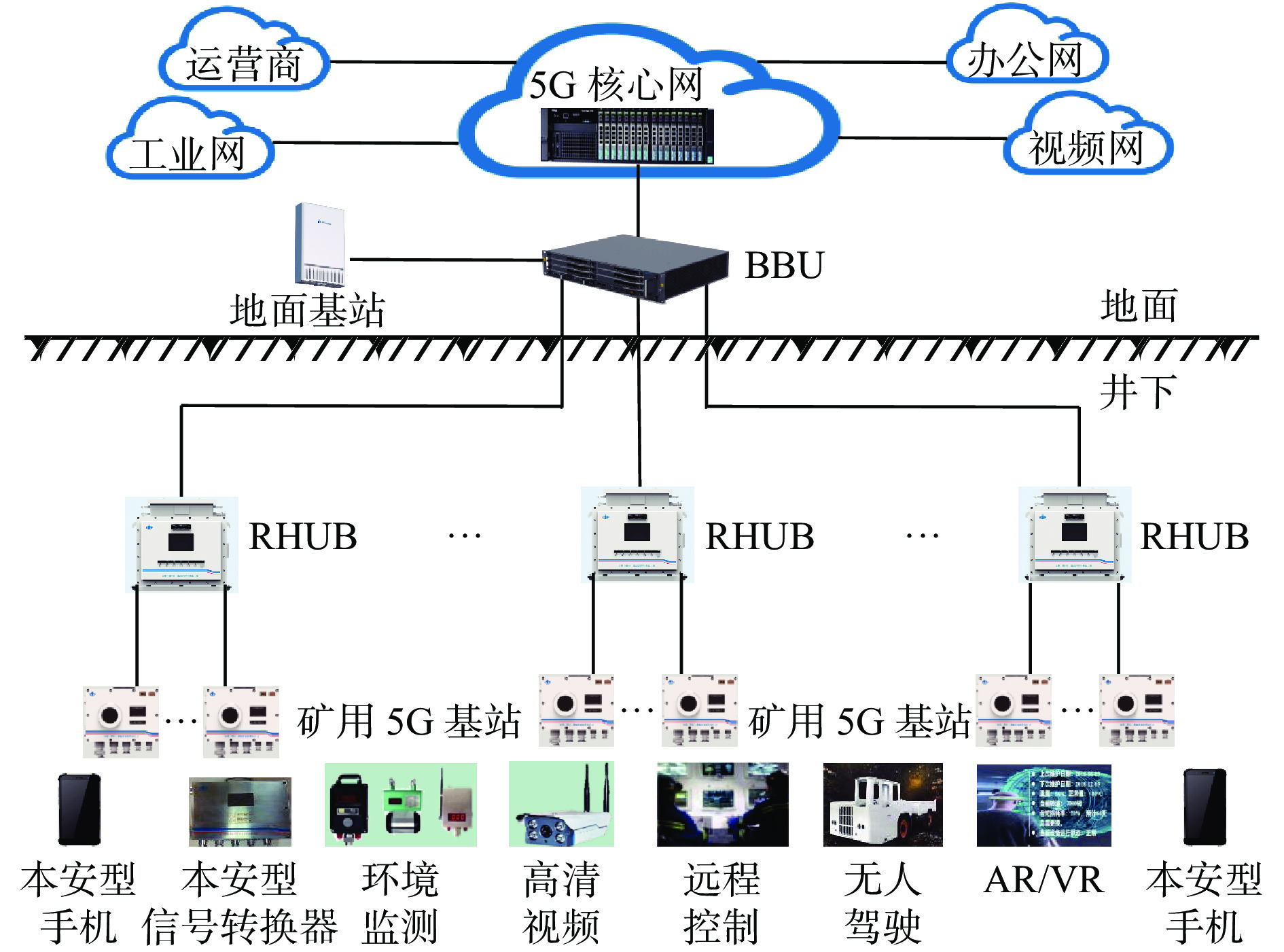
摘要: 针对掘进工作面运输系统通信网络存在的接入能力不足、传输可靠性低、传输带宽不足等问题,探讨了5G技术在煤矿掘进工作面运输系统中应用的必要性和可行性:经过优化设计的矿用5G系统性能指标达到预期,完全能够满足当前煤矿智能化建设对无线通信系统的需求;矿用5G通信模组、5G客户终端...

2022, 48(6): 69-76, 111.
DOI: 10.13272/j.issn.1671-251x.17931
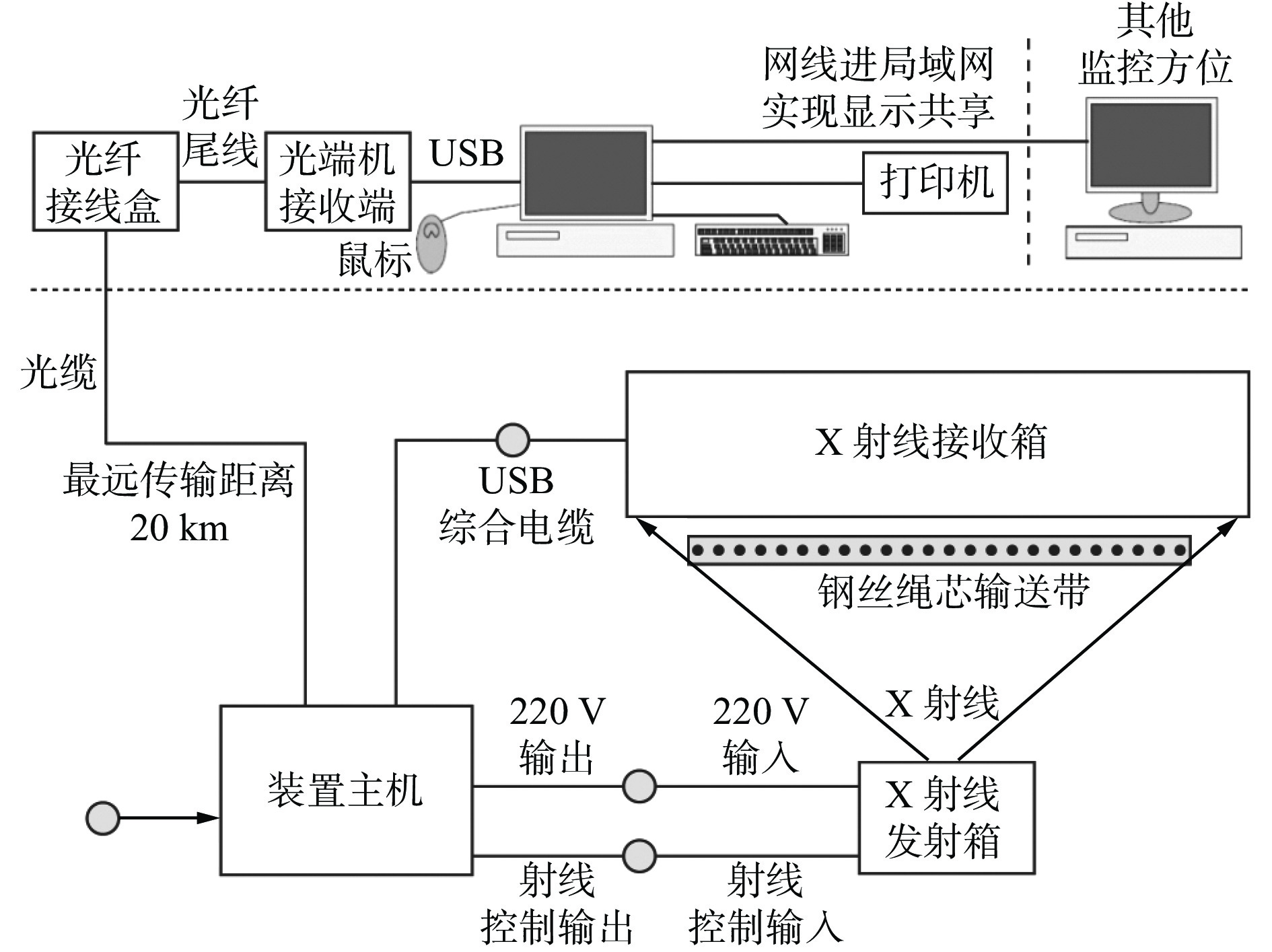
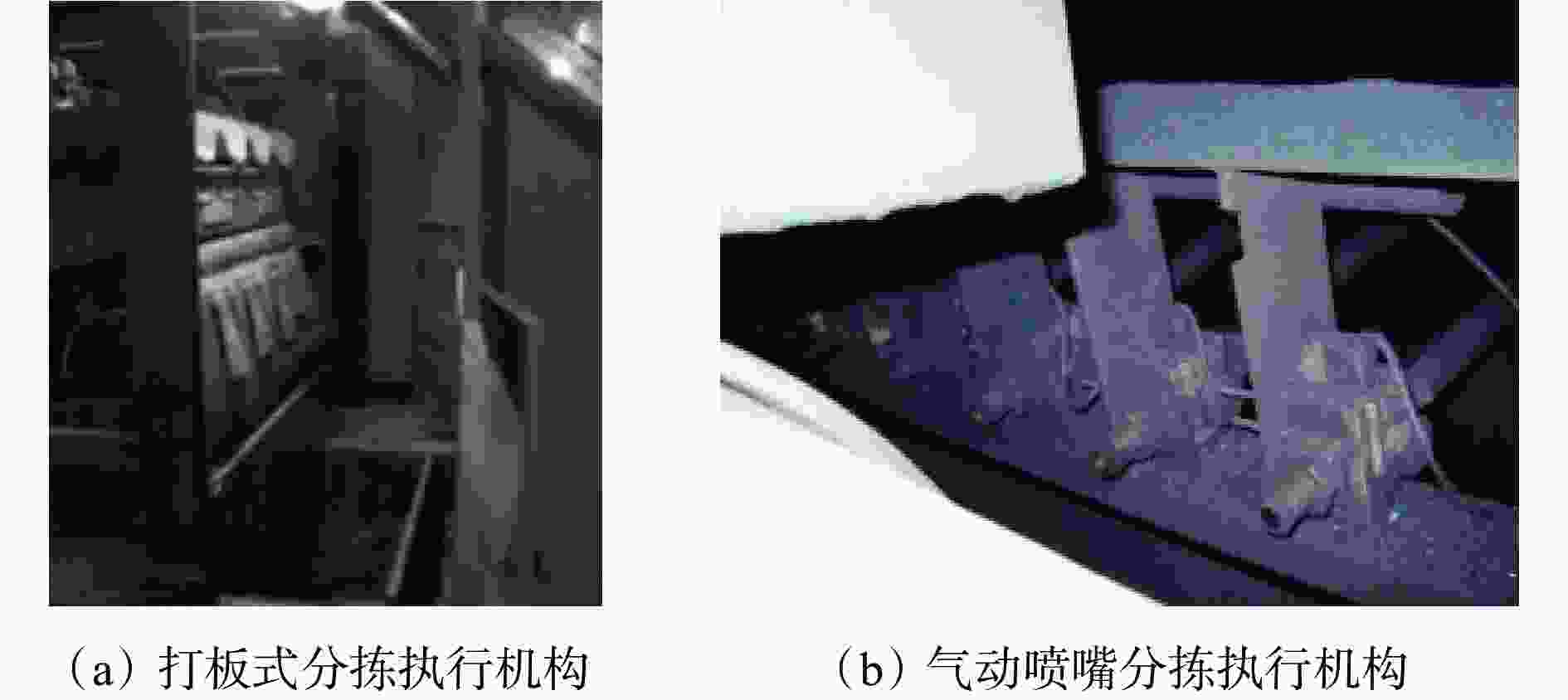
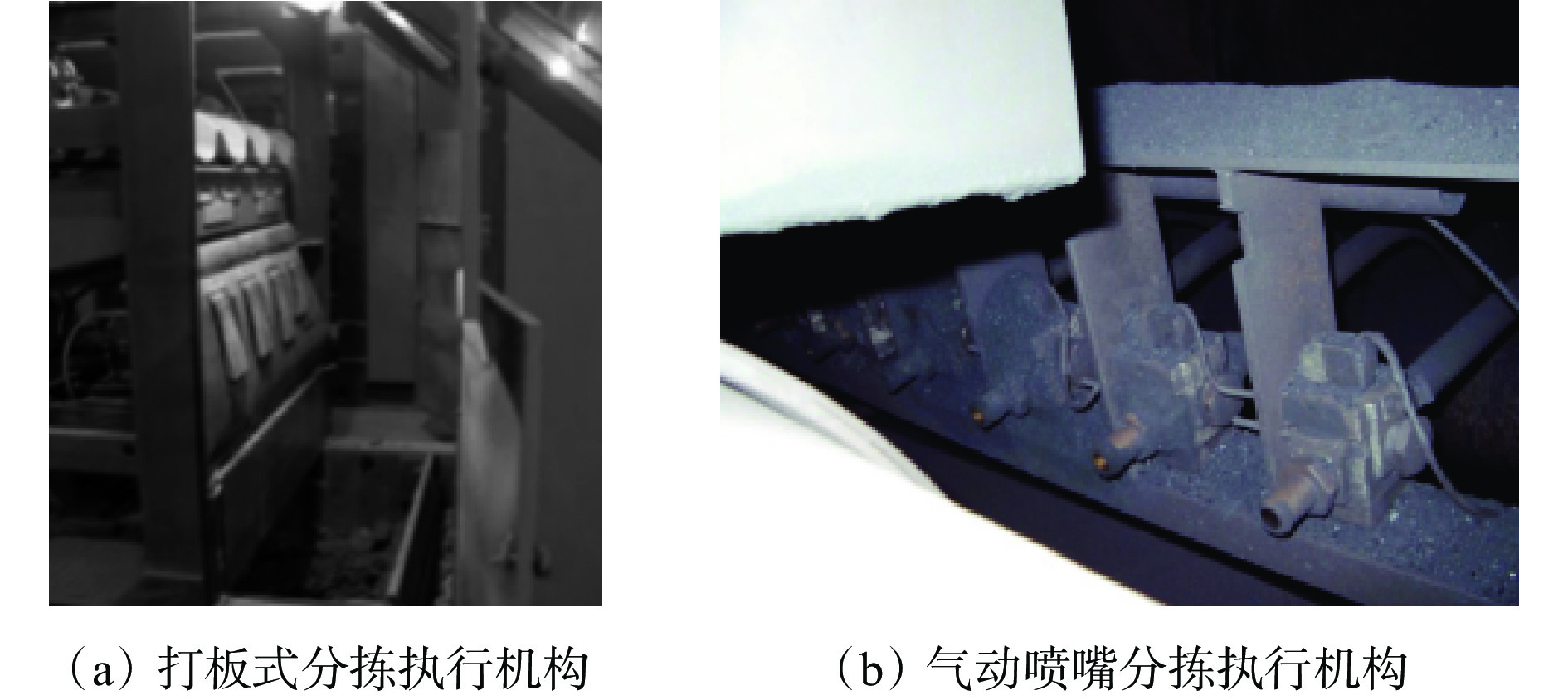
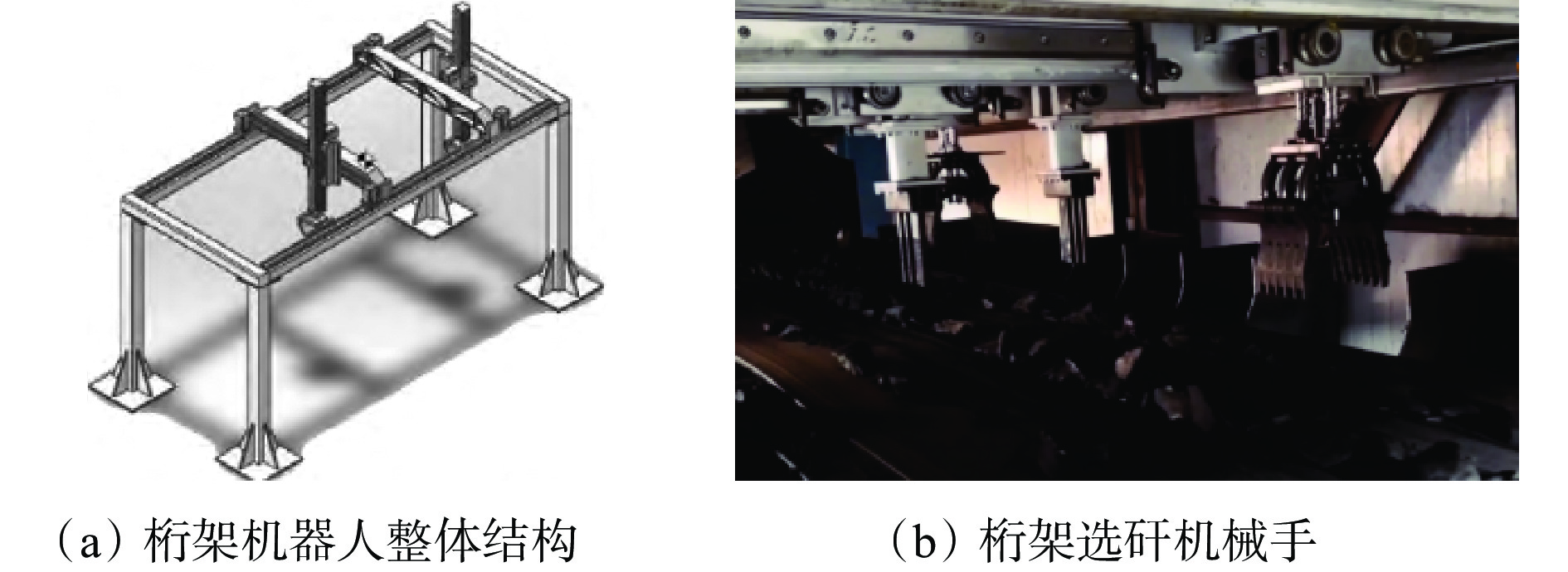
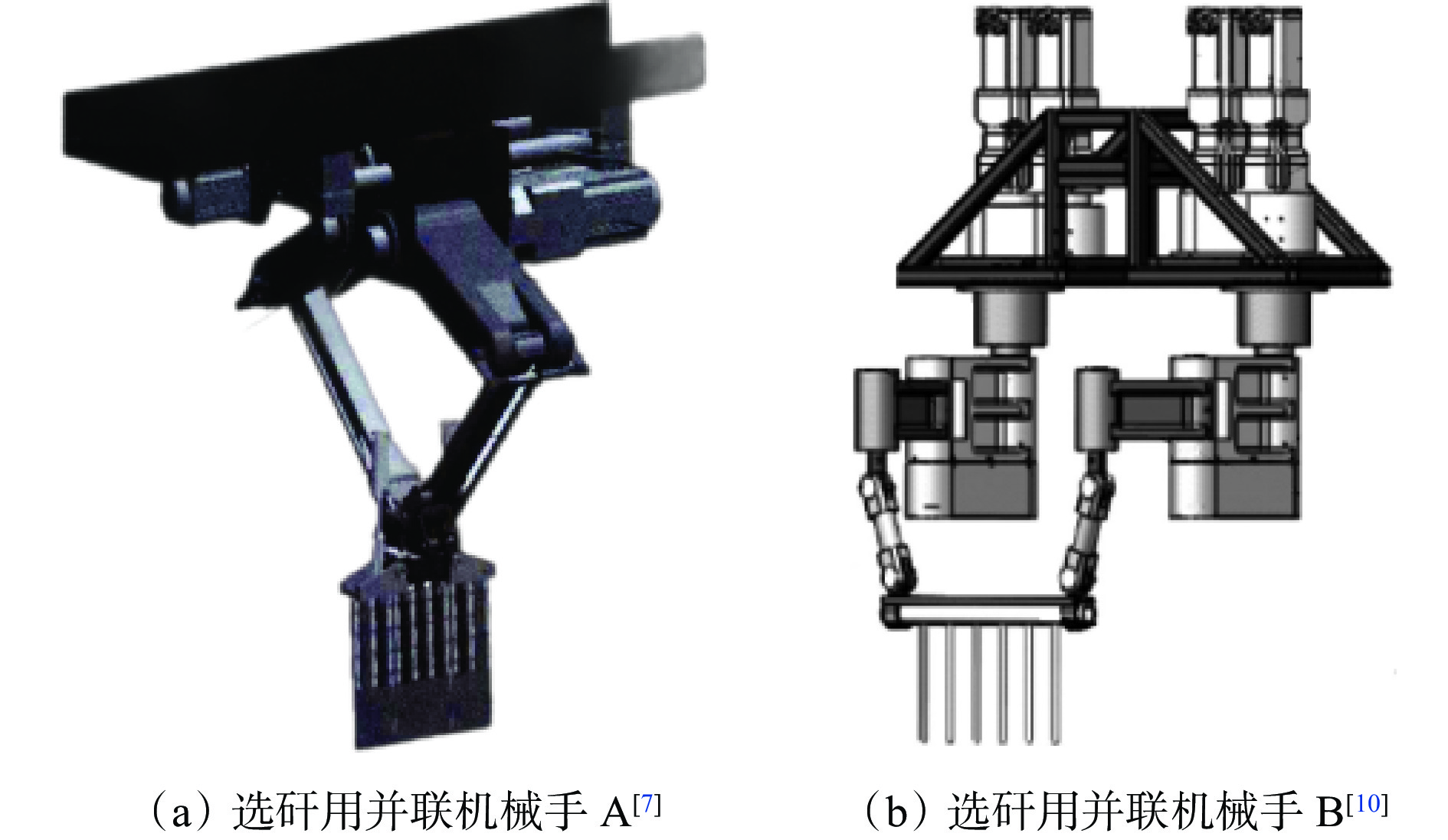
摘要: 介绍了智能选矸机器人应用与研究现状,指出目前智能选矸机器人主要基于X射线和图像识别原理,利用高压气动分拣和桁架机器人抓取进行煤矸分离;智能选矸机器人分拣执行机构主要有桁架式、并联式、串联式等类型,响应速度快,常常以“拨”和“抓”的形式分离矸石;在胶带运输过程中,智能选矸机...
2022, 48(6): 77-86, 117.
DOI: 10.13272/j.issn.1671-251x.17915
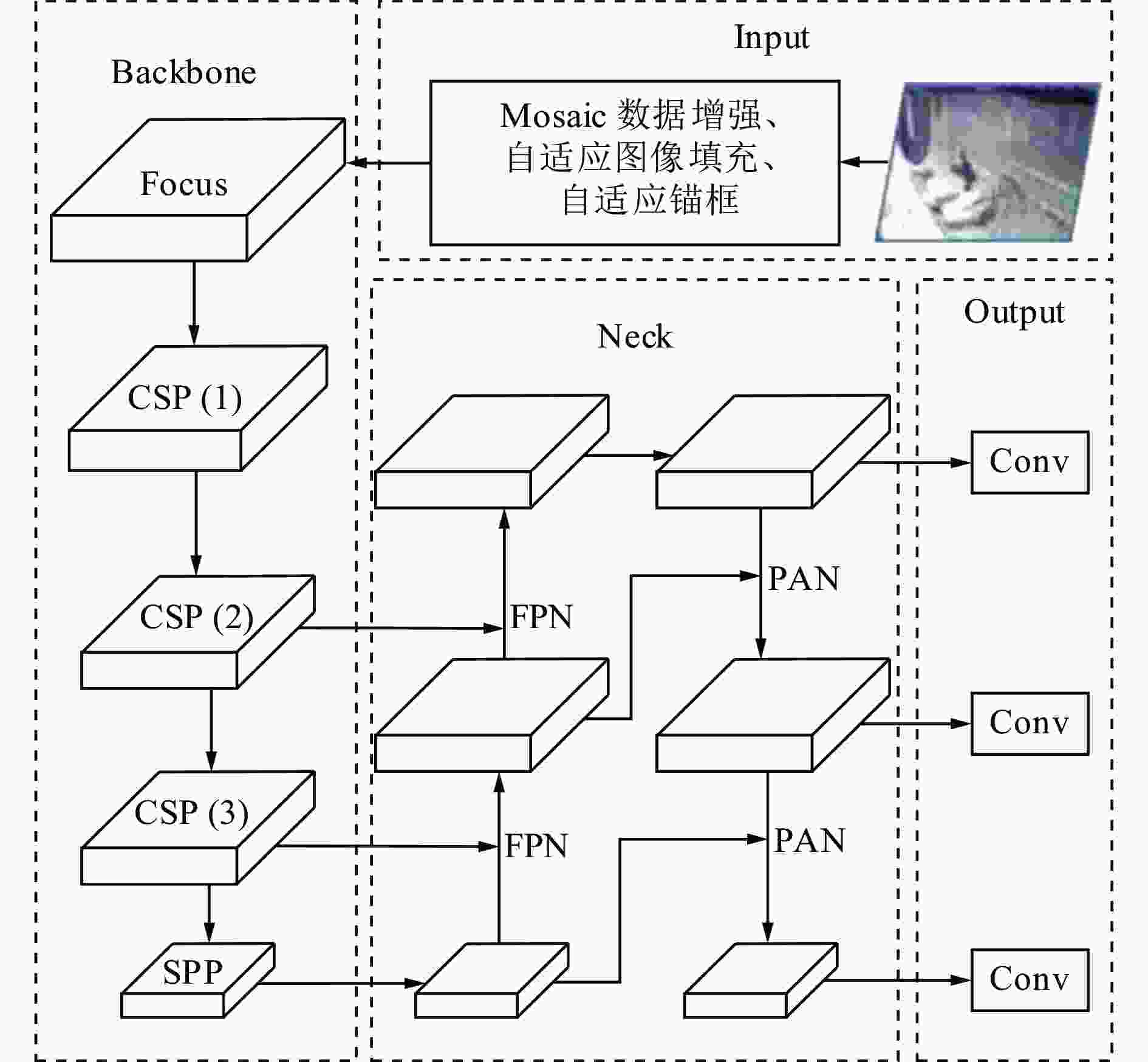
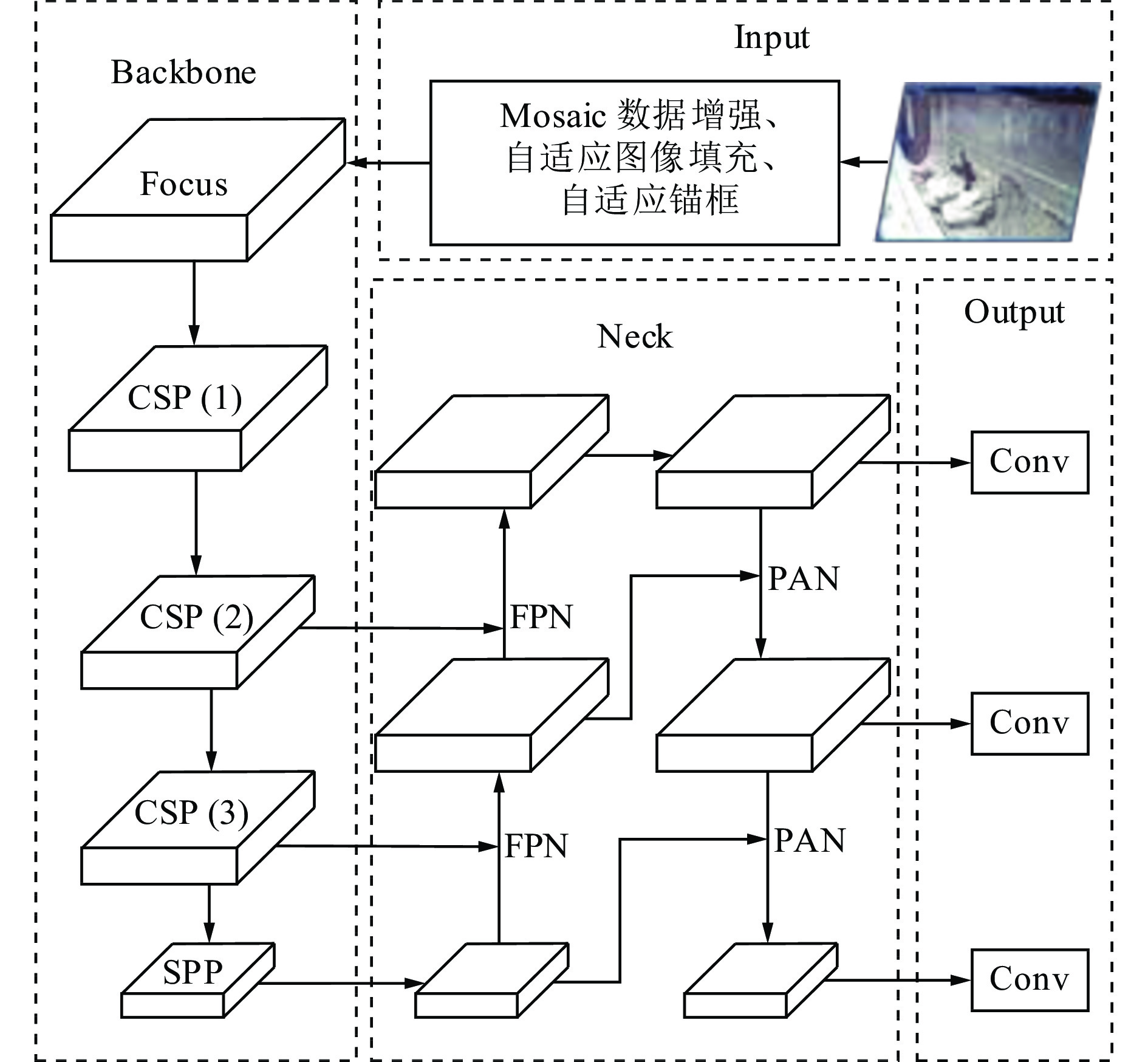
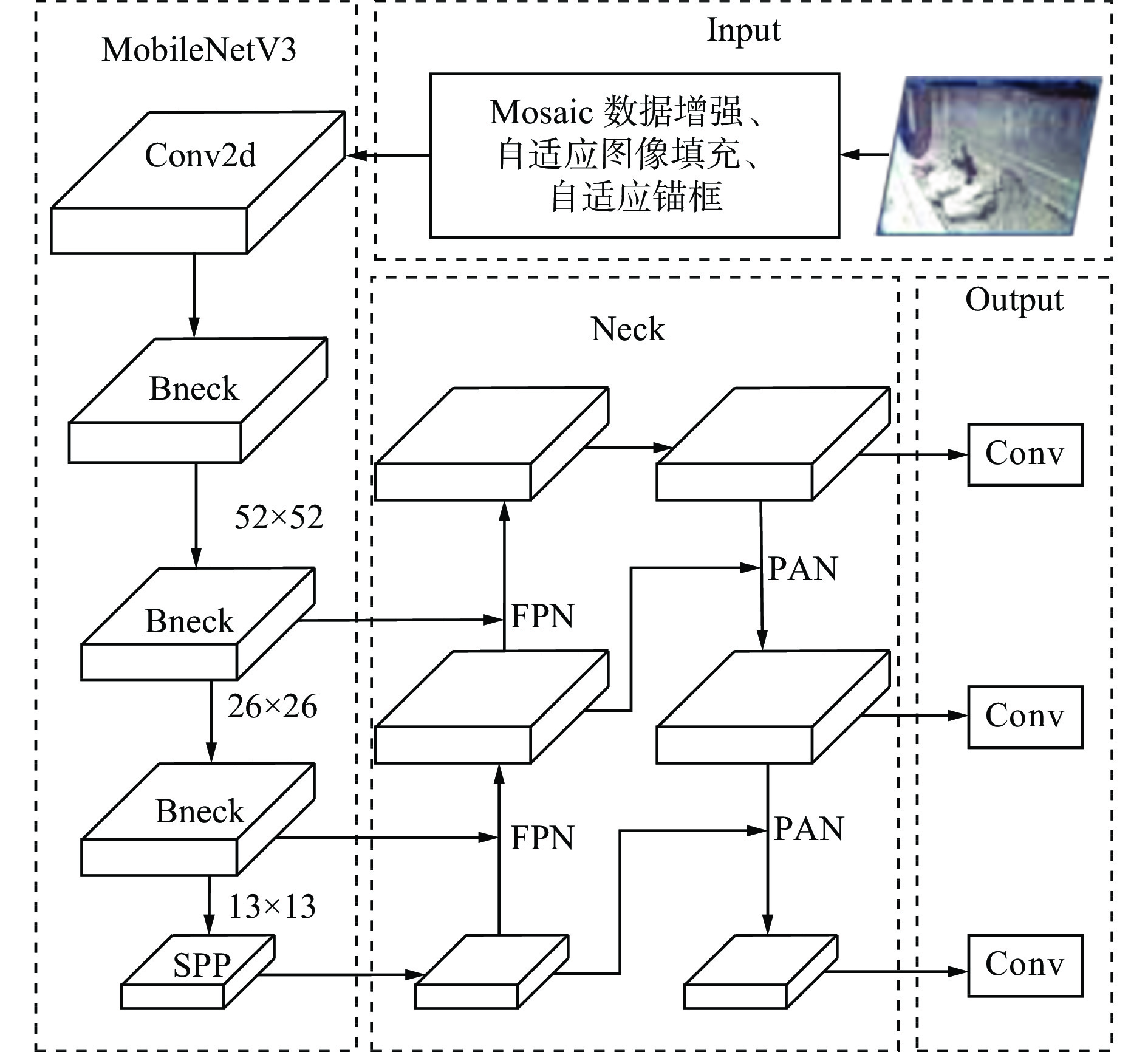
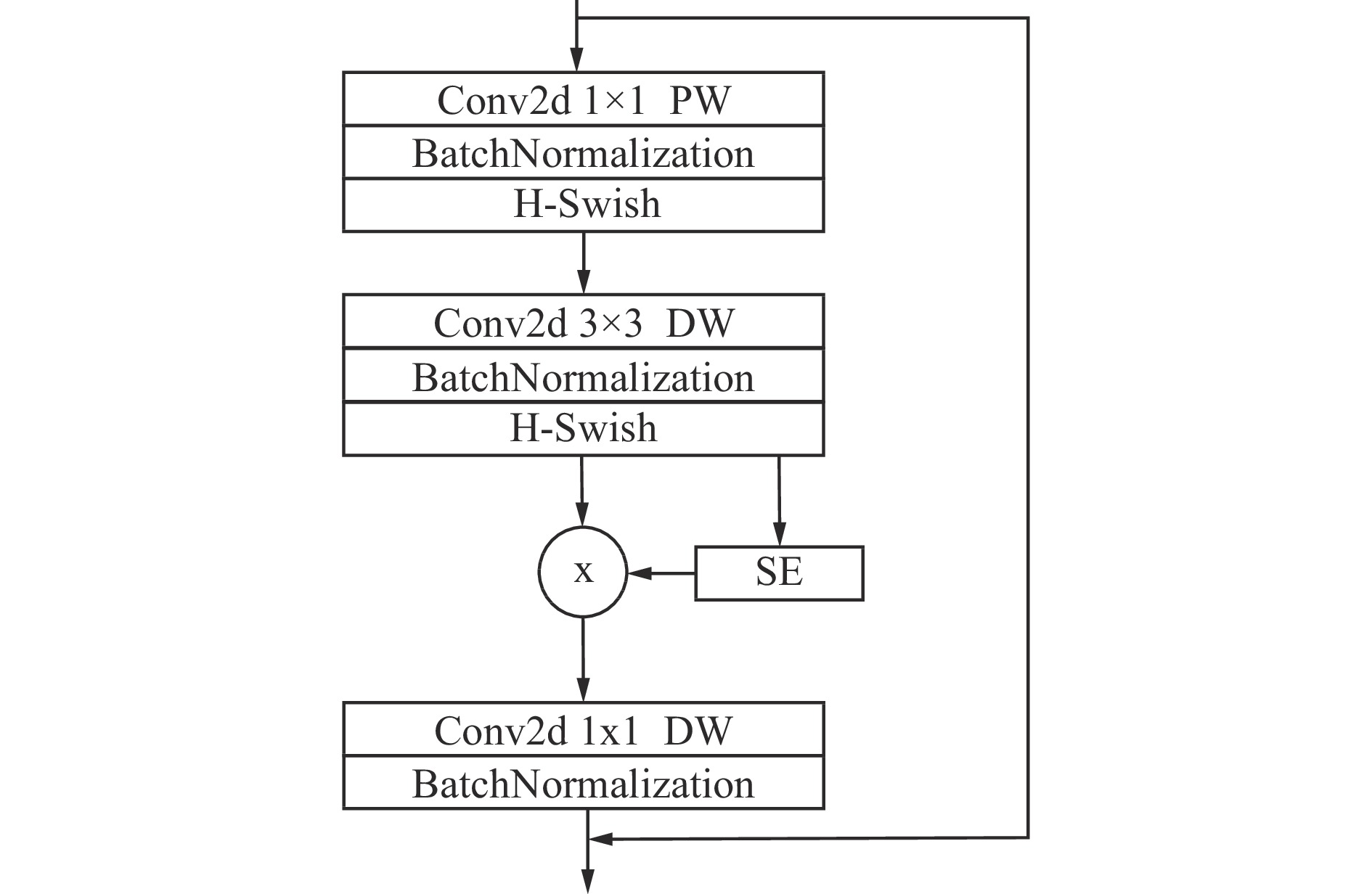
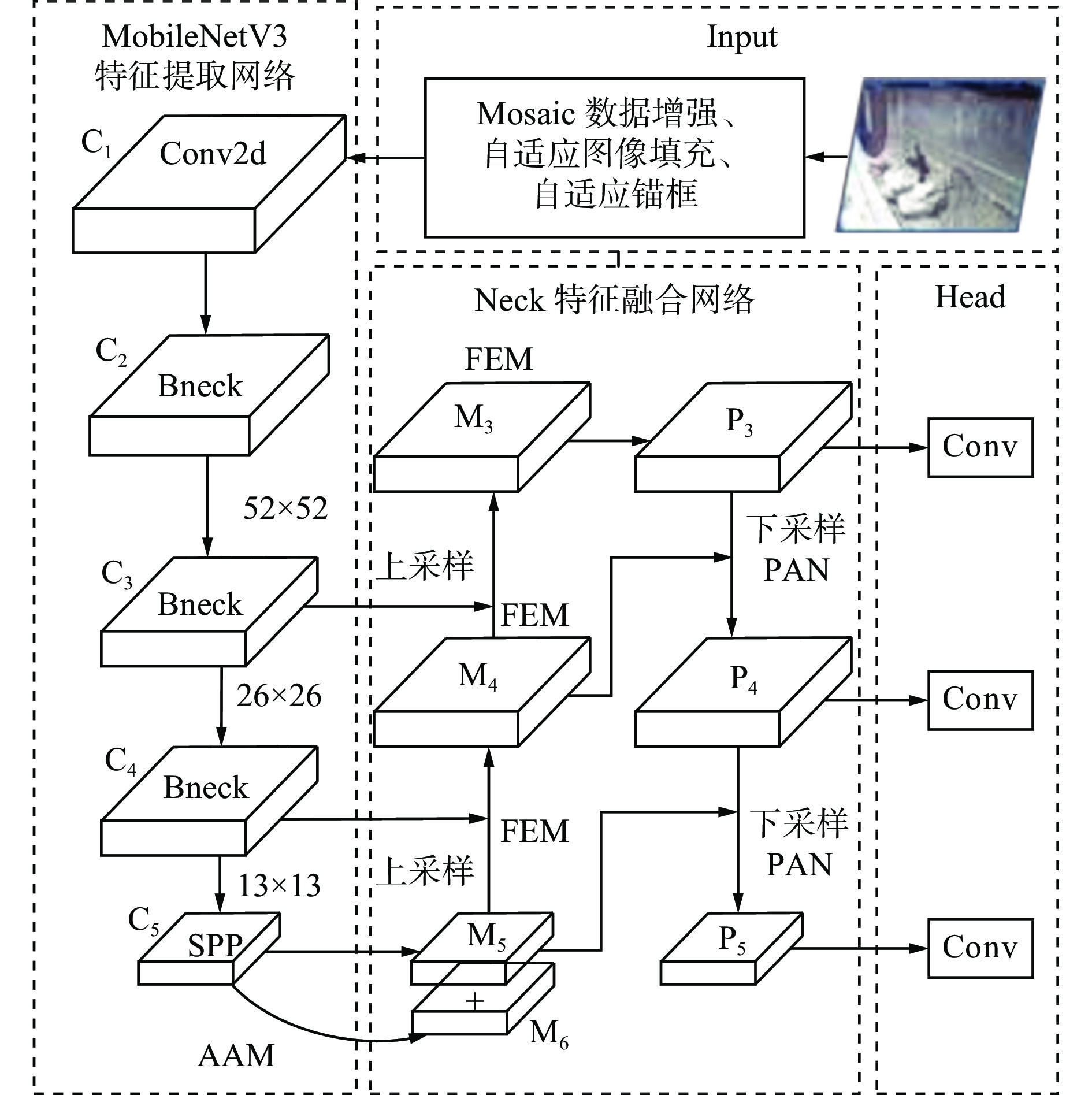
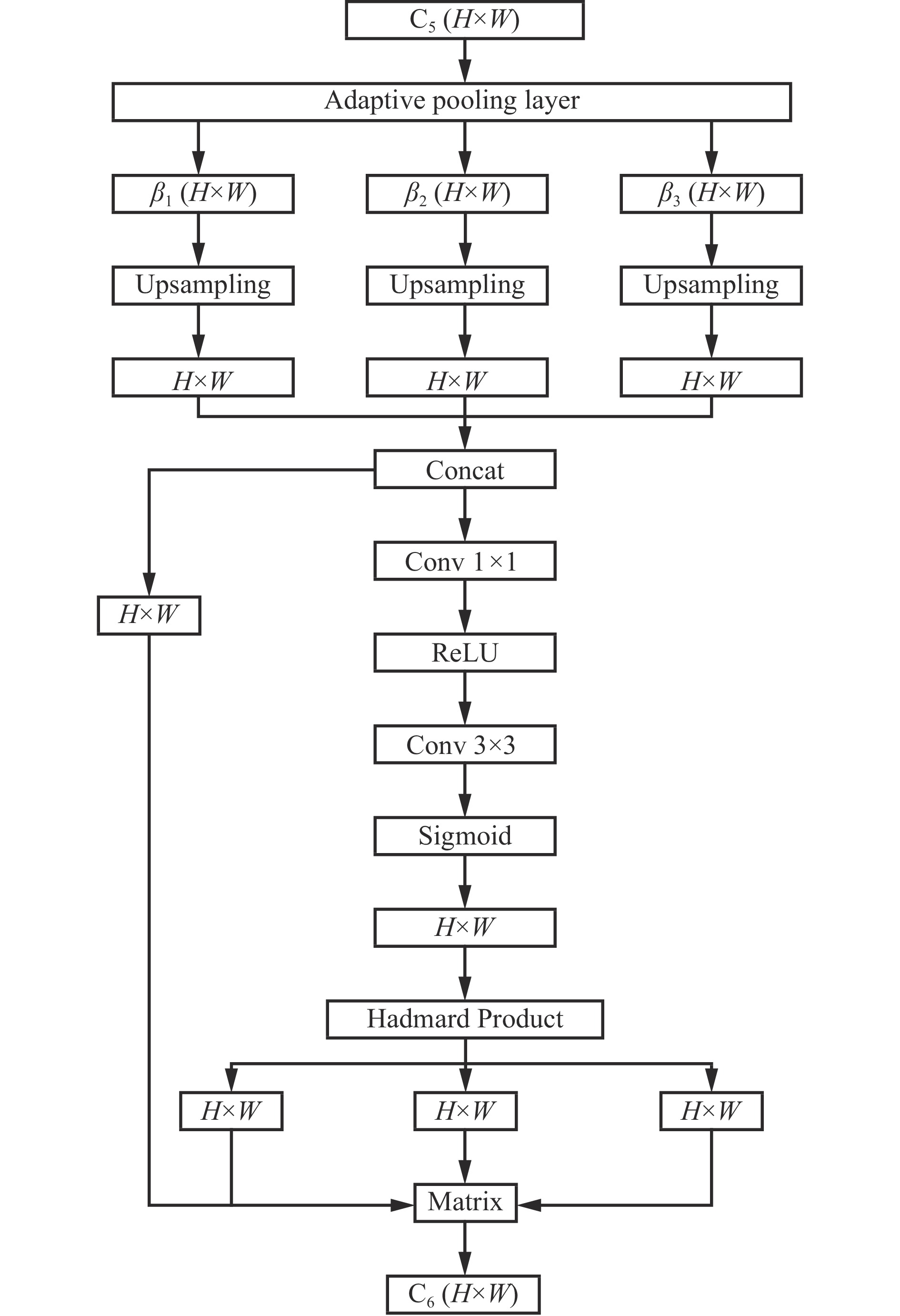
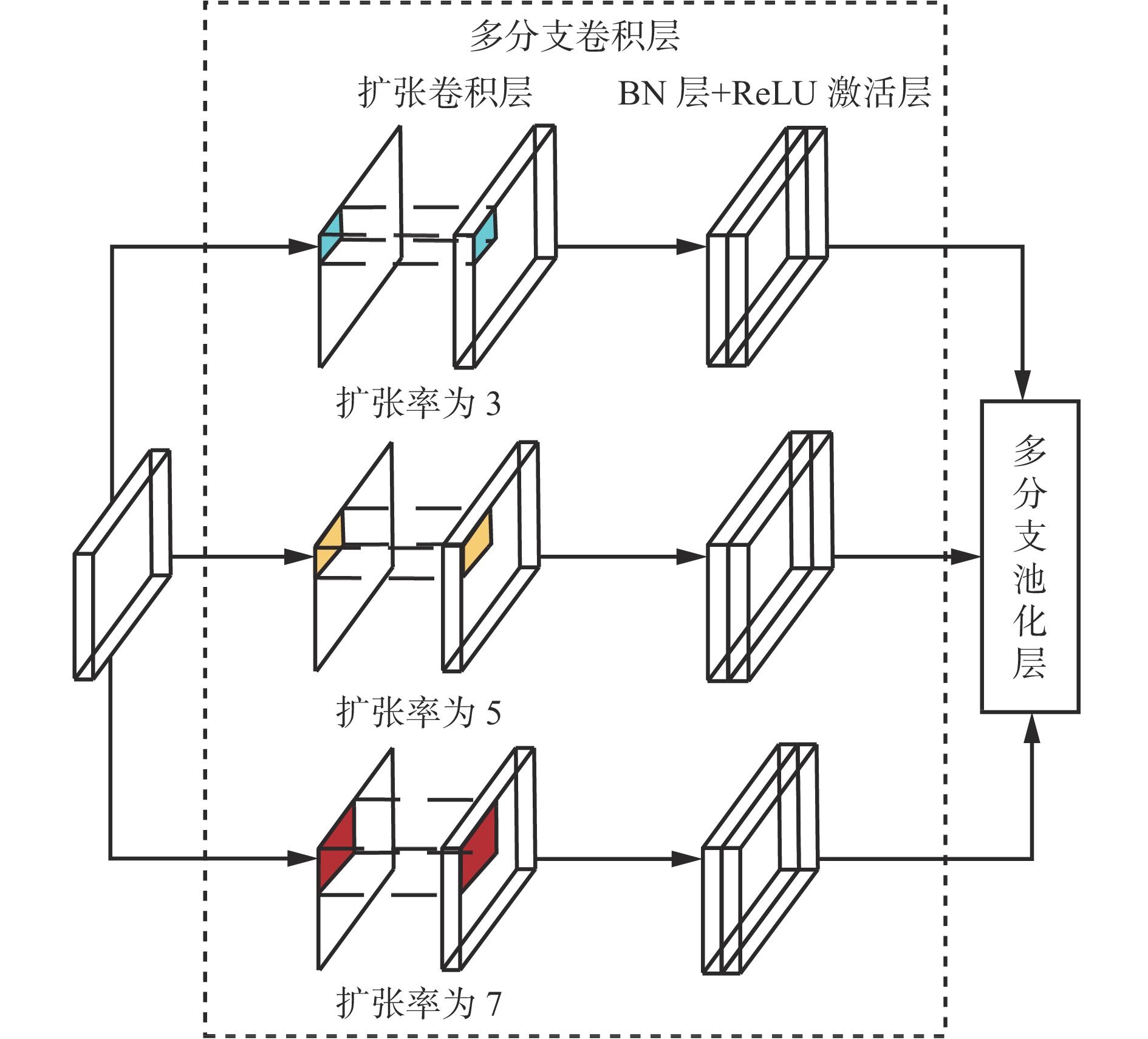
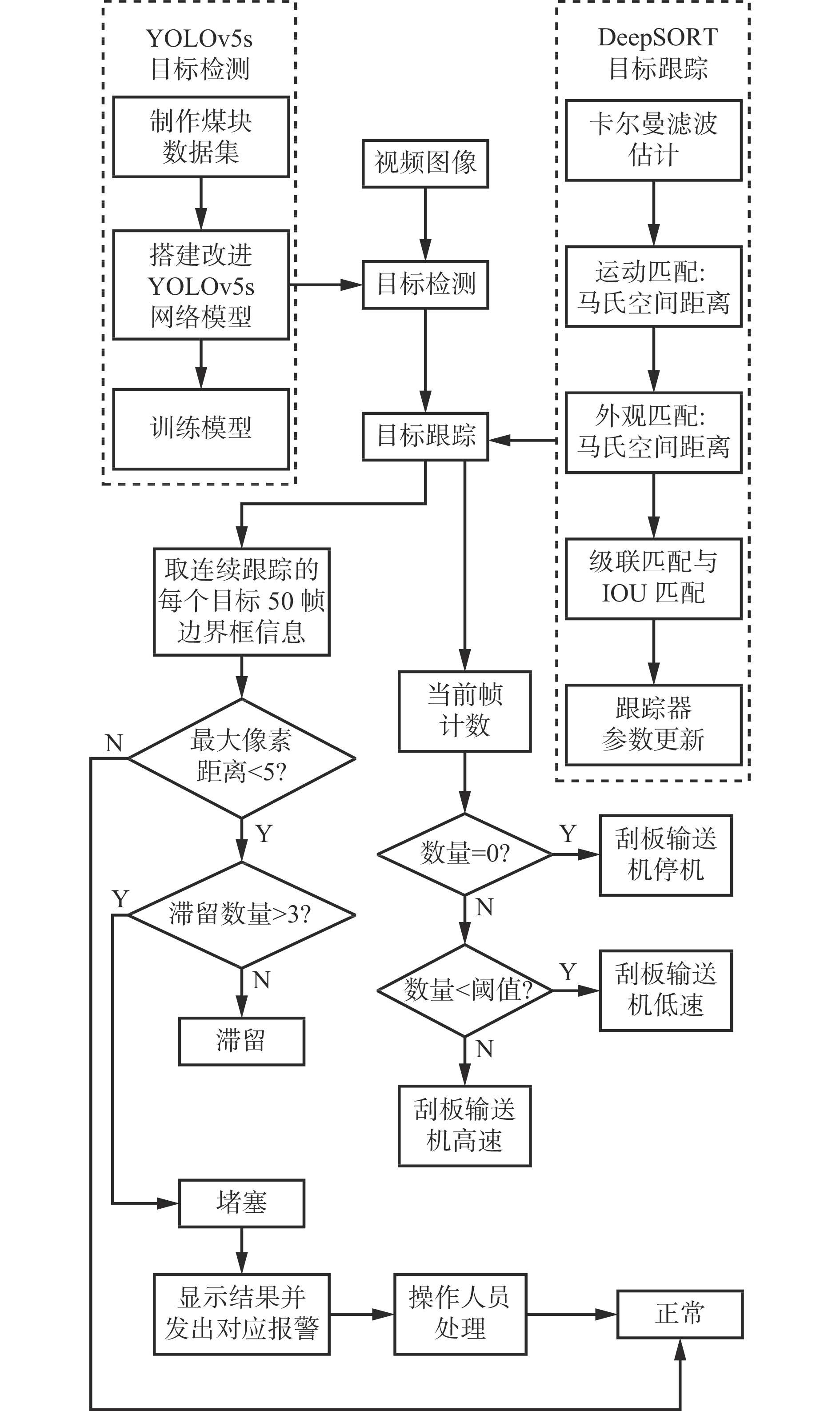
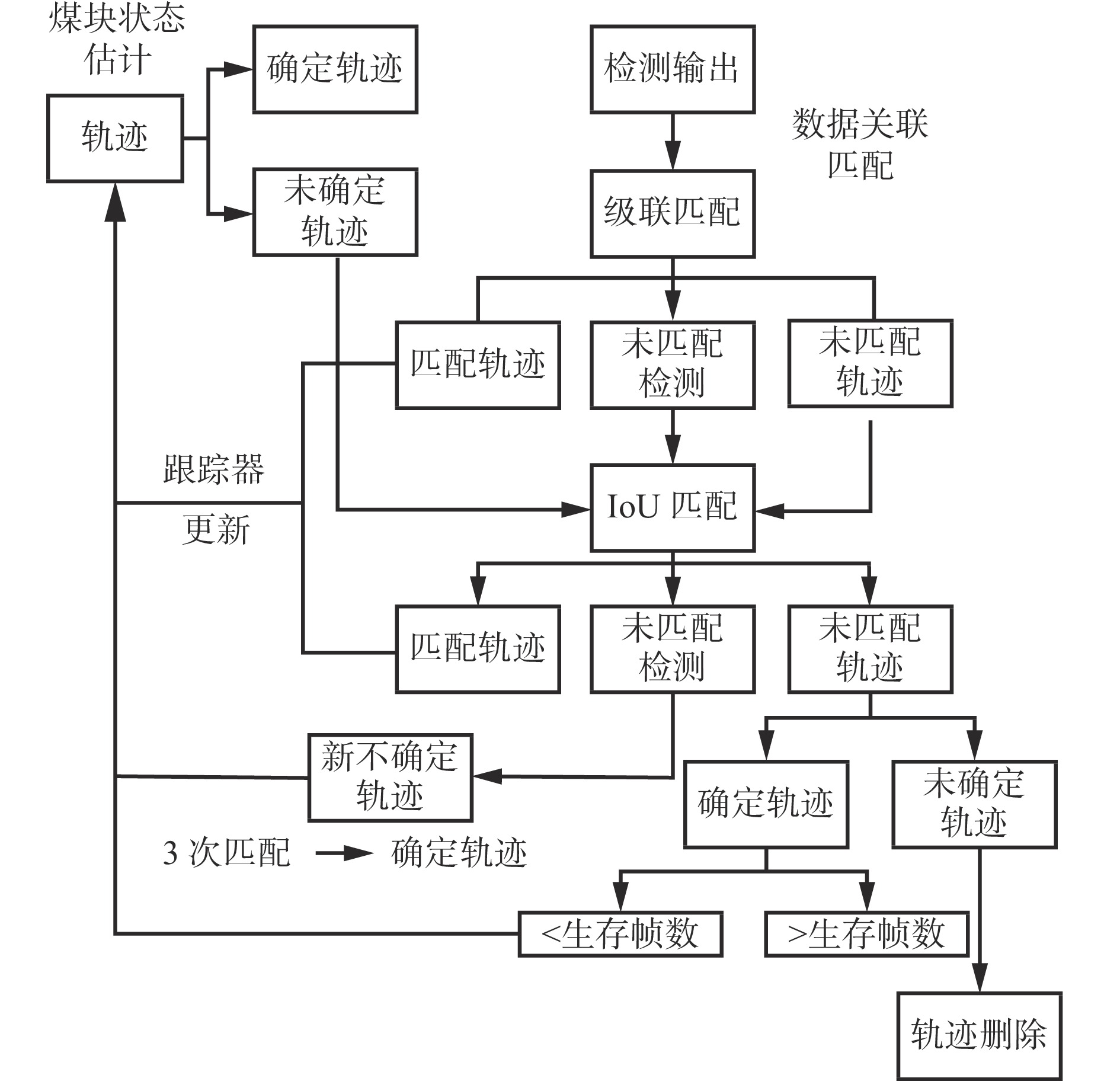
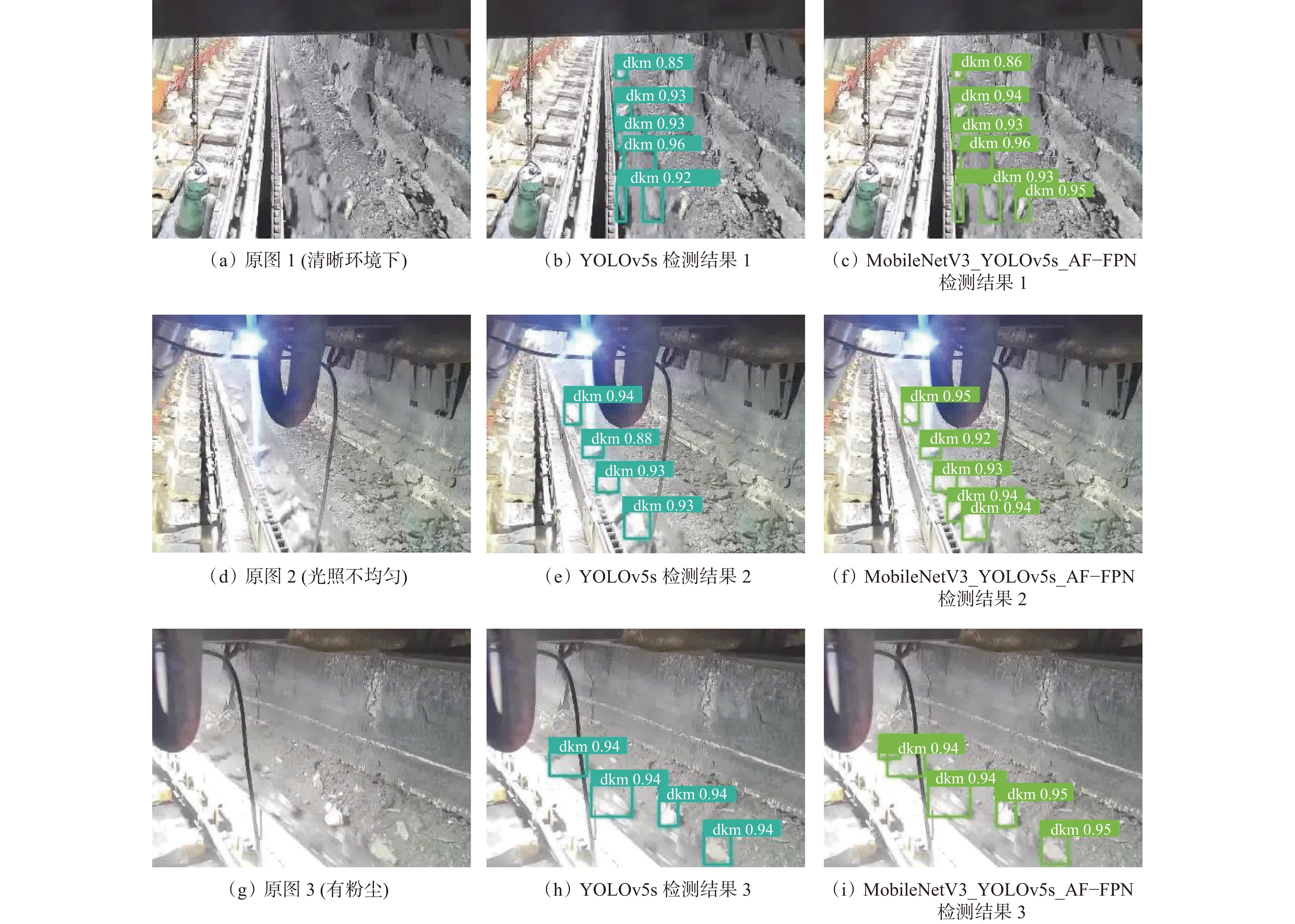
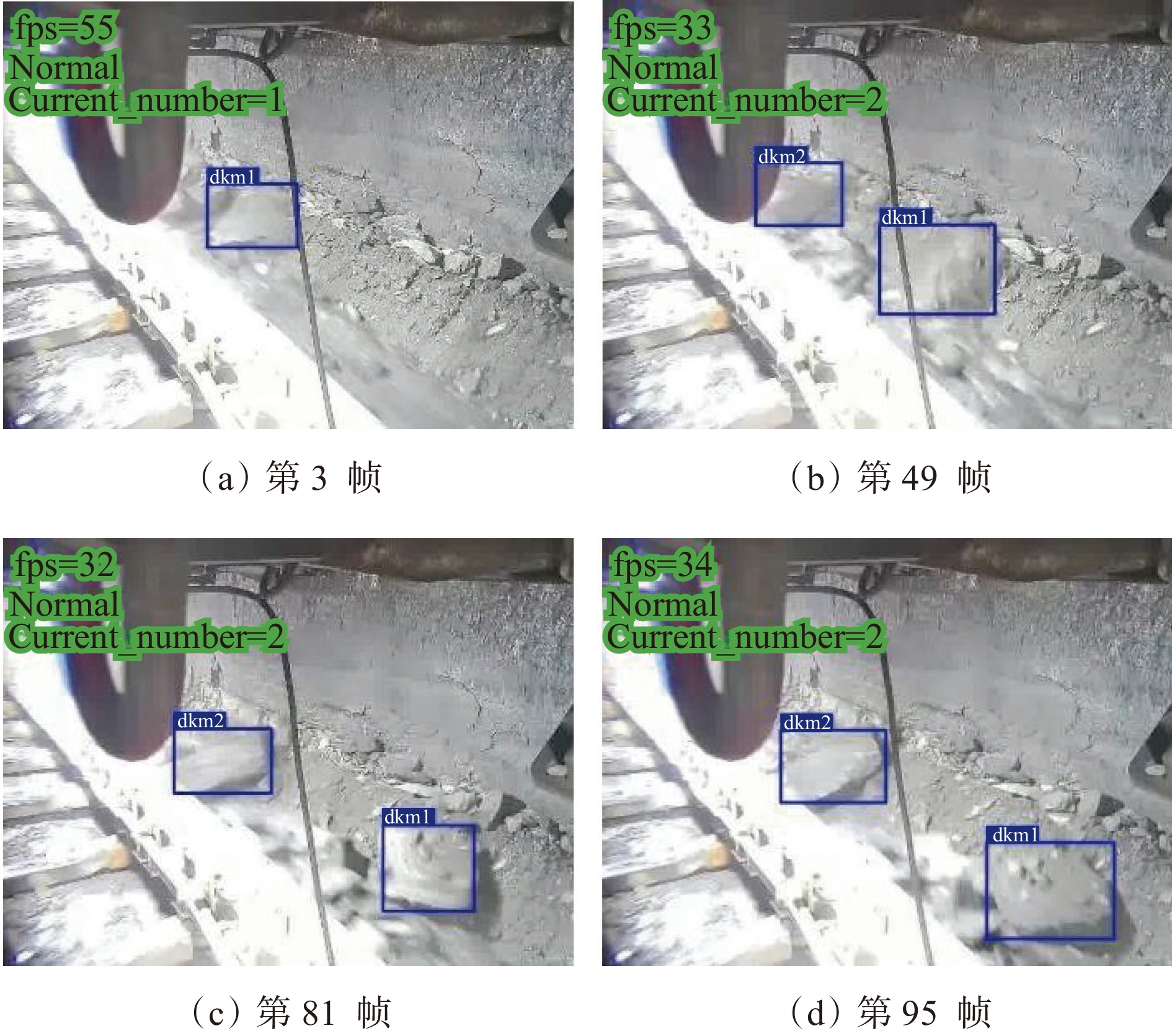
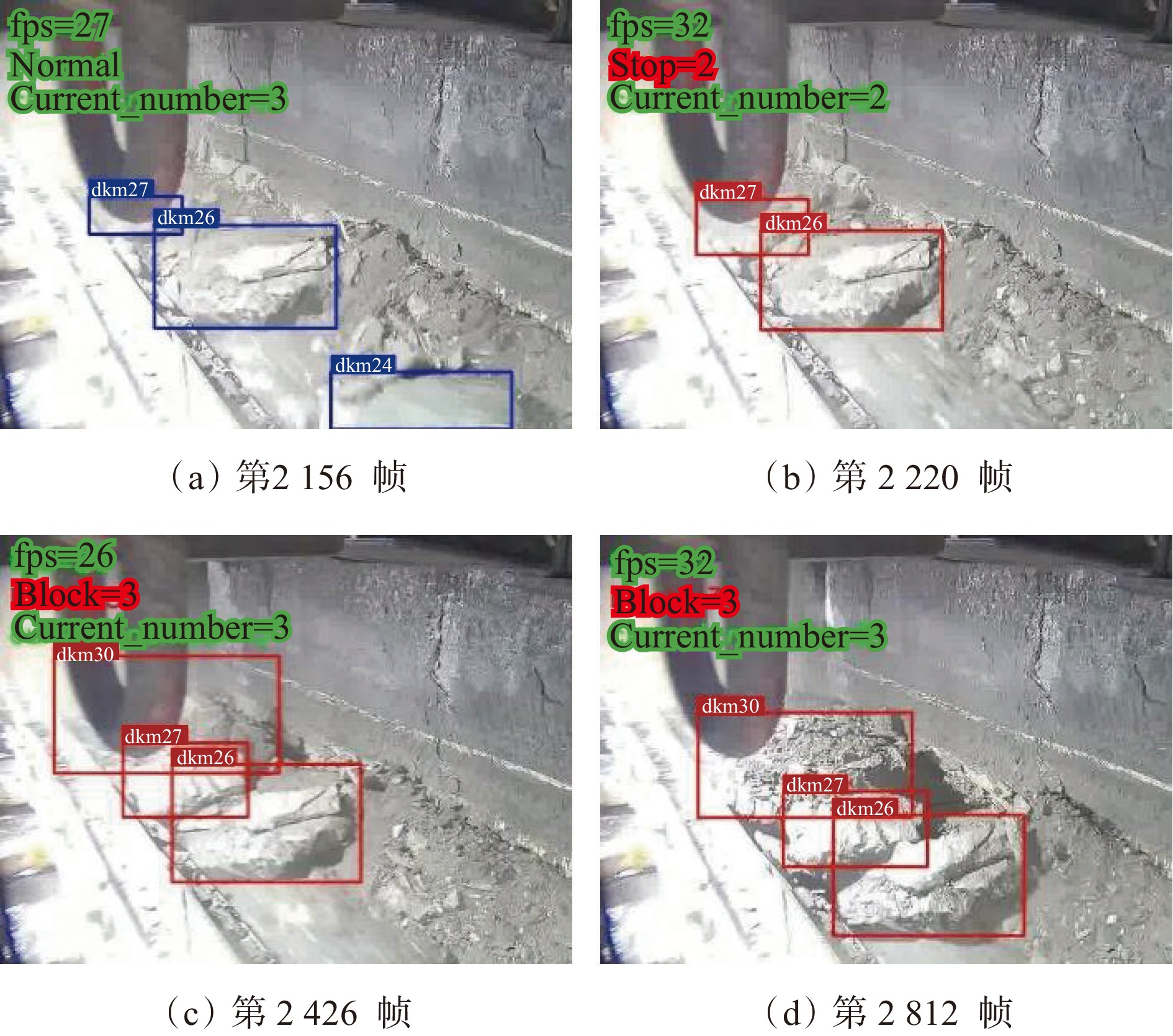
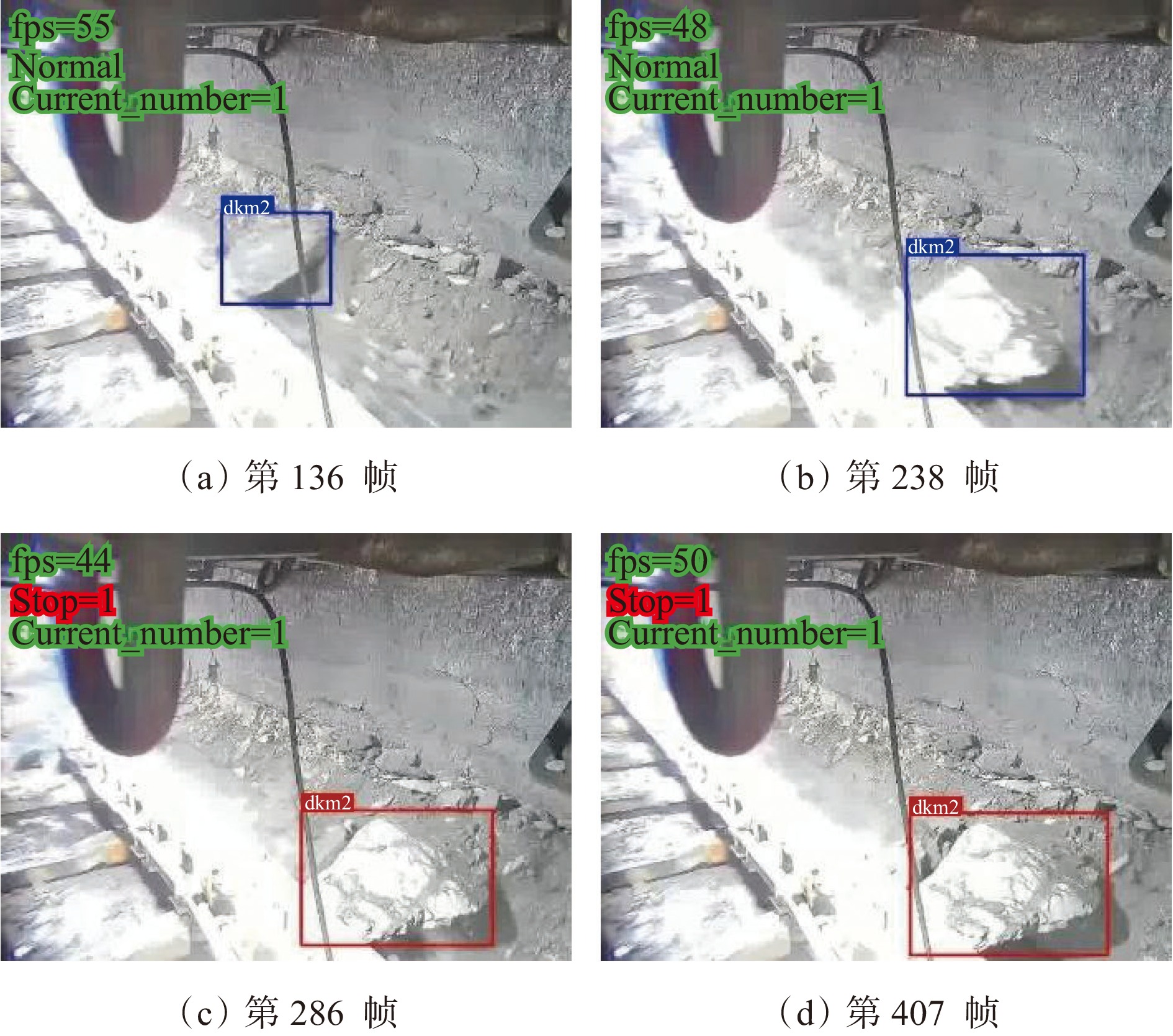
摘要: 煤块检测方法主要包括传统图像检测方法和深度学习目标检测方法。传统图像检测方法检测精度不高、实时性较差、无法对堆煤进行准确判断;深度学习目标检测方法虽然可以实现实时检测,但没有对煤块的数量、滞留和堵塞状态进行识别,而且识别模型参数较多。针对上述问题,提出了一种基于改进YOL...
2022, 48(6): 87-94, 127.
DOI: 10.13272/j.issn.1671-251x.17929
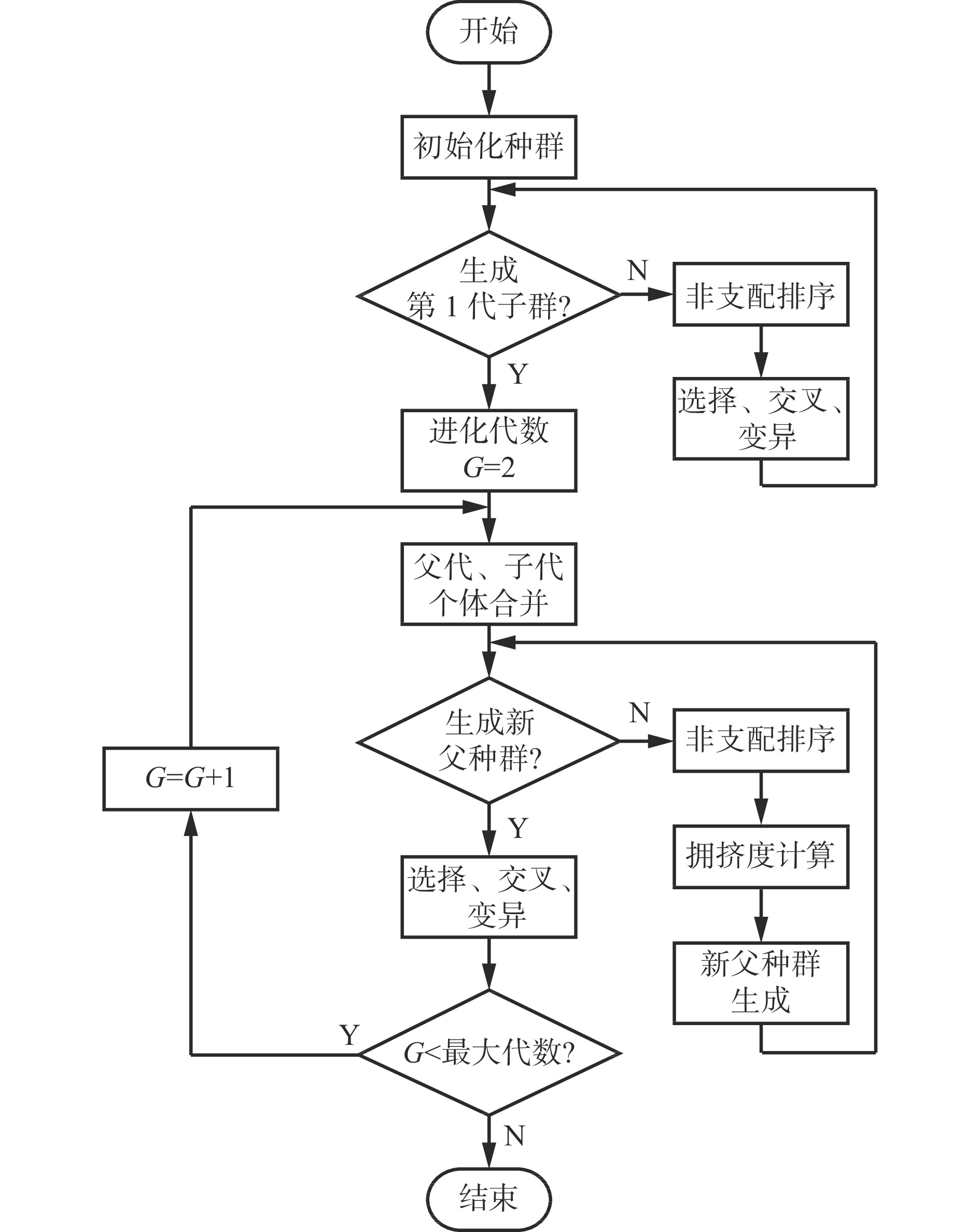
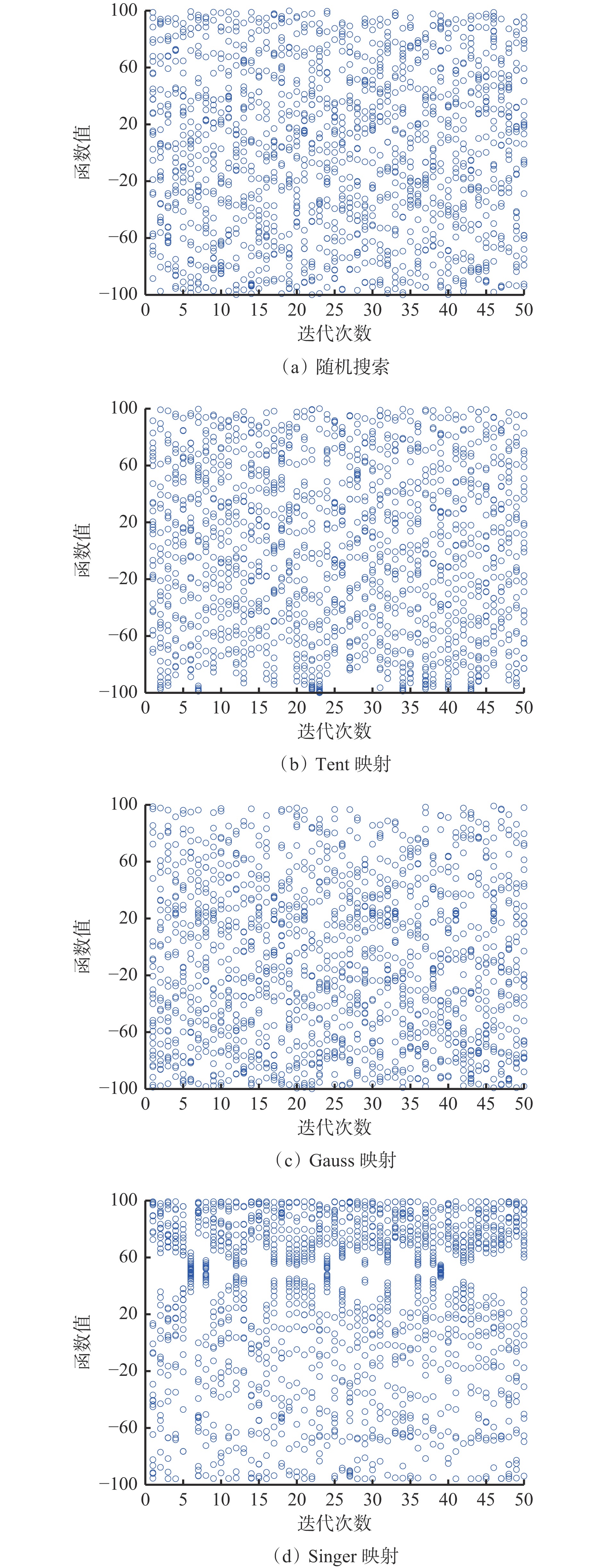
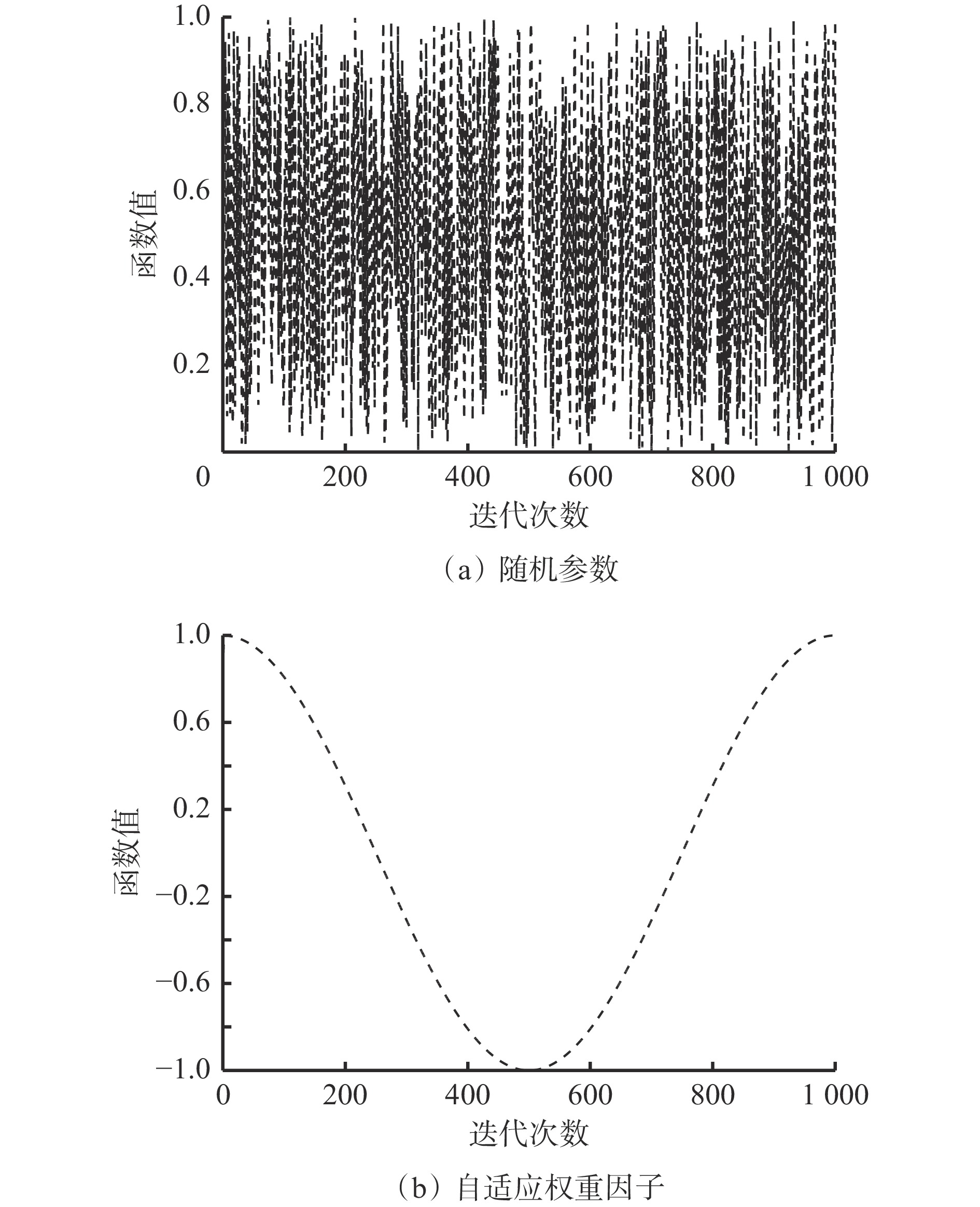
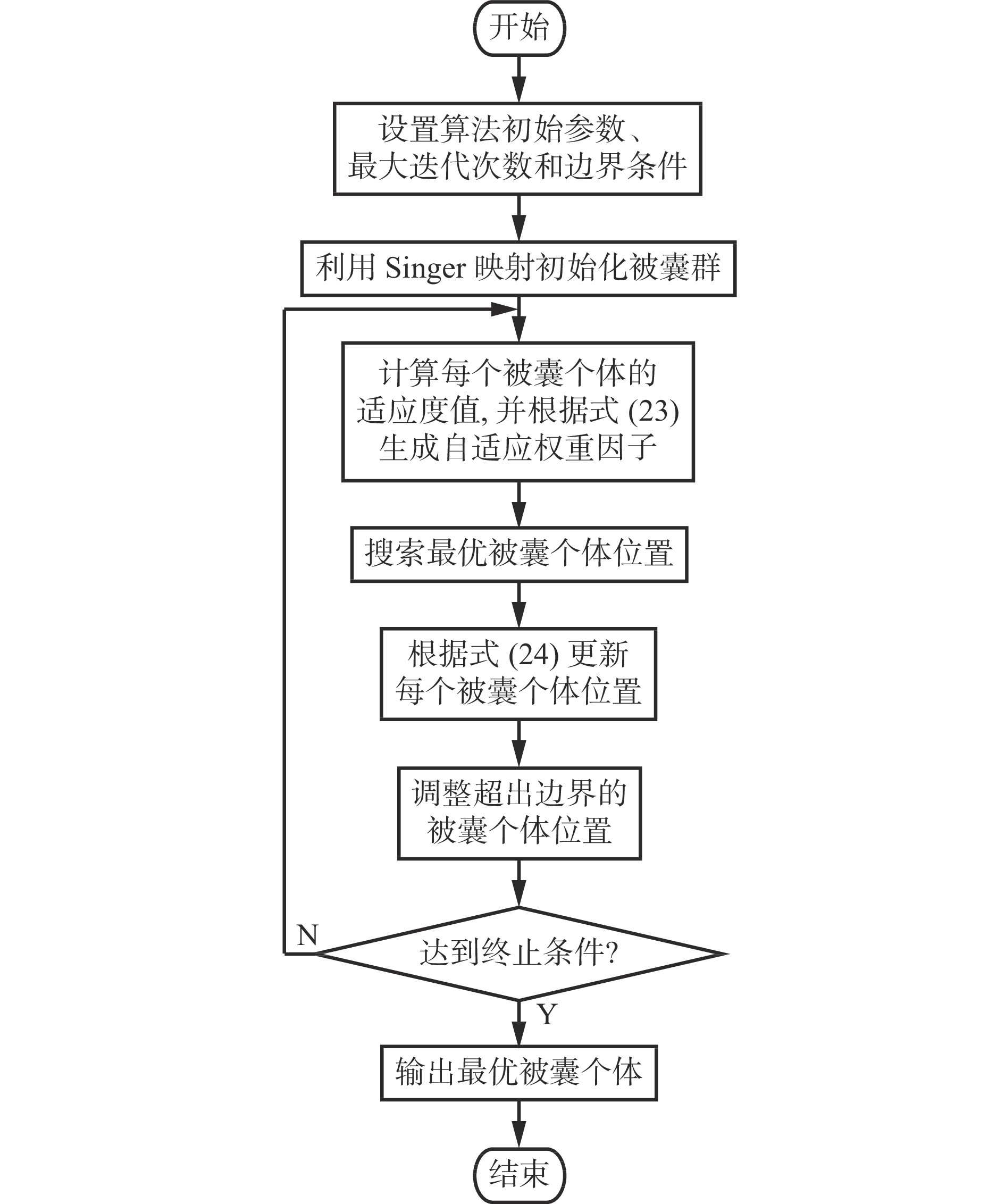
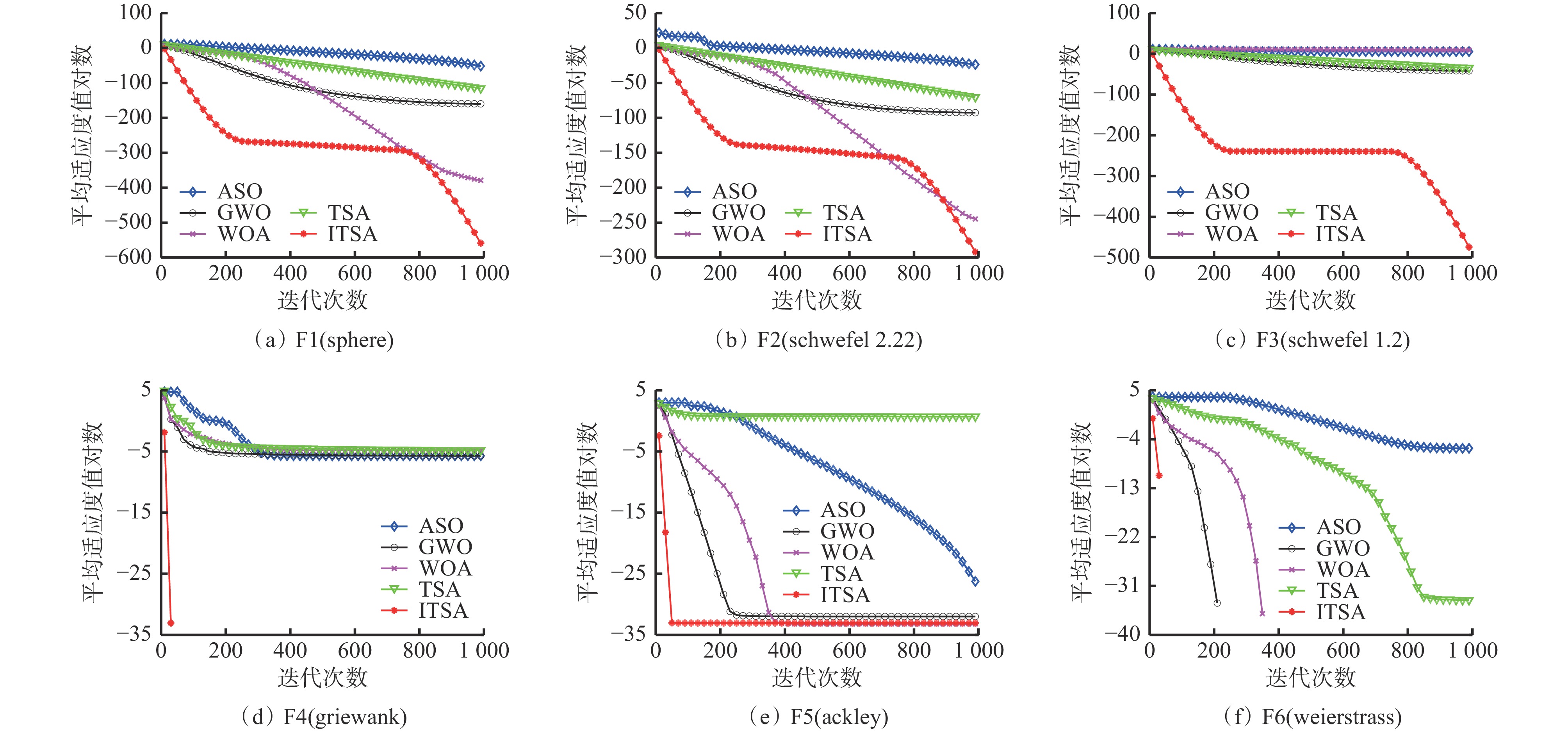
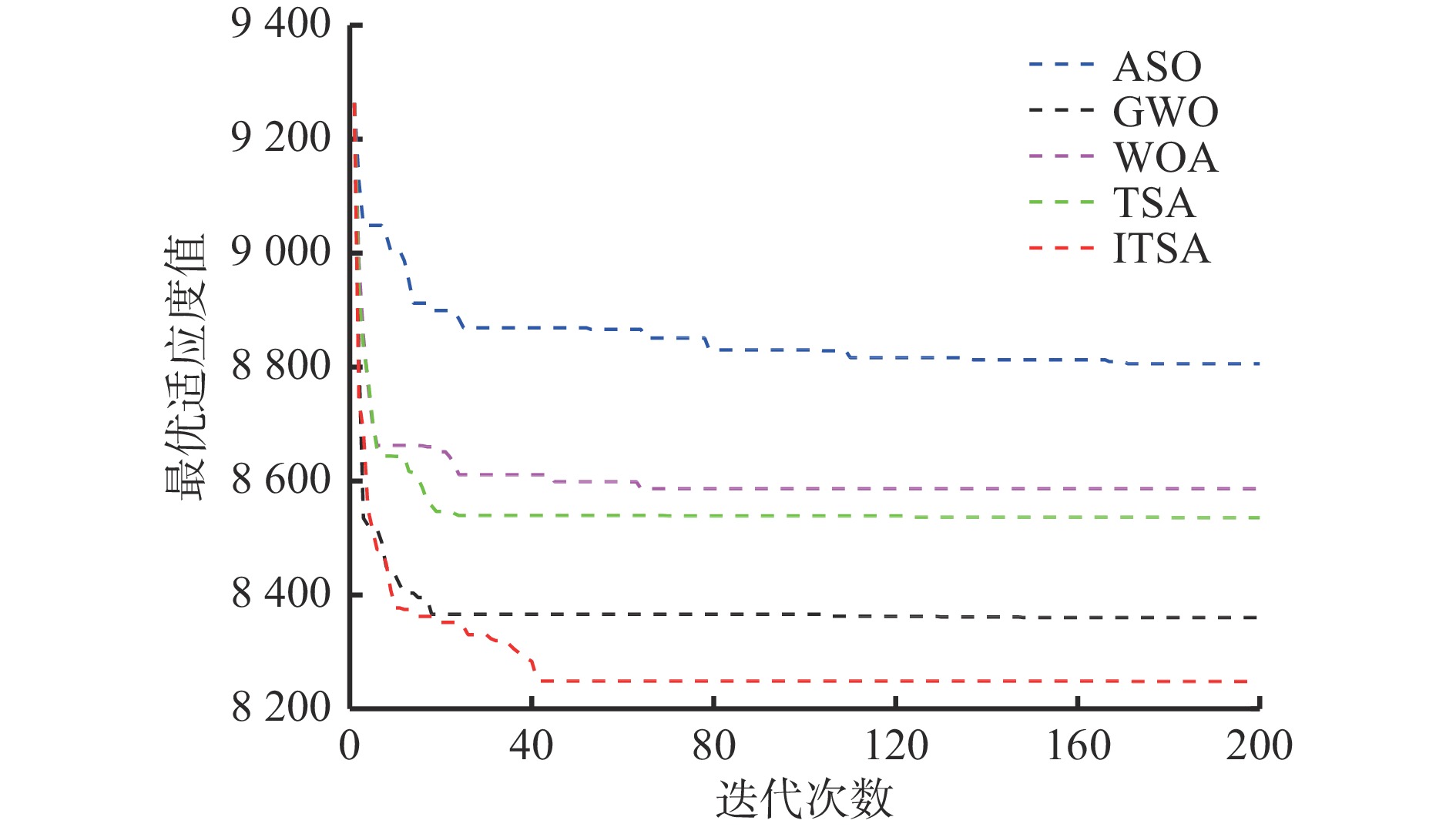
摘要: 针对露天矿无人驾驶卡车运输调度问题,以无人驾驶卡车燃油费用、固定启用费用、故障维修费用及网络基站建设与维护费用之和最小为目标函数,并以采矿场开采量、破碎场破碎量、卡车数量、卡车运输工作量为约束条件,建立了露天矿无人驾驶卡车运输调度优化模型。针对被囊群算法存在全局勘探和局部...
2022, 48(6): 95-99, 146.
DOI: 10.13272/j.issn.1671-251x.17916
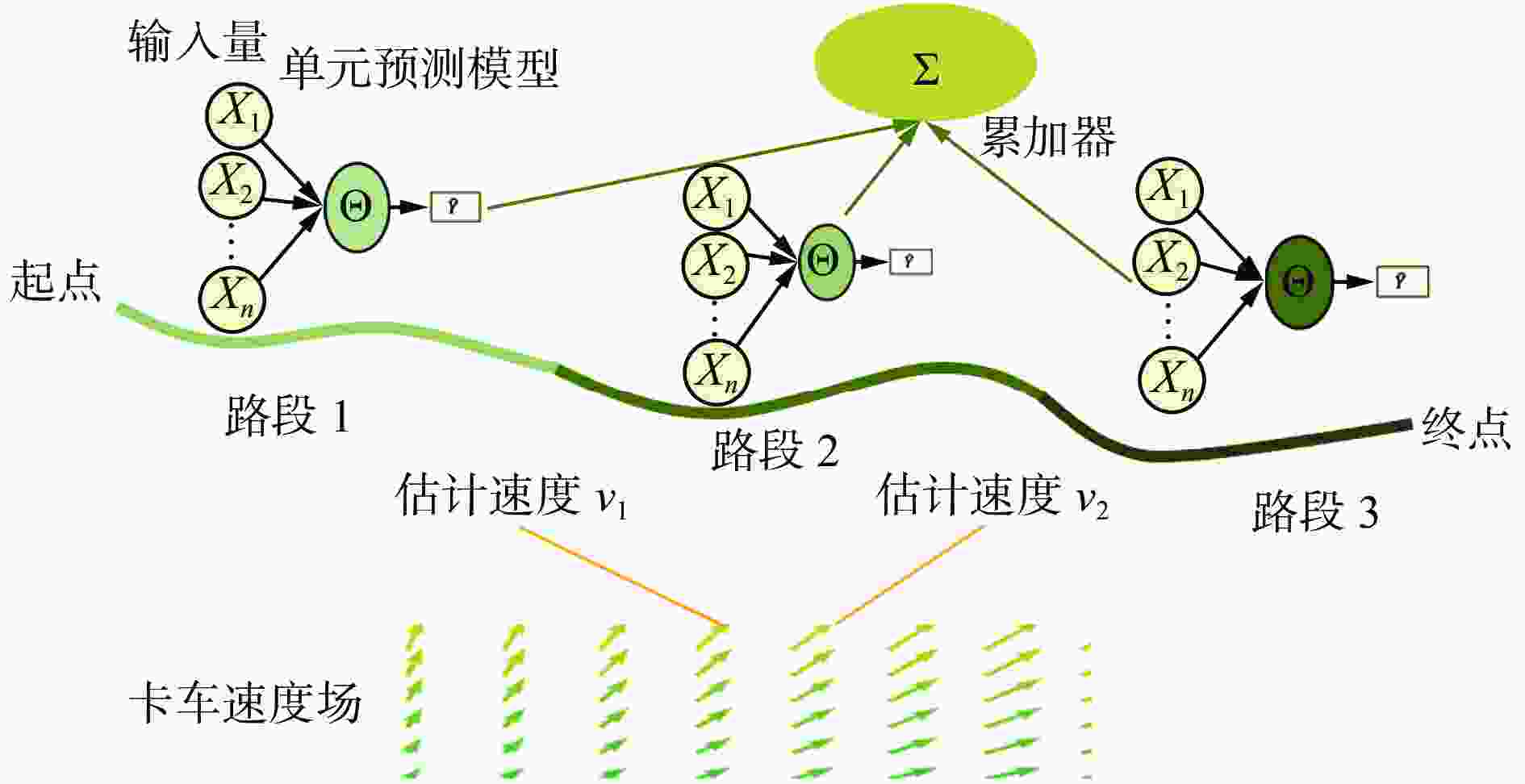
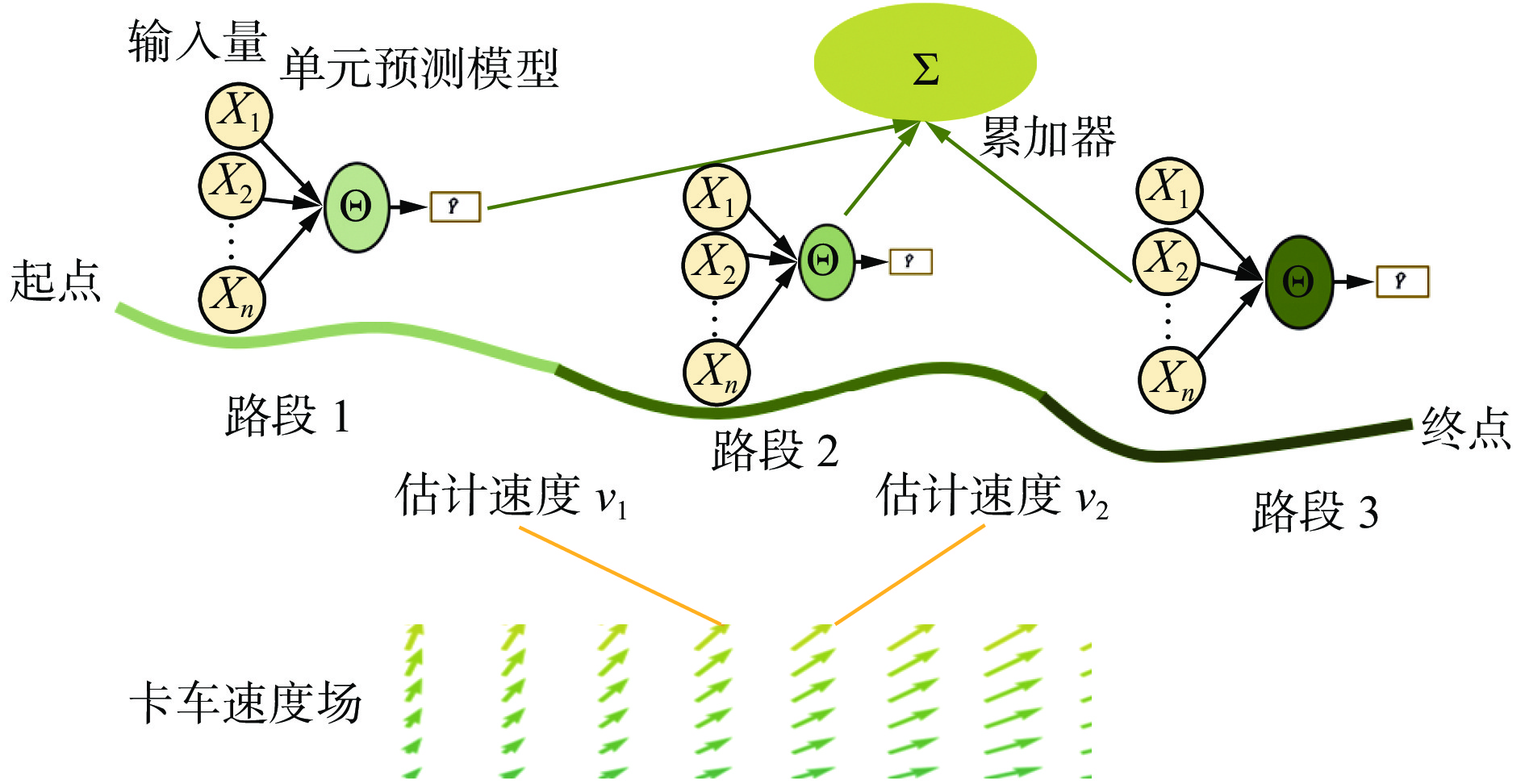
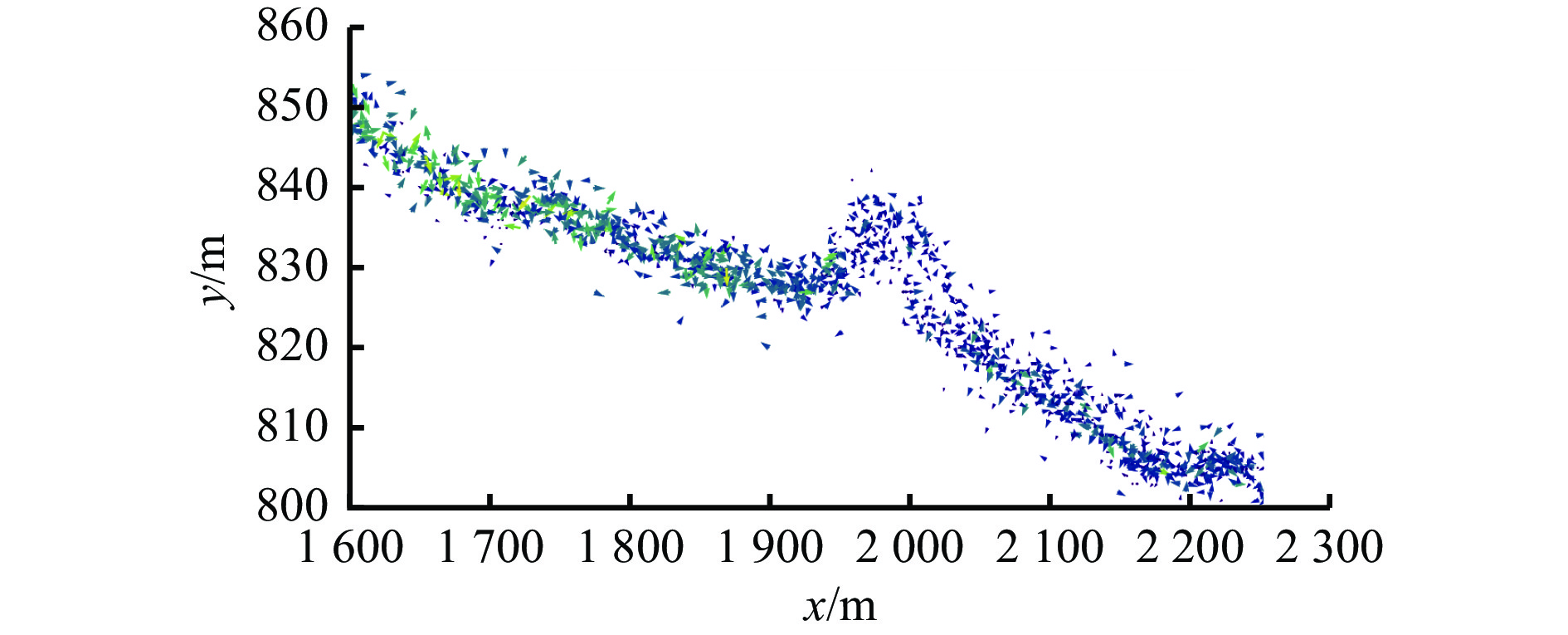
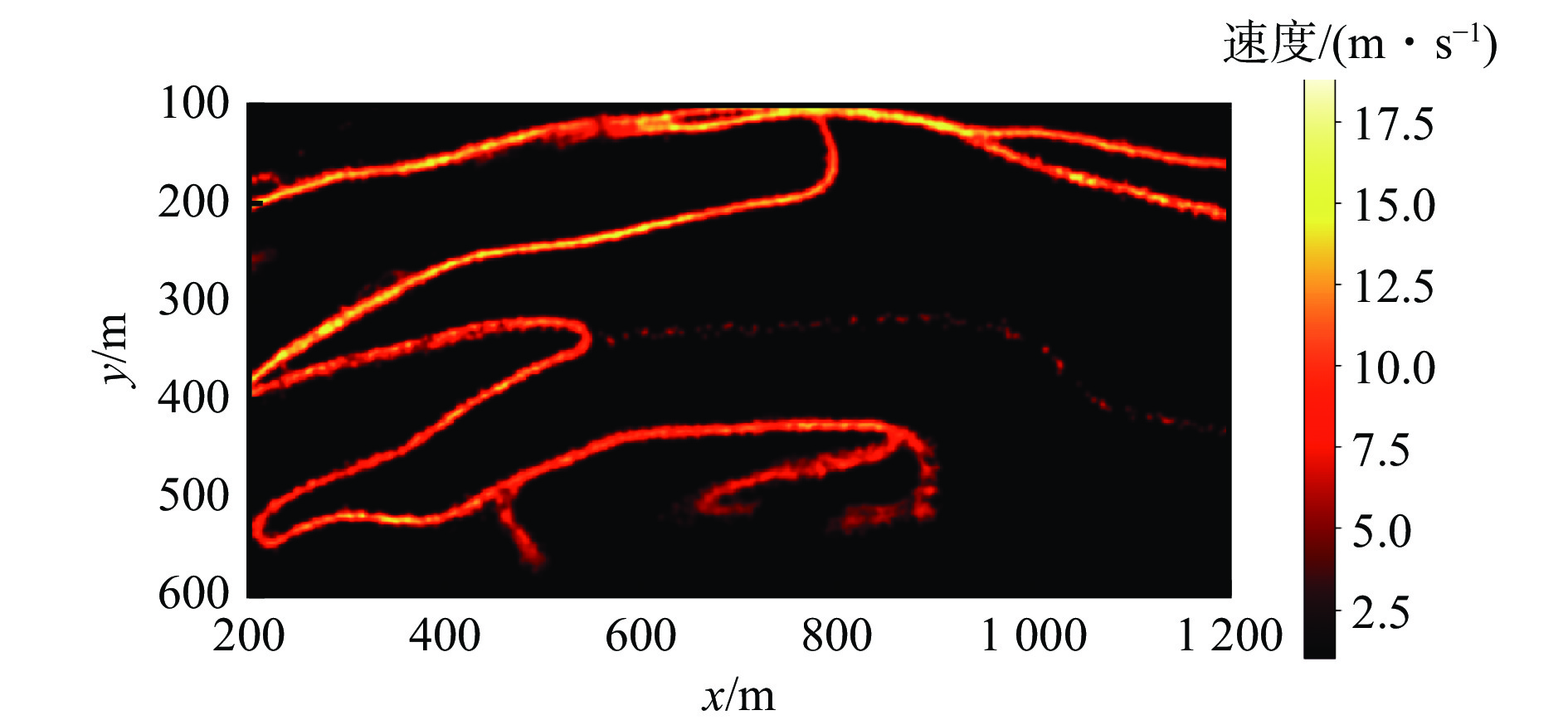
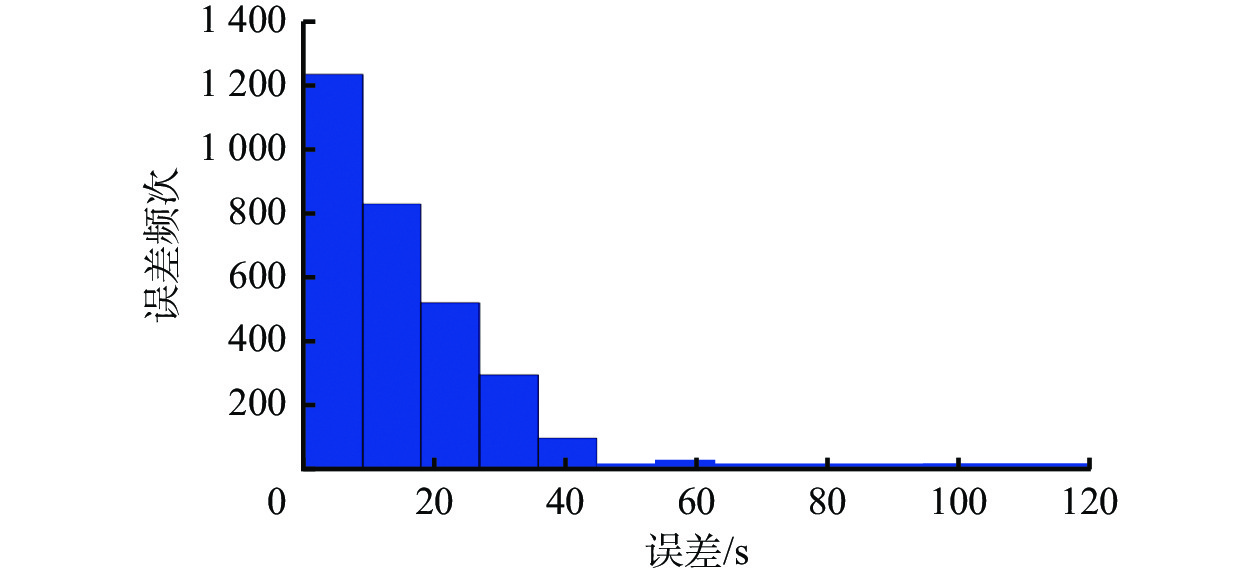
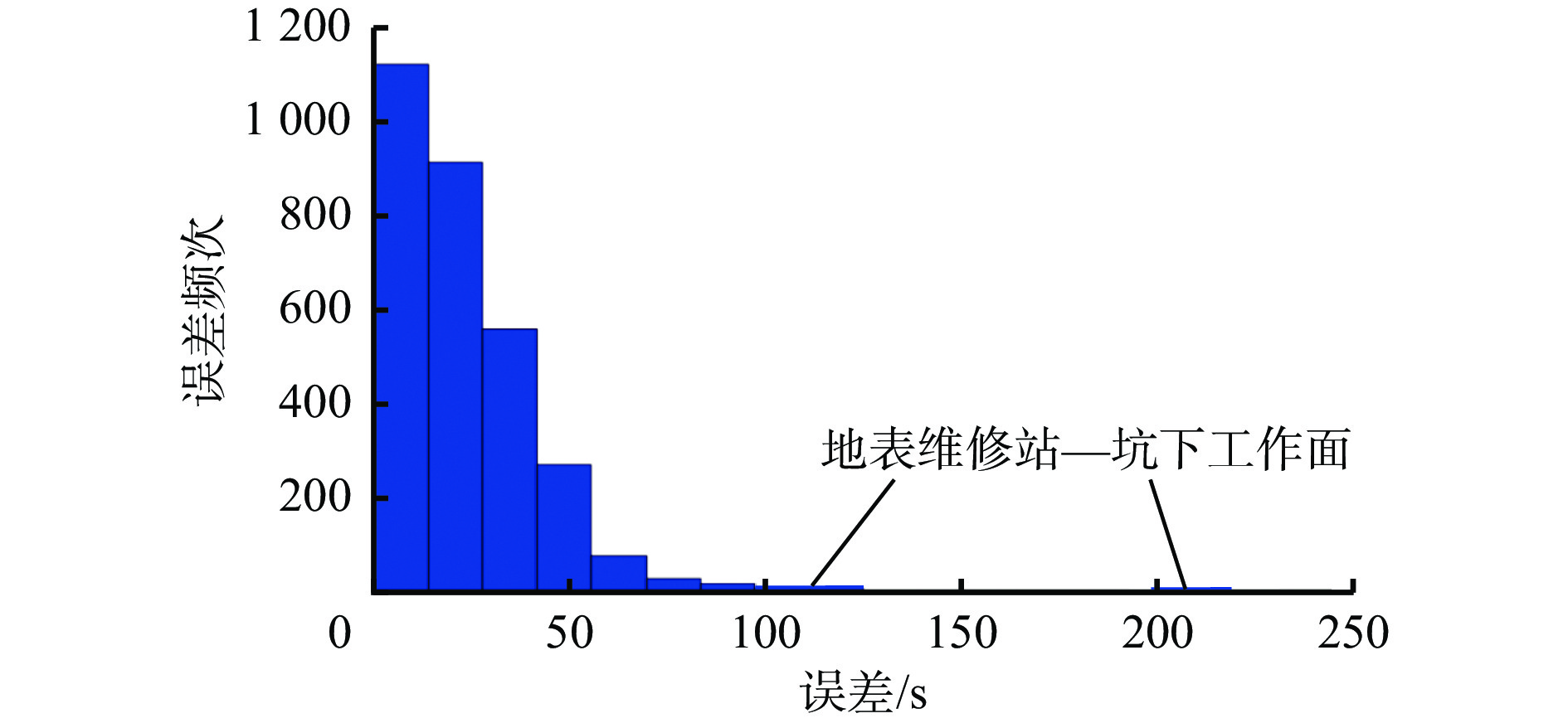
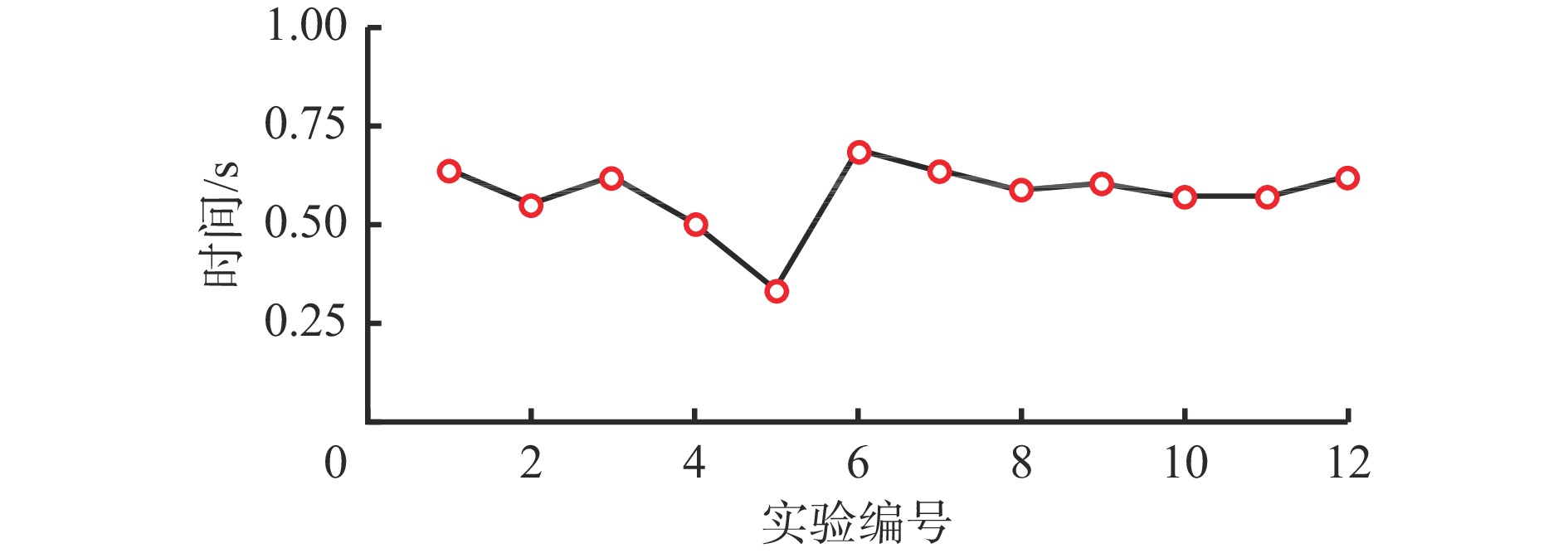
摘要: 受限于露天矿道路的复杂性,现有的卡车行程时间预测方法在实际部署中存在困难,导致卡车优化调度系统只实现调度而非优化。提出了一种基于速度场的露天矿卡车多路段行程时间组合预测模型。将露天矿道路划分为多个路段,采用随机森林算法构建单元预测模型,预测卡车在每一路段的行驶时间,再对各...
2022, 48(6): 100-111.
DOI: 10.13272/j.issn.1671-251x.2022030051
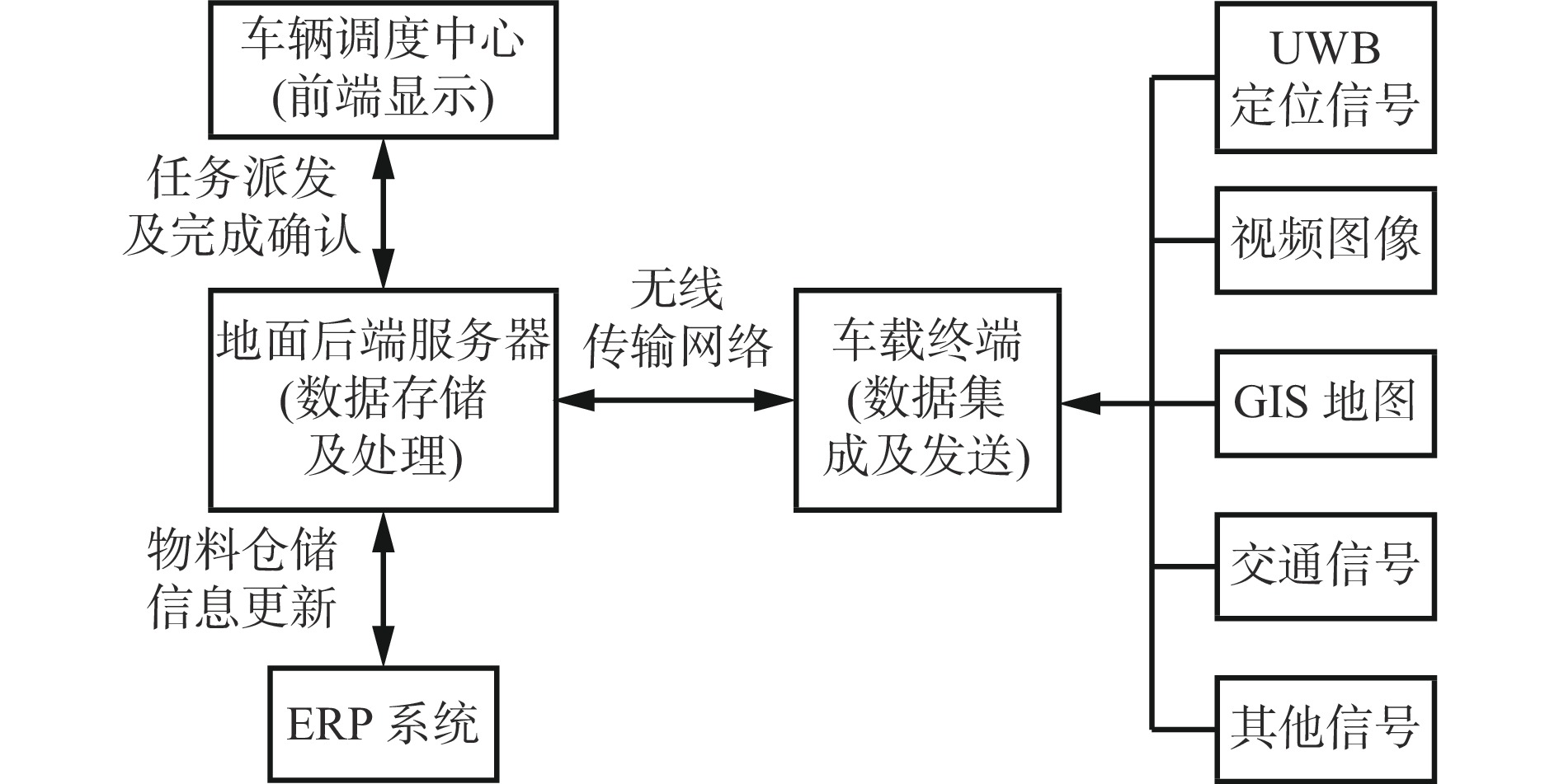
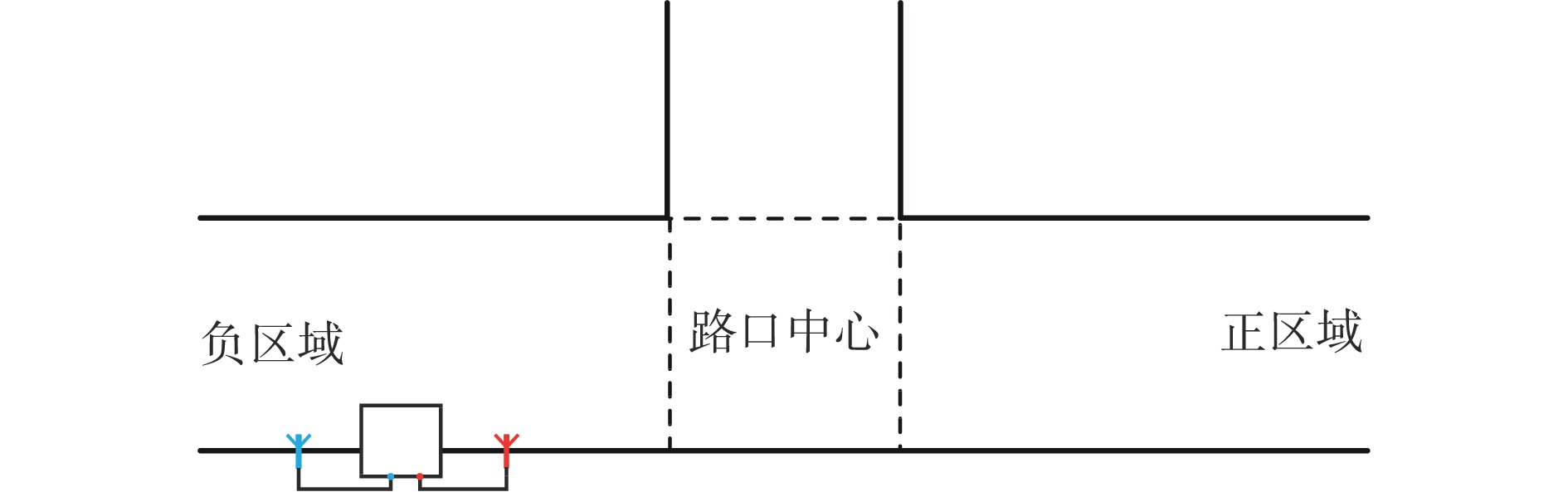
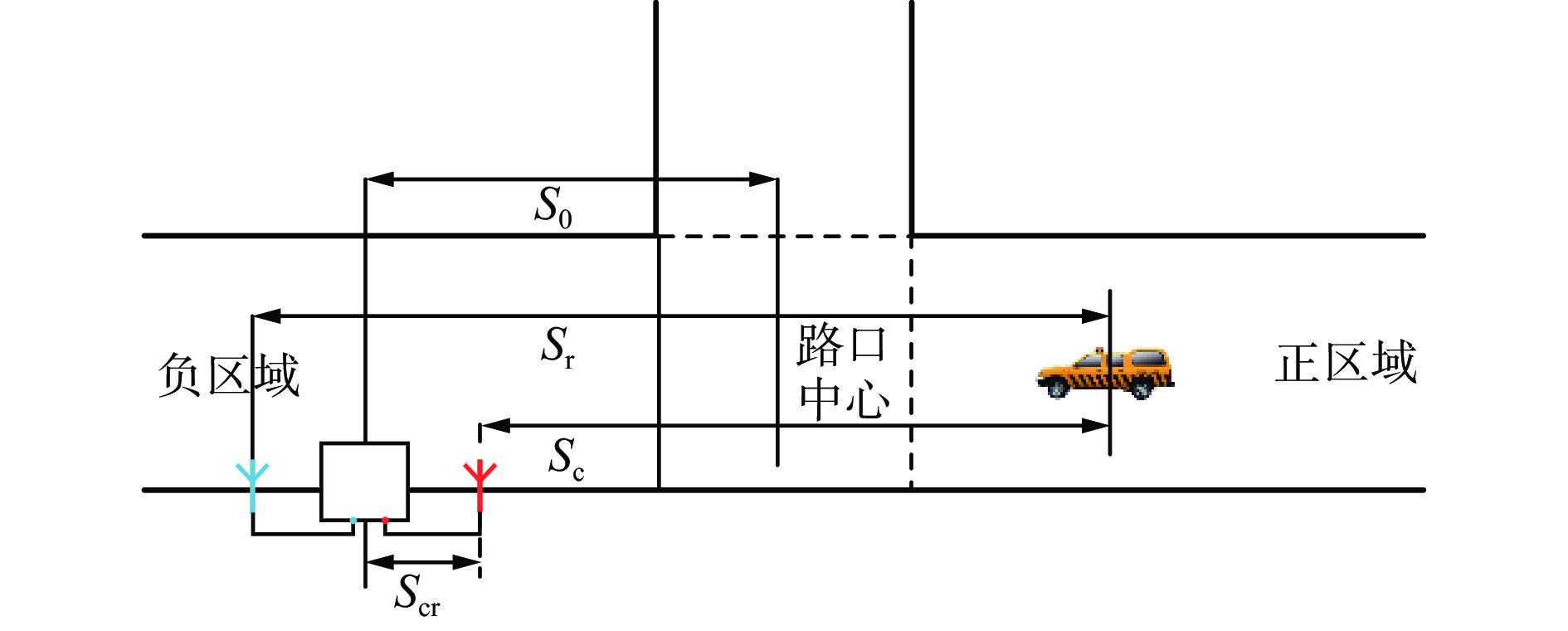
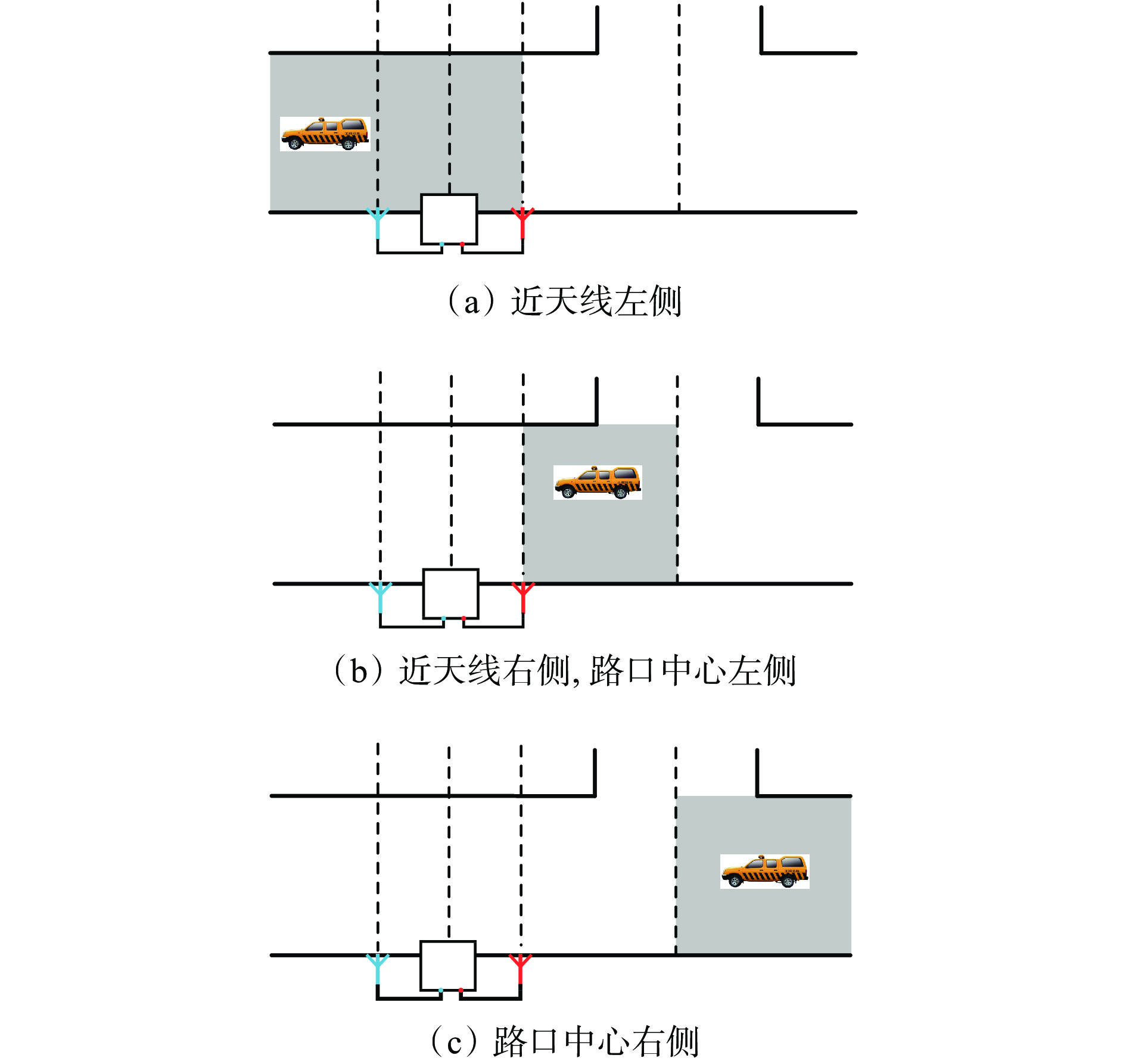
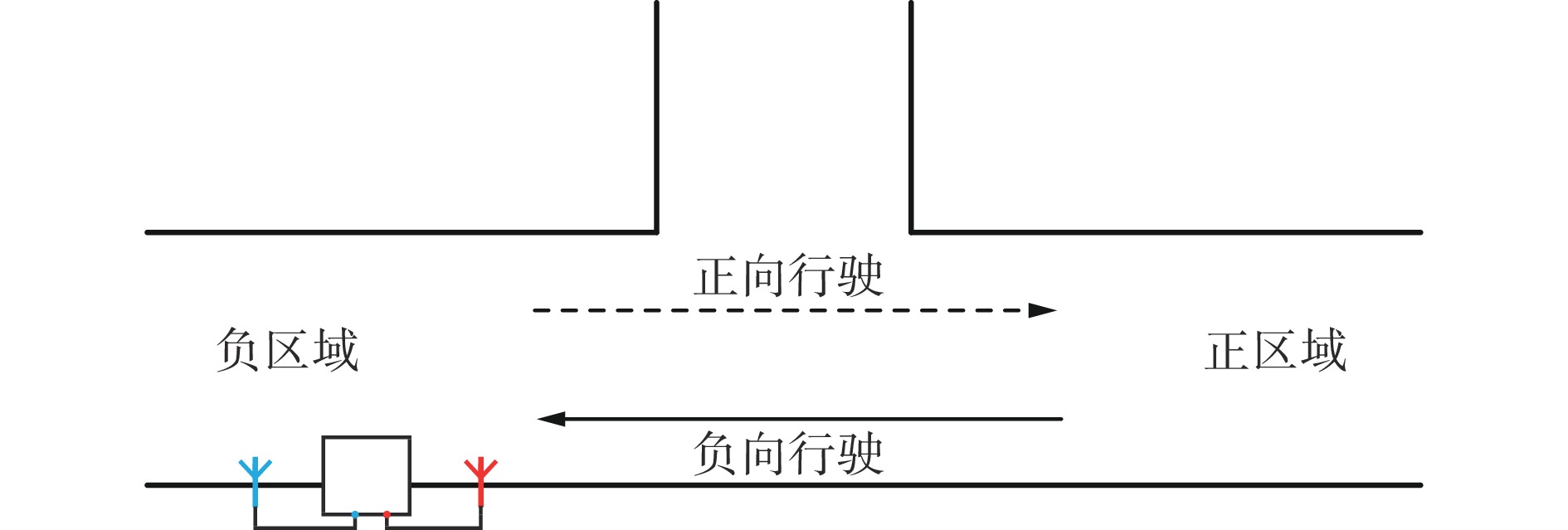
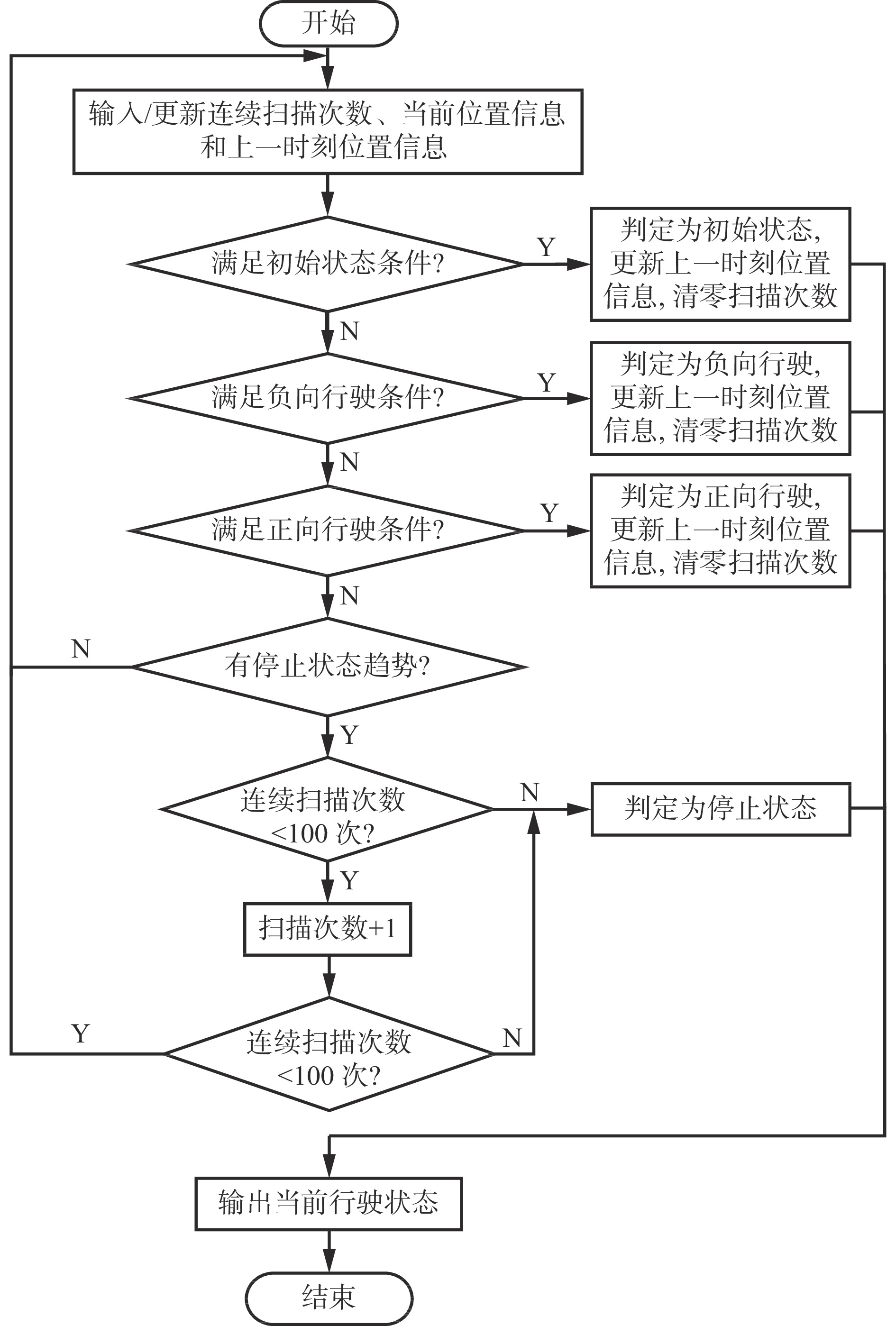
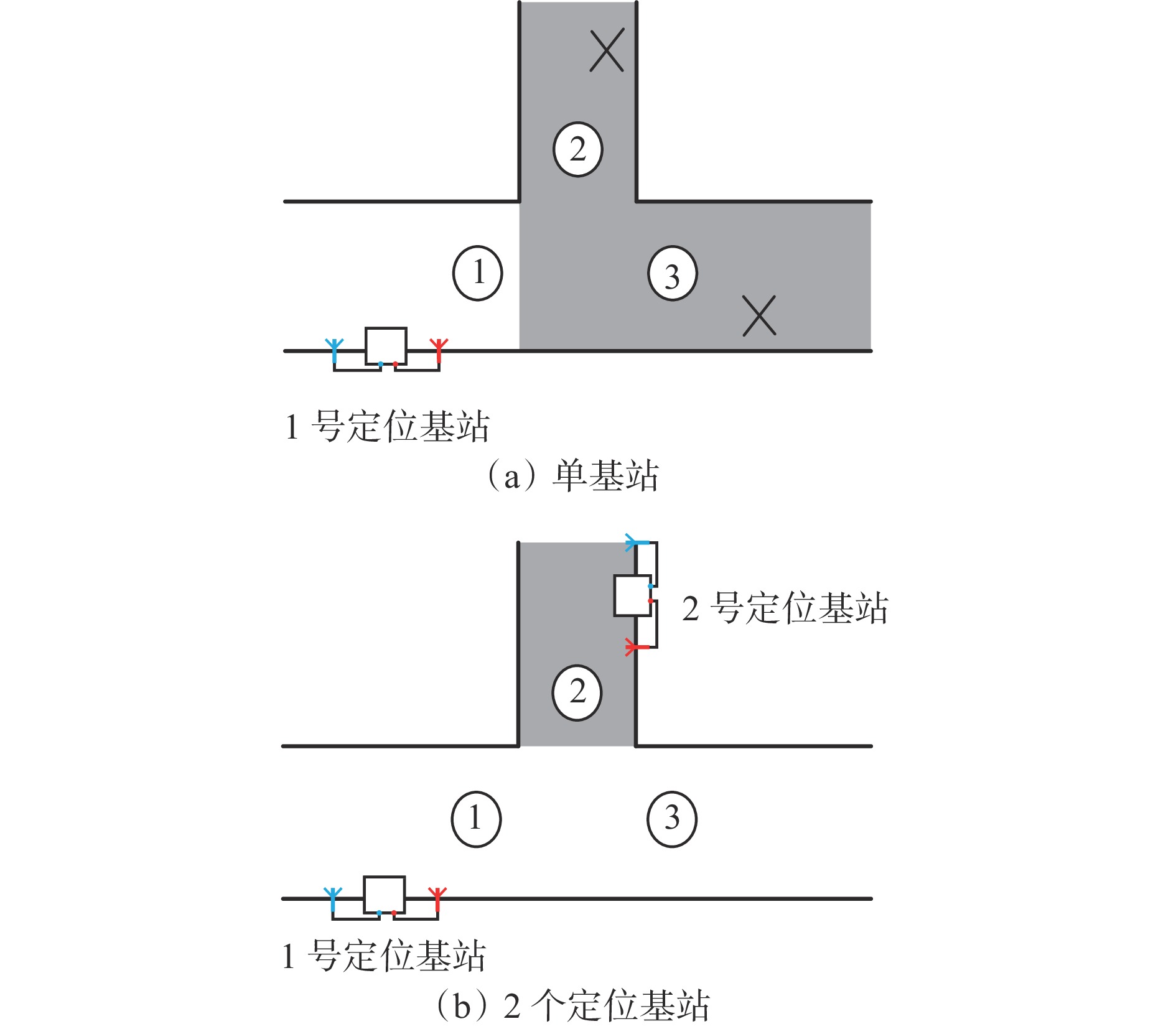
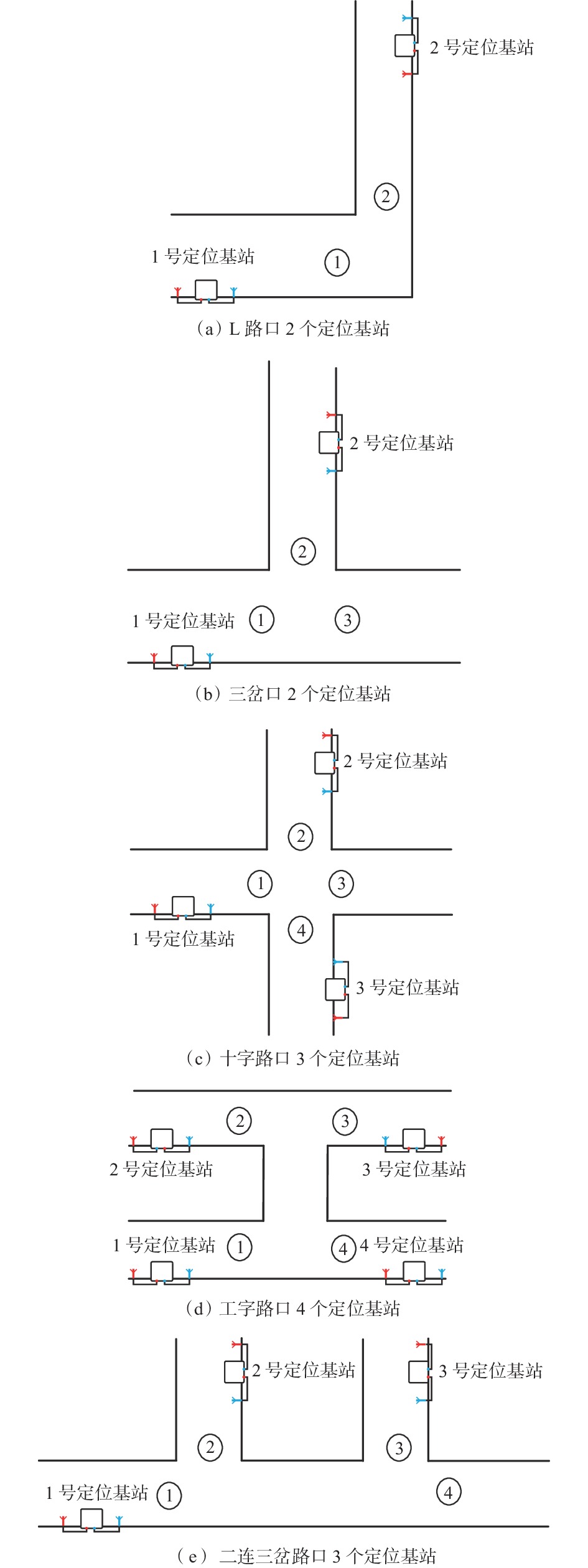
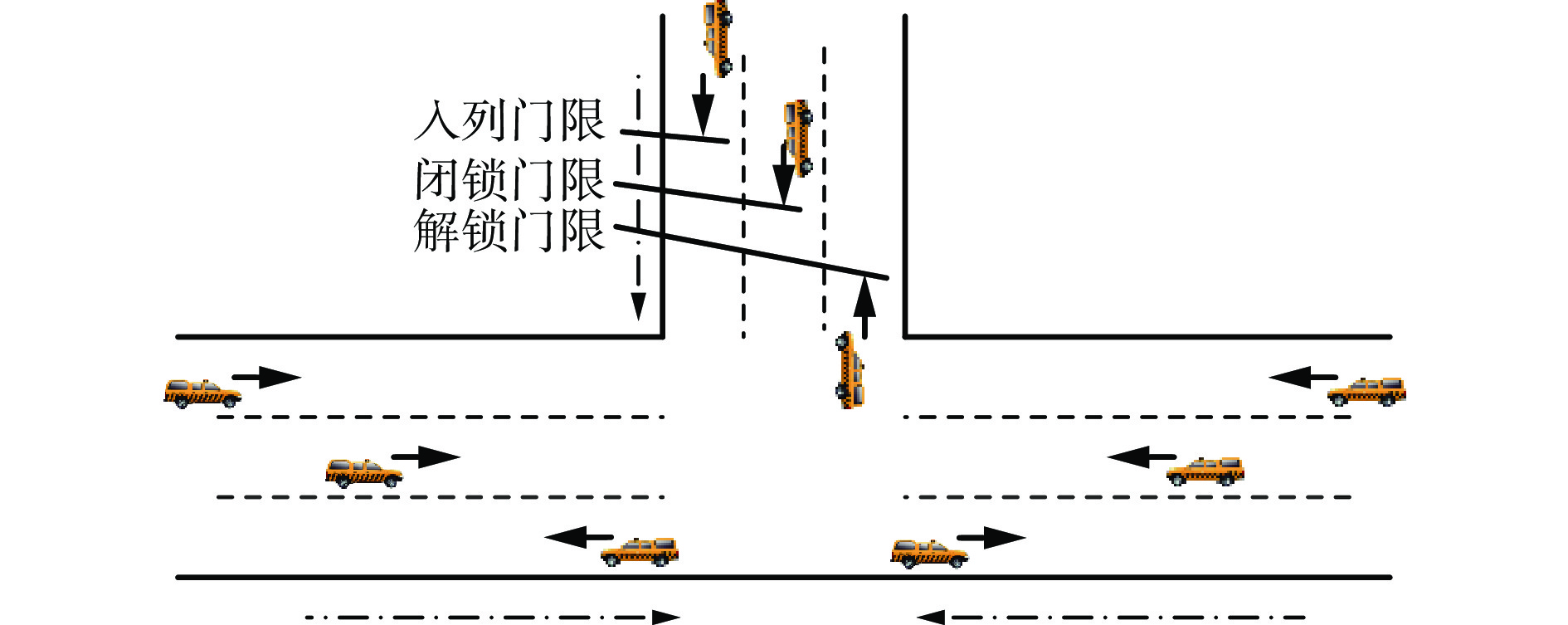
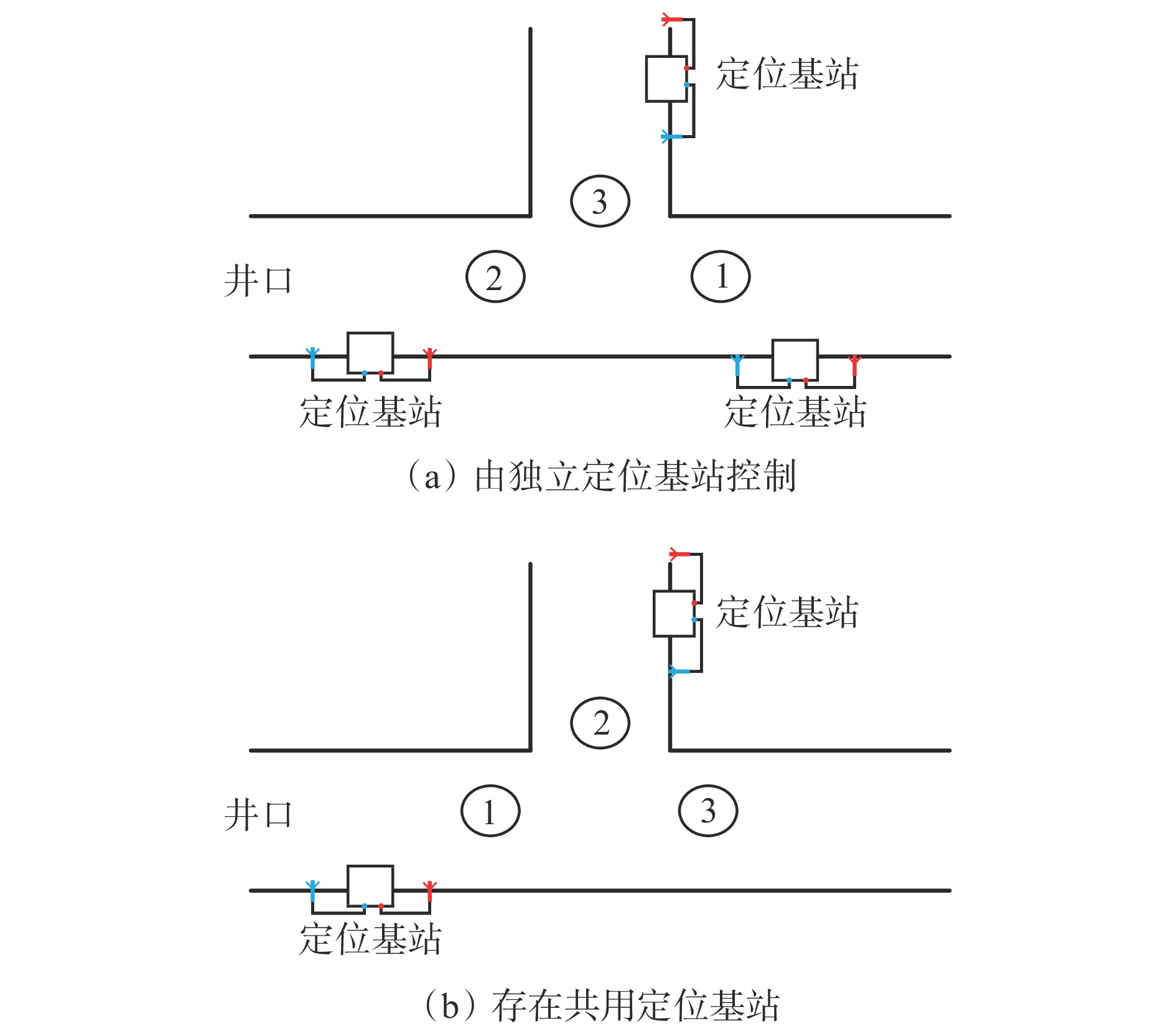
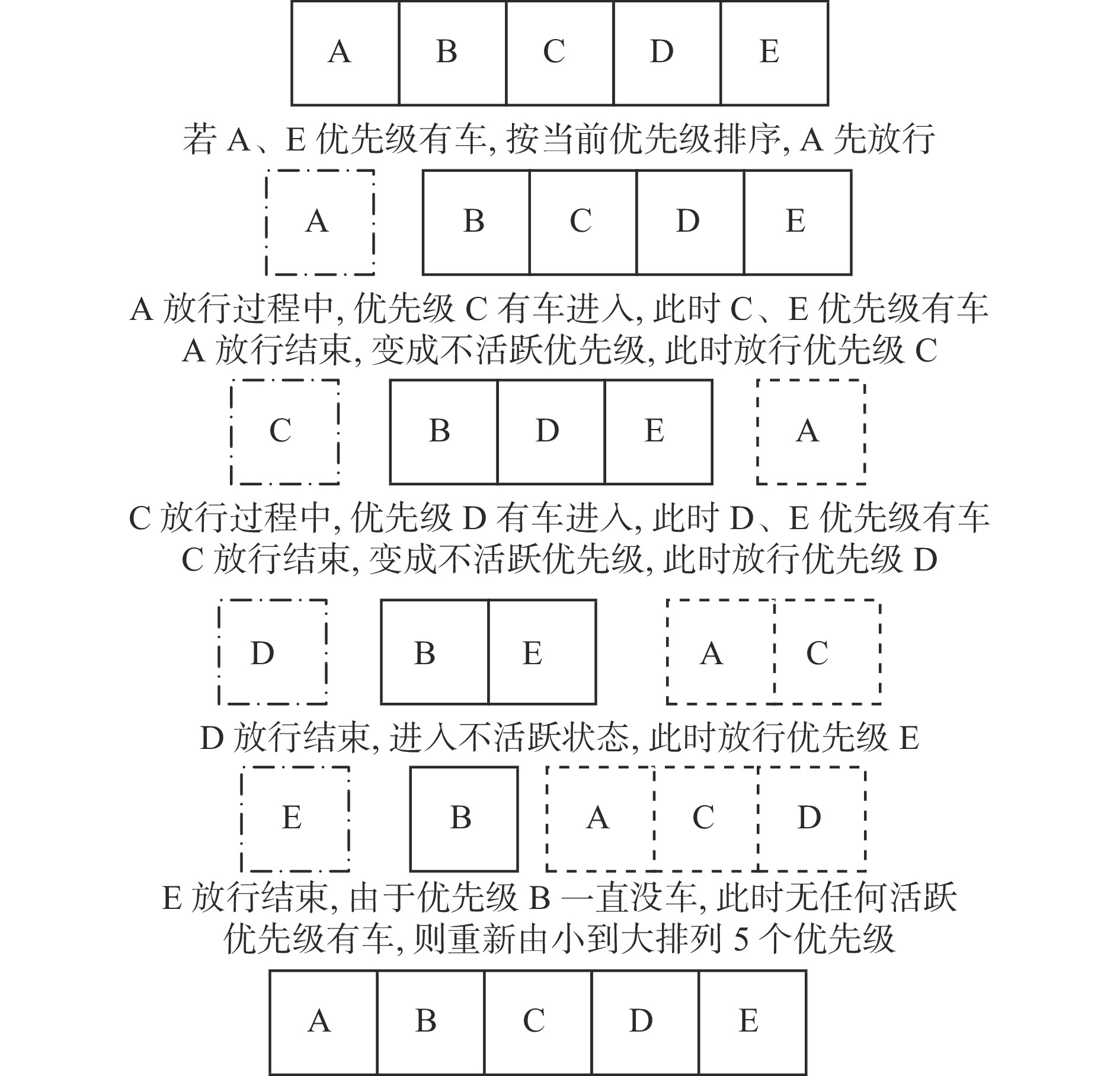
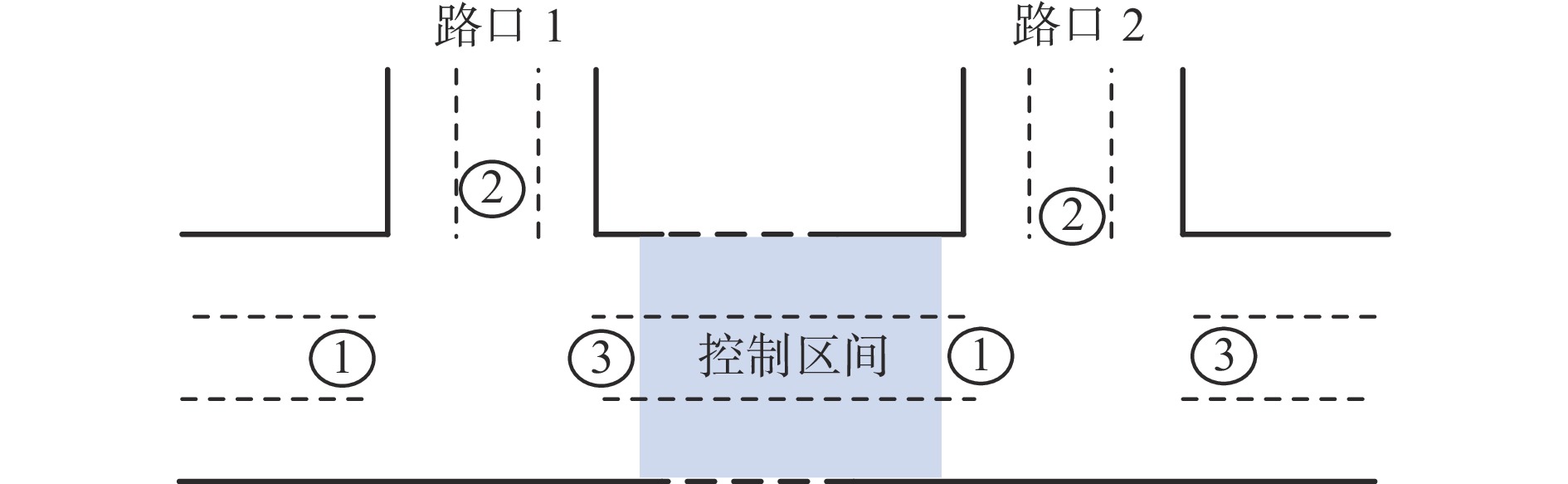
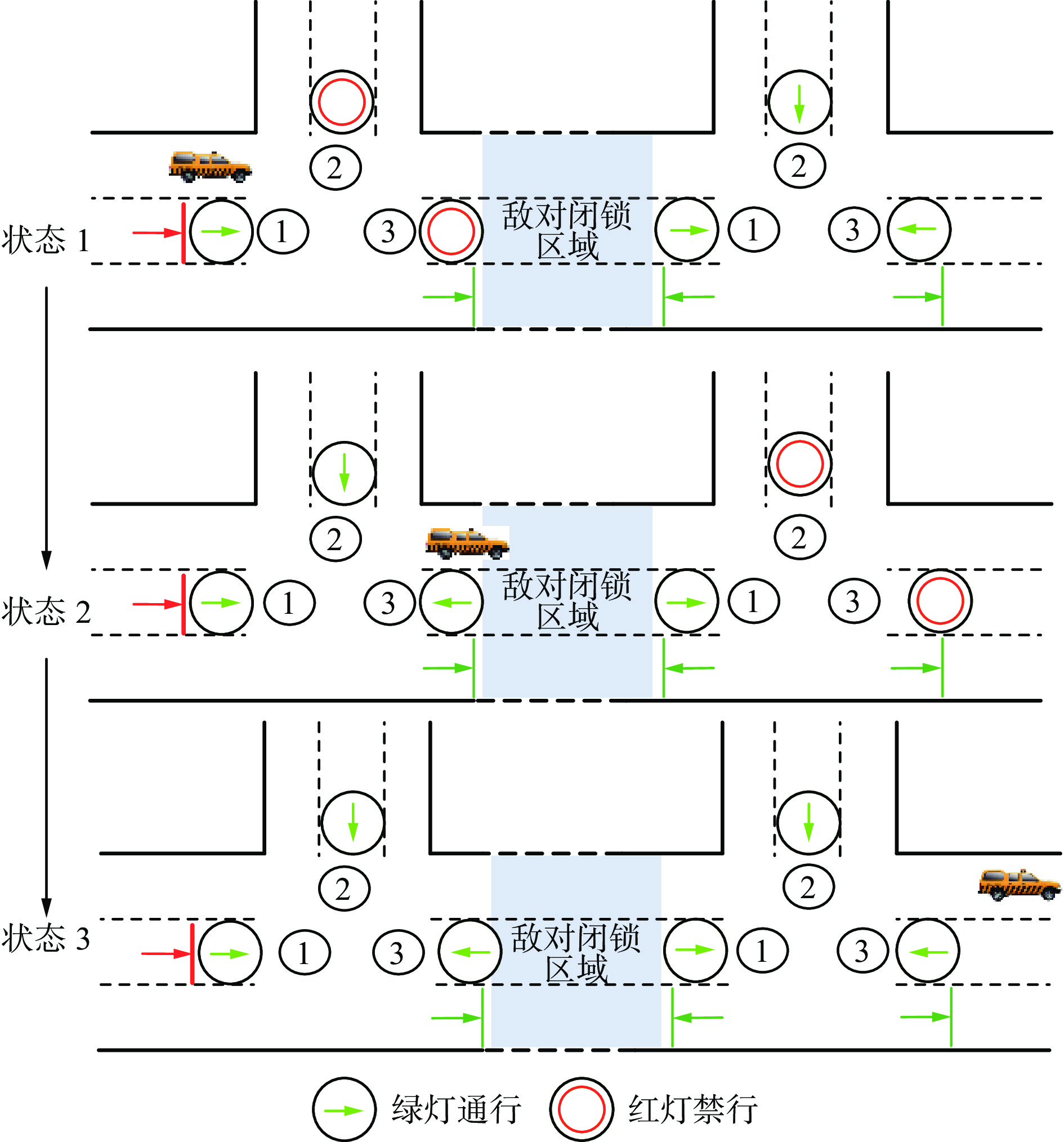
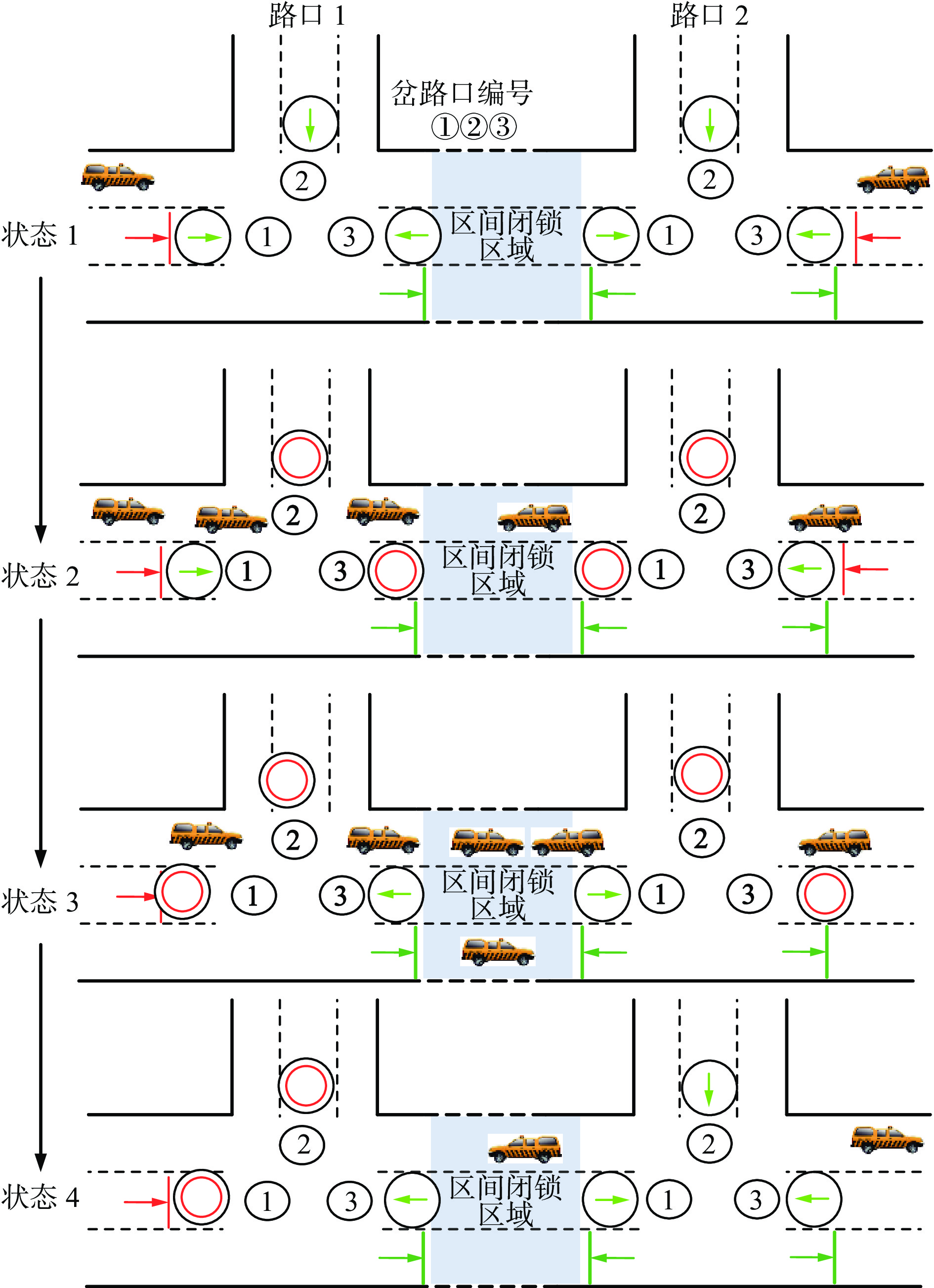
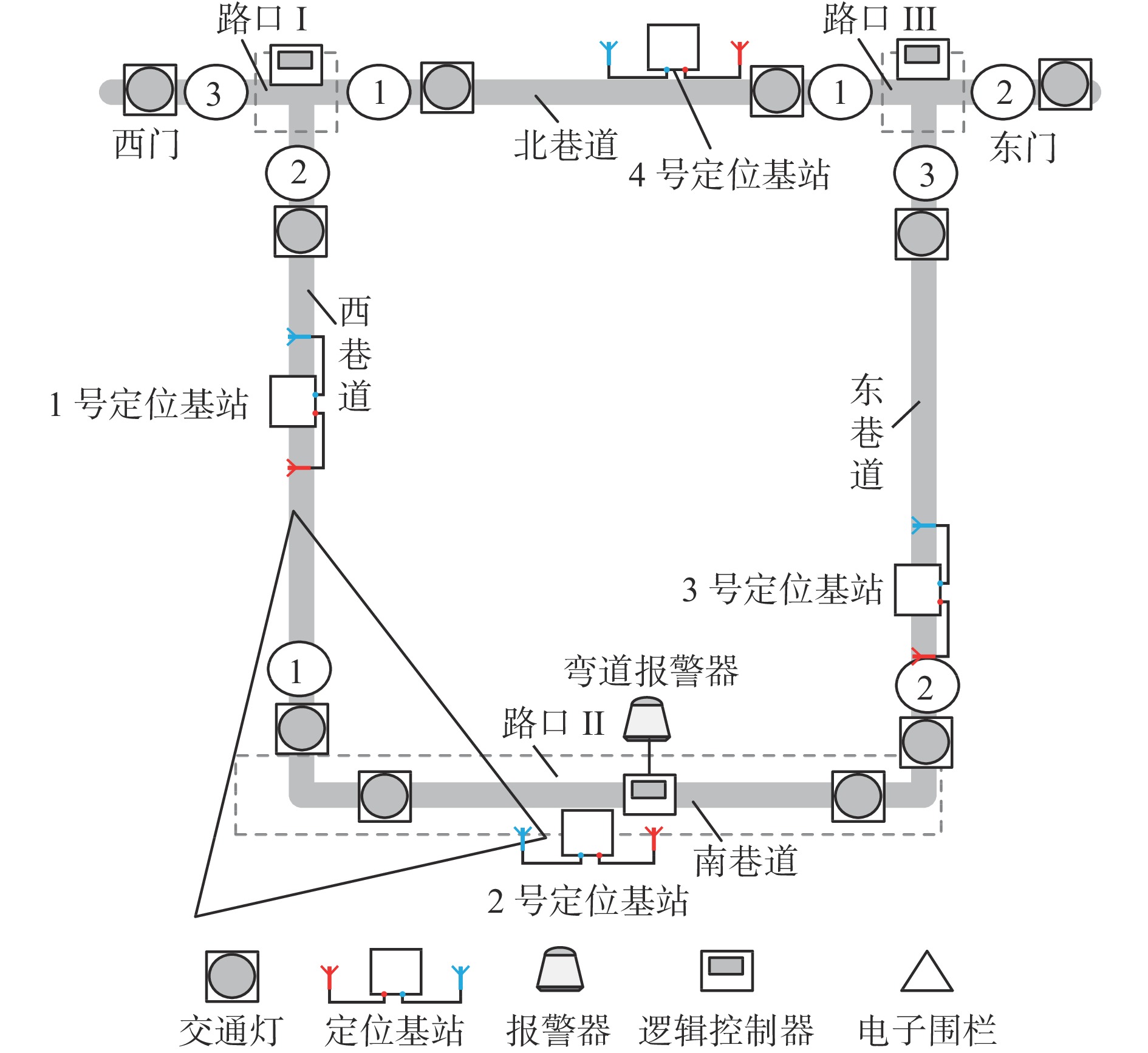
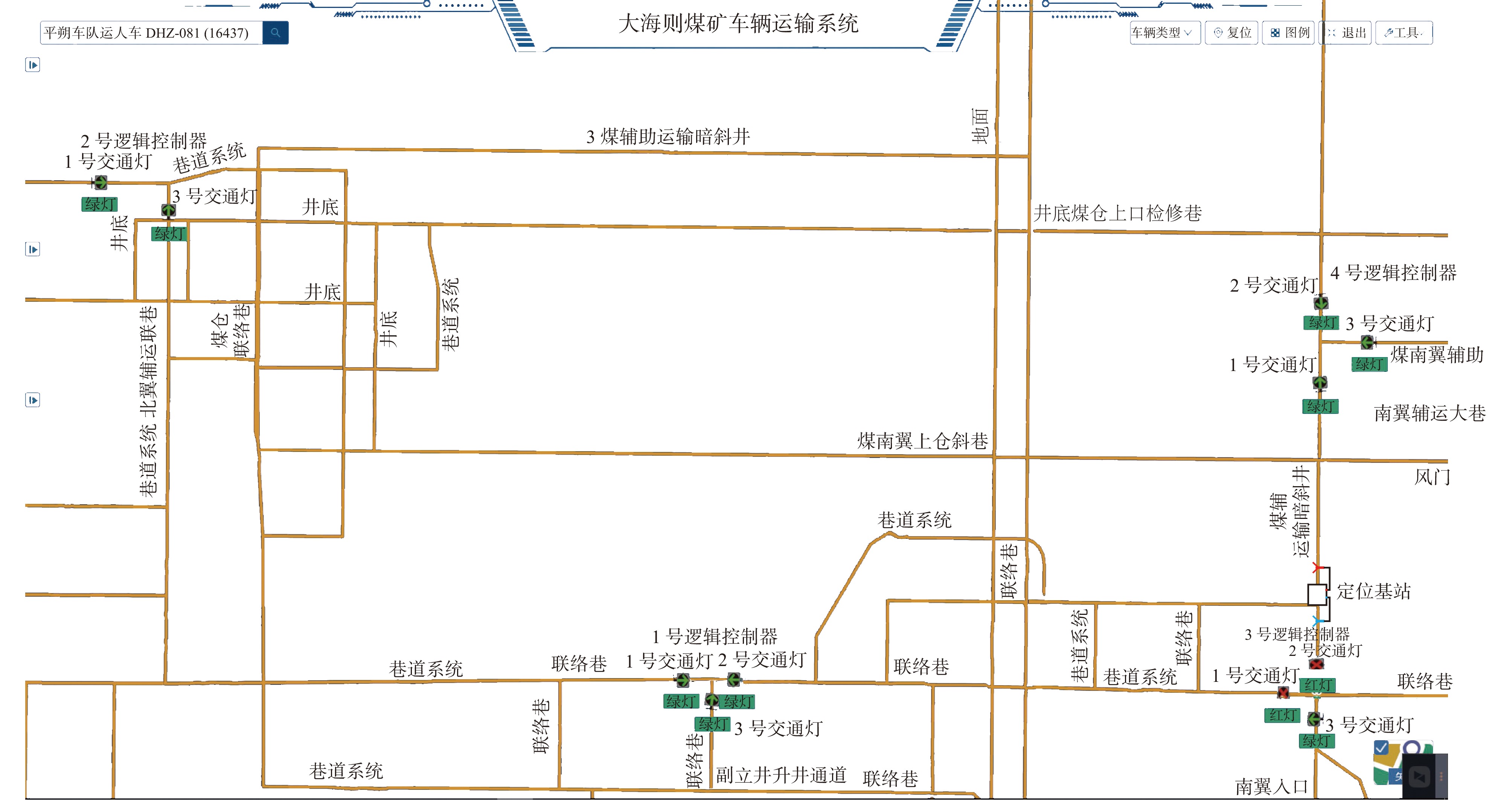
摘要: 针对当前辅助运输系统缺少有效的控制策略,车辆在路口盲区候车无序、错车困难,易发生碰撞事故,导致运输效率低的问题,设计了一种基于UWB精确定位的辅助运输交通灯自动控制系统。该系统确定了UWB定位基站在典型路口处的分布要求,设置了位置信息和行驶状态2个控制参数、多种放行机制和...


- 上一个专辑:“煤炭智能分选技术与应用” 专题征稿
- 下一个专辑:“煤炭安全智能精准开采”专题


