邮件订阅
RSS
所有
标题
作者
关键字
高级检索+
首页
本刊简介
期刊简介
期刊荣誉
历史与变更
人员简介
编委会
出版伦理
开放获取
投稿须知
期刊订阅
下载中心
联系我们
English
所有
标题
作者
关键词
摘要
DOI
栏目
年
地址
基金
中图分类号
首页
本刊简介
期刊简介
期刊荣誉
历史与变更
人员简介
编委会
出版伦理
开放获取
投稿须知
期刊订阅
下载中心
联系我们
English
下载:
全尺寸图片
幻灯片
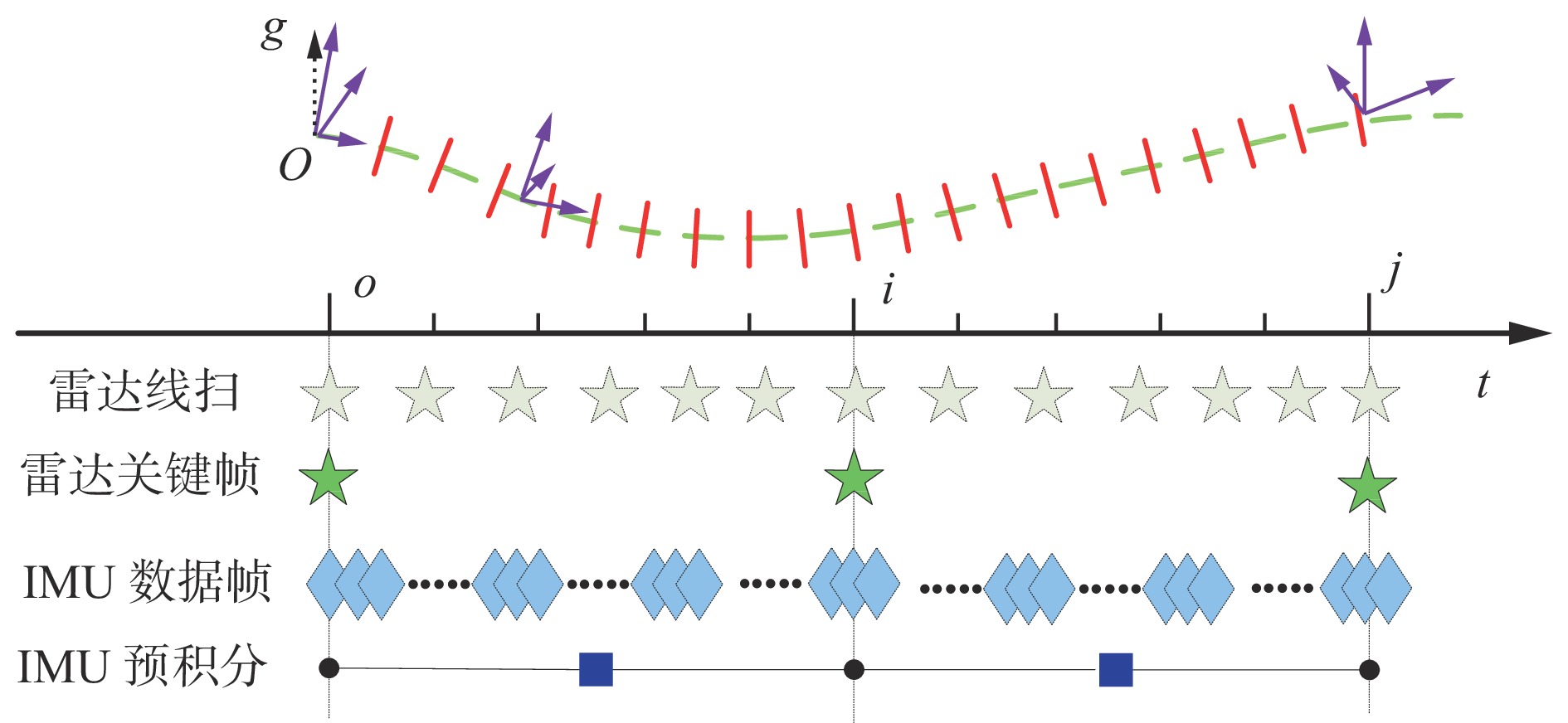
预积分原理
2022, 48(12): 68-78.
煤矿移动机器人LiDAR/IMU紧耦合SLAM方法 .
本文全文图片
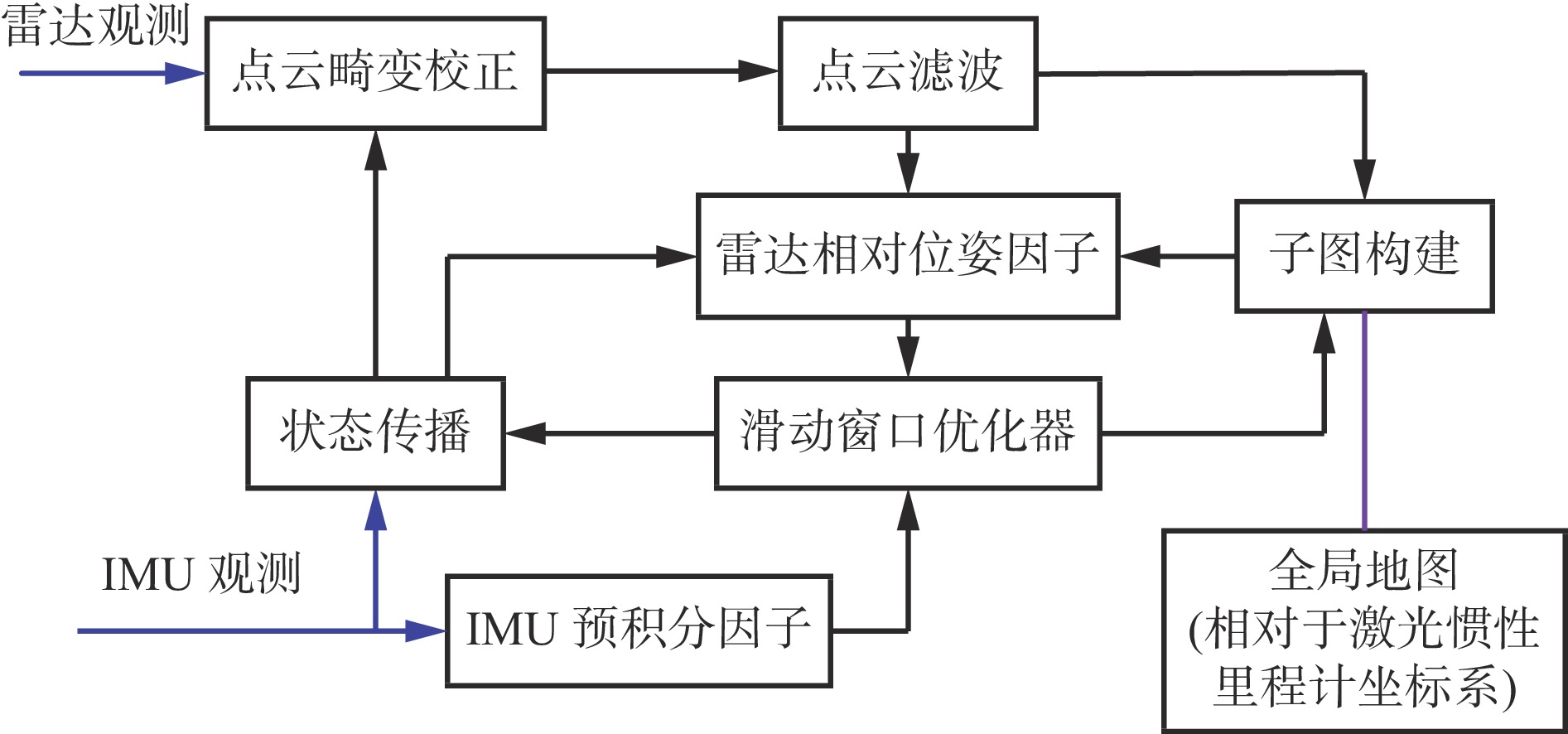
LI−SLAM方法框架
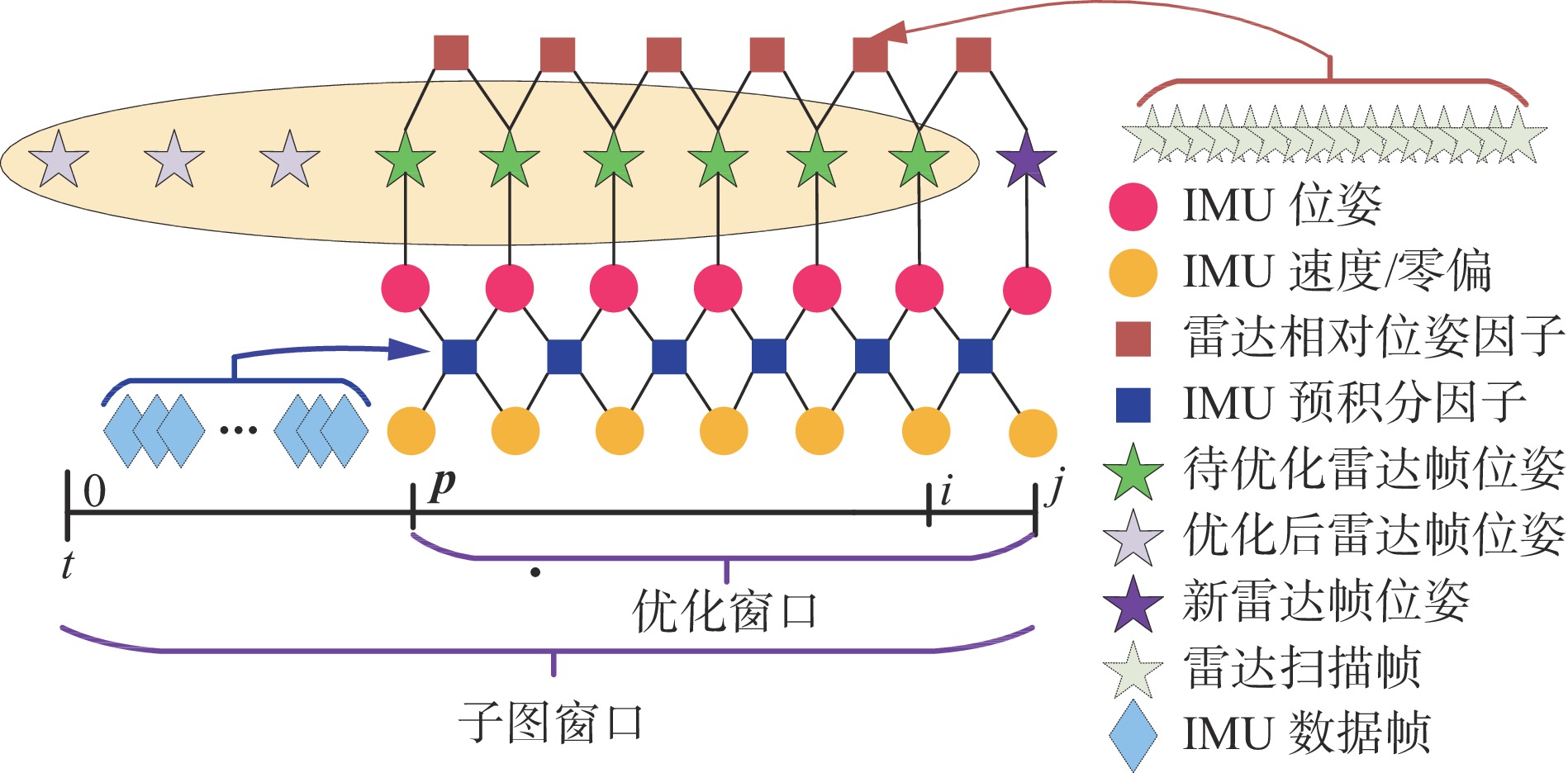
因子图模型
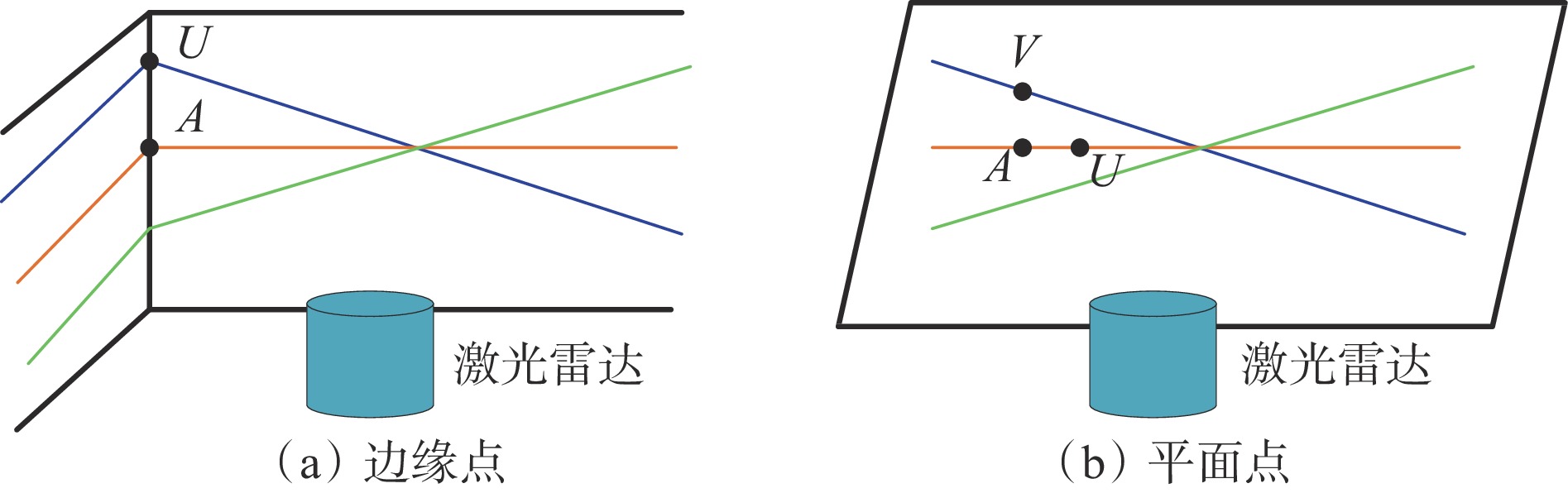
2类特征点数据关联方法
预积分原理
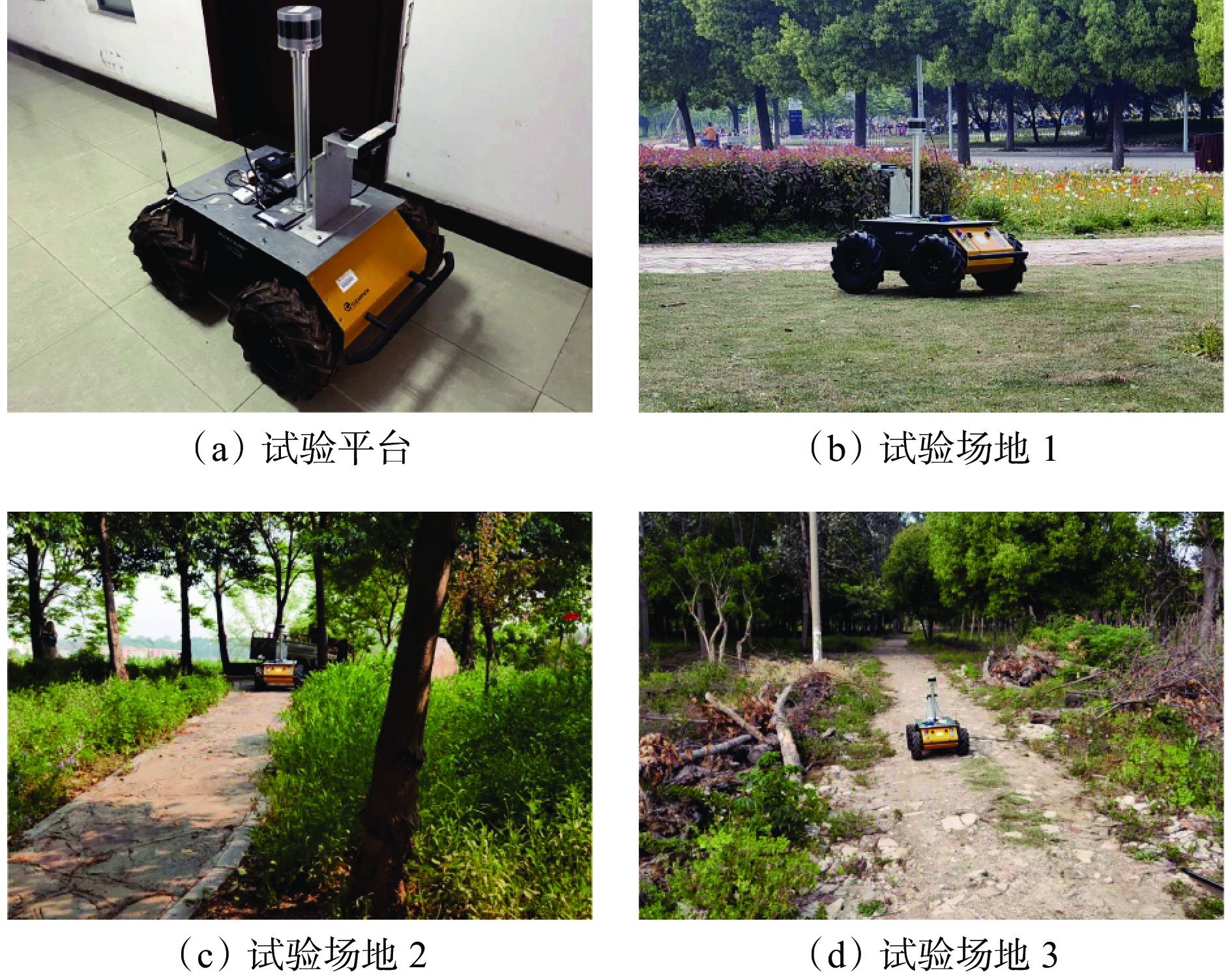
轮式移动机器人试验平台及野外试验场地
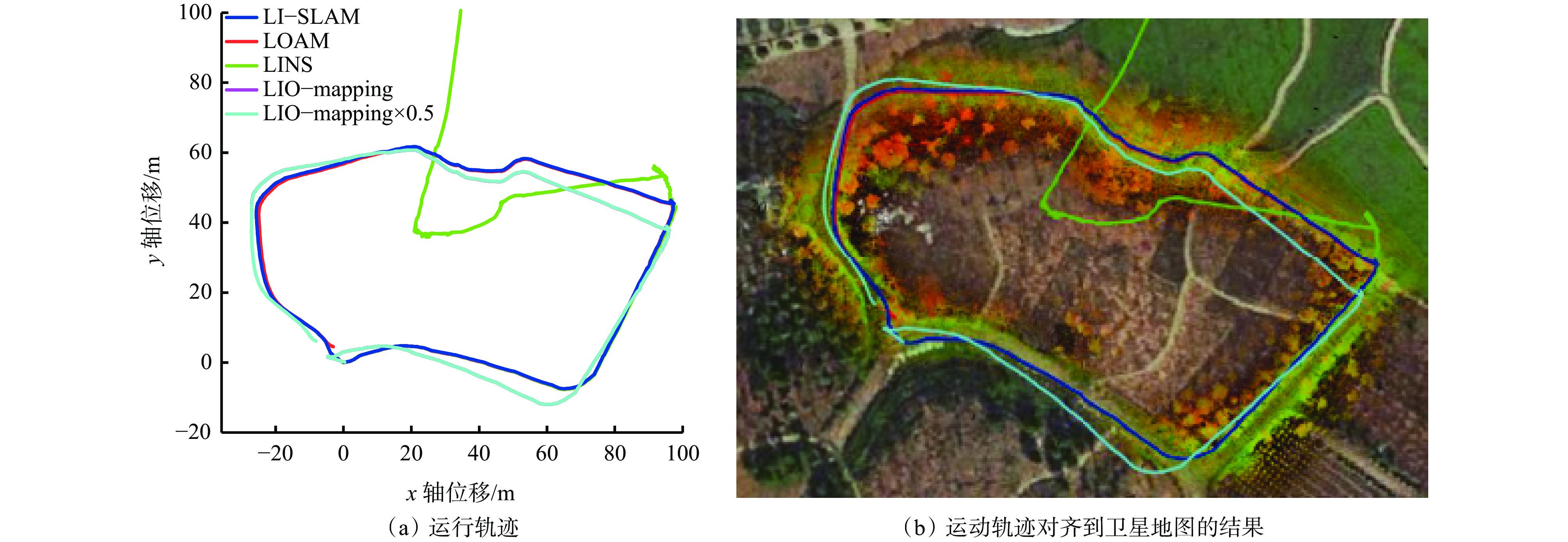
试验场地1中各种方法的运行轨迹
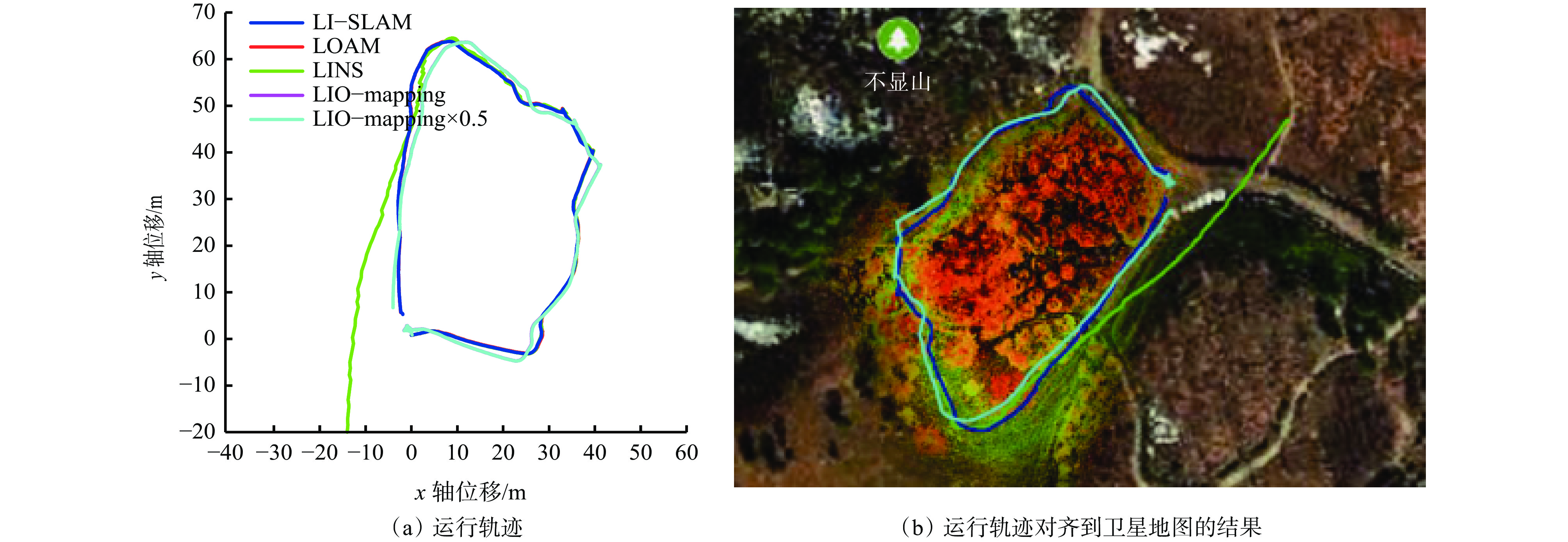
试验场地2中各种方法的运行轨迹
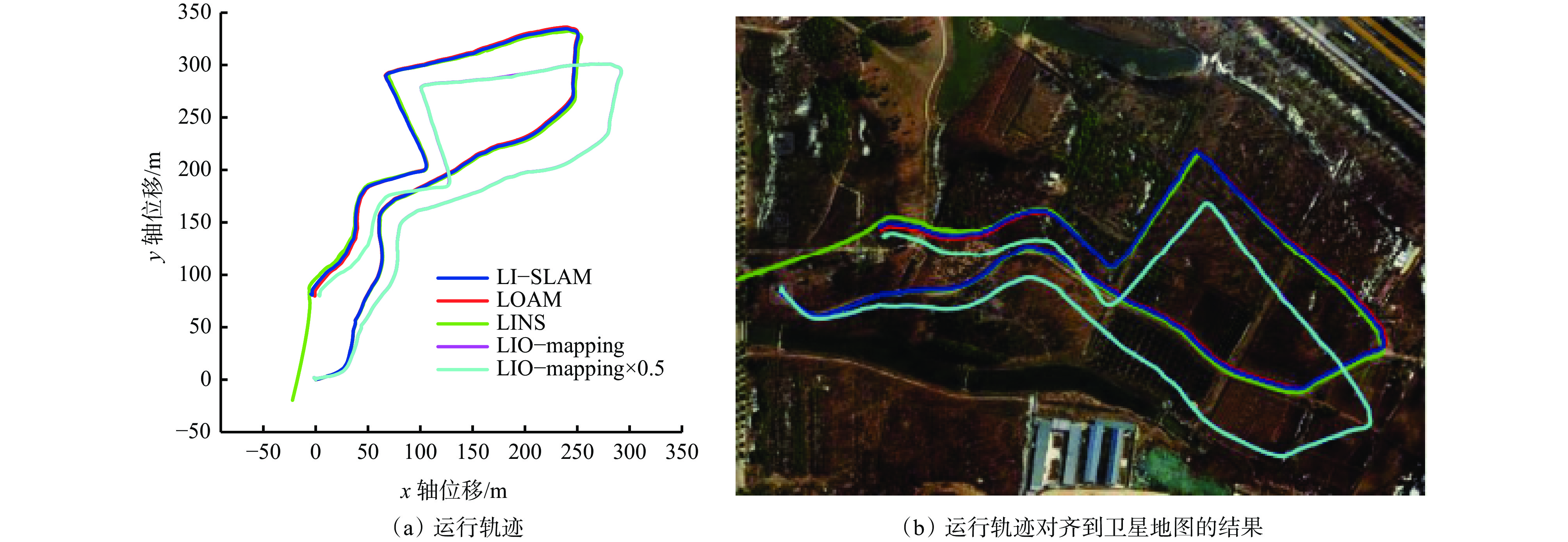
试验场地3中各种方法的运行轨迹
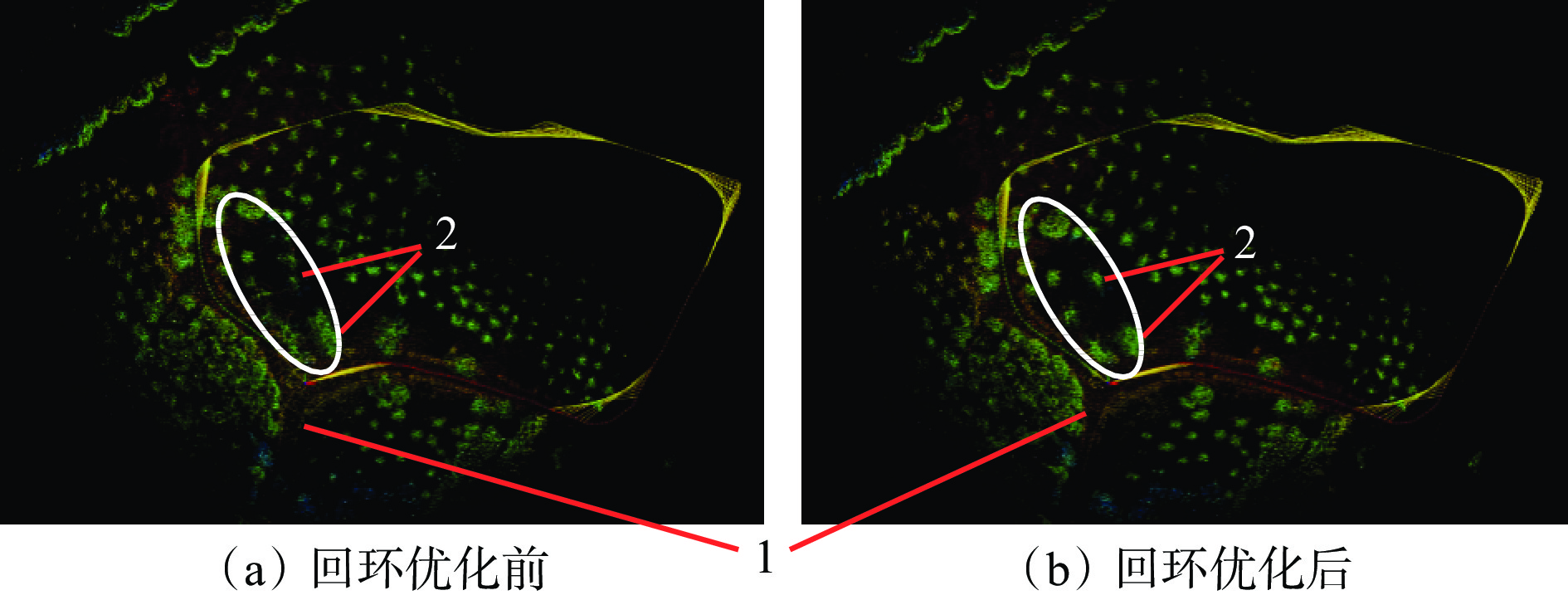
回环优化效果
地下车库环境及机器人平台
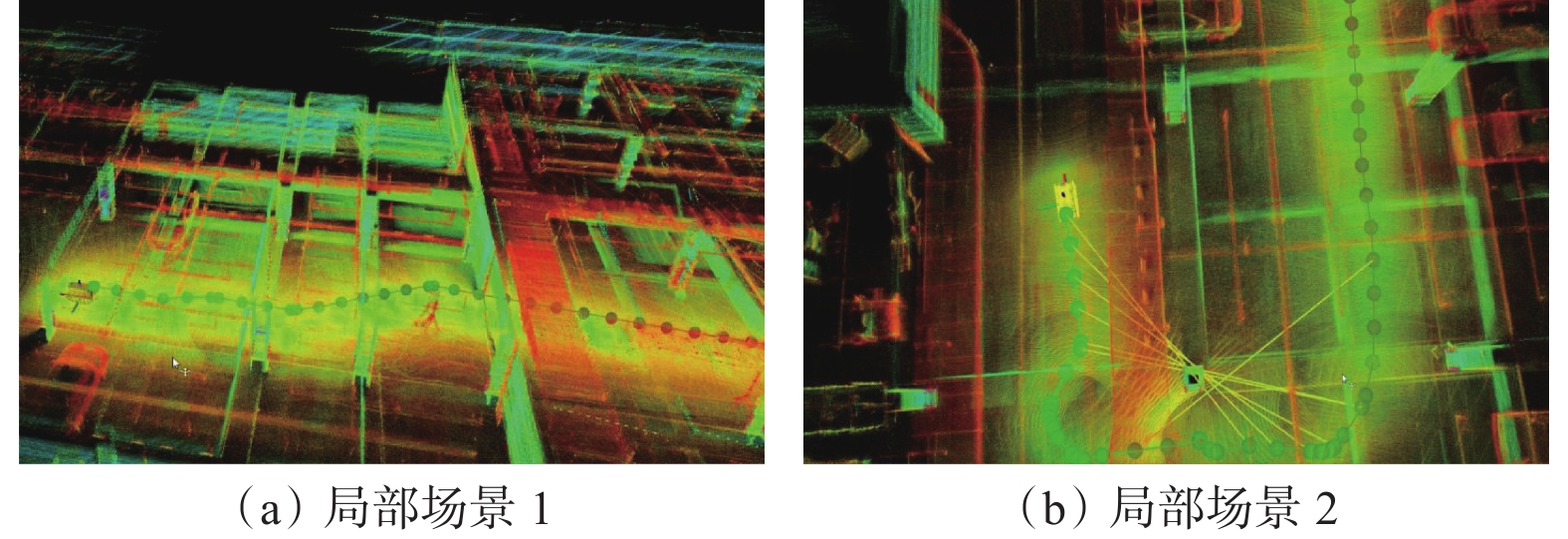
LI−SLAM方法在地下车库建模效果
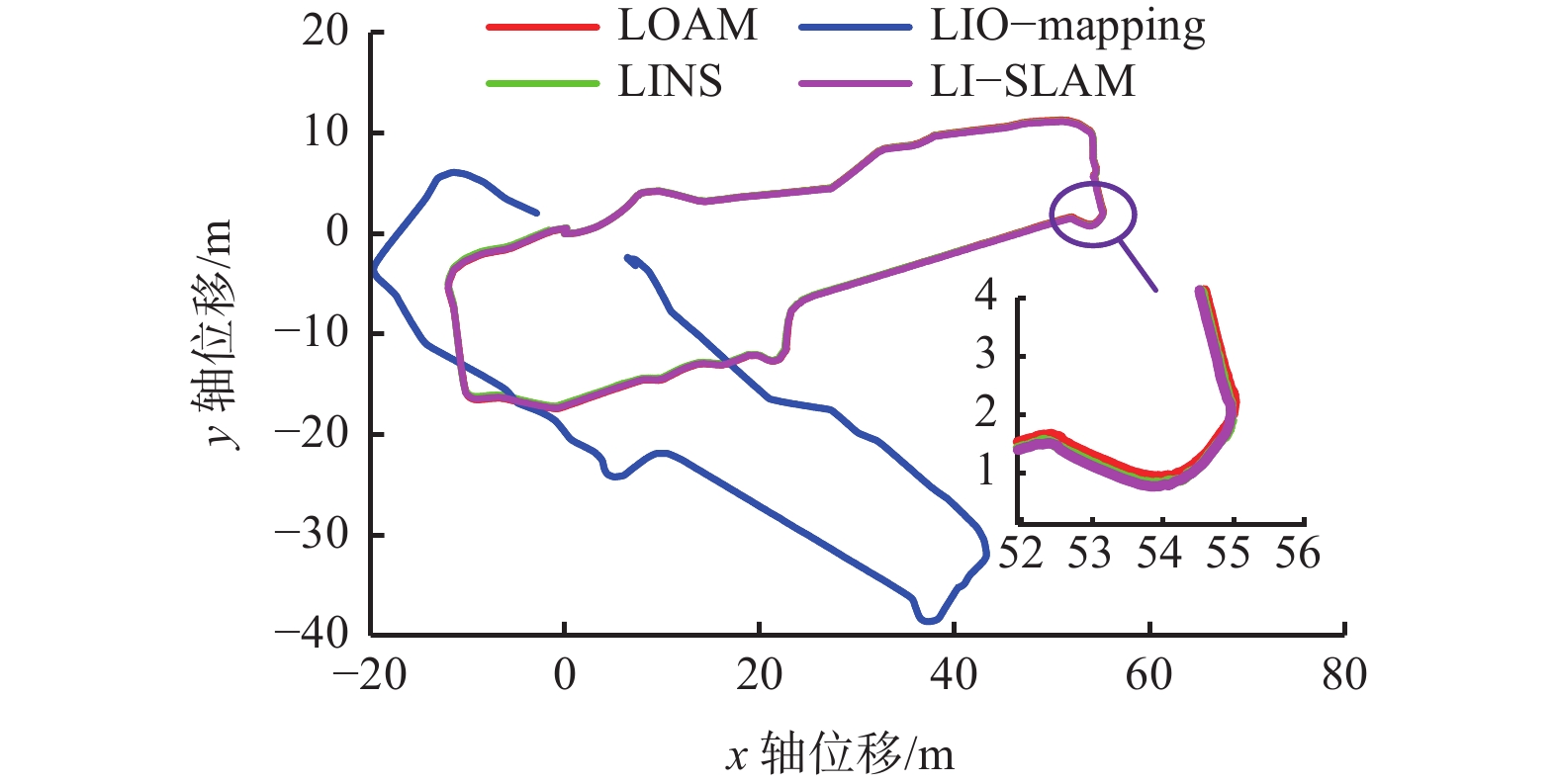
不同方法轨迹对比
煤矿井下现场试验
机器人在井下各类复杂环境中运行情况
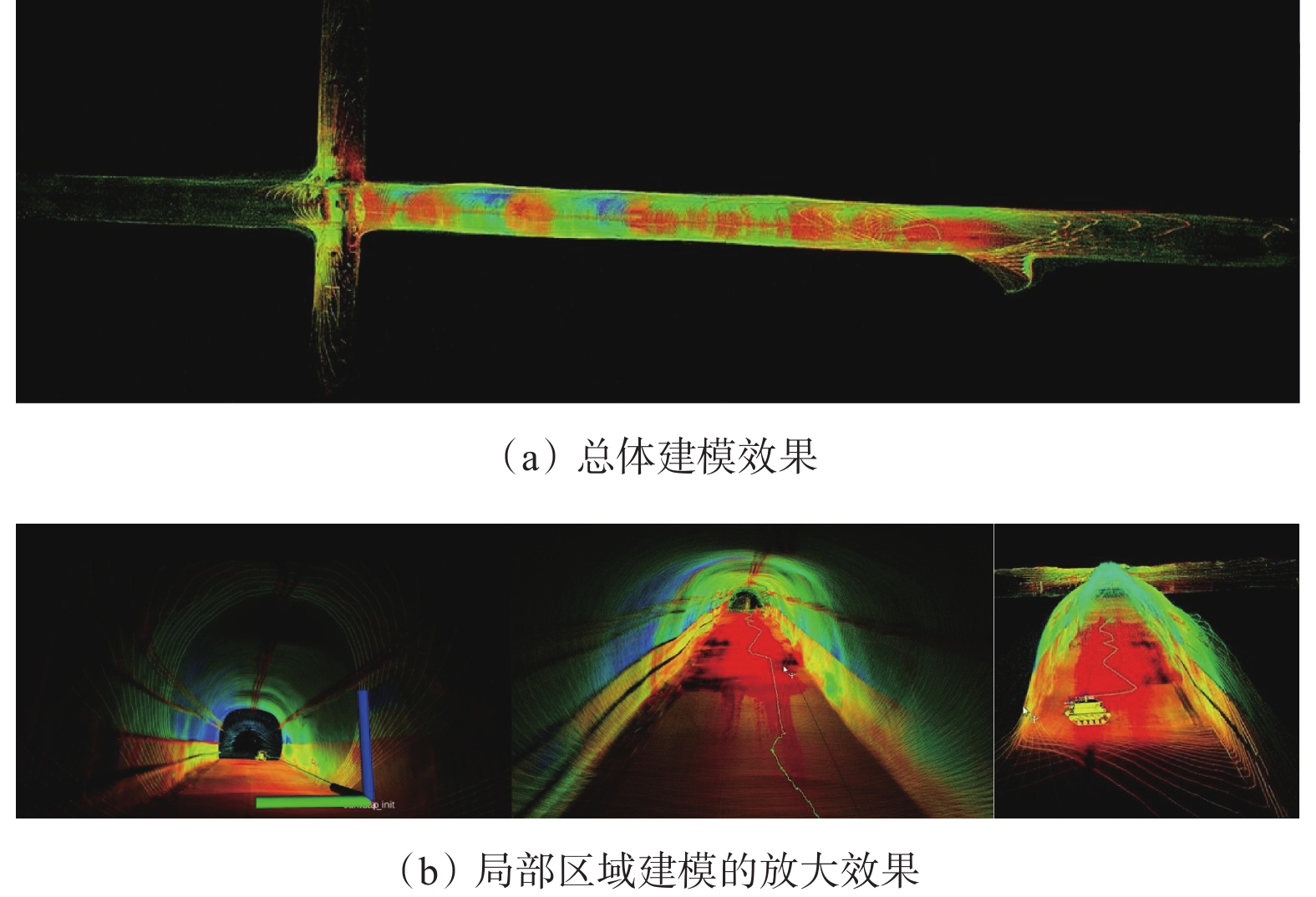
煤矿井下建模效果
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
EndNote
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式

 下载:
下载: