
Human posture detection method in coal mine
-
摘要: 煤矿井下作业人员姿态检测可为灾害预警和事故救援提供有效信息。井下人员姿态复杂多样,且为时间序列数据,现有人体姿态检测方法或难以处理连续相关的姿态数据,或因算法复杂需配置独立计算机而导致实时性较差。针对上述问题,提出了一种基于改进长短期记忆网络(LSTM)的煤矿井下人体姿态检测方法,通过压力传感器、角度传感器获取井下人员脚底压力、腰腿部角度等姿态数据,由人员随身携带的便携式边缘运算决策单元进行姿态判别,实现井下工作人员站立、行走、弯腰、蹲(坐)、躺卧5种姿态的实时检测。为降低人体姿态原始采样数据维度,提高运算效率,对LSTM进行改进,设计了长短期记忆稀疏自编码器(LSTMSA),先由稀疏自编码器(SA)对原始采样数据进行特征提取,实现降维,再由LSTM进行人体姿态检测。在实验室环境下采集人体姿态数据,分别对LSTMSA、LSTM、循环神经网络(RNN)进行训练和测试,结果表明:在相同的试验设置和采样数据下,LSTMSA对5种人体姿态检测的准确率均达到90%以上,与LSTM接近且大于RNN;LSTMSA运算时间较LSTM缩短50%以上,满足矿井人体姿态检测实时性要求。Abstract: The posture detection of underground personnel can provide effective information for disaster warning and accident rescue. The postures of the underground personnel are complex and diverse and they are time series data. The existing human posture detection methods are difficult to process continuous related posture data. And the real-time performance is poor due to the complex algorithm and the need to configure an independent computer. In order to solve the above problems, a human posture detection method in coal mine based on improved long short term memory network(LSTM) is proposed. The pressure sensor and angle sensor are used to obtain the posture data of underground personnel, such as foot pressure, waist and leg angle, etc. The portable edge operation decision unit carried by the personnel can discriminate the posture. It can realize the real-time detection of five postures of underground personnel, such as standing, walking, bending, squatting (sitting) and lying down. In order to reduce the dimension of the original sampled data of human posture and improve the compute efficiency, LSTM is improved. The long short term memory sparse autoencoder(LSTMSA) is designed. The characteristics of the original sampled data is extracted by the sparse autoencoder(SA) to reduce the dimension, and then the human posture is detected by the LSTM. Human posture data are collected in the laboratory environment, and LSTMSA, LSTM and recursive neural network(RNN) are trained and tested respectively. The results show that under the same experimental settings and sampling data, the accuracy of LSTMSA for five kinds of human posture detection reaches more than 90%, which is close to LSTM and greater than RNN. The computing time of LSTMSA is shortened by more than 50% compared with LSTM, which meets the real-time requirements of human posture detection in coal mine.
-
0. 引言
煤矿井下环境恶劣且具有危险性,对井下工作人员姿态的规范性要求较高。井下作业场所的特点决定了作业人员的姿态特征,包括站立、行走、蹲(坐)等,而跌倒、在运输巷或罐笼处躺卧等为不安全姿态。人体姿态包含大量有价值的原始数据,可为煤矿井下灾害预警和矿山救援提供有效信息[1]。对井下工作人员进行姿态检测,有利于提高井下人员姿态的规范性,保障其人身安全,对提高矿井安全生产水平有实际意义。
人体姿态检测技术可分为基于机器学习和基于惯性测量2类。在基于机器学习的人体姿态检测技术方面,L. Bourdev等[2]采用支持向量机和随机森林算法估计人体姿态;郑莉莉等[3]采用径向基核支持向量机完成对不同人体姿态的估计;黄心汉等[4]采用Faster R−CNN目标检测架构和ZFNet卷积神经网络对识别目标进行姿态检测,具有环境适应性强、速度快等优势;许志强[5]提出了一种基于深度学习的实时人体姿态估计系统,借助卷积姿态机算法完成人体关键点的姿态检测,利用3D游戏引擎Unity完成虚拟人体骨架搭建,实现人体姿态实时检测;钱志华等[6]设计了姿态检测元模型和参数可学习的域适应优化器,通过离线学习和在线学习相结合的方式进行多场景人员姿态检测。在基于惯性测量的人体姿态检测技术方面,S. K. Song等[7]采用三轴加速度计设计了可穿戴模块,可实现对常见人体姿态的检测;曹玉珍等[8]提出了基于MEMS(Micro−Electro−Mechanical System,微机电系统)加速度传感器的人体姿态检测方法,可判断人体跌倒状态;J. Stamatakis等[9]利用加速度传感器设计了一套步伐测量系统,可对帕金森患者的步态进行检测;陈超强等[10]认为人体在行走过程中下肢步态具有一定的周期性,提出了基于惯性测量方法的下肢外骨骼步态预测方法,解决了下肢外骨骼机器人跟随控制问题。
上述方法均在一定程度上实现了人体姿态检测,但应用于煤矿井下效果较差,主要原因是井下人员姿态较多,且姿态数据为时间序列,对时间延迟敏感,而支持向量机、随机森林算法等不能较好地存储计算结果[2],对时间序列数据计算能力较差,难以处理连续相关数据。另外,上述方法在处理人员姿态数据时依赖于硬件系统强大的计算能力,需将采集数据传送至独立计算机处理,导致延时问题[11-12]。
笔者所在研发团队提出了一种基于改进LSTM(Long Short Term Memory,长短期记忆网络)的煤矿井下人体姿态检测方法。该方法通过压力传感器、角度传感器采集井下工作人员脚底压力、腰腿部角度数据,采用便携式边缘运算决策单元进行姿态判别,无需将采集数据传送至地面计算机进行姿态判断,保证了数据实时性。
1. 人体姿态检测方法
1.1 井下人体姿态分类
根据煤矿井下对作业人员姿态判断的实际需要,将井下人体姿态分为站立、行走、弯腰、蹲(坐)、躺卧5种,见表1。
表 1 煤矿井下人体姿态分类Table 1. Human posture classification in coal mine underground姿态 描述 站立 默认初始状态,身体呈1条直线并直立 行走 双腿交替前移,在1个周期内呈现比较有规律的角度、幅度
变化,身体姿态基本直立弯腰 下半身肢体直立,上半身躯体弯曲,与下半身肢体呈一夹角 蹲(坐) 双腿弯曲,臀部、双腿和上身形成3个面,臀部与双腿和上身
呈一定角度;上半身可直立或前倾躺卧 身体呈1条直线并全身着地 1.2 人体姿态数据采集
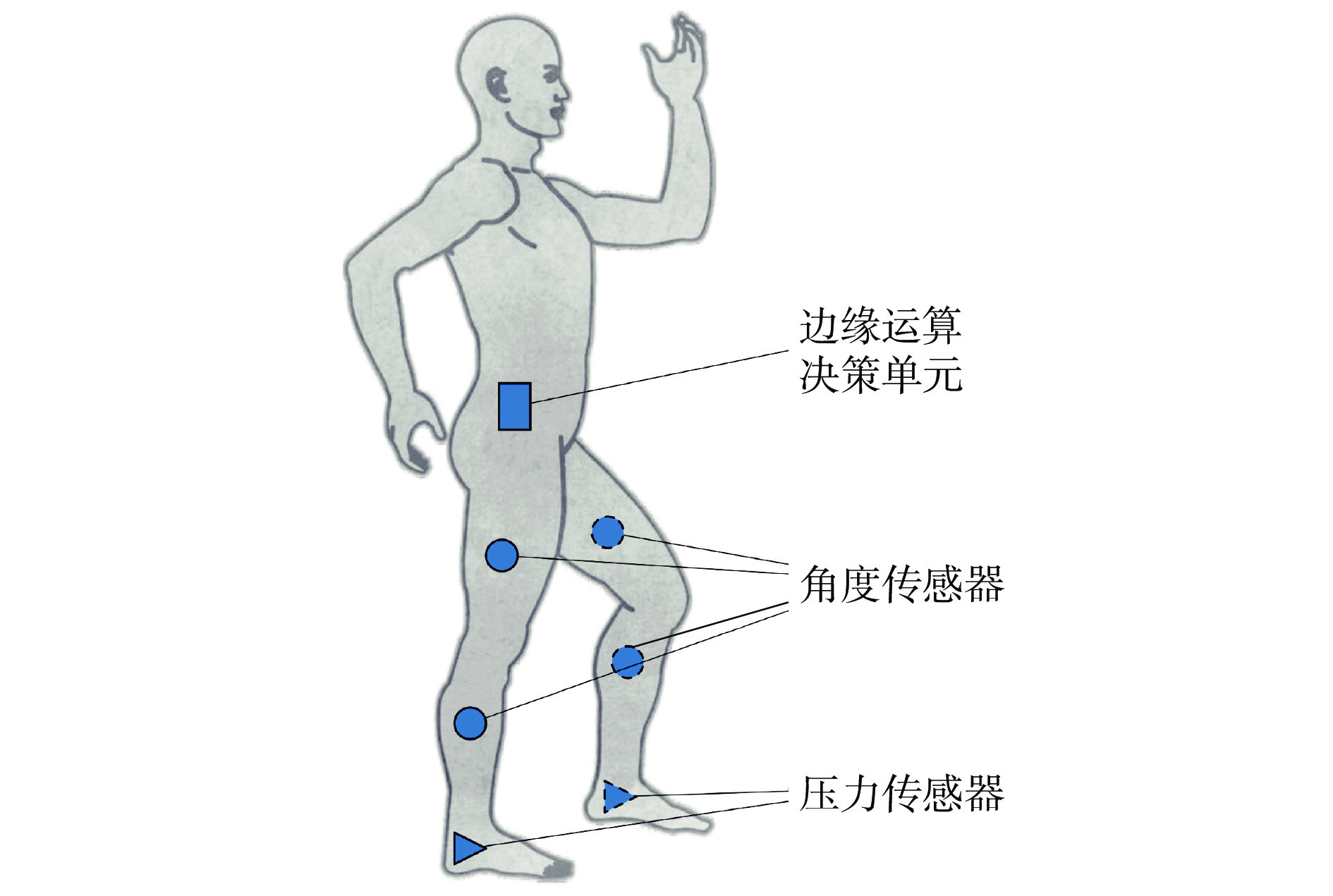
设置4个角度传感器、2个压力传感器及边缘运算决策单元(内置1个角度传感器)获取人体姿态数据。数据采集装置布置如图1所示。压力传感器与特制硅胶鞋垫作为一体,置于井下人员的工作靴中,用于采集左右脚底压力数据。4个角度传感器分别安装在人员左右小腿和大腿外侧,采用伸缩带固定在工作裤上,用于采集人员腿部角度数据。边缘运算决策单元置于腰间,用于采集腰部角度数据。压力传感器和角度传感器将采集数据发送给边缘运算决策单元进行处理。
1.3 人体姿态数据边缘运算
人体姿态数据采样值定义见表2。压力传感器的1个采样值为1个数据点,角度传感器获取的任一姿态轴角度为1个数据点。考虑到小腿仅在踢腿动作时存在0~90°角度变化,为减小计算复杂度,将小腿角度采样值设为一维数据。某时刻所有采样值组成的向量为1个时间序列数据[8-9],设为I=[X1,X2,…,X19]。
表 2 人体姿态数据采样值定义Table 2. Definition of sampled human posture data数据采集装置 传感器名称 采样值符号 边缘运算决策单元 三轴角度传感器1
(输出三轴角度)X1(腰部x轴角度),X2(腰部
y轴角度),X3(腰部z轴角度)压力传感器(左脚,
含4个压力应变片)压力应变片1
(左脚脚尖)X4(左脚脚尖压力) 压力应变片2
(左脚内侧)X5(左脚内侧压力) 压力应变片3
(左脚外侧)X6(左脚外侧压力) 压力应变片4
(左脚脚跟)X7(左脚脚跟压力) 压力传感器(右脚,
含4个压力应变片)压力应变片5
(右脚脚尖)X8(右脚脚尖压力) 压力应变片6
(右脚内侧)X9(右脚内侧压力) 压力应变片7
(右脚外侧)X10(右脚外侧压力) 压力应变片8
(右侧脚跟)X11(右脚脚跟压力) 角度传感器
(左大腿)三轴角度传感器2
(输出三轴角度)X12(左腿x轴角度),X13(左腿
y轴角度),X14(左腿z轴角度)角度传感器
(右大腿)三轴角度传感器3
(输出三轴角度)X15(右腿x轴角度),X16(右腿
y轴角度),X17(右腿z轴角度)角度传感器
(左小腿)单轴角度传感器1
(输出一轴角度)X18(左小腿与左大腿夹角) 角度传感器
(右小腿)单轴角度传感器2
(输出一轴角度)X19(右小腿与右大腿夹角) 人体姿态数据采集装置对原始数据进行平均值滤波等预处理后,发送至边缘运算决策单元。边缘运算决策单元以Intel Edison模块为处理器,运行基于改进LSTM的人体姿态检测算法实现姿态估计;采用1 700 mA·h,4.2 V锂电池供电,正常工作时间可达48 h。
2. 基于改进LSTM的人体姿态检测模型
LSTM适用于处理和预测时间序列中间隔和延迟非常大的信息[10],其作为RNN(Recursive Neural Network,循环神经网络)[13-14]的改进型网络,能够解决RNN存在的长期依赖问题,但其存在算法复杂性高、计算耗时长等问题,不适合处理高维序列数据。
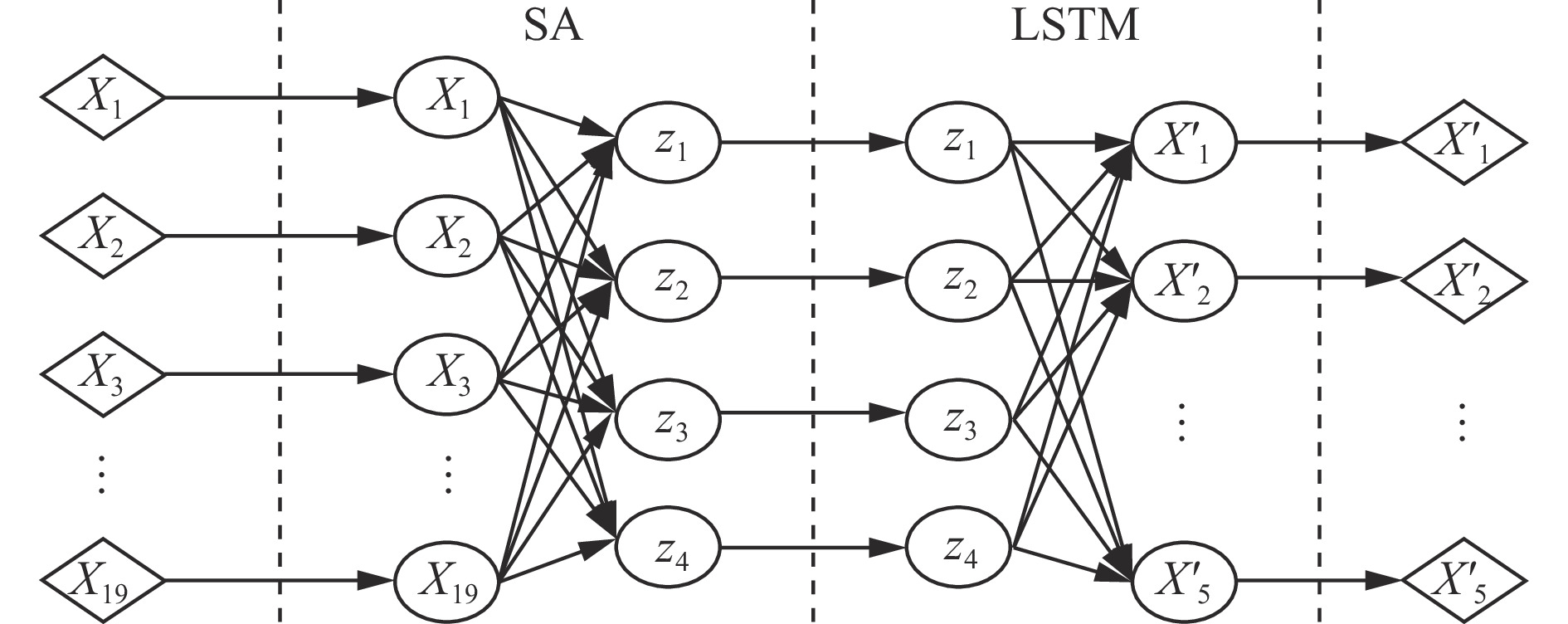
边缘运算决策单元的输入数据为19维时间序列数据,若直接输入LSTM,将导致姿态检测实时性较差。另外,高维序列数据会增加算法复杂度,降低计算效率。因此,本文将SA(Sparse Autoencoder,稀疏自编码器)引入LSTM,设计了LSTMSA(Long Short Term Memory Sparse Autoencoder,长短期记忆稀疏自编码器),其网络结构如图2所示。
![]() 图 2 LSTMSA网络结构Figure 2. Network structure of long short term memory sparse autoencoder (LSTMSA)
图 2 LSTMSA网络结构Figure 2. Network structure of long short term memory sparse autoencoder (LSTMSA)LSTMSA 中,SA作为网络结构的前级,对输入数据进行编码、降维,减轻LSTM运算负担。SA由2层卷积层组成:第1层为输入层,用于接收19维数据;第2层为输出层,也是整个LSTMSA的第1层隐藏层,用于对输入数据进行特征提取,实现数据降维。LSTM作为网络结构后级,由1层隐藏层和1层输出层组成,根据SA提取的特征数据进行人体姿态估计。
由于LSTM输出为5类结果,则其输入数据不得高于5维,所以设置SA输出4维数据,令其为Z=[z1,z2,z3,z4]。
$$ {\textit{z}}_1 = {X_1}{w_{1,1}} + {X_2}{w_{2,1}} + \cdots + {X_{19}}{w_{19,1}} $$ (1) $$ {\textit{z}}_2 = {X_1}{w_{1,2}} + {X_2}{w_{2,2}} + \cdots + {X_{19}}{w_{19,2}} $$ (2) $$ {\textit{z}}_3 = {X_1}{w_{1,3}} + {X_2}{w_{2,3}} + \cdots + {X_{19}}{w_{19,3}} $$ (3) $$ {\textit{z}}_4 = {X_1}{w_{1,4}} + {X_2}{w_{2,4}} + \cdots + {X_{19}}{w_{19,4}} $$ (4) 式中wi,j为SA输入层第i(i=1,2,…,19)个神经元与输出层第j(j=1,2,3,4)个神经元之间的计算权值。
LSTM使用门控机制对输入的特征向量流通和损失进行引导[15],从而输出5维向量O=[
$X_1', X'_2, X'_3, $ $ X'_4, X'_5$ ],$X_1' $ —$X_5' $ 分别表示站立、行走、弯腰、蹲(坐)、躺卧姿态,其值为1或0。输出向量中为1的维度即得出的估计姿态,如O=[0,1,0,0,0]表示估计姿态为行走。3. 试验与结果分析
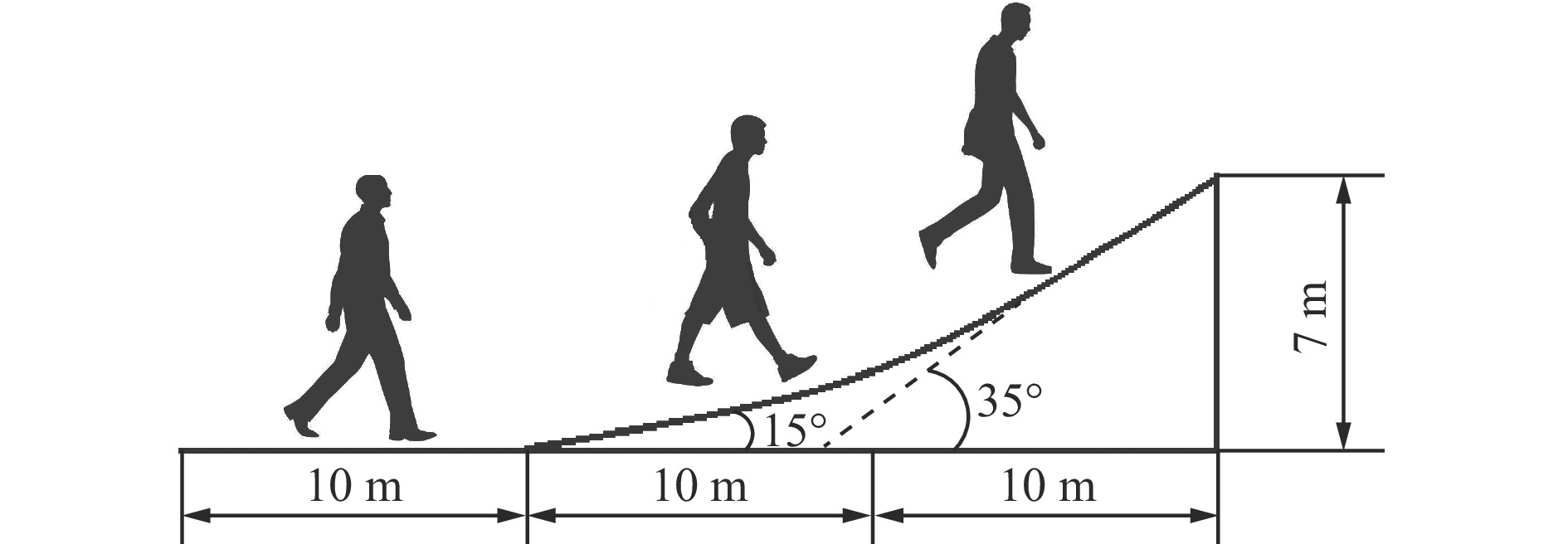
基于煤矿井下人体姿态检测方法,设计嵌入式可穿戴人体姿态检测平台,在实验室环境下进行人体姿态检测试验。测试者为5位24~28岁健康成年人,身穿井下工作服在坡度为0,15,35°的地面上完成行走、站立、弯腰、蹲(坐)、躺卧5种姿态,如图3所示。
试验要求:① 姿态数据采样时间为0.02 s。② 在同一环境下进行试验,每位测试者均参与3组试验的姿态数据采集。③ 测试者动作满足表1要求(测试者姿态习惯不同,可模拟实际应用环境中煤矿井下人员的行为姿态差异)。④ 硬件设备结构、安装角度、位置不变(实际测试中会略有差异,模拟实际应用环境下井下人员穿戴差异)。
试验时对每种姿态均采集4 000组数据,随机分为训练集和测试集,各包含2 000组数据。采用训练集分别对LSTMSA,LSTM,RNN进行200轮训练,得到基于不同网络的人体姿态检测模型。网络训练环境为Ubuntu16.04系统、Nvidia GTX 3080TI显卡。
将测试集数据分别输入LSTMSA,LSTM,RNN进行人体姿态检测,结果见表3—表5。可看出3种算法均能实现对人体姿态的有效检测,虽然RNN无法处理连续时间序列数据,但得益于本文方法通过多维数据采样来提高检测准确率的方式,RNN对于人体姿态的检测准确率平均达到80%以上。
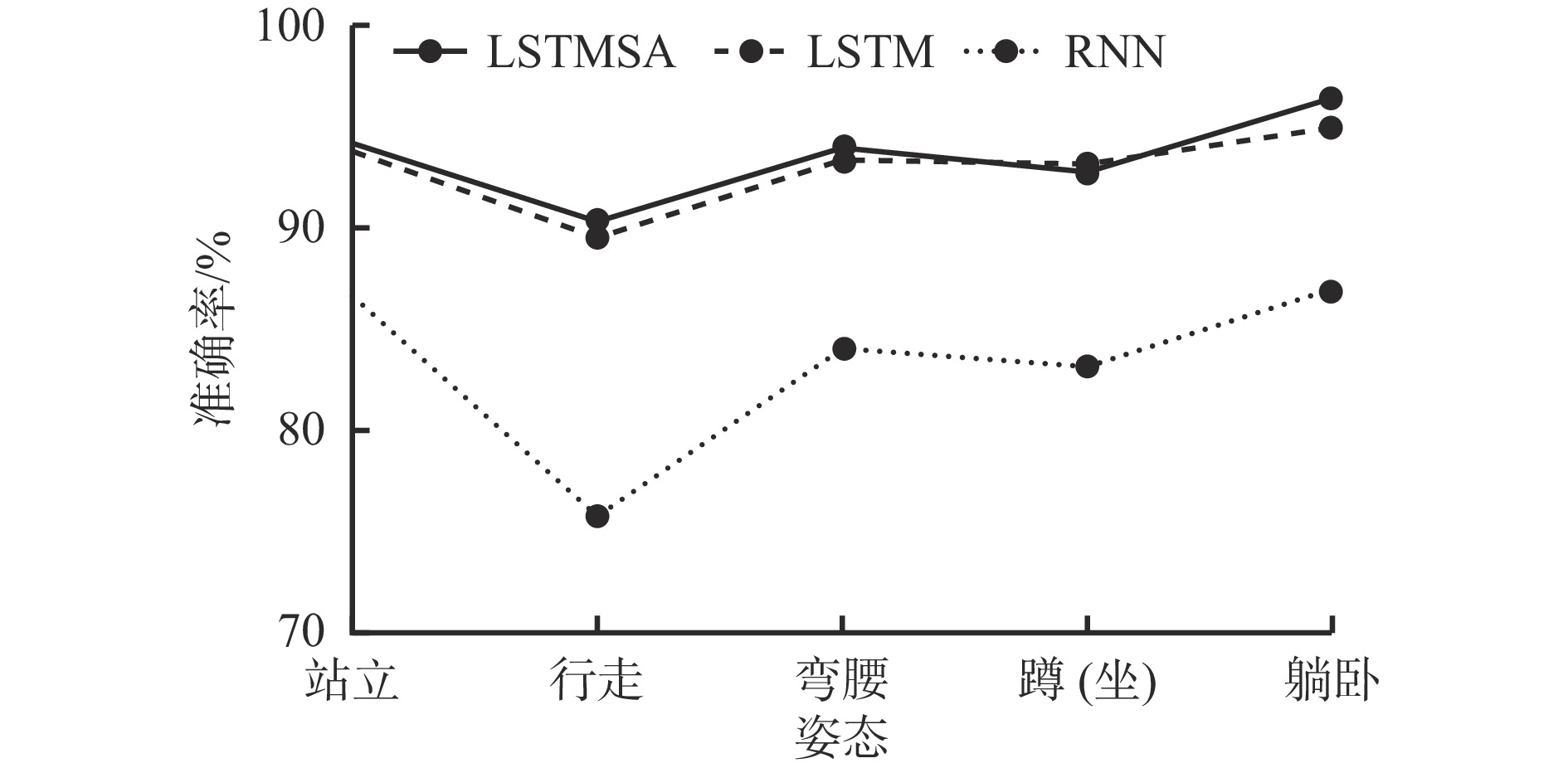
表 3 LSTMSA人体姿态检测结果Table 3. Human posture detection results of LSTMSA指标 姿态 站立 行走 弯腰 蹲(坐) 躺卧 检测为站立组数 1881 90 31 0 3 检测为行走组数 76 1 804 24 34 22 检测为弯腰组数 38 33 1 878 98 7 检测为蹲(坐)组数 3 61 62 1 854 43 检测为躺卧组数 2 12 5 14 1 925 准确率/% 94.05 90.2 93.9 92.7 96.25 运算时间/s 15.37 14.23 15.88 15.43 14.67 表 4 LSTM人体姿态检测结果Table 4. Human posture detection results of long short-term memory(LSTM)指标 姿态 站立 行走 弯腰 蹲(坐) 躺卧 检测为站立组数 1 875 105 60 11 2 检测为行走组数 83 1 789 29 22 13 检测为弯腰组数 26 57 1 866 92 12 检测为蹲(坐)组数 10 38 37 1 862 75 检测为躺卧组数 6 11 8 13 1 898 准确率/% 93.75 89.45 93.3 93.1 94.9 运算时间/s 35.74 32.69 38.12 34.4 34.89 3种算法对人体姿态检测的准确率如图4所示。可看出LSTMSA,LSTM的准确率几乎相同,可见是否采用SA对LSTM检测准确率影响较小,而RNN准确率较其他2种算法低;在5种人体姿态中,行走姿态的检测准确率最低,站立和躺卧姿态的检测准确率较高。
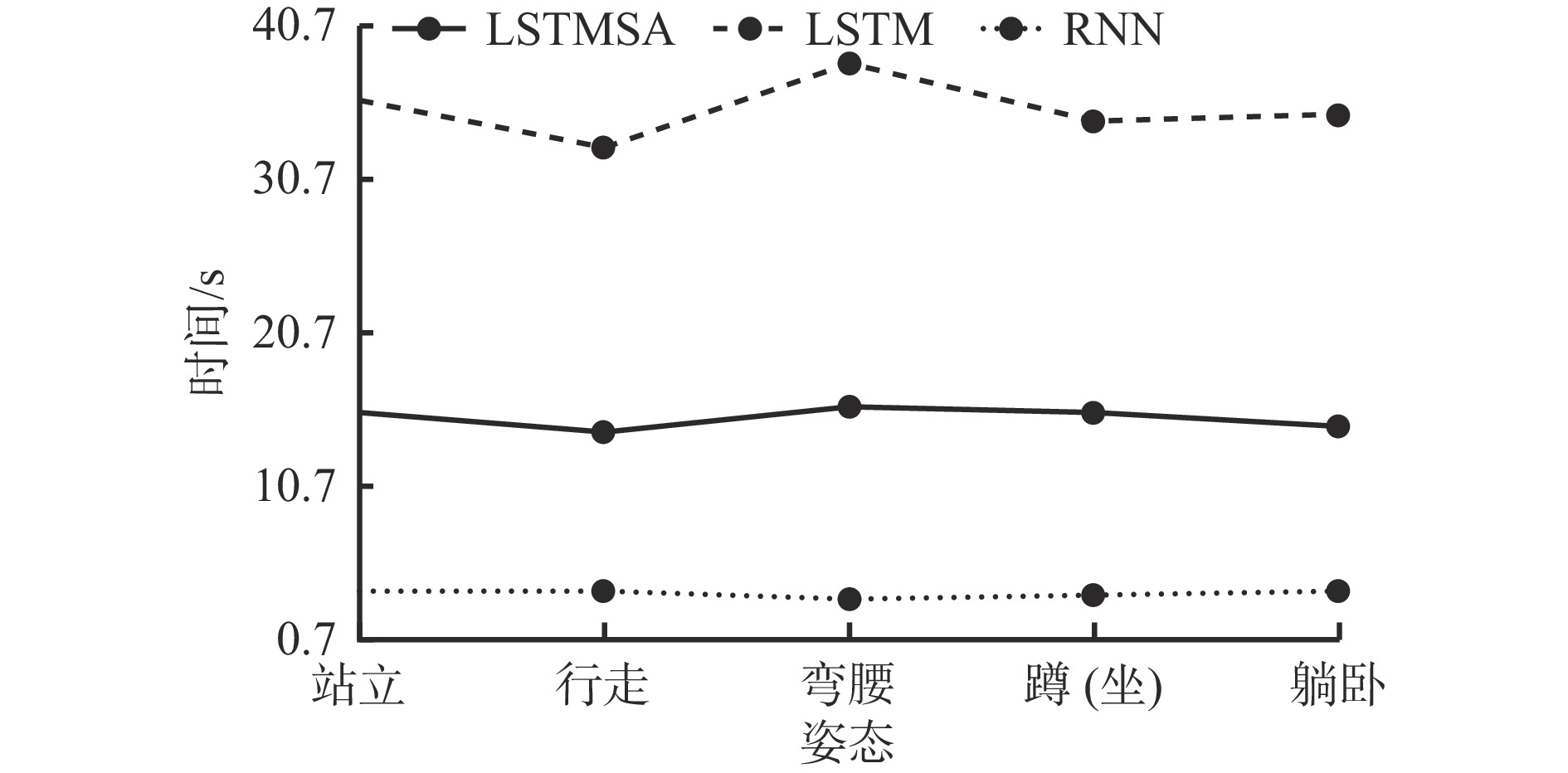
表 5 RNN人体姿态检测结果Table 5. Human posture detection results of recursive neural network(RNN)指标 姿态 站立 行走 弯腰 蹲(坐) 躺卧 检测为站立组数 1 731 237 61 60 29 检测为行走组数 143 1 513 49 78 69 检测为弯腰组数 50 152 1 686 147 41 检测为蹲(坐)组数 35 57 129 1 663 124 检测为躺卧组数 41 41 75 52 1 737 准确率/% 86.55 75.65 84.3 83.15 86.85 运算时间/s 3.78 3.86 3.29 3.54 3.72 算法运算时间通过边缘计算决策单元的定时器来计数,再根据处理器主频计算出实际运算时间。3种算法处理2 000组数据的平均运算时间如图5所示。可看出LSTM运算时间最长,达到32 s以上;RNN运算时间最短,不超过4 s;LSTMSA运算时间介于其他2种算法之间,较LSTM减少50%以上。
![]() 图 4 3种算法的人体姿态检测准确率对比Figure 4. Accuracy comparison of human posture detection by LSTMSA, LSTM and RNN
图 4 3种算法的人体姿态检测准确率对比Figure 4. Accuracy comparison of human posture detection by LSTMSA, LSTM and RNN![]() 图 5 3种算法检测人体姿态的运算时间对比Figure 5. Computing time comparison of human posture detection by LSTMSA, LSTM and RNN
图 5 3种算法检测人体姿态的运算时间对比Figure 5. Computing time comparison of human posture detection by LSTMSA, LSTM and RNN综合上述结果可知,LSTMSA对人体姿态检测的准确率达90%以上,且能够兼顾运算效率,可满足现场对人体姿态检测实时性和准确性的要求,具有可行性。
4. 结论
(1) 根据煤矿井下人员作业特点及对应姿态特征,将矿井人体姿态划分为站立、行走、弯腰、蹲(坐)、躺卧5种,并提出采用压力传感器和角度传感器获取人体姿态数据,通过便携式边缘运算决策单元进行姿态判别,构建了一种煤矿井下人体姿态检测方法。
(2) 提出了一种改进LSTM,即LSTMSA,采用SA对采样的原始人体姿态数据进行降维,以解决数据维度较大导致的运算效率低等问题,再将降维后的人体姿态数据输入LSTM进行姿态检测。
(3) 基于煤矿井下人体姿态检测方法设计了试验平台,在同一试验环境下分别对LSTMSA,LSTM,RNN进行测试,结果表明LSTMSA能够兼顾准确率和实时性,可用于矿井人体姿态检测。
(4) 基于LSTMSA的煤矿井下人体姿态检测方法在现场大规模应用前,还需进一步研究2个关键技术问题:① 目前只针对5种姿态进行检测,但井下作业人员姿态很多,特别是有代表危险行为的姿态,如跌倒、翻越等,姿态复杂且数据量大,需研究如何提高复杂场景下庞大时间序列数据的姿态检测准确率。② 若采用更复杂的硬件系统来提高姿态检测准确率,将导致系统功耗增大,而便携式边缘运算决策单元采用容量有限的电池供电,为保证其正常工作时间不低于48 h,需研究如何提高姿态检测算法的计算效率。
-
![]()
图 2 LSTMSA网络结构
Figure 2. Network structure of long short term memory sparse autoencoder (LSTMSA)
![]()
图 4 3种算法的人体姿态检测准确率对比
Figure 4. Accuracy comparison of human posture detection by LSTMSA, LSTM and RNN
![]()
图 5 3种算法检测人体姿态的运算时间对比
Figure 5. Computing time comparison of human posture detection by LSTMSA, LSTM and RNN
表 1 煤矿井下人体姿态分类
Table 1 Human posture classification in coal mine underground
姿态 描述 站立 默认初始状态,身体呈1条直线并直立 行走 双腿交替前移,在1个周期内呈现比较有规律的角度、幅度
变化,身体姿态基本直立弯腰 下半身肢体直立,上半身躯体弯曲,与下半身肢体呈一夹角 蹲(坐) 双腿弯曲,臀部、双腿和上身形成3个面,臀部与双腿和上身
呈一定角度;上半身可直立或前倾躺卧 身体呈1条直线并全身着地  下载: 导出CSV
下载: 导出CSV
表 2 人体姿态数据采样值定义
Table 2 Definition of sampled human posture data
数据采集装置 传感器名称 采样值符号 边缘运算决策单元 三轴角度传感器1
(输出三轴角度)X1(腰部x轴角度),X2(腰部
y轴角度),X3(腰部z轴角度)压力传感器(左脚,
含4个压力应变片)压力应变片1
(左脚脚尖)X4(左脚脚尖压力) 压力应变片2
(左脚内侧)X5(左脚内侧压力) 压力应变片3
(左脚外侧)X6(左脚外侧压力) 压力应变片4
(左脚脚跟)X7(左脚脚跟压力) 压力传感器(右脚,
含4个压力应变片)压力应变片5
(右脚脚尖)X8(右脚脚尖压力) 压力应变片6
(右脚内侧)X9(右脚内侧压力) 压力应变片7
(右脚外侧)X10(右脚外侧压力) 压力应变片8
(右侧脚跟)X11(右脚脚跟压力) 角度传感器
(左大腿)三轴角度传感器2
(输出三轴角度)X12(左腿x轴角度),X13(左腿
y轴角度),X14(左腿z轴角度)角度传感器
(右大腿)三轴角度传感器3
(输出三轴角度)X15(右腿x轴角度),X16(右腿
y轴角度),X17(右腿z轴角度)角度传感器
(左小腿)单轴角度传感器1
(输出一轴角度)X18(左小腿与左大腿夹角) 角度传感器
(右小腿)单轴角度传感器2
(输出一轴角度)X19(右小腿与右大腿夹角)
下载: 导出CSV
表 3 LSTMSA人体姿态检测结果
Table 3 Human posture detection results of LSTMSA
指标 姿态 站立 行走 弯腰 蹲(坐) 躺卧 检测为站立组数 1881 90 31 0 3 检测为行走组数 76 1 804 24 34 22 检测为弯腰组数 38 33 1 878 98 7 检测为蹲(坐)组数 3 61 62 1 854 43 检测为躺卧组数 2 12 5 14 1 925 准确率/% 94.05 90.2 93.9 92.7 96.25 运算时间/s 15.37 14.23 15.88 15.43 14.67
下载: 导出CSV
表 4 LSTM人体姿态检测结果
Table 4 Human posture detection results of long short-term memory(LSTM)
指标 姿态 站立 行走 弯腰 蹲(坐) 躺卧 检测为站立组数 1 875 105 60 11 2 检测为行走组数 83 1 789 29 22 13 检测为弯腰组数 26 57 1 866 92 12 检测为蹲(坐)组数 10 38 37 1 862 75 检测为躺卧组数 6 11 8 13 1 898 准确率/% 93.75 89.45 93.3 93.1 94.9 运算时间/s 35.74 32.69 38.12 34.4 34.89
下载: 导出CSV
表 5 RNN人体姿态检测结果
Table 5 Human posture detection results of recursive neural network(RNN)
指标 姿态 站立 行走 弯腰 蹲(坐) 躺卧 检测为站立组数 1 731 237 61 60 29 检测为行走组数 143 1 513 49 78 69 检测为弯腰组数 50 152 1 686 147 41 检测为蹲(坐)组数 35 57 129 1 663 124 检测为躺卧组数 41 41 75 52 1 737 准确率/% 86.55 75.65 84.3 83.15 86.85 运算时间/s 3.78 3.86 3.29 3.54 3.72
下载: 导出CSV
-
[1] 刘浩, 刘海滨, 孙宇, 等. 煤矿井下员工不安全行为智能识别系统研究[J/OL]. 煤炭学报: 1-13[2022-01-11]. DOI: 10.13225/j. cnki. jccs. 2021.0670. LIU Hao, LIU Haibin, SUN Yu, et al. Research on intelligent recognition system of unsafe behavior of coal mine underground employee[J/OL]. Journal of China Coal Society: 1-13 [2022-01-11]. DOI: 10.13225/j.cnki. jccs. 2021.0670.
[2] BOURDEV L, MAJI S, BROX T, et al. Detecting people using mutually consistent poselet activations[C]//European Conference on Computer Vision, Marseille-France, 2010: 168-181.
[3] 郑莉莉,黄鲜萍,梁荣华. 基于支持向量机的人体姿态识别[J]. 浙江工业大学学报,2012,40(6):670-675,691. DOI: 10.3969/j.issn.1006-4303.2012.06.017 ZHENG Lili,HUANG Xianping,LIANG Ronghua. Human posture recognition method based on SVM[J]. Journal of Zhejiang University of Technology,2012,40(6):670-675,691. DOI: 10.3969/j.issn.1006-4303.2012.06.017
[4] 黄心汉,苏豪,彭刚,等. 基于卷积神经网络的目标识别及姿态检测[J]. 华中科技大学学报(自然科学版),2017,45(10):7-11. HUANG Xinhan,SU Hao,PENG Gang,et al. Object identification and pose detection based on convolutional neural network[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition),2017,45(10):7-11.
[5] 许志强. 基于深度学习的实时人体姿态估计系统[D].秦皇岛:燕山大学, 2019. XU Zhiqiang. Real-time human posture estimation system based on deep learning study[D]. Qinhuangdao: Yanshan University, 2019.
[6] 钱志华,高陈强,叶盛. 采用元学习的多场景教室学生姿态检测方法[J]. 西安电子科技大学学报(自然科学版),2021,48(5):58-67. QIAN Zhihua,GAO Chenqiang,YE Sheng. Method for detection of a student's pose in a multi-scene classroom based on meta-learning[J]. Journal of Xidian University(Natural Science),2021,48(5):58-67.
[7] SONG S K, JANG J, PARK S. A phone for human activity recognition using triaxial acceleration sensor[C]//Proceedings of the 26th IEEE International Conference on Consumer Electronics, Las Vegas, 2008: 117-124.
[8] 曹玉珍,蔡伟超,程旸. 基于MEMS加速度传感器的人体姿态检测技术[J]. 纳米技术与精密工程,2010,8(1):37-41. DOI: 10.3969/j.issn.1672-6030.2010.01.008 CAO Yuzhen,CAI Weichao,CHENG Yang. Body posture detection technique based on MEMS acceleration sensor[J]. Nanotechlogy and Precision Engineering,2010,8(1):37-41. DOI: 10.3969/j.issn.1672-6030.2010.01.008
[9] STAMATAKIS J,CREMERS J,MAQUET D,et al. Gait feature extraction in Parkinson's disease using low-cost accelerometers[J]. Conference of the IEEE Engineering in Medicine and Biology Society,Boston,2011:7900-7903.
[10] 陈超强,蒋磊,王恒. 基于SAE和LSTM的下肢外骨骼步态预测方法[J]. 计算机工程与应用,2019,55(12):110-116,154. DOI: 10.3778/j.issn.1002-8331.1811-0315 CHEN Chaoqiang,JIANG Lei,WANG Heng. Gait prediction method of lower extremity exoskeleton based on SAE and LSTM neural network[J]. Computer Engineering and Applications,2019,55(12):110-116,154. DOI: 10.3778/j.issn.1002-8331.1811-0315
[11] 李海涛. 基于ARM9和RFID的井下人员定位系统研究与设计[D]. 武汉: 武汉理工大学, 2010. LI Haitao. Research and design of underground personnel positioning system based on ARM9 and RFID [D]. Wuhan: Wuhan University of Technology, 2010.
[12] 叶锦娇,温良,王红尧,等. 下井人员生命体征传感器的设计[J]. 工矿自动化,2013,39(1):52-54. DOI: 10.7526/j.issn.1671-251X.2013.01.014 YE Jinjiao,WEN Liang,WANG Hongyao,et al. Design of vital signs sensor for coal miner[J]. Industry and Mine Automation,2013,39(1):52-54. DOI: 10.7526/j.issn.1671-251X.2013.01.014
[13] 罗会兰,王婵娟,卢飞. 视频行为识别综述[J]. 通信学报,2018,39(6):169-180. LUO Huilan,WANG Chanjuan,LU Fei. Survey of video behavior recognition[J]. Journal on Communications,2018,39(6):169-180.
[14] 柴铎,徐诚,何杰,等. 运用开端神经网络进行人体姿态识别[J]. 通信学报,2017,38(增刊2):122-128. CHAI Duo,XU Cheng,HE Jie,et al. Inception neural network for human activity recognition using wearable sensor[J]. Journal on Communications,2017,38(S2):122-128.
[15] REN Shaoqing,HE Kaiming,GIRSHICK R,et al. Faster R-CNN:towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2017,39(6):1127-1149.
-
期刊类型引用(6)
1. 蒋博文,张若楠,徐平安,谢玉麒. 基于YOLOv5的煤矿井下瓦斯钻杆智能识别方法. 现代信息科技. 2025(06): 142-145 .  百度学术
百度学术
2. 马天,姜梅,杨嘉怡,张杰慧,丁旭涵. 基于多特征融合时差网络的带式输送机区域违规行为识别. 工矿自动化. 2024(07): 115-122 . 本站查看
3. 陈贤,周澍,张蓉. 一种井下人员乘车识别与定位方法. 煤矿安全. 2024(11): 217-221 . 百度学术
4. 丁静怡,王凌霄,袁竞峰,薛竣. 基于目标识别与姿态检测的套筒灌浆过程监测方法. 土木工程与管理学报. 2023(01): 136-144 . 百度学术
5. 胡文渊,翟雨生,贠瑞光,宋相坤,尹玉玺. 我国井下不安全行为视觉检测方法研究综述与展望. 煤矿机电. 2023(01): 1-7 . 百度学术
6. 饶天荣,潘涛,徐会军. 基于交叉注意力机制的煤矿井下不安全行为识别. 工矿自动化. 2022(10): 48-54 . 本站查看
其他类型引用(2)








计量
- 文章访问数: 200
- HTML全文浏览量: 213
- PDF下载量: 56
- 被引次数: 8
