
Current status and development trend of intelligent technology of underground coal mine transportation system
-
摘要: 井工煤矿运输系统按运输对象不同可分为主运输系统和辅助运输系统。阐述了我国井工煤矿主运输系统和辅助运输系统底层装备和系统智能化技术现状,从顶层规划和标准体系、单机智能化等方面分析了主运输系统和辅助运输系统智能化技术存在的问题。重点介绍了3种主运输系统智能化关键技术,包括基于全数字化的FCS(现场总线控制系统)分布式带式输送机通信控制技术、基于机器音视觉的多传感融合增强型带式输送机保护技术、煤流线协同经济运行控制技术,以及2种辅助运输系统智能化关键技术,包括基于工业互联网架构的煤矿井下辅助运输管控一体化技术、煤矿井下车联网及无人驾驶技术。结合《煤矿智能化建设指南(2021年版)》对智能主煤流运输系统和智能辅助运输系统的要求,从近期和中远期阐述了井工煤矿主运输系统和辅助运输系统智能化发展趋势及目标。提出现阶段我国井工煤矿主运输系统应重点研究基于机器音视觉多传感融合的带式输送机增强型保护和检测技术、智能巡检机器人技术等,辅助运输系统应重点研究精细化闭环管控和高级辅助驾驶技术。Abstract: The underground coal mine transportation system can be divided into the main transportation system and the auxiliary transportation system according to the different transportation objects. This paper expounds the status of the bottom equipment and system intelligent technology of the main and auxiliary transportation systems in the underground coal mine in China. This study also analyzes the problems existing in the intelligent technology of the main and auxiliary transportation systems from the aspect of the top planning, standard system and single machine intelligent technology. The three key technologies of intelligent main transportation system are introduced, including distributed communication control technology of belt conveyor based on full digital FCS (fieldbus control system), enhanced protection technology of belt conveyor based on multi-sensor fusion of machine audio and vision, and coordinate economic operation control technology of coal flow. The two key technologies of intelligent auxiliary transportation system are also introduced, including management and control integration technology of underground coal mine auxiliary transportation based on industrial Internet architecture, vehicle-to-everything and unmanned driving technology in underground coal mine. Combined with the requirements of Coal mine intelligent construction guide (2021 edition) for intelligent main coal flow transportation system and intelligent auxiliary transportation system, this paper expounds the intelligent development trend and goal of main transportation system and auxiliary transportation system of underground coal mine from the short term and medium and long term. At present, the research of the main transportation system of underground coal mine in China should focus on the enhanced protection and detection technology of belt conveyor based on multi-sensor fusion of machine audio and vision, intelligent inspection robot technology, etc. And the research of the auxiliary transportation system should focus on the fine closed-loop control and advanced auxiliary driving technologies.
-
0. 引言
近年来综掘技术快速发展,机械化程度逐步提高,掘进速度加快,综掘工作面产尘量随之增加[1-3],不仅加大了综掘工作面的粉尘治理难度,也严重危害井下作业人员的职业健康。现阶段国内外综掘工作面粉尘防治手段有通风除尘、喷雾降尘、泡沫降尘等[4-6]。对于通风除尘技术,压抽混合式通风虽能将大量含尘气流吸入除尘设备并净化,但未被除尘设备及时抽离的含尘气流会从巷道回风侧向综掘机后方作业区域扩散[7],导致降尘效果不理想。
为进一步改善综掘工作面环境,国内外学者提出了压风分流技术[8],通过附壁风筒径向风流在综掘工作面前端形成一道风幕屏障,以阻控粉尘在巷道内扩散,并利用除尘设备进行高效抽尘净化,以解决综掘工作面粉尘污染问题。聂文等[9]通过数值模拟和工程应用方法,研究得出压风气幕的形成取决于压风距离,并确定了高浓度粉尘扩散距离与压风距离之间的数学关系式。Liu Qiang等[10]分析了附壁风筒安装位置对粉尘扩散的影响,得出附壁风筒与综掘工作面距离为25 m时,风幕阻尘性能最佳。陈芳等[11]研究了附壁风筒轴径向出风比对控尘效果的影响,结果表明,当轴径向出风比为1∶3时,风幕控尘效果最好。王建国等[12]利用Fluent进行数值模拟,分析附壁风筒条缝参数对综掘工作面控尘效果的影响,得到了控制综掘工作面粉尘扩散的最佳条缝参数。王昊等[13]发现压抽风量比越小,越有利于形成分布较为均匀的阻尘风幕,并通过现场实测验证了数值模拟的有效性。
以上成果在一定程度上推动了风幕阻尘的研究进程。然而,目前的研究多集中于单一因素对综掘工作面风幕阻尘效果的影响,而未充分考虑各因素间的交互作用,使得压风分流技术的工程应用效果欠佳。为此,本文以淮南矿业(集团)有限责任公司潘集第三煤矿(简称潘三矿)810西翼机巷综掘工作面为研究对象,通过数值模拟技术,对比分析附壁风筒径向出风距离和径向出风比(径向出风量与压风总量之比)、轴向出风距离对风流运移及粉尘分布规律的影响,得出不同径向出风距离下粉尘扩散距离随径向出风比变化的数学关系式,获得最佳风幕阻尘工艺参数,并采用现场实测的方法,验证数值模拟的有效性,为压风分流风幕阻尘技术的应用提供理论指导。
1. 数学模型的建立
巷道内粉尘扩散属于多相流运动,在研究粉尘运移规律时,常采用气−固两相流数学模型[14],将风流视为连续相,粉尘颗粒视为离散相。
1.1 风流运动方程
巷道内风幕运移属于附壁射流和强旋流形成的复合湍流流场[15],Reynolds平均法是目前应用最为广泛的湍流数值模拟方法,Realizable $ k - \varepsilon $湍流模型对于附壁射流和强旋流具有很好的表现[16],因此选用该模型开展风流场的数值模拟。
$ k $方程−湍流动能方程和$ \varepsilon $方程−湍流动能耗散率方程分别为
$$ \frac{\partial(\rho k)}{\partial t}+\frac{\partial(\rho u_i)}{\partial w_i}=\frac{\partial}{\partial w_j}\left[\left(\mu+\frac{\mu_{\mathrm{t}}}{\sigma_k}\right)\frac{\partial k}{\partial w_j}\right]+G_k-\rho\varepsilon $$ (1) $$ \begin{split} & \frac{\partial(\rho\varepsilon)}{\partial t}+\frac{\partial(\rho\varepsilon u_i)}{\partial w_i}=\frac{\partial}{\partial w_j}\left[\left(\mu+\frac{\mu_{\mathrm{t}}}{\sigma_{\varepsilon}}\right)\frac{\partial\varepsilon}{\partial w_j}\right]+ \\ & \qquad\frac{1}{\sqrt{2}}\rho c_1\varepsilon\left(\frac{\partial u_j}{\partial w_i}+\frac{\partial u_i}{\partial w_j}\right)-\rho c_2\frac{\varepsilon^2}{k+\sqrt{\nu\varepsilon}} \end{split} \qquad\qquad\; \, $$ (2) 式中:$ \rho $为空气密度;$ k $为湍流动能;$ t $为时间;$ u_i,u_j $分别为$ i,j $(i,j分别为x,y,z 3个方向)方向的时均速度;$ (w_i,w_j) $为流场中任意一点在各自方向上的坐标位置;$ \mu $为流体黏度;$ \mu_{\mathrm{ }}t $为流体湍动黏度;$ \sigma_ k,\sigma_ \varepsilon $分别为$ k $方程和$ \varepsilon $方程的紊流普朗特数;$ G_k $为由平均运动速度梯度引起的紊流动能生成项;$ \varepsilon $为湍流动能耗散率;$ c_1, c_2 $为常数,c1=1.4,c2=1.9;$ \nu $为平均速度。
1.2 粉尘颗粒受力方程
在计算粉尘颗粒运移时,Fluent是通过积分拉格朗日坐标系下粒子间相互作用的微分方程来求解离散相颗粒扩散轨迹[17]。在风流作用下,巷道内粉尘颗粒主要受到重力、浮力、曳力及萨夫曼升力的影响[18-20],粉尘颗粒受力方程为
$$ \frac{{{\mathrm{d}}u_{\mathrm{p}}}}{{{\mathrm{d}}t}} = F_{\mathrm{D}}(u - u_{\mathrm{p}}) + g\frac{{\rho_ {\mathrm{p}} - \rho }}{{\rho_ {\mathrm{p}}}} + F_{\mathrm{S}} $$ (3) $$ F_{\mathrm{D}} = \frac{{18\mu }}{{\rho_ {\mathrm{p}} d_{\mathrm{p}}^2}}\frac{{C_{\mathrm{D}}{\text{Re}}}}{{24}} $$ (4) 式中:$ u_{\mathrm{p}} $为颗粒速度;$ F_{\mathrm{D}} $为曳力;$ u $为流体速度;$ g $为重力加速度;$ \rho_ {\mathrm{p}} $为颗粒密度;$ F_{\mathrm{S}} $为萨夫曼升力;$ d_{\mathrm{p}} $为颗粒直径;$ C_{\mathrm{D}} $为曳力系数;Re为雷诺数。
2. 几何模型的构建及参数设置
2.1 模型构建
潘三矿810西翼机巷为岩石巷道,综掘巷道内设有综掘机、转载机、带式输送机、供风装置、除尘设备等,现场情况复杂,故对综掘工作面的几何模型进行适当简化。利用Design Modeler建模软件构建810西翼机巷综掘工作面等比例几何模型,如图1所示,其中Q1为压风总量,Q2为吸风量,Qr为径向出风量,Qa为轴向出风量,Qc为循环风量,Lr为径向出风距离,La为轴向出风距离。附壁风筒出风条缝如图2所示。
自综掘工作面起取60 m长巷道作为计算区域,巷道宽5.6 m,高4.4 m,巷道断面为直墙半圆拱结构,正压风筒、附壁风筒、整流风筒及负压风筒直径均为0.8 m,风筒中轴线距巷道底板2.5 m,负压风筒吸尘口距综掘工作面4.3 m。附壁风筒筒体开有2类出风方向不同的径向条缝:一类是将附壁风筒半圆筒体按60°划分为3等份,开有上、下2条出风条缝,另一类是将附壁风筒半圆筒体按36°划分为5等份,开有上、中、下3条出风条缝。每类径向出风条缝有5组,条缝宽度均为0.05 m,且2类径向出风条缝交替布置,条缝之间间隔为0.05 m。
2.2 边界条件及参数设置
810西翼机巷综掘工作面基本边界条件设置:风筒出风口及吸尘口边界为Velocity Inlet,巷道出口边界为Outflow,综掘工作面为Dust Source,其他边界均为Standard Wall,湍流动能为0.8 m2/s2,湍流动能耗散率为0.8 m2/s3。
现已测定810西翼机巷综掘工作面压风总量为300 m3/min,吸风量为400 m3/min。颗粒粒径遵循Rosin−Rammler分布,以3.5 g/s质量流率从综掘工作面喷射,数值模拟中尘源颗粒主要参数设置:最小粒径为0.58 μm,最大粒径为21.8 μm,中位粒径为4.32 μm,颗粒分布指数为1.78,粉尘材料密度为2.6 g/cm3。离散相壁面边界条件设置:巷道出口为Escape,巷道底板及吸尘口为Trap,其他壁面为Reflect。
3. 数值模拟结果分析
综掘机在截割岩体时的产尘量占综掘工作面总产尘量的80%~95%[21-22],是综掘工作面第一产尘源。因此,在进行数值模拟时,为更好地研究阻尘风幕对综掘机前端粉尘的阻控效果,不考虑其他产尘源。
3.1 径向出风距离对风流分布的影响
当径向出风比φ=0.9,轴向出风距离La=8 m时,数值模拟径向出风距离Lr分别取10,15,20,25 m工况下的风流分布情况。综掘工作面主要作业人员为综掘机司机,其位置距离工作面约7 m,呼吸带高度约为2.1 m。对不同工况下各断面内风幕形态进行对比分析,结果如图3所示。
![]() 图 3 不同Lr条件下各断面内风速矢量分布Figure 3. Wind speed vector distribution in each section under different radial air outlet distances Lr conditions
图 3 不同Lr条件下各断面内风速矢量分布Figure 3. Wind speed vector distribution in each section under different radial air outlet distances Lr conditions由图3可看出,附壁风筒将压风风流分为径向风流和轴向风流,径向风流在巷道壁面阻挡和附壁效应的作用下沿巷道壁面做环绕运动,形成径向涡流风幕,且径向涡流风幕在吸尘口抽风负压的作用下不断向工作面方向运移,在运移过程中,其涡流特性沿程不断衰减,风流速度方向逐步由径向转为轴向,综掘作业区域风流分布趋于均匀,形成了轴向阻尘风幕[23-24]。径向出风距离Lr越大,径向涡流风幕在巷道内的转变越充分,综掘机司机前端的风流分布越均匀,越有利于形成风速方向均指向工作面的轴向阻尘风幕。当Lr=10 m时,距工作面7 m断面内涡流特性明显,风速方向紊乱。当Lr=25 m时,距工作面7 m断面内风流分布趋于均匀,风速方向均指向工作面,形成了能够覆盖全断面的轴向阻尘风幕。
3.2 径向出风比对风流分布的影响
研究径向出风比φ对风流分布的影响时,设置径向出风距离Lr=20 m,轴向出风距离La=8 m,φ分别为0.6,0.7,0.8,0.9时综掘工作面风流分布如图4所示。
![]() 图 4 不同φ条件下综掘工作面风流分布Figure 4. Air flow distribution of excavation face under different ratios of radial air outlet φ conditions
图 4 不同φ条件下综掘工作面风流分布Figure 4. Air flow distribution of excavation face under different ratios of radial air outlet φ conditions由图4可看出,随着径向出风比φ增大,整流风筒轴向风流风量减小,轴向风流风速和射流强度降低,轴向风流对综掘工作面前端气流的扰动减弱;φ越大,越有利于形成风流方向指向工作面且能覆盖全断面的轴向阻尘流场,即轴向阻尘风幕,在φ增大过程中,所形成的轴向阻尘流场的宽度不断增大,由φ=0.6时的0.9 m增大至φ=0.9的3.4 m,轴向阻尘流场右边界与综掘工作面的距离不断减小,由φ=0.6时的9.4 m减小至φ=0.9时的6.4 m。
3.3 径向出风距离及出风比对粉尘扩散的影响
由于径向出风距离Lr和径向出风比φ在实际生产过程中会对粉尘扩散产生交互影响,为了考虑各参数对粉尘扩散的综合影响,进而得到最佳的参数匹配,对轴向出风距离La=8 m,径向出风距离Lr分别为10,15,20,25 m,径向出风比φ分别为0.6,0.7,0.8,0.9时的粉尘运移扩散情况进行对比分析。部分Lr及φ条件下综掘机司机呼吸带处粉尘质量浓度分布如图5所示,不同Lr及φ条件下粉尘扩散距离Ld见表1,不同Lr条件下φ与Ld间的拟合曲线及拟合公式如图6所示。
![]() 图 5 不同Lr及φ条件下综掘机司机呼吸带处粉尘质量浓度分布Figure 5. Distribution of dust mass concentration in the breathing zone of excavator driver under different Lr and φ conditions表 1 不同Lr及φ条件下粉尘扩散距离LdTable 1. Dust diffusion distance Ld under different Lr and φ condition
图 5 不同Lr及φ条件下综掘机司机呼吸带处粉尘质量浓度分布Figure 5. Distribution of dust mass concentration in the breathing zone of excavator driver under different Lr and φ conditions表 1 不同Lr及φ条件下粉尘扩散距离LdTable 1. Dust diffusion distance Ld under different Lr and φ conditionLr/m Ld/m φ=0.6 φ=0.7 φ=0.8 φ=0.9 10 9.1 8.9 9.8 10.5 15 8.3 7.4 7.1 8.2 20 9.4 8.1 7.0 6.4 25 12.7 11.6 10.1 6.8 ![]() 图 6 不同Lr条件下φ与Ld之间拟合曲线及拟合公式Figure 6. The fitting curve and formula between φ and Ld under different Lr conditions
图 6 不同Lr条件下φ与Ld之间拟合曲线及拟合公式Figure 6. The fitting curve and formula between φ and Ld under different Lr conditions由图5、图6及表1可看出:① 径向涡流风幕的阻尘能力随着φ增大先增强后减弱,如Lr=10,15 m时,工作面内均存在径向涡流风幕,当Lr=10 m时,Ld由φ=0.6时的9.1 m先减小为φ=0.7时的8.9 m,再增大为φ=0.9时的10.5 m;当Lr=15 m时,Ld由φ=0.6时的8.3 m先减小为φ=0.8时的7.1 m,再增大为φ=0.9时的8.2 m。② 轴向阻尘风幕的阻尘能力随着φ增大而不断增强,当Lr=20 m,φ=0.6,0.7,0.8,0.9时,均在综掘工作面内形成轴向阻尘流场,即轴向阻尘风幕,同时随着φ增大,Ld不断减小。③ 当Lr=25 m,φ=0.9时,径向风流才可在综掘工作面内形成轴向阻尘风幕,此时Ld=6.8 m;当φ=0.6,0.7,0.8时,由于附壁风筒距离工作面过远,导致其径向风流到达工作面时风速过低,此时粉尘受轴向风流的影响从巷道右侧逸散。④ 当Lr=20 m,φ=0.8,0.9或Lr=25 m,φ=0.9时,在综掘工作面形成的轴向阻尘风幕均能将高浓度粉尘阻控在综掘机司机前端空间范围内,但考虑到Lr过大易导致综掘工作面压入风量不足,风速过低,选定Lr=20 m,φ=0.9为最佳工艺参数。
3.4 轴向出风距离对风流分布及粉尘扩散的影响
设置附壁风筒径向出风距离Lr=20 m,径向出风比φ=0.9,数值模拟整流风筒轴向出风距离La为6,8,10,12 m工况下的风流分布及粉尘扩散情况,确定整流风筒最佳位置。综掘机司机呼吸带处速度云图及粉尘质量浓度分布云图分别如图7、图8所示。
![]() 图 7 不同La条件下综掘机司机呼吸带处速度云图Figure 7. Speed cloud at the breathing zone of excavator driver under different axial outlet distance La conditions
图 7 不同La条件下综掘机司机呼吸带处速度云图Figure 7. Speed cloud at the breathing zone of excavator driver under different axial outlet distance La conditions![]() 图 8 不同La条件下综掘机司机呼吸带处粉尘质量浓度分布Figure 8. Distribution of dust mass concentration at the breathing zone of the driver under different La conditions
图 8 不同La条件下综掘机司机呼吸带处粉尘质量浓度分布Figure 8. Distribution of dust mass concentration at the breathing zone of the driver under different La conditions由图7可看出,当La=6 m时,轴向风流抵达综掘工作面时风速较大,对工作面前端气流的扰动较大;当La=8~12 m时,轴向风流会在吸尘口与综掘工作面之间产生一个低速涡流区,同时涡流区的面积随La增大而减小。
由图8可看出,当Lr=20 m,φ=0.9,La=6~12 m时,高浓度粉尘均被有效阻控在综掘机司机前端。当La=6 m时,由于轴向风流抵达综掘工作面时风速较大,粉尘受轴向风流的影响在巷道右侧聚集,导致粉尘无法被除尘风机及时抽离;当La=8~10 m时,在综掘机前方形成涡流区,使得大部分粉尘聚集在吸尘口附近,并被负压风筒吸入;当La=12 m时,涡流区面积变小,控尘能力再次变弱。
针对810西翼机巷综掘工作面,在采取压风分流风幕阻尘技术后,当压风总量Q1=300 m3/min,吸风量Q2=400 m3/min,附壁风筒径向出风距离Lr=20 m,径向出风比φ=0.9,整流风筒轴向出风距离La=8~10 m时,能很好地将粉尘聚集在吸尘口附近,达到高效控尘除尘的目的。
4. 现场实测
为了验证数值模拟最佳阻尘参数的有效性,对径向出风距离为20 m、径向出风比为0.9、轴向出风距离为8 m条件下,810西翼机巷综掘工作面内风速及粉尘质量浓度进行实测分析。选取距工作面5,10,20 m断面为测风断面,测风点A,B位于工作面进风侧和回风侧人员呼吸带高度(距底板高度1.5 m)处,分别距巷道左壁面0.5,5.1 m;选取距工作面3,5,7 m断面为测尘断面,测尘点C位于工作面进风侧司机呼吸带高度处,距巷道左壁面0.5 m。各断面不同测点风速与粉尘质量浓度见表2、表3。
表 2 各断面测点风速Table 2. Wind speed at measuring points of each section距工作面距离/m A点风速/(m·s−1) B点风速/(m·s−1) 实测值 模拟值 实测值 模拟值 5 0.48 0.54 0.39 0.45 10 0.43 0.51 0.36 0.43 20 1.16 1.32 0.87 0.97 表 3 各断面测点粉尘质量浓度Table 3. Dust concentration measuring value of each section距工作面距离/m 粉尘质量浓度/(mg·m−3) 3 208.8 5 63.3 7 33.6 由表2及表3可看出,各测风断面风速实测值与模拟值基本一致,相对误差较小,说明数值模拟结果较为准确。各测尘点粉尘质量浓度实测值由距工作面3 m时的208.8 mg/m3降低至距工作面5 m时的63.3 mg/m3和距工作面7 m时的33.6 mg/m3,说明高浓度粉尘在轴向阻尘风幕的作用下被有效阻控在综掘机司机前端,与数值模拟结果一致。
5. 结论
1) 在不同径向出风距离Lr情况下,综掘工作面内存在的风幕形态不同,且随着Lr及径向出风比φ增大,径向涡流风幕在巷道内向轴向阻尘风幕的转变更充分。在φ不断变大的过程中,所形成的轴向阻尘流场的宽度不断增大,轴向阻尘流场右边界与综掘工作面距离不断减小。
2) 不同的风幕形态下,风幕的阻尘能力受φ的影响不同。当Lr<20 m时,综掘工作面内存在径向涡流风幕,其阻尘能力随着φ增大先增强后减弱;当Lr=20 m时,综掘工作面内形成径向阻尘风幕,其阻尘能力随着φ增大而不断增强。
3) 当轴向出风距离La过小时,轴向风流到达综掘工作面的速度过大,会对工作面前端气流产生较大扰动,导致粉尘在巷道右侧聚集,降尘效率不佳;当La过大时,会使吸尘口正前方的涡流区面积减小,不利于粉尘积聚。根据数值模拟结论可知,当Lr=20 m,φ=0.9,La=8~10 m时,高浓度粉尘被有效阻隔在距综掘工作面6.4 m空间范围内,并在吸尘口附近聚集,810西翼机巷综掘工作面通风除尘系统降尘效果最佳。
4) 在810西翼机巷综掘工作面进行现场实测,测点风速与粉尘质量浓度实测值与模拟值基本一致,验证了数值模拟的有效性。
【编者按】煤矿智能化是煤炭工业高质量发展的核心技术支撑。运输系统作为煤矿生产的重要环节,其智能化运行对于提升煤矿安全生产水平具有重要意义。近年来,随着人工智能、工业物联网、云计算、大数据、机器人等技术的快速发展及其与现代煤炭开采深度融合,我国煤矿运输智能化技术取得了一系列研究成果,但总的来看,智能运输技术在煤矿企业的应用尚未普及,在关键技术、工程应用方面需进一步研究。为总结交流科研成果,探讨技术难题与技术发展方向,推动煤矿运输智能化技术发展,进而实现无人化运输目标,《工矿自动化》于2022年第6期策划出版“煤矿智能运输技术与应用”专题。特别感谢中煤科工集团常州研究院有限公司陈晓晶副研究员对专题组稿工作的大力支持!衷心感谢各位专家学者在百忙之中为本专题撰稿! -
![]()
图 1 基于全数字化的FCS分布式带式输送机通信控制架构
Figure 1. Distributed communication control structure of belt conveyor based on full digital fieldbus control system
![]()
图 2 带式输送机多机互联和区域控制
Figure 2. Multi-machine interconnection and zone control of belt conveyor
![]()
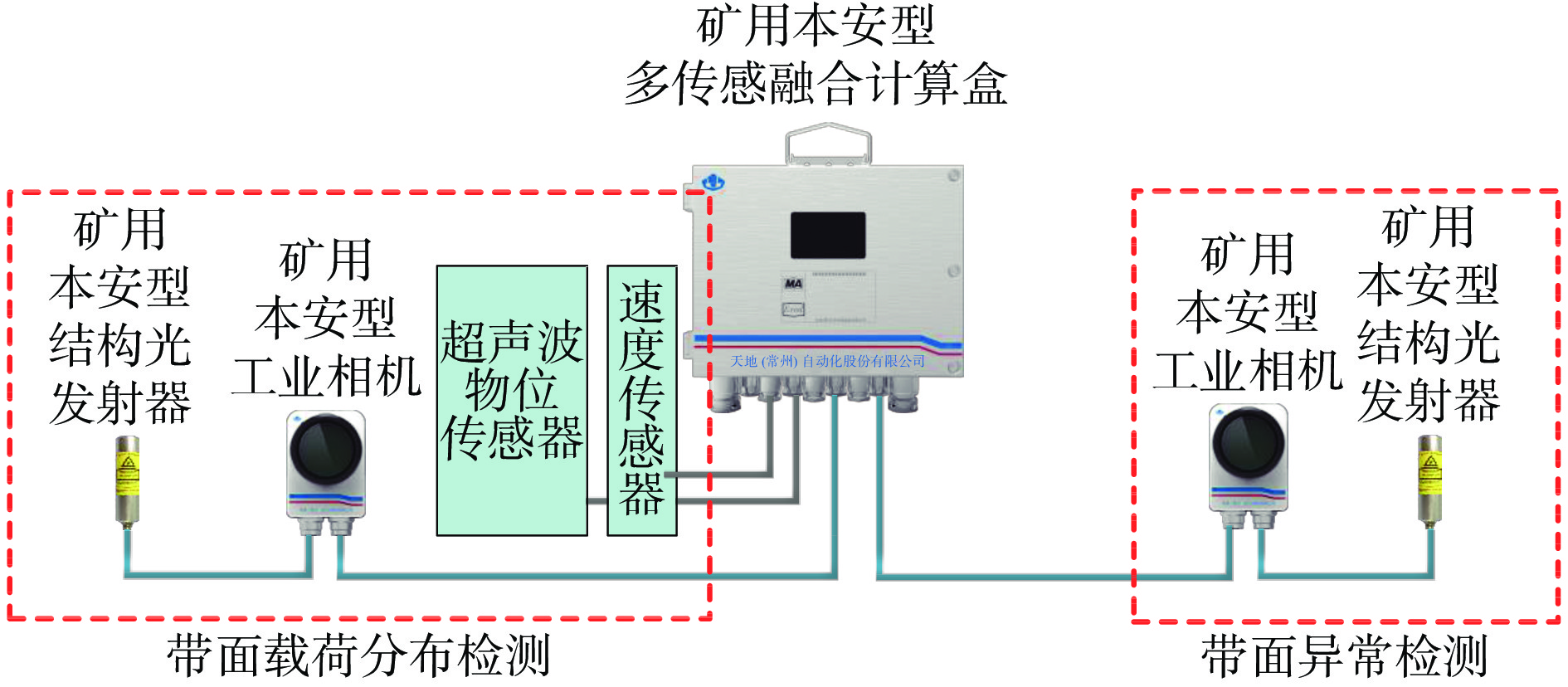
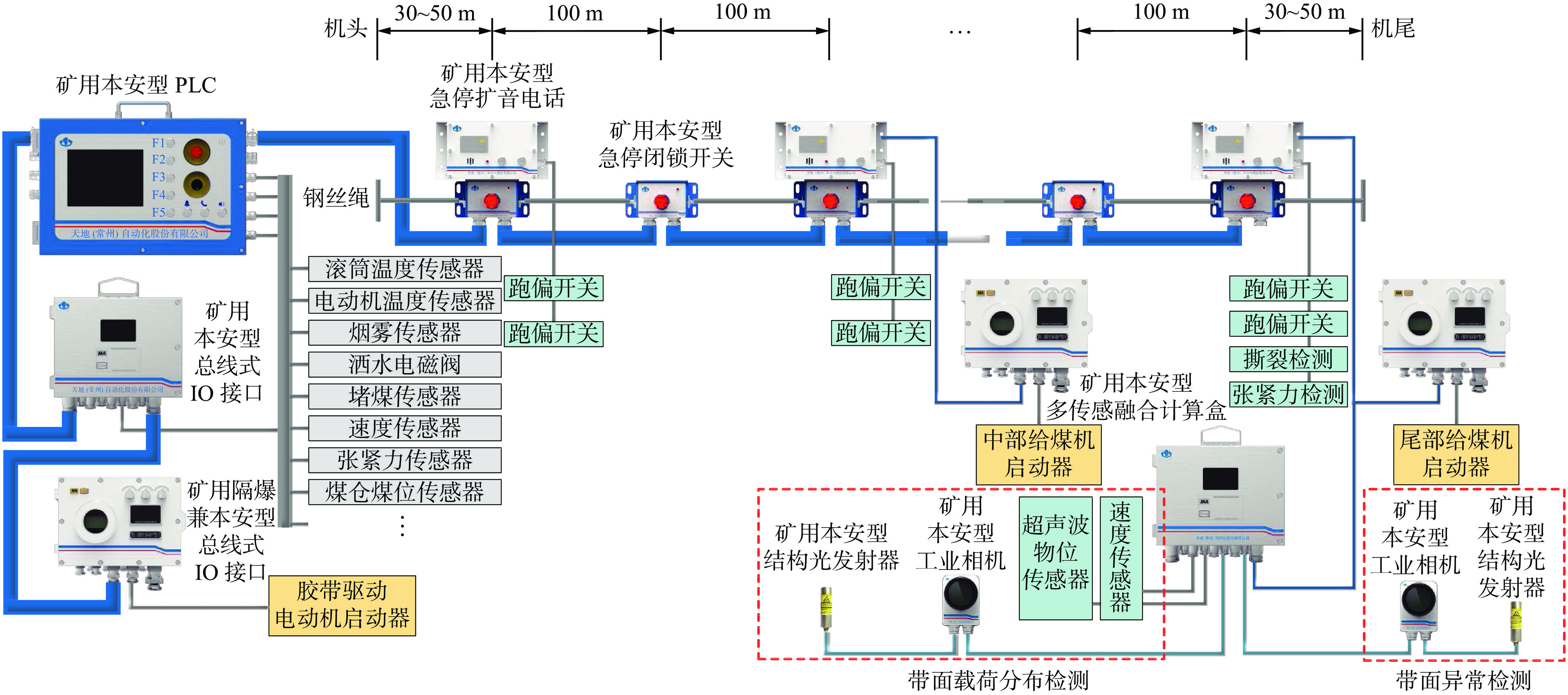
图 3 基于机器音视觉的多传感融合增强型带式输送机保护装置
Figure 3. Enhanced protection devices for belt conveyor based on multi-sensor fusion of machine audio-vision
![]()
图 4 主运煤流协同控制系统界面
Figure 4. Coordinate control system interface of main coal flow transportion
![]()
图 5 基于工业互联网架构的煤矿井下辅助运输管控一体化技术架构
Figure 5. Management and control integration technology structure of underground coal mine auxiliary transportation based on industrial Internet
![]()
图 6 煤矿井下车联网及无人驾驶技术架构
Figure 6. Vehicle-to-everything and unmanned driving technology structure in underground coal mine
-
[1] 王国法. 煤矿智能化最新技术进展与问题探讨[J]. 煤炭科学技术,2022,50(1):1-27. WANG Guofa. New technological progress of coal mine intelligence and its problems[J]. Coal Science and Technology,2022,50(1):1-27.
[2] 王国法,庞义辉,刘峰,等. 智能化煤矿分类、分级评价指标体系[J]. 煤炭科学技术,2020,48(3):1-13. WANG Guofa,PANG Yihui,LIU Feng,et al. Specification and classification grading evaluation index system for intelligent coal mine[J]. Coal Science and Technology,2020,48(3):1-13.
[3] 王国法,刘峰,庞义辉,等. 煤矿智能化−煤炭工业高质量发展的核心技术支撑[J]. 煤炭学报,2019,44(2):349-357. WANG Guofa,LIU Feng,PANG Yihui,et al. Coal mine intellectualization:the core technology of high quality development[J]. Journal of China Coal Society,2019,44(2):349-357.
[4] 张世龙,张民波,朱仁豪,等. 近5年我国煤矿事故特征分析及防治对策[J]. 煤炭与化工,2021,44(8):101-106,109. ZHANG Shilong,ZHANG Minbo,ZHU Renhao,et al. Analysis of the characteristics of China's mine accidents in the past five years and countermeasures for prevention and control[J]. Coal and Chemical Industry,2021,44(8):101-106,109.
[5] 马小平,杨雪苗,胡延军,等. 人工智能技术在矿山智能化建设中的应用初探[J]. 工矿自动化,2020,46(5):8-14. MA Xiaoping,YANG Xuemiao,HU Yanjun,et al. Preliminary study on application of artificial intelligence technology in mine intelligent construction[J]. Industry and Mine Automation,2020,46(5):8-14.
[6] 王国法,赵国瑞,任怀伟. 智慧煤矿与智能化开采关键核心技术分析[J]. 煤炭学报,2019,44(1):34-41. WANG Guofa,ZHAO Guorui,REN Huaiwei. Analysis on key technologies of intelligent coal mine and intelligent mining[J]. Journal of China Coal Society,2019,44(1):34-41.
[7] 丁震,赵永峰,尤文顺,等. 国家能源集团煤矿智能化建设路径研究[J]. 中国煤炭,2020,46(10):35-39. DOI: 10.3969/j.issn.1006-530X.2020.10.007 DING Zhen,ZHAO Yongfeng,YOU Wenshun,et al. Research on coal mine intelligent construction path of China Energy[J]. China Coal,2020,46(10):35-39. DOI: 10.3969/j.issn.1006-530X.2020.10.007
[8] 毛清华,毛金根,马宏伟,等. 矿用带式输送机智能监测系统研究[J]. 工矿自动化,2020,46(6):48-52,58. MAO Qinghua,MAO Jingen,MA Hongwei,et al. Research on intelligent monitoring system of mine-used belt conveyor[J]. Industry and Mine Automation,2020,46(6):48-52,58.
[9] 赵远,吉庆,王腾. 煤矿智能无轨辅助运输技术现状与展望[J]. 煤炭科学技术,2021,49(12):209-216. ZHAO Yuan,JI Qing,WANG Teng. Current status and prospects of intelligent trackless auxiliary transportation technology in coal mines[J]. Coal Science and Technology,2021,49(12):209-216.
[10] 王森良. 煤矿井下单轨吊机车辅助运输系统分析[J]. 矿业装备,2022(1):238-239. DOI: 10.3969/j.issn.2095-1418.2022.01.112 WANG Senliang. Analysis on auxiliary transport system of monorail crane locomotive in coal mine underground[J]. Mining Equipment,2022(1):238-239. DOI: 10.3969/j.issn.2095-1418.2022.01.112
[11] 宋连喜,刘波. 煤矿主运输智能集中控制系统设计[J]. 工矿自动化,2021,47(增刊1):58-63. SONG Lianxi,LIU Bo. Design of intelligent centralized control system for coal mine main transportation[J]. Industry and Mine Automation,2021,47(S1):58-63.
[12] 杜京义,陈瑞,郝乐,等. 煤矿带式输送机异物检测[J]. 工矿自动化,2021,47(8):77-83. DU Jingyi,CHEN Rui,HAO Le,et al. Coal mine belt conveyor foreign object detection[J]. Industry and Mine Automation,2021,47(8):77-83.
[13] 高强,高小强,任文清,等. 主煤流运输无人化智能视频管控系统[J]. 工矿自动化,2021,47(增刊2):60-61,102. GAO Qiang,GAO Xiaoqiang,REN Wenqing,et al. Unmanned intelligent video control system for main coal flow transportation[J]. Industry and Mine Automation,2021,47(S2):60-61,102.
[14] 徐辉,刘丽静,沈科,等. 基于多道线性激光的带式输送机纵向撕裂检测[J]. 工矿自动化,2021,47(7):37-44. XU Hui,LIU Lijing,SHEN Ke,et al. Longitudinal tear detection of belt conveyor based on multi linear lasers[J]. Industry and Mine Automation,2021,47(7):37-44.
[15] 周宇杰,徐善永,黄友锐,等. 基于改进YOLOv4的输送带损伤检测方法[J]. 工矿自动化,2021,47(11):61-65. ZHOU Yujie,XU Shanyong,HUANG Yourui,et al. Conveyor belt damage detection method based on improved YOLOv4[J]. Industry and Mine Automation,2021,47(11):61-65.
[16] 蒋伟,吴高镇. 煤矿主运输煤流线信息支撑系统设计[J]. 工矿自动化,2018,44(10):1-5. JIANG Wei,WU Gaozhen. Design of information support system of coal flow line of coal mine main transportation[J]. Industry and Mine Automation,2018,44(10):1-5.
[17] 李继来. 煤矿井下主运输煤流线协同控制研究[J]. 工矿自动化,2017,43(11):27-30. LI Jilai. Research on coordinate control of underground main coal transport route[J]. Industry and Mine Automation,2017,43(11):27-30.
[18] 高彬,丁恩杰,董飞,等. 基于矿山物联网的井下物资管理系统设计[J]. 工矿自动化,2018,44(1):99-103. GAO Bin,DING Enjie,DONG Fei,et al. Design of underground material management system based on mine Internet of things[J]. Industry and Mine Automation,2018,44(1):99-103.
[19] 陈杨阳,霍振龙,刘智伟,等. 我国煤矿运输机器人发展趋势及关键技术[J]. 煤炭科学技术,2020,48(7):233-242. CHEN Yangyang,HUO Zhenlong,LIU Zhiwei,et al. Development trend and key technology of coal mine transportation robot in China[J]. Coal Science and Technology,2020,48(7):233-242.
-
期刊类型引用(1)
1. 李昌杰,辛创业,王昊. 综掘工作面气幕控尘参数对粉尘污染的影响. 工矿自动化. 2024(10): 160-167 .  本站查看
本站查看
其他类型引用(3)

 下载:
下载:









计量
- 文章访问数: 1439
- HTML全文浏览量: 418
- PDF下载量: 315
- 被引次数: 4
