Coal mine roadway environment-oriented LiDAR and IMU fusion positioning and mapping method
-
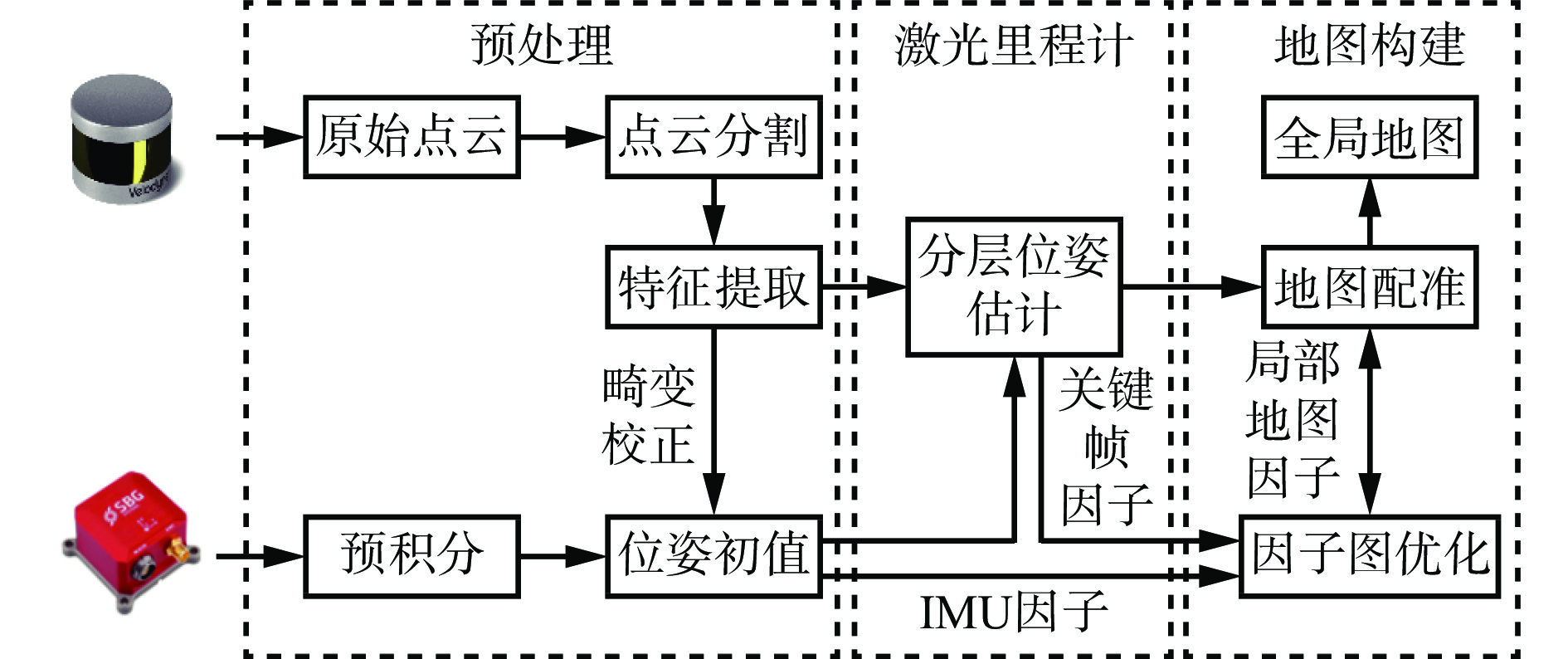
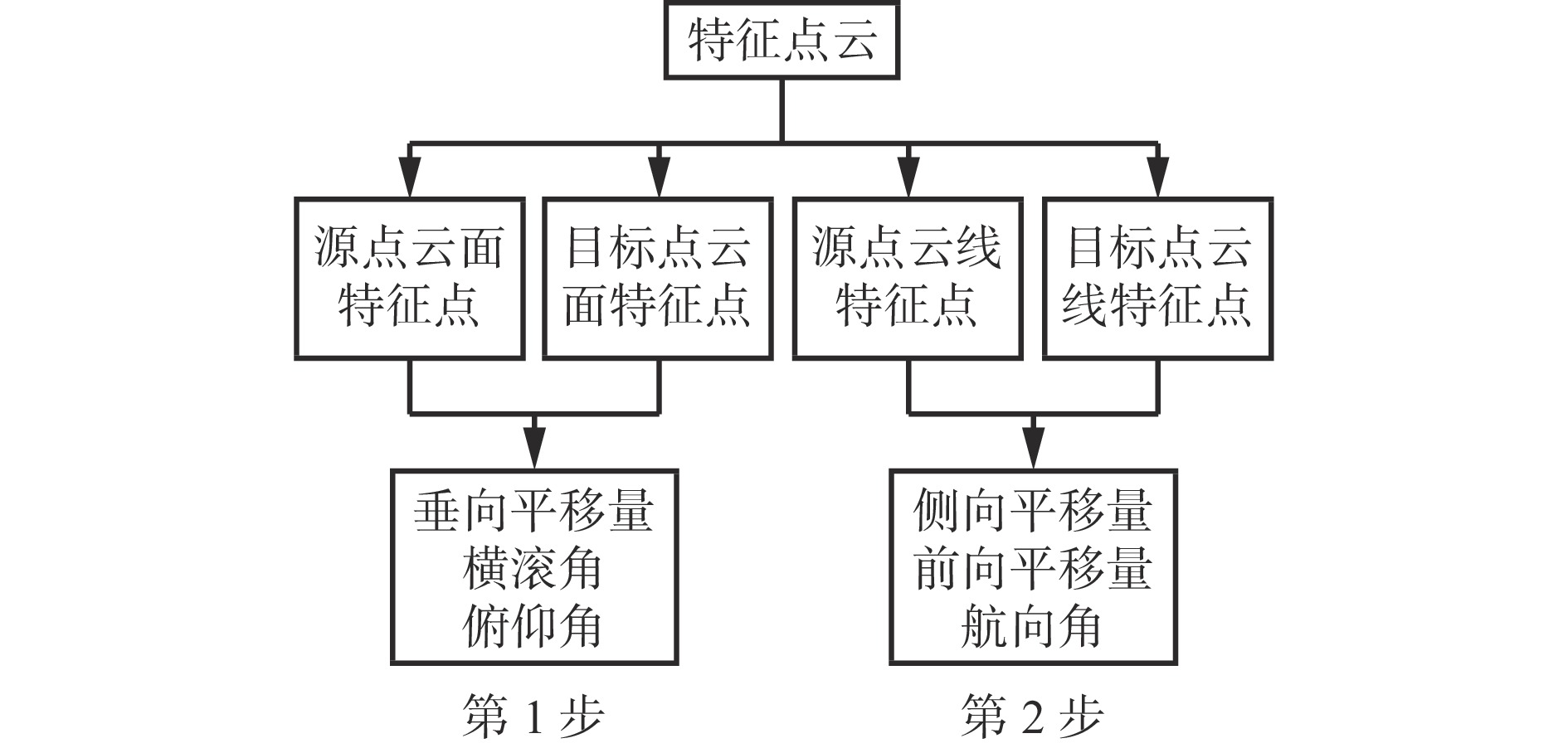
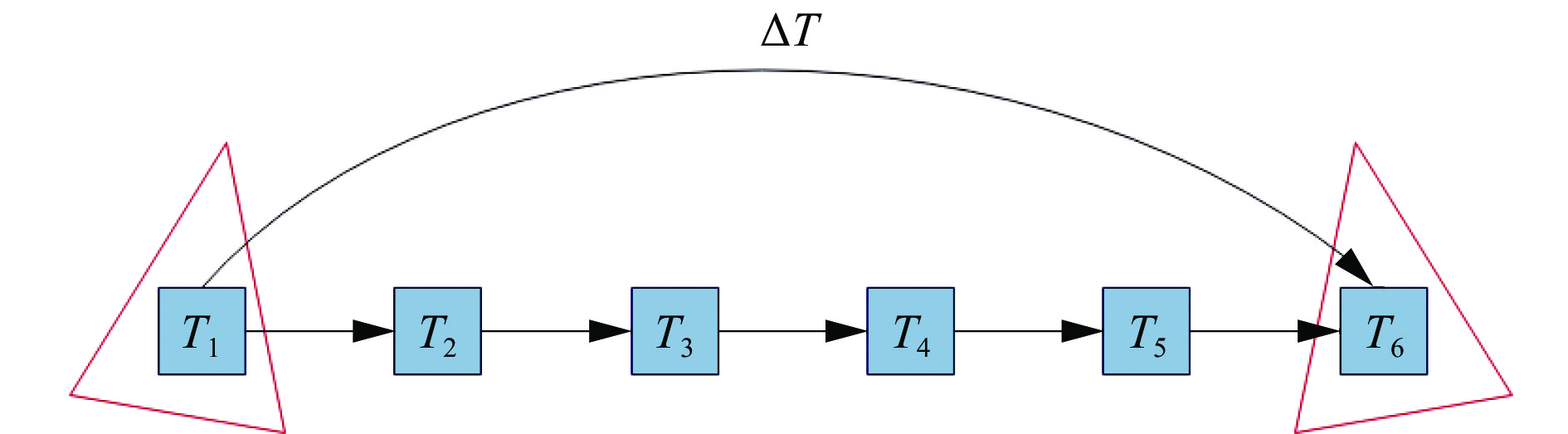
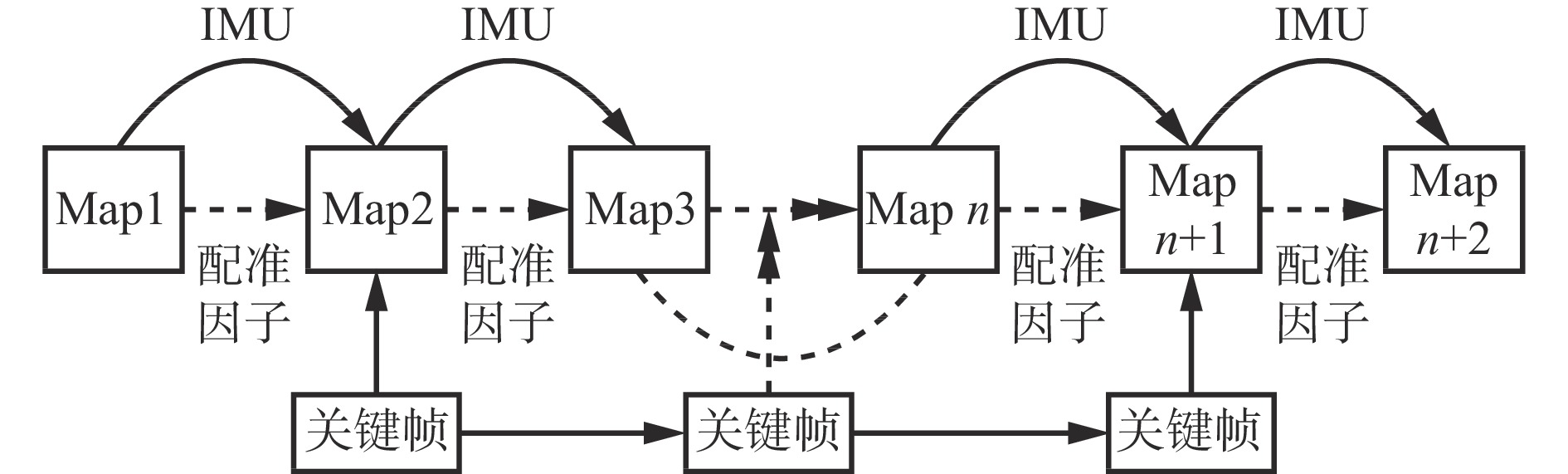
摘要: 针对煤矿井下喷浆表面、对称巷道等引起移动机器人自主导航定位与建图失效问题,提出了一种面向煤矿巷道环境的激光雷达(LiDAR)与惯性测量单元(IMU)融合的实时定位与建图方法。首先对原始点云进行分割,利用IMU预积分位姿去除原始点云非线性运动畸变,并对得到的点云进行线、面特征提取。然后将相邻帧的线、面特征进行匹配,在分层位姿估计过程中融合IMU预积分所得到的位姿初值,减少计算迭代次数,提高特征点匹配的精度,解算出当前帧的位姿。最后向因子图中插入局部地图因子、IMU因子、关键帧因子,对位姿进行优化约束,对关键帧与局部地图进行匹配,通过八叉树结构实现地图构建。为验证所提方法的定位性能与建图效果,搭建了Autolabor 、VLP−16 LiDAR和Ellipse−N IMU的实验平台进行验证,并与LeGO−LOAM、LIO−SAM方法进行定性定量对比分析。结果表明:① 在煤矿巷道环境中,面向煤矿巷道环境的LiDAR与IMU融合的实时定位与建图方法三轴方向的绝对定位误差的均值和中值均小于32 cm;对X轴的位姿估计精度最高,其累计误差为1.65 m,位置偏差为2.97 m,建图效果整体良好,建图轨迹未发生漂移;构建的点云地图在完整性和几何结构真实性方面均有着优秀的表现,可以直观反映巷道环境的实际情况,具有良好的鲁棒性。这是因为点云匹配之后进行了分层位姿估计,多因子优化可有效降低全局累计误差,对轨迹精度和地图的一致性提升具有重要作用。② 在楼道走廊环境中,面向煤矿巷道环境的LiDAR与IMU融合的实时定位与建图方法三轴的误差均小于1.01 m,误差均值为5~15 cm,误差范围小,精度高;累计位置偏差仅为1.67 m;完整性与环境匹配均有良好的性能。这是由于通过增加关键帧因子,插入因子图对其新增节点相关变量进行优化,降低了位姿估计漂移,定位与建图精度相对较高。Abstract: The failure of autonomous navigation, positioning and mapping of the mobile robot is caused by the shotcrete surface and symmetrical roadway in coal mine. In order to solve this problem, a real-time positioning and mapping method based on LiDAR and IMU fusion is proposed for the roadway environment in the coal mine. Firstly, the original point cloud is segmented. The IMU pre-integration pose is used to remove the nonlinear motion distortion of the original point cloud. The line and surface feature extraction is carried out on the obtained point cloud. Secondly, the line and surface features of adjacent frames are matched. The initial pose value obtained by IMU pre-integration is fused in the hierarchical pose estimation process. The calculation iteration times are reduced, the matching precision of feature points is improved, and the pose of the current frame is solved. Finally, the local map factor, IMU factor and key frame factor are inserted into the factor graph to optimize and constrain the pose. The key frame is matched with the local map, and the map construction is realized through an octree structure. In order to verify the positioning performance and mapping effect of the proposed method, the experimental platforms of Autolabor, VLP-16 LiDAR and Ellipse-N IMU are built. The qualitative and quantitative comparison between the proposed method and LeGO-LOAM and LIO-SAM methods is carried out. The results show the following points. ① In the coal mine roadway environment, the average and median of the absolute positioning error in the three axes direction of the real-time positioning and mapping method based on LiDAR and IMU fusion are less than 32 cm. The position and attitude estimation precision in the X-axis is the highest, with a cumulative error of 1.65 m and a position deviation of 2.97 m. The overall mapping effect is good, and the mapping track does not drift. The point cloud map constructed has excellent performance in integrity and geometric structure authenticity. The map can directly reflect the actual situation of the roadway environment, and has good robustness. This is because hierarchical pose estimation is performed after point cloud matching. The multi-factor optimization can effectively reduce the global cumulative error, which plays an important role in improving track precision and map consistency. ② In the corridor environment, the three-axis error of the real-time positioning and mapping method based on LiDAR and IMU fusion for the coal mine roadway environment is less than 1.01 m. The average error is 5~15 cm, with small error range and high precision. The accumulated position deviation is only 1.67 m. Integrity and environment matching have good performance. This is because by adding keyframe factors and inserting factor graphs to optimize the related variables of the newly added nodes, the drift of pose estimation is reduced. The positioning and mapping precision is relatively high.
-
-
![]()
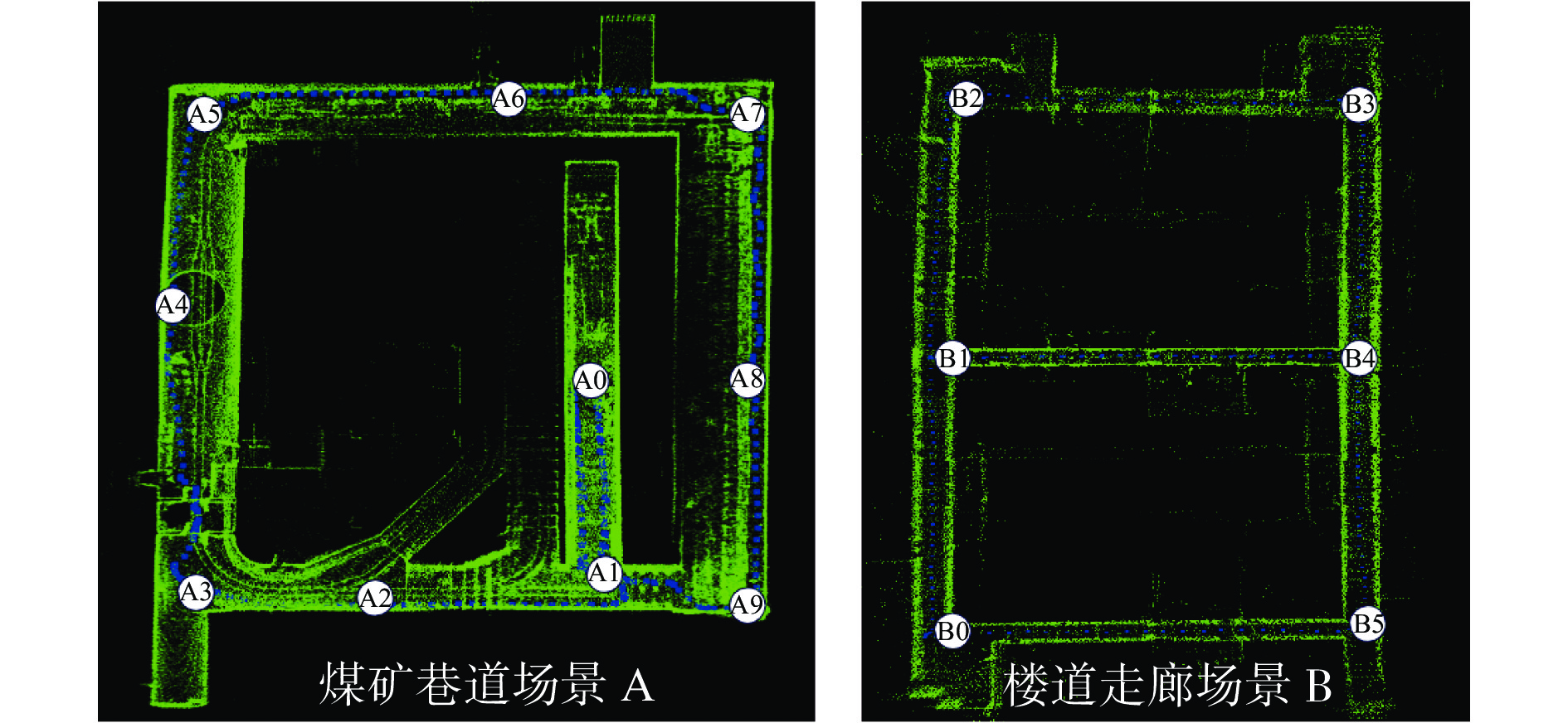
图 6 场景A(参考点A0—A9)和场景B(参考点B0—B5)的坐标真值
Figure 6. Coordinate ture value of scenario A (reference points A0-A9) and scenario B (reference points B0-B5)
![]()
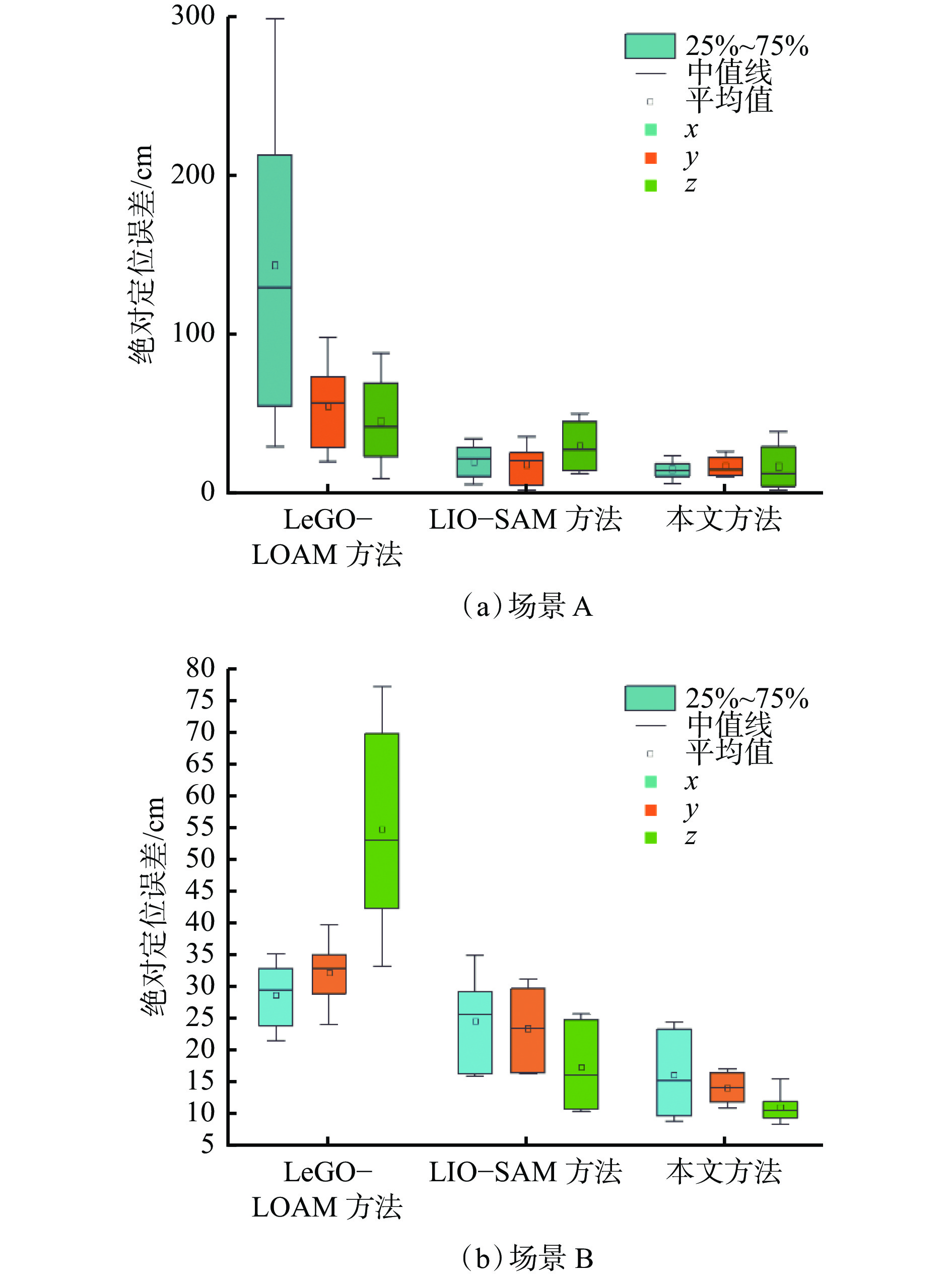
图 7 场景A、B的绝对定位误差分布
Figure 7. Absolute positioning error distribution of scenarios A and B
![]()
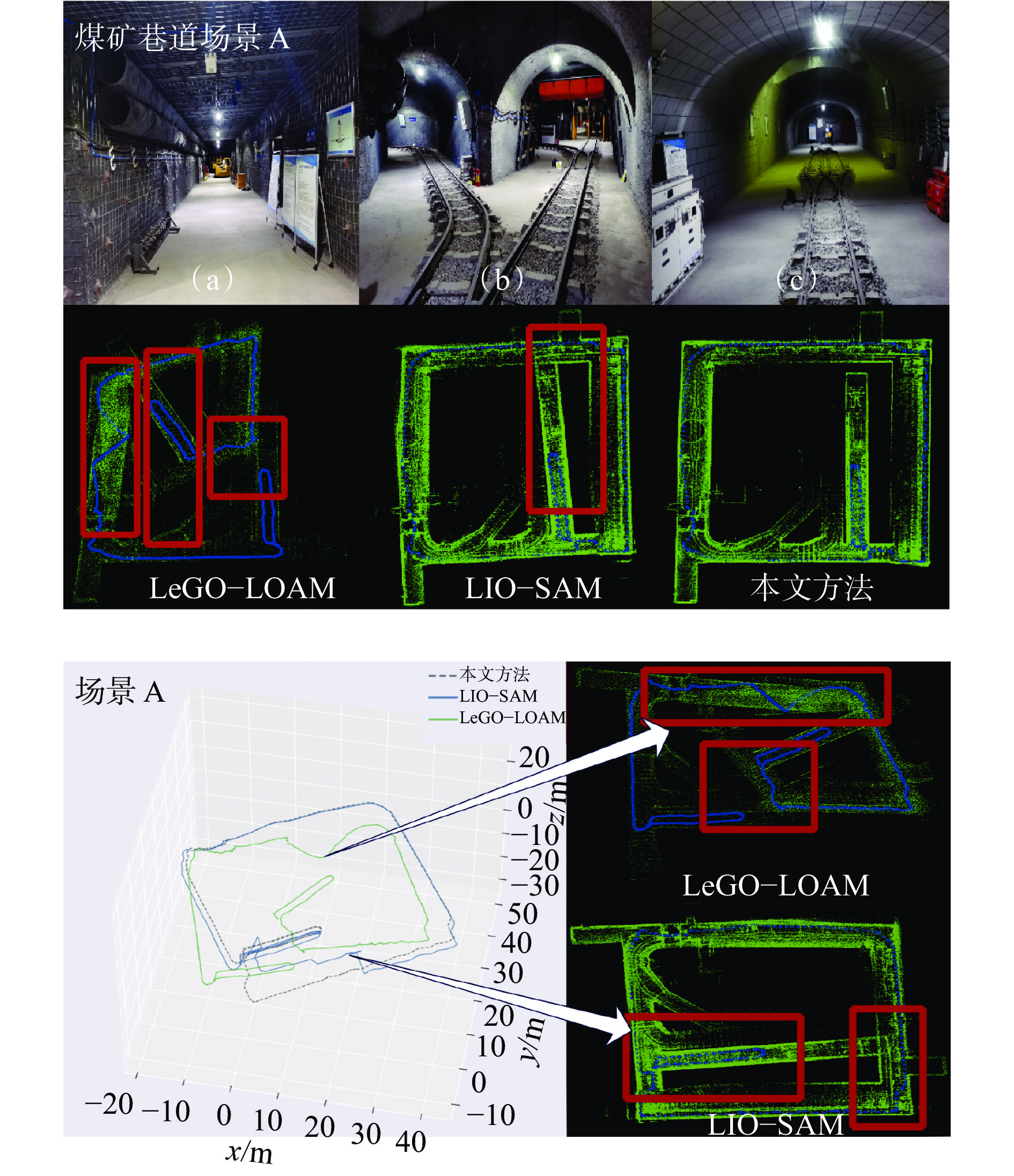
图 8 煤矿巷道场景A 中3种方法建图结果与轨迹
Figure 8. Mapping results and tracks of three methods in coal mine roadway scenarios A
![]()
图 9 楼道走廊场景B中3种方法建图结果与轨迹
Figure 9. Mapping results and tracks of three methods in corridor scenarios B
表 1 实测数据
Table 1 Measured data
数据集 地物
类型移动
目标轨迹
长度/m高差/cm 最大位移
速度/(m·s−1)煤矿巷道A 防护装置 无 279 15 0.8 楼道走廊B 室内建筑 少量 221 10 1.5  下载: 导出CSV
下载: 导出CSV
表 2 3种方法的累计误差
Table 2 Cumulative error of there methods
场景 方法 ΔX/m ΔY/m ΔZ/m 位置
偏差/mA LeGO−LOAM 13.10 16.56 44.39 49.16 LIO−SAM 2.10 1.88 3.04 4.15 本文方法 1.65 1.75 1.74 2.97 B LeGO−LOAM 1.42 1.13 2.33 2.95 LIO−SAM 2.21 3.15 1.05 3.99 本文方法 0.94 0.94 1.01 1.67
下载: 导出CSV
-
[1] 文虎,刘洋,郑学召,等. 矿山救援机器人群设计[J]. 工矿自动化,2019,45(9):34-39. DOI: 10.13272/j.issn.1671-251x.17476 WEN Hu,LIU Yang,ZHENG Xuezhao,et al. Design of mine rescue robot group[J]. Industry and Mine Automation,2019,45(9):34-39. DOI: 10.13272/j.issn.1671-251x.17476
[2] 翟国栋,任聪,王帅,等. 多尺度特征融合的煤矿救援机器人目标检测模型[J]. 工矿自动化,2020,46(11):54-58. DOI: 10.13272/j.issn.1671-251x.2020050033 ZHAI Guodong,REN Cong,WANG Shuai,et al. Object detection model of coal mine rescue robot based on multi-scale feature fusion[J]. Industry and Mine Automation,2020,46(11):54-58. DOI: 10.13272/j.issn.1671-251x.2020050033
[3] 孙金礼,陈杰. 煤矿井下巷道贯通测量精度分析及技术方法[J]. 煤炭科学技术,2010,38(6):112-114,66. DOI: 10.13199/j.cst.2010.06.72.sunjl.025 SUN Jinli,CHEN Jie. Analysis and technical method of linkage survey accruacy for underground mine roadway[J]. Coal Science and Technology,2010,38(6):112-114,66. DOI: 10.13199/j.cst.2010.06.72.sunjl.025
[4] 胡建胜. 煤矿全站仪导线测量误差分析及技术措施研究[J]. 能源技术与管理,2018,43(4):170-172. DOI: 10.3969/j.issn.1672-9943.2018.04.070 HU Jiansheng. Study on error analysis and technical measures of total station traverse measurement in coal mine[J]. Energy Technology and Management,2018,43(4):170-172. DOI: 10.3969/j.issn.1672-9943.2018.04.070
[5] LI D,YAO Yuan,SHAO Zhenfeng,et al. From digital earth to smart earth[J]. Chinese Science Bulletin,2014,59(8):722-733. DOI: 10.1007/s11434-013-0100-x
[6] 蒋萍. LiDAR/IMU组合导航定位算法研究[D]. 南昌: 南昌大学, 2021. JIANG Ping. Research on LiDAR/IMU integrated navigation and positioning algorithm[D]. Nanchang: Nanchang University, 2021.
[7] CHEN Chi,YANG Bisheng,TIAN Mao,et al. Automatic registration of vehicle-borne mobile mapping laser point cloud and sequent panoramas[J]. Acta Geodaetica et Cartographica Sinica,2018,47(2):215.
[8] 陈先中,刘荣杰,张森,等. 煤矿地下毫米波雷达点云成像与环境地图导航研究进展[J]. 煤炭学报,2020,45(6):2182-2192. DOI: 10.13225/j.cnki.jccs.zn20.0316 CHEN Xianzhong,LIU Rongjie,ZHANG Sen,et al. Development of millimeter wave radar imaging and SLAM in underground coal mine environment[J]. Journal of China Coal Society,2020,45(6):2182-2192. DOI: 10.13225/j.cnki.jccs.zn20.0316
[9] DEBEUNNE C,VIVET D. A review of visual-LiDAR fusion based simultaneous localization and mapping[J]. Sensors(Basel,Switzerland),2020,20(7):2068.
[10] CADENA C,CARLONE L,CARRILLO H,et al. Past,present,and future of simultaneous localization and mapping:toward the robust-perception age[J]. IEEE Transactions on Robotics,2016,32(6):1309-1332. DOI: 10.1109/TRO.2016.2624754
[11] 种一帆,冀杰,宫铭钱,等. 半直接法与IMU融合的双目视觉里程计[J]. 西南师范大学学报(自然科学版),2021,46(2):112-120. CHONG Yifan,JI Jie,GONG Mingqian,et al. A stereo visual odometry aided by IMU based on semi-direct method[J]. Journal of Southwest China Normal University(Natural Science Edition),2021,46(2):112-120.
[12] ZHANG Ji,SINGH S. Low-drift and real-time lidar odometry and mapping[J]. Autonomous Robots,2017,41(2):401-416. DOI: 10.1007/s10514-016-9548-2
[13] 周治国,曹江微,邸顺帆. 3D激光雷达SLAM算法综述[J]. 仪器仪表学报,2021,42(9):13-27. DOI: 10.19650/j.cnki.cjsi.J2107897 ZHOU Zhiguo,CAO Jiangwei,DI Shunfan. Overview of 3D Lidar SLAM algorithms[J]. Chinese Journal of Scientific Instrument,2021,42(9):13-27. DOI: 10.19650/j.cnki.cjsi.J2107897
[14] SHAN T X, ENGLOT B, MEYERS D, et al. LIO-SAM: tightly-coupled lidar inertial odometry via smoothing and mapping[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Las Vegas, 2021: 5135-5142.
[15] HEMANN G, SINGH S, KAESS M. Long-range GPS-denied aerial inertial navigation with LIDAR localization[C]. IEEE/RSJ International Conference on Inetlligent Robots & Systems, Daejeon, 2016: 1659-1666.
[16] YE Haoyang, CHEN Yuying, LIU Ming, et al. Tightly coupled 3d lidar inertial odometry and mapping[C]. International Conference on Robotics and Automation(ICRA), Montreal, 2019: 3144-3150.
[17] GENTIL C L,VIDAL-CALLLEJJA T,HUANG Shoudong. IN2LAAMA:inertial lidar localization autocalibration and mapping[J]. IEEE Transactions on Robotics,2021,37(1):275-290. DOI: 10.1109/TRO.2020.3018641
[18] KULKARNI M, DHARMADHIKARI M, TRANZATTO M, et al. Autonomous teamed exploration of subterranean environments using legged and aerial robots[C]. International Conference on Robotics and Automatioan(ICRA), Philadelphia, 2022: 3306-3313.
[19] FRANK N, TILMAN K, ROBERT K, et al. Mc2SLAM: real-time inertial lidar odometry using two-scan motion compensation[C]. German Conference on Pattern Recognition, Cham, 2018: 60-72.
[20] REN Zhuli,WANG Liguan,BI Lin. Robust GICP-based 3D LiDAR SLAM for underground mining environment[J]. Sensors (Basel Switzerland),2019,19(13):2915. DOI: 10.3390/s19132915
[21] SHAN Tixiao, ENGLOT B. LeGO-LOAM: lightweight and ground-optimized lidar odometry and mapping on variable terrain[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, 2019: 4758-4765.
[22] ZHAO Yue,ZHANG Jian,FU Chiwing,et al. KD-Box:line-segment-based KD-tree for interactive exploration of large-scale time-series data[J]. IEEE Transactions on Visualization and Computer Graphics,2021,28(1):890-900.
-
期刊类型引用(25)
1. 周文峰, 王卫红, 陈建华, 王炳乾, 吴玉清, 徐钰皓, 彭学礼. 基于Cesium的大体量数字露头实景三维模型快速可视化优化研究. 物探化探计算技术. 2025(04)  百度学术
百度学术
2. 李震,谭卢师,范伟,王芳,田帅帅. 数字孪生倾斜摄影模型轻量化技术的研究与应用. 水利信息化. 2025(01): 42-46 . 百度学术
3. 高飞. 数字乡村多源数据融合及可视化. 红河学院学报. 2025(02): 23-26+52 . 百度学术
4. 王晓晗,肖鹏安,宋达,姚素新,吕应华. 自主PDM三维模型轻量化集成及可视化浏览. 机械工程师. 2025(04): 92-98 . 百度学术
5. 鲜灿龙,袁逸萍,晁永生. 基于数字孪生的纺纱车间能耗可视化系统. 上海纺织科技. 2025(04): 29-33 . 百度学术
6. 杨礼国,刘秋燕,郑利龙,赵宇璇,朱欢丽. 多维图形引擎融合研究与应用. 人民长江. 2024(03): 6-12 . 百度学术
7. 王嘉伟,王海军,吴汉宁,吴艳,韩珂,程鑫,董敏涛. 基于三维地质建模技术的煤矿隐蔽致灾因素透明化研究. 工矿自动化. 2024(03): 71-81+121 . 本站查看
8. 何成威,吴鼎,梁建波,朱乔利,刘浩杰. 基于Cesium的倾斜摄影加载优化策略研究. 水利规划与设计. 2024(06): 105-108 . 百度学术
9. 孙军,石晓东,孙诗华. 改进边折叠算法的数字孪生模型几何轻量化设计. 沈阳建筑大学学报(自然科学版). 2024(04): 745-755 . 百度学术
10. 刘松,杨恒,胡伟路,肖凯,郭茜航,熊嘉诚. 基于游戏引擎的工厂模型优化与调度方法研究. 中国信息界. 2024(06): 198-202 . 百度学术
11. 孙乐. 基于“任务包”方法的BIM轻量化管理系统研究与应用. 河南科技. 2024(20): 78-82 . 百度学术
12. 杨帆,金有杰,丁炜. 面向Web端的可视化模型轻量化研究与实现. 西南民族大学学报(自然科学版). 2024(06): 705-708 . 百度学术
13. 李孟达,杜汉强,李庚,韩佳庚. 基于三维数字化工厂模拟运维仿真的模型轻量化研究. 电工技术. 2023(04): 74-76+214 . 百度学术
14. 王钟泽,马晓飞,段金荣,沈楠楠,何雅慧,王芸. 基于Three.js的交互式鱼类模型展示系统设计. 渔业现代化. 2023(02): 50-57 . 百度学术
15. 郑之光. 基于Cesium的多源异构三维数据地理配准研究. 中阿科技论坛(中英文). 2023(04): 121-125 . 百度学术
16. 陈雪婷,王泽宇,寇柏源,余秋亮. 基于BIM的建筑模型三维可视化运维管理平台. 绿色建造与智能建筑. 2023(04): 33-36+40 . 百度学术
17. 皇甫浩然,杨蕊华,胡明林,郑龙飞,隗元帅. 基于虚拟现实技术的气动式多轴数控攻丝机虚拟仿真教学系统开发. 机电产品开发与创新. 2023(04): 169-171+191 . 百度学术
18. 何佳,陈超,逯菲菲,田磊. 地铁隧道工程BIM模型的轻量化技术研究与应用. 建筑机械化. 2023(08): 65-68 . 百度学术
19. 陈可蕴,柳翠明,赵林峰,韩珊珊,夏小科. 地理信息时空数据中台的构建与应用——以南沙新区为例. 地理空间信息. 2023(11): 32-35+45 . 百度学术
20. 黄欣然,江文萍,刘一飞,夏竹君. Cesium环境中三维场景数据的加载优化策略. 测绘地理信息. 2022(S1): 94-98 . 百度学术
21. 商庆亮. 基于FMI标准的汽车仿真大数据平台关键技术研究. 汽车工业研究. 2022(04): 54-58 . 百度学术
22. 何丽微,王忠鑫,王金金,郭晓松,高群,齐振鹏. BIM设计与数字化交付在矿山工程中的应用. 露天采矿技术. 2022(06): 35-37+42 . 百度学术
23. 王云龙,朱明清,韩刚,刘彤军. 一种三维模型轻量化技术研究. 黑龙江科学. 2021(20): 29-31 . 百度学术
24. 汪洋,徐震,赵杏英,林武,李凌翔. 基于空间索引的倾斜模型轻量化技术研究与实现. 人民长江. 2021(S2): 298-301 . 百度学术
25. 孙源,王国光,赵杏英,汪洋,董大銮. BIM模型轻量化技术研究与实现. 人民长江. 2021(12): 229-235 . 百度学术
其他类型引用(25)