| Citation: |
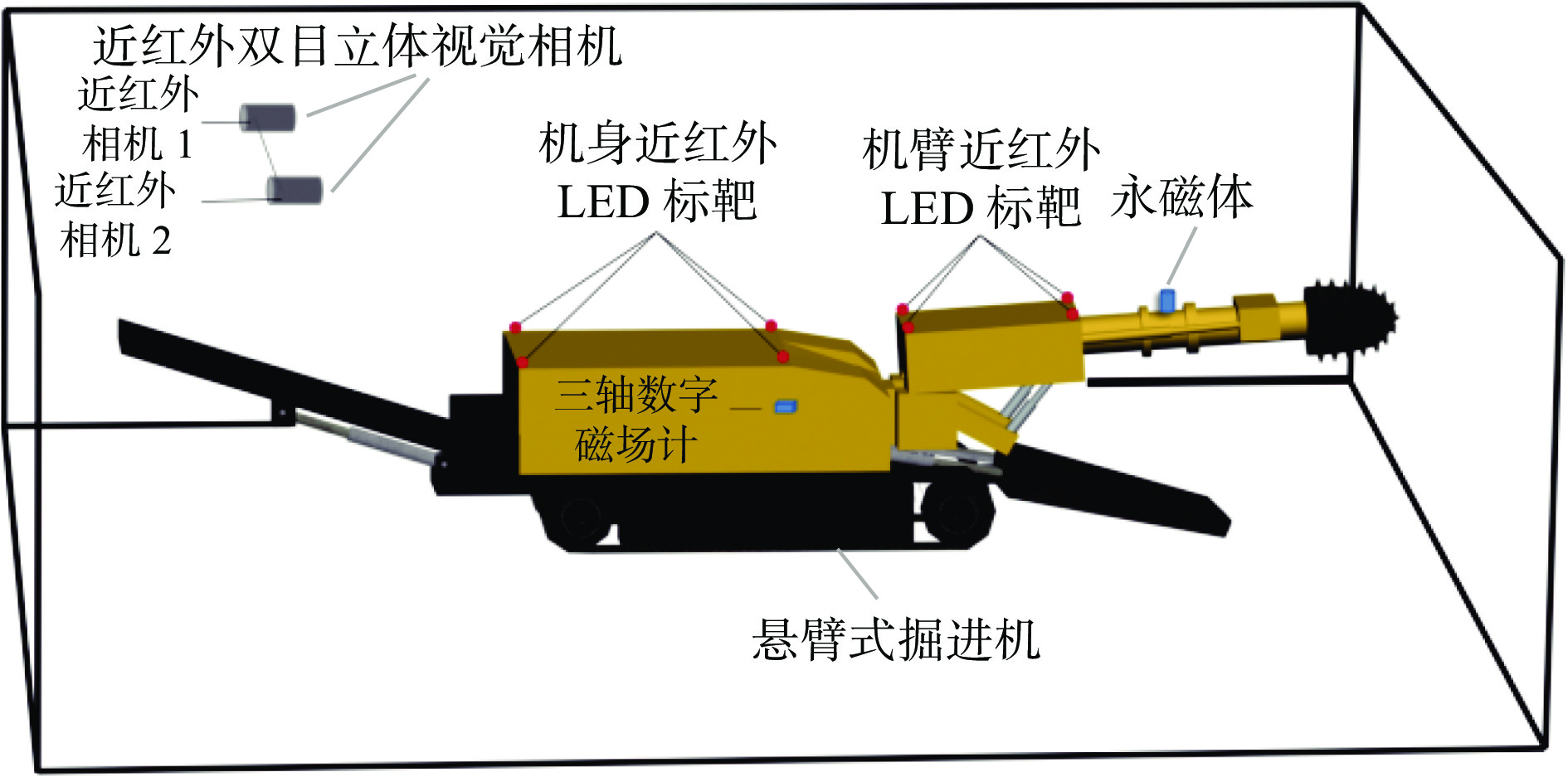
WANG Xue, ZHOU Hongxu, ZHANG Lei, et al. Research on the cantilever roadheader positioning based on near-infrared binocular stereo vision[J]. Journal of Mine Automation,2022,48(7):43-51, 57. DOI: 10.13272/j.issn.1671-251x.17896

|
| [1] |
刘峰,曹文君,张建明,等. 我国煤炭工业科技创新进展及“十四五”发展方向[J]. 煤炭学报,2021,46(1):1-15.
LIU Feng,CAO Wenjun,ZHANG Jianming,et al. Current technological innovation and development direction of the 14th Five-Year Plan period in China coal industry[J]. Journal of China Coal Society,2021,46(1):1-15.
|
| [2] |
杜雨馨,刘停,童敏明,等. 基于机器视觉的悬臂式掘进机机身位姿检测系统[J]. 煤炭学报,2016,41(11):2897-2906.
DU Yuxin,LIU Ting,TONG Minming,et al. Pose measurement system of boom-type roadheader based on machine vision[J]. Journal of China Coal Society,2016,41(11):2897-2906.
|
| [3] |
雷孟宇, 张旭辉, 杨文娟, 等. 煤矿掘进装备视觉位姿检测与控制研究现状与趋势[J/OL]. 煤炭学报: 1-14 [2022-01-06]. DOI: 10.13225/j. cnki. jccs. JJ21.0534.
LEI Mengyu, ZHANG Xuhui, YANG Wenjuan, et al. Current status and trend of research on visual pose detection and control of tunneling equipment in coal mines[J/OL]. Journal of China Coal Society: 1-14[202201-06]. DOI: 10.13225/j.cnki.jccs.JJ21.0534.
|
| [4] |
朱信平,李睿,高娟,等. 基于全站仪的掘进机机身位姿参数测量方法[J]. 煤炭工程,2011(6):113-115. DOI: 10.3969/j.issn.1671-0959.2011.06.044
ZHU Xinping,LI Rui,GAO Juan,et al. Measurement method of body pose parameters of roadheader based on total station[J]. Coal Engineering,2011(6):113-115. DOI: 10.3969/j.issn.1671-0959.2011.06.044
|
| [5] |
田原. 基于零速修正的掘进机惯性导航定位方法[J]. 工矿自动化,2019,45(8):70-73.
TIAN Yuan. Inertial navigation positioning method of roadheader based on zero-velocity update[J]. Industry and Mine Automation,2019,45(8):70-73.
|
| [6] |
陶云飞,宗凯,张敏骏,等. 基于iGPS的掘进机单站多点分时机身位姿测量方法[J]. 煤炭学报,2015,40(11):2611-2616.
TAO Yunfei,ZONG Kai,ZHANG Minjun,et al. Aposition and orientation measurement method of single-station,multipoint and time-sharing for roadheader body based on iGPS[J]. Journal of China Coal Society,2015,40(11):2611-2616.
|
| [7] |
陶云飞,李瑞,李嘉赓,等. iGPS的单站多点分时测量系统对掘进机偏向位移精度研究[J]. 煤炭技术,2017,36(2):246-247.
TAO Yunfei,LI Rui,LI Jiageng,et al. Research on positioning accuracy of roadheader based on singlestation,multipoint and time-shared of iGPS measurement system[J]. Coal Technology,2017,36(2):246-247.
|
| [8] |
FU Shishen,LI Yiming,ZONG Kai,et al. Ultra-wideband pose detection method based on TDOA positioning model for boom-type roadheader[J]. AEU-International Journal of Electronics and Communications,2018,99:70-80.
|
| [9] |
符世琛,李一鸣,杨健健,等. 基于超宽带技术的掘进机自主定位定向方法研究[J]. 煤炭学报,2015,40(11):2603-2610.
FU Shichen,LI Yiming,YANG Jianjian,et al. Research on autonomous positioning and orientation method of roadheader based on ultra wide-band technology[J]. Journal of China Coal Society,2015,40(11):2603-2610.
|
| [10] |
杨文娟,张旭辉,马宏伟,等. 悬臂式掘进机机身及截割头位姿视觉测量系统研究[J]. 煤炭科学技术,2019,47(6):50-57.
YANG Wenjuan,ZHANG Xuhui,MA Hongwei,et al. Research on position and posturel measurement system of body and cutting head for boom-type roadheader based on machine vision[J]. Coal Science and Technology,2019,47(6):50-57.
|
| [11] |
LIANG Jiefeng,JING Tianjun,NIU Huanna,et al. Two-terminal fault location method of distribution network based on adaptive convolution neural network[J]. IEEE Access,2020,8:54035-54043. DOI: 10.1109/ACCESS.2020.2980573
|
| [12] |
周飞燕,金林鹏,董军. 卷积神经网络研究综述[J]. 计算机学报,2017,40(6):1229-1251. DOI: 10.11897/SP.J.1016.2017.01229
ZHOU Feiyan,JIN Linpeng,DONG Jun. Review of convolutional neural network[J]. Chinese Journal of Computers,2017,40(6):1229-1251. DOI: 10.11897/SP.J.1016.2017.01229
|
| [13] |
牛乃平,张小刚,丁华. 基于1D-CNN的采煤机摇臂齿轮故障诊断[J]. 煤矿机械,2020,41(11):148-150.
NIU Naiping,ZHANG Xiaogang,DIGN Hua. Fault diagnosis of shearer rocker arm gear based on 1D-CNN[J]. Coal Mine Machinery,2020,41(11):148-150.
|
| [14] |
马乔雨,张欣,张春雷,等. 基于一维卷积神经网络的横波速度预测[J]. 岩性油气藏,2021,33(4):111-120. DOI: 10.12108/yxyqc.20210412
MA Qiaoyu,ZHANG Xin,ZHANG Chunlei,et al. Shear wave velocity prediction based on one-dimensional convolutional neural network[J]. Lithologic Reservoirs,2021,33(4):111-120. DOI: 10.12108/yxyqc.20210412
|
| [15] |
王志同,牛志刚,郭晨星,等. 可自动回撤煤矿探测机器人设计[J]. 工矿自动化,2018,44(5):6-12.
WANG Zhitong,NIU Zhigang,GUO Chenxing,et al. Design of coal mine detection robot with automatic returning[J]. Industry and Mine Automation,2018,44(5):6-12.
|
| [16] |
司垒. 采煤机智能控制关键技术研究[D]. 徐州: 中国矿业大学, 2015.
SI Lei. Research on key technologies of intelligent control for shearer[D]. Xuzhou: China University of Mining and Technology, 2015.
|
| 1. |
王生状. 关于提升机电控系统耦合区域故障诊断研究. 煤. 2023(03): 74-76 .

| |
| 2. |
旷永龙. 基于PLC的矿井提升机自动控制装置的设计与实现. 机械管理开发. 2023(03): 193-195 .
| |
| 3. |
王敏. 绞车提升信号系统优化及应用. 机械工程与自动化. 2023(06): 169-171 .
| |
| 4. |
李丽鹏. 矿井提升机自动控制系统的设计与实现. 机电工程技术. 2021(04): 74-75+84 .
| |
| 5. |
王泽. 基于PLC的矿井提升机智能型电控系统的分析. 机械管理开发. 2020(01): 182-183 .
| |
| 6. |
张翰东. 基于PLC的矿井提升机智能型电控系统的设计开发. 机械研究与应用. 2019(04): 196-198 .
| |
| 7. |
陈英豪. 主井机电与管控信息一体化系统的实践研究. 山东煤炭科技. 2019(08): 133-135 .
| |
| 8. |
李斐. 阳煤集团二矿副井提升机电控系统的改造. 机械管理开发. 2019(11): 142-143+226 .
| |
| 9. |
谭宇硕. 基于PLC的矿井提升机电控系统设计. 煤炭技术. 2018(07): 276-279 .
|
Supported by: Beijing Renhe Information Technology Co.,
Ltd. Visits:1374884


 DownLoad:
DownLoad: