Abstract:
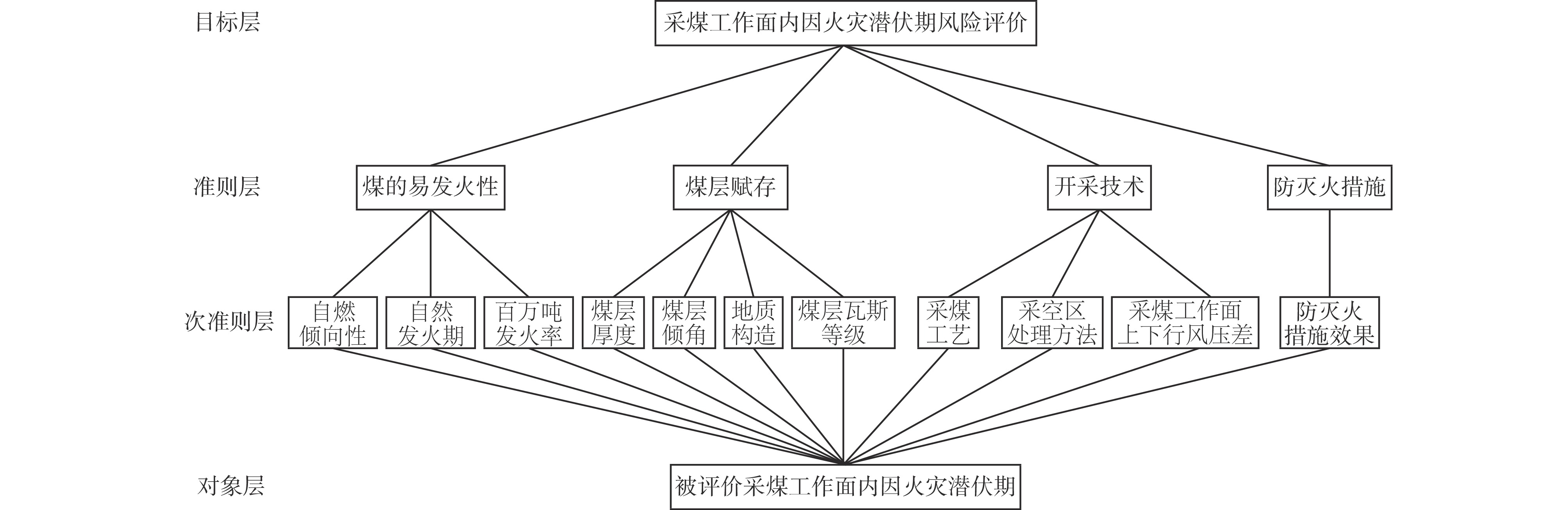
The mine fire risk evaluation method has problems of single evaluation dimension, incomplete evaluation index and unreliable evaluation result. In order to solve the above problems, based on the analytic hierarchy process, a staged multi-index comprehensive evaluation method for fire risk of coal working face is put forward. In order to analyze the coal working face internal fire, the method selects spontaneous combustion tendency, spontaneous combustion period, million-ton ignition rate, coal seam thickness, coal seam dip angle, geological structure, coal seam gas grade, coal mine process, goaf treatment method, upper and lower traveling wind pressure difference of the coal working face, the effectiveness of fire prevention and extinguish measures, self-heating period stage and Graham index as evaluation indexes. The method calculates the evaluation index score by adopting an interpolation method and gives weight to each evaluation index. Then the fire risk scores of the three stages including incubation period, self-heating period and combustion period are obtained. When the risk score of the incubation period of the internal fire in the coal working face is more than 50 points, the score is taken as the final score of the internal fire risk of the coal working face. Otherwise, it will enter the risk evaluation of the self-heating period. When the risk score of the self-heating period of the internal fire in the coal working face is greater than 50 points, this score will be taken as the final score of the internal fire risk of the coal working face. Otherwise, it will enter the risk evaluation of the combustion period. When entering the risk evaluation of combustion period, the internal fire risk score of the coal working face is directly set as zero. Aiming at the external fire risk of the coal working face, this study relies on the fire online monitoring, risk graded management and control and hidden danger investigation mechanism. The study takes the following factors as the evaluation indexes to score the external fire risk of the coal working face. The factors include temperature, oxygen volume fraction, carbon monoxide volume fraction, overdue hidden danger without receiving orders, overdue hidden danger without rectification, unqualified hidden danger review, overdue risk control measures without feedback, overdue risk control measures without review, unqualified risk control measures review. The lowest risk score of internal and external fire in the coal working face is taken as the fire risk score of the coal working face. The higher the score, the lower the fire risk of coal working face.
CHEN Xiaolin. Staged multi-index comprehensive evaluation method for fire risk of coal working face[J]. Journal of Mine Automation,2022,48(7):90-95, 104. doi: 10.13272/j.issn.1671-251x.2021120083.