
Research on emergency management system of unmanned transportation system in open-pit coal mine
-
摘要: 随着智能化矿山的发展,露天煤矿无人驾驶运输系统已逐步开展实验应用,但新技术的应用带来新的管理挑战,已有的应急管理体系无法满足新的现状需求。针对上述问题,从现状分析、体系框架设计、体系构建、未来发展趋势等4个方面,对露天煤矿无人驾驶运输系统应急管理体系进行了研究。首先,分析了露天煤矿无人驾驶运输系统应急管理现状,总结了应急管理工作中可能面临的新挑战:新技术应用经验不足、缺乏针对性应急管理内容、信息共享及协调能力弱导致事件处置流程与内容不够明确。其次,对露天煤矿无人驾驶运输系统的突发事件进行了分类(包括运输事故类、气象灾害类、通信事故类、火灾类及其他类),并结合露天煤矿企业安全及应急管理的总体要求,针对性地设计了露天煤矿无人驾驶运输系统的应急管理体系框架,涵盖了生产作业过程中对突发性危机事件的预防、监控、处理和恢复整个环节。然后,从应急准备与演练、监测预警、应急响应、处置管理4个方面对露天煤矿无人驾驶运输系统应急管理体系建设内容进行了详细分析。最后,基于智能化矿山发展背景,探讨了露天煤矿应急管理体系未来发展趋势,包括调度管理与应急处置一体化、应急预案编制智能化、信息安全重视高度化。研究成果为进一步完善露天煤矿无人驾驶运输系统突发事件应急管理理论、制定切实有效的应急预案提供了参考。Abstract: With the development of the intelligent mine, open-pit coal mine unmanned transportation system has gradually carried out experimental applications. But the application of new technologies brings new management challenges. The existing emergency management system can not meet the needs of the new status. In order to solve the above problems, the emergency management system of the unmanned transportation system in the open-pit coal mine is studied from four aspects: the analysis of the present situation, the design of the system framework, the system construction and the future development trend. Firstly, the status quo of emergency management of unmanned transportation system in the open-pit coal mine is analyzed. The new challenges that may be faced in emergency management are summarized. The challenges include the lack of experience in the application of new technologies, the lack of targeted emergency management content, and the lack of clarity in the event disposal process and content caused by the weak capability of information sharing and coordination. Secondly, the emergency of the unmanned transportation system in the open pit coal mine is classified (including transportation accident, meteorological disaster, communication accident, fire and others). According to the general requirements of safety and emergency management of open pit coal mine enterprises, the framework of the emergency management system of the unmanned transportation system in the open pit is designed. The framework covers the whole links of prevention, monitoring, disposal and recovery of the sudden crisis in the production process. Thirdly, the construction of the emergency management system of the unmanned transportation system in the open pit coal mine is analyzed in detail from four aspects of emergency preparation and drill, monitoring and early warning, emergency response and disposal management. Finally, based on the development background of intelligent mine, the future development trend of emergency management system in the open-pit coal mine is discussed, including the integration of dispatching management and emergency disposal, the intellectualization of emergency plan preparation, and the emphasis on information security. The research results provide a reference for further improving the emergency management theory of unmanned transportation system in open-pit coal mine and formulating effective emergency plan.
-
0. 引言
近年来,随着国家“两化融合”工作的推进,国家发展改革委和国家能源局等八部委联合印发的《关于加快煤矿智能化发展的指导意见》等政策出台,我国煤矿智能化建设加快推进,全行业已建成了一批智能化示范煤矿,推动了煤矿质量变革、效率变革、动力变革[1]。
煤矿智能化建设现已成为煤炭行业内一项具有高度共识的创新型工作,露天煤矿智能化建设也如火如荼地开展[2-3]。随着新技术、新产品,特别是5G网络、车联网技术、机器学习、人工智能等技术的应用推广,无人驾驶技术在露天煤矿得到了快速发展。建设露天煤矿无人驾驶运输符合国家战略,也是解决目前露天煤矿企业招工难、工效低、成本高、运输事故多等问题及绿色发展的必然选择。
目前,全球五大矿用车供应商都在进行无人驾驶矿车的应用研究,国外如日本的无人驾驶运输系统已进入落地商用阶段,基本可实现完全无人化运输,已在全球4个国家的10个矿山应用,包括铜矿、铁矿和油砂矿[3]。国内在露天煤矿无人驾驶运输方面做了大量工作[4-6],如国家能源集团宝日希勒露天煤矿实现了极寒型复杂气候环境露天煤矿无人驾驶卡车编组,是业内首个同时实现24 h全天候、无安全员作业的项目;神华北电胜利能源有限公司胜利一号露天煤矿7台在用220 t级自卸卡车完成无人化改装,实现无人矿卡“装、运、卸”典型作业过程的完全无人自主运行;24台无人驾驶新矿卡于内蒙古锡林河煤化工有限责任公司贺斯格乌拉南露天煤矿落地;中国神华能源股份有限公司哈尔乌素露天煤矿也开展了矿用自卸车无人驾驶系统项目。
为保障煤矿企业安全高质量发展,智能化建设工作的推进势必需要安全及应急管理工作的跟进,从本质上提升作业安全性,有助于实现露天煤矿智能、安全、高效生产,是对“少人则安、无人则安”理念的深入推进。露天煤矿无人驾驶研究正从市场调研、技术探索、应用实践、迭代更新方面紧张有序地开展,由于迭代过程中露天煤矿无人驾驶技术的不成熟和不稳定,需要加强各项安全管理,更应该在露天煤矿应急管理总体体系下进行专项的应急管理体系建设研究。
露天煤矿应急管理是企业安全管理的重要内容,与职工生命安全和国家财产安全紧密相关,而露天煤矿无人驾驶运输系统的应急管理又是露天煤矿智能化建设进程中不可或缺的重要部分。针对露天煤矿中无人驾驶运输系统的应用所带来的管理新挑战,为满足新的应急管理现状需求,本文从现状分析、体系框架设计、体系构建、未来发展趋势等4个方面,对露天煤矿无人驾驶运输系统应急管理体系进行研究,以期为进一步完善露天煤矿无人驾驶运输系统突发事件应急管理理论、制定切实有效的应急预案提供参考。
1. 应急管理现状分析
国外的矿山安全管理工作起步较早,例如德国、澳大利亚、美国等已经形成了比较系统、完善的矿山安全管理体系,并且建立了相应具体的矿山安全法律法规。矿山企业也具有相对完善的管理组织机构、安全管理体系和运行机制,从而使企业对安全生产负起相应的法律责任[7]。
国内的安全应急管理一直是企业生产活动中的重点工作,对于矿山安全管理的建设工作也逐步加强,除了《安全生产法》《矿山安全法》《煤矿安全监察条例》等法律法规,还有大量的国家标准、行业标准、企业单位规范等。
针对如何进一步提高企业安全水平及事故应急能力,许多专家学者开展了研究工作[8-10]。郑万波[11]、齐春雪等[12]针对如何利用信息化技术辅助矿山事故后的应急管理工作提出了相关见解和应用案例。庞可染[7]、王雷[13]针对露天矿应急救援体系、安全管理等给出了具体完善方法。艾翔[14]、潘春勃[15]从露天煤矿管理角度对现状进行了分析并提出了对策。
虽然现有诸多法规文件,也有许多学者在矿山应急管理体系方面做了研究,但无人驾驶运输系统在露天煤矿的应用技术不成熟、应用时间较短,涉及其对应急管理体系的影响方面的规范要求、科学研究较少。无人驾驶运输系统是智能露天煤矿建设的重要组成部分,但新技术产品的研发成型、应用落地和安全生产是一个不断迭代发展的过程,由此给露天煤矿的安全应急管理工作带来以下新的挑战。
(1) 无人驾驶运输系统的应用属于新技术产品的探索应用,与之匹配的应急管理工作经验积累不足。
(2) 现有应急管理侧重事后处置,对突发事件的监测预警考虑不足,并且管理体系更新较慢,缺乏针对新技术产品的内容,尚未进行无人驾驶运输系统的专项预案编制。
(3) 露天煤矿无人驾驶运输系统突发事件处置过程中,涉及多个部门的协调配合。信息闭塞、协调机制不健全、联动配合不够紧密,都可能造成职责不明确等情况,影响应急处置效率。
2. 应急管理体系框架设计
2.1 突发事件分类
突发事件是指突然发生,造成或者可能造成严重危害,需要采取应急处置措施以应对的自然灾害、事故灾难事件。对突发事件进行合理的种类划分,是有针对性指定和实施防范应对措施的前提。
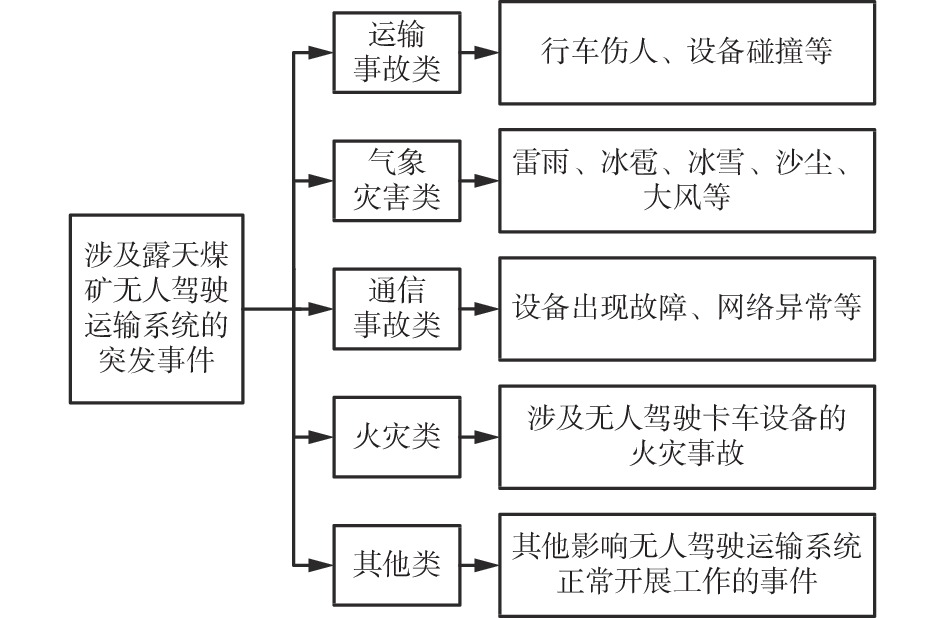
结合现阶段无人驾驶运输运行情况,参考GB/T 35561—2017《突发事件分类与编码》,本文依据突发事件的起因及影响性质,遵循科学性、系统性、可扩延性、兼容性、综合实用性等原则,将涉及露天煤矿无人驾驶运输系统的突发事件划分为运输事故、气象灾害、通信事故、火灾及其他5类,如图1所示。
![]() 图 1 露天煤矿无人驾驶运输系统的突发事件分类Figure 1. Emergency classification of unmanned transportation system of open-pit coal mine
图 1 露天煤矿无人驾驶运输系统的突发事件分类Figure 1. Emergency classification of unmanned transportation system of open-pit coal mine(1) 运输事故类突发事件是指无人驾驶卡车在编定的时间、道路进行无人驾驶作业过程中,因调度设计及定位精度问题与其他生产设备有时空交叉时,发生失控,造成行车伤人、设备碰撞等事故,进而造成设备损坏、其他物质损坏或人员伤亡的突发事件。
(2) 气象灾害类突发事件是指出现雷雨、冰雹、冰雪、沙尘、大风等极端天气,造成无人驾驶卡车运行环境改变,出现地面严重积水、能见度下降等可能影响运输作业安全的突发事件。
(3) 通信事故类突发事件是指无人驾驶专有通信系统设备出现故障、网络异常、网络延迟较高等,导致数据通信传输出现极大偏差,影响无人驾驶卡车数据通信的突发事件。
(4) 火灾类突发事件是指由于某原因(如车辆发生追尾、碰撞,电气设备老化等)发生无人驾驶卡车设备火灾事故,致使无人驾驶卡车操控出现异常的突发事件。
(5) 其他类突发事件是指除上述分类以外影响无人驾驶运输系统正常开展工作的突发事件。
2.2 体系构建的一般要求
通过对各类突发事件的深入理解,认识到只要把握规律,应对得当,突发事件的发展是可以防止的,突发事件引发的损失也是可以有效控制的。露天煤矿应急管理工作从总体上大多遵循普遍性和规律性的原则,因此,在露天煤矿无人驾驶运输系统应急管理体系构建过程中,需要遵循下述一般要求。
(1) 无人驾驶运输系统应急管理体系并非孤立的,需要结合企业无人驾驶运输系统实施的自身特点,建立预防与应急相结合的专项应急管理体系,并将其纳入企业安全生产应急管理的整体工作框架中。由于不同露天煤矿企业的道路运输条件不同,无人驾驶运输系统的发展程度不统一,这就要求无人驾驶运输系统的应急管理体系在满足普适性的同时,更要兼顾特殊性,要能适应不同企业发展条件。
(2) 体系构建需明确应急管理的目标与原则,目标与原则应体现以人为本、预防为主、统一领导、分类管理、快速反应、常备不懈、高效协调及持续改进。目标与原则决定了无人驾驶运输系统的应急管理体系整体发展方向,只有坚持以人为本的首要构建原则,才能使应急管理体系不背离核心,才能构建成安全第一的体系。通过秉承以人为本的原则,使应急管理每个环节都切实保障安全发展。
(3) 突发事件更应防患于未然,坚持以防为主、防抗救相结合,关注突发事件各类诱因的监测监控,构建“优化、协同、高效”的应急管理体系框架。传统的应急管理体系侧重事后处置,对突发事件的监测预警考虑不足,故体系在构建时,要加强对预案编制的重视,完善监测预警系统,针对新技术产品及时更新监测预警系统。
2.3 体系框架
无人驾驶运输系统应急管理是矿山整体应急管理的一部分,不仅需遵循国家、企业现存的政策文件与技术标准,同时需要无人驾驶系列标准的支撑,包括卡车性能、性能检测、工控安全、通信设施、道路设施、检查维护、运行管理、安全管理等技术规范,还需要对相关突发事件进行分析和分类。
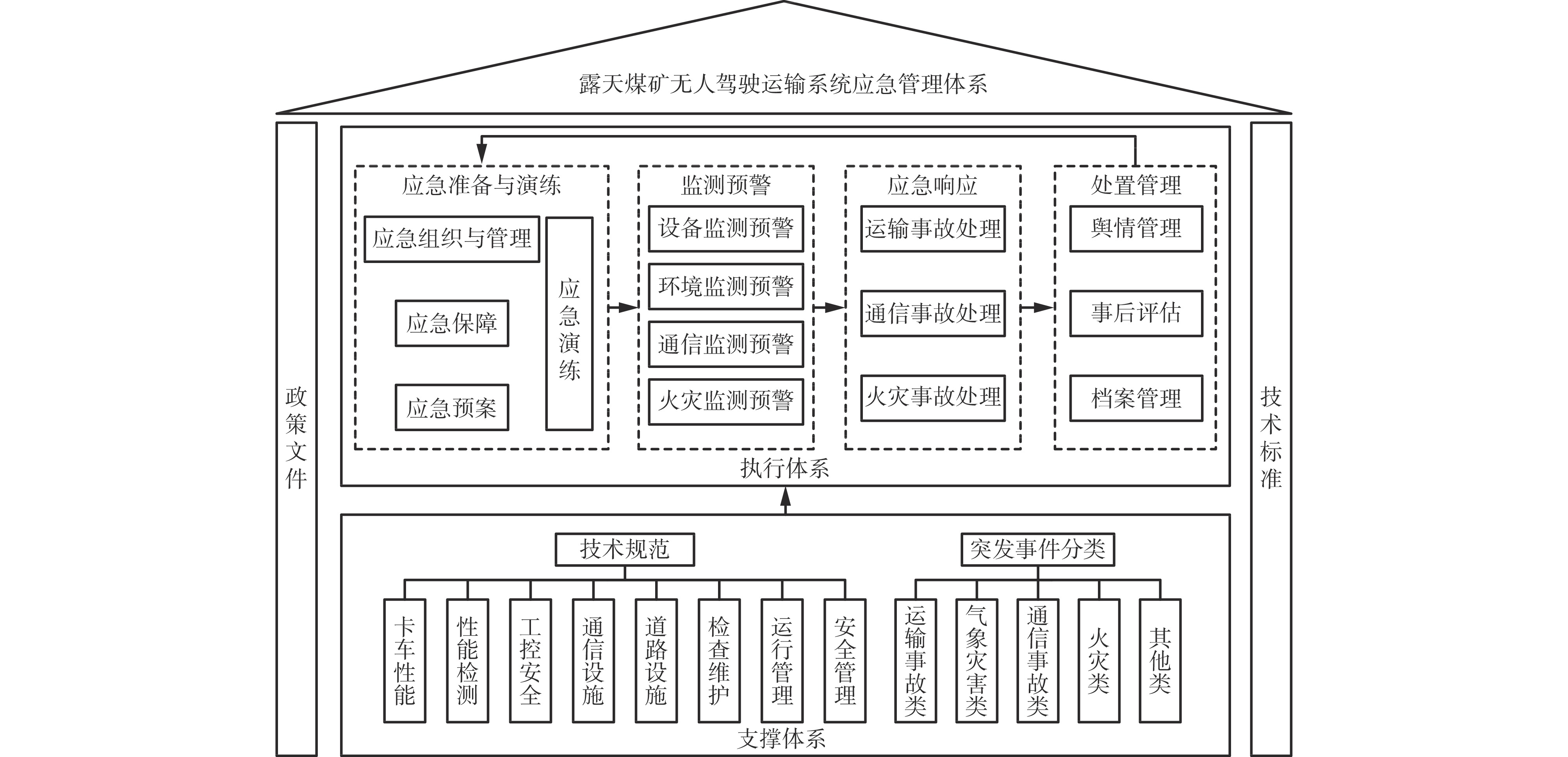
根据露天煤矿安全管理及应急管理总体要求,露天煤矿无人驾驶运输系统应急管理是在露天煤矿生产作业过程中,对无人驾驶运输系统运行全过程的保障,是针对生产作业过程中突发性危机事件的预防、监控、处理和恢复机制,包括应急准备与演练、监测预警、应急响应、处置管理等部分,体系框架如图2所示。
![]() 图 2 露天煤矿无人驾驶运输系统应急管理体系框架Figure 2. Framework of emergency management system of unmanned transportation system of open-pit coal mine
图 2 露天煤矿无人驾驶运输系统应急管理体系框架Figure 2. Framework of emergency management system of unmanned transportation system of open-pit coal mine在应急准备与演练部分,要构建完善的应急管理体制和人员组织结构,制定应急管理预案,并对应急方案的实施进行模拟演练。在监测预警部分,主要是利用信息化技术,对无人驾驶卡车及突发事件关联影响因素进行监测,发现异常时及时发出告警。在应急响应部分,根据应急预案,及时组织人员和物资,展开救援和事态控制行动。在处置管理部分,不仅要在应急响应过程中关注舆论等信息,还要在应急结束后对事件的处理过程进行分析总结,做好善后和补救事宜,完善现有应急预案,不断提高应急管理能力。
3. 应急管理体系构建
应急管理体系的建设目标是建立一套统一、协调、高效和规范的突发事件应急机制,提高露天煤矿无人驾驶运输系统应对突发事件的能力。依据露天煤矿无人驾驶运输系统应急管理体系框架,各部分建设内容如下。
3.1 应急准备与演练
3.1.1 应急组织与管理
露天煤矿无人驾驶运输系统应急组织机构(以下简称应急组织机构)设置的合理性是应急处理效率的关键性影响要素。应急组织机构在整个应急管理体系中占据主导地位,具有最终决策权,同时也是应急预案实际执行主体。应急组织机构隶属企业安全管理部门,应与企业安全生产应急管理部门形成有效互补。
在建设应急组织机构过程中,应明确组织的组成机构,合理划分各职能部门的管理权限,并明确各组织机构间的隶属关系,确定各层级部门主体的管理责任。确保在发生突发性事件时,整个应急处理组织机构能够协助企业安全生产应急管理部门高效有序运转,组建应急指挥部,指挥应急救援、协调事故调查、性质认定责任处理相关工作,向上级归口部门报告应急工作情况等。应急指挥机构具有露天煤矿无人驾驶运输系统应急管理的最高决策权,应急组织机构负责确定应急预案并组织实施,与现场部门相互配合,做好突发事件的应急物资、应急人员、应急通信等保障准备,并控制事态发展;负责组织开展突发事件应急知识和技能的教育培训;完成突发事件处理后,要对故障设备和损坏设备进行维修更换,恢复正常生产。
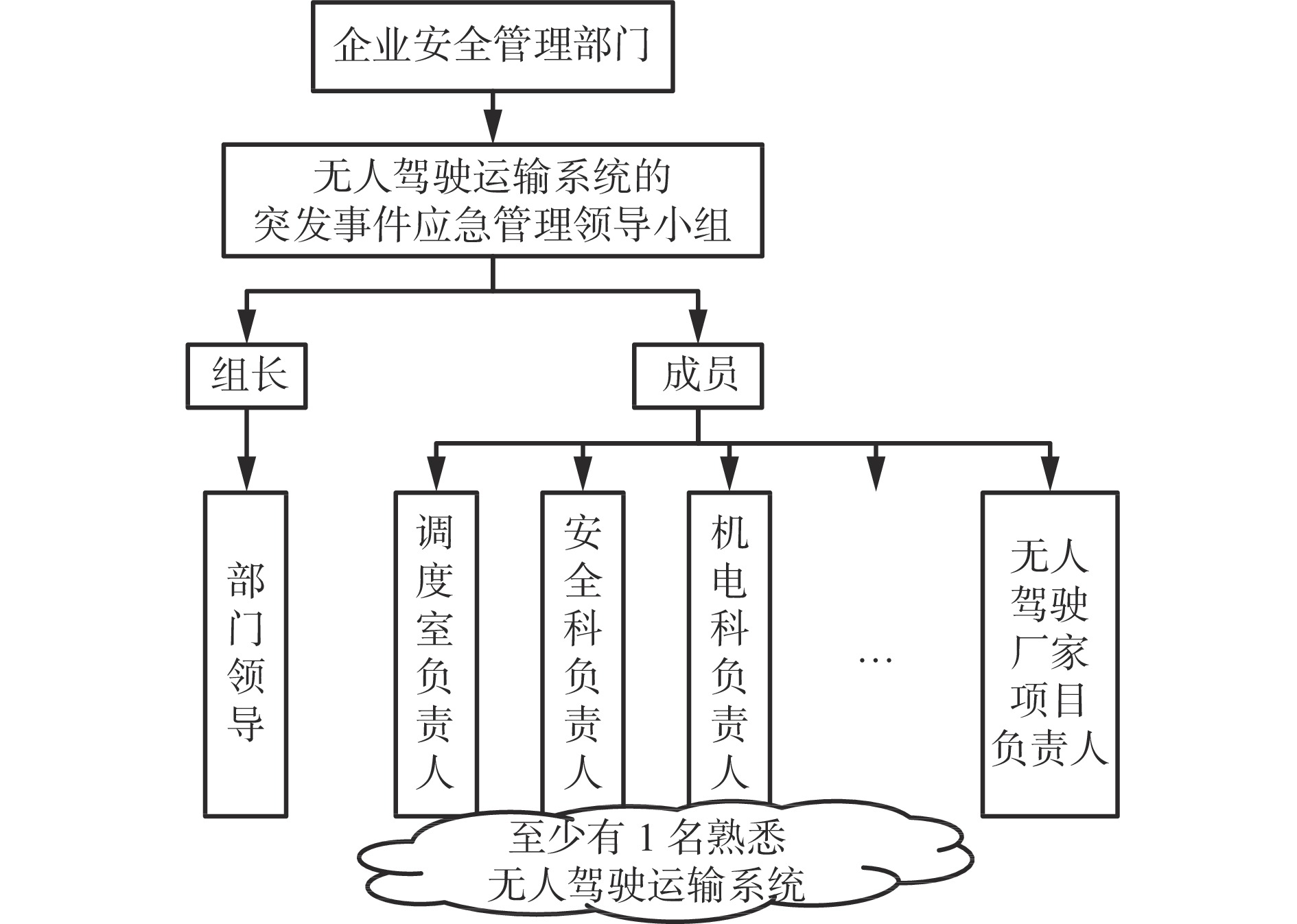
应急组织机构应设立对应的无人驾驶运输系统突发事件应急管理领导小组(以下简称应急领导小组),由企业安全管理部门领导兼任组长,副组长中应至少有1名熟悉无人驾驶运输系统并参与过应急管理培训与演练,成员由各职能部门及生产部门主要负责人组成。应急领导小组参与协调、联络各级应急机构和部门,应贯彻落实有关突发事件应急的法律、法规和规定;负责组织无人驾驶运输系统的应急预案编制、修订和演练工作;负责指挥、协调无人驾驶运输系统的应急准备、应急响应和应急救援工作;负责监督、管理无人驾驶运输系统应急体系的建设和运转。应急组织机构框架如图3所示。
![]() 图 3 露天煤矿无人驾驶运输系统应急组织机构框架Figure 3. Framework of emergency organization of unmanned transportation system of open-pit coal mine
图 3 露天煤矿无人驾驶运输系统应急组织机构框架Figure 3. Framework of emergency organization of unmanned transportation system of open-pit coal mine各职能部门及生产部门应配合应急组织机构和应急领导小组,行使其应急职能职责。
3.1.2 应急保障
应急保障工作应符合企业应急管理规定,属于露天煤矿应急管理体系物资保障的补充部分,因露天煤矿无人驾驶运输系统的特殊性,应急保障工作中重点突出物资和人员保障。
(1) 物资保障。物资保障是露天煤矿应急管理物资保障体系中专项部分内容,分为车辆、设备、资料等方面。
车辆保障:做好应急车辆保障管理工作,突发事件应急中,交通设备优先满足应急需求。
设备保障:设备分应急装备、通信设备和专用设备。其中应急装备按需配备齐全,有专人管理,并建有管理档案,需进行及时维护,对报废的应急设备进行及时更新。通信设备需保障在应急事故发生时,企业安全生产总调度指挥中心与应急领导小组能够保持通信畅通。专用设备用于对无人驾驶运输系统可能发生故障的设备进行物资储备,是区别传统应急装备的重要内容,包括无人驾驶卡车的主要传感器、计算单元、通信终端、常用连接线缆、移动式供电电源等。
资料保障:配备图纸资料,包括采剥工程平面图、生产现状图、边坡监测图及边坡监测分析报告、供电系统图及无人驾驶卡车运输情况记录表等。
(2) 人员保障。人员保障是露天煤矿应急管理人员保障体系中的专项部分,作业人员上岗前必须进行安全教育培训,将可能发生的事故及事故后果告知作业人员,对作业人员进行心肺复苏等应急救援措施的培训。为应对无人驾驶运输系统可能出现的新技术问题,需组建无人驾驶运输方面的安全应急技术专家库。
为保障日常运行,防范事故灾害,无人驾驶卡车安全员、协同作业设备及辅助车辆驾驶员等,需要安排每年不少于24课时的技能培训,讲解分析无人驾驶运输系统可能面临的新问题,在考试合格后方可上岗作业。
3.1.3 应急预案
应急预案是应急管理的重要基础和支撑,是一种预测和预判,主要包括应急规划、应急文件纲要和指引等。应急预案可以将应急管理中的责任落到实处,将责任进行细致划分,可以将突发事件发生前、发生中、发生后的责任具体落实到对应的主体部门及负责人。
露天煤矿无人驾驶运输系统专项应急预案的建立,首先要符合有关法律法规和规章制度的要求,其次要匹配企业安全管理内容及应急管理总体要求。无人驾驶运输系统应急预案的专项要求如下:
(1) 明确如何判断车辆是否为自动驾驶模式、如何检测是否切断自动驾驶模式、如何进行车辆的远程接管、如何将车辆转移到安全地方等内容。
(2) 针对典型的突发事件,如运输设备碰撞、极端天气、通信故障、火灾等制定具体的应急预案。
(3) 针对专项突发事件,如通信故障、极端天气,在制作应急预案过程中,需要进一步对事件进行细分,如通信故障细分为设备故障、网络入侵等,极端天气细分为大风、大雨、暴雪等。
(4) 发生下列情形时需要及时对应急预案进行修正:无人驾驶运输技术(如线控改造、通信方式、感知方式等)发生变化;地质和开采环境发生变化,形成新的重大危险源,或对无人驾驶控制造成影响。
3.1.4 应急演练
应急演练是露天煤矿无人驾驶运输系统应急管理的实践操作部分。应急预案为如何应对突发事件制定了相关的保障措施、处置流程,但如果只停留在纸面,仍无法解决实际问题。因此,需要制定应急演练计划,将纸面知识转换为实际行动。
应急演练分为单项演练和组合演练。单项演练是对特定应急任务的演练,组合演练是对多个应急任务一起演练。为更好地实现应急演练目标,每次演练需要预先制定演练计划,并在计划中说明演练场景。
突发事件的应急演练需要定期开展,以加强对事件处理的记忆,单项演练每月不少于1次,组合演练每年不少于2次。每年应至少完成1次有矿方与无人驾驶服务商参与的完整演练。
应急演练的整个过程应有详细记录,并形成报告。应对应急演练结果进行总结和评估,及时解决演练中暴露出的问题。
3.2 监测预警
应急管理应以防为主,监测预警是提前发现问题、预防事故发生的重要手段。因此,需要结合企业现有安全生产监测预警系统,考虑无人驾驶运输的各类影响因素,建设具有碰撞监测、气象监测、火灾监测、通信监测、车辆失控监测等功能的监测与预警系统。
监测预警需要具有连续性,设置突发事件信息管理机制,汇集、存储、分析及传输有关突发事件的信息,报送给上级主管部门。对前述突发事件分类中涉及的风险因素,需要进行重点监测,在无人驾驶运输作业管控平台定期检查,确保满足露天煤矿无人驾驶运输系统技术规范相关要求。如检查不合格,应查明原因并清除故障,重新检查合格后方可继续开展运输作业。
监测预警内容分为设备监测预警、环境监测预警、通信监测预警、火灾监测预警4个部分。
(1) 设备监测预警。无人驾驶运输设备应能够满足卡车性能的相关要求,同时具有实时监测无人驾驶运输设备控制系统运行状态的功能。如果监测系统发现无人驾驶运输设备的控制系统出现异常,应立即进行报警,并按照应急预案规定流程开展处置工作。
(2) 环境监测预警。对环境的监测预警是非常重要的环节,气象环境、道路条件、道路设施、边坡防护、人员设备等都是需要监测的关注点。环境监测预警应具备道路路面质量和通行条件的智能监测功能,可接入气象监测、边坡监测等监测系统数据,对可能出现的气象灾害、边坡灾害等进行预警,能够支持对车辆、人员、落石等障碍物的感知,对可能造成运输事故的障碍物进行预警。
(3) 通信监测预警。无人驾驶运输系统的正常运行需要稳定、高效的通信网络,如果通信网络出现问题,可能导致事故发生。通过对通信网络的监测预警,能够有效保障正常通信。通信监测的内容包括监控网络安全、数据传输、信号稳定等,保证无人驾驶运输系统的数据通信。出现通信事故后,按照不同类别进行报警。
(4) 火灾监测预警。无人驾驶运输设备发生碰撞等事故后,容易发生火灾继生灾害。同时,因技术需求,设备增加了大量电气元件,进而增加了因元器件失效而引发的事故风险。通过对火灾的监测预警,能够及时发现火情,将其消灭在萌芽阶段。火灾监测预警需要重点关注作业设备行驶过程中的发动机、驾驶室、轮胎及周边环境是否有火灾情况,当出现火情后,按照不同类别进行报警。
3.3 应急响应
面对事故与灾害,应能够在其发生后迅速、有序地控制和处理,通过合理的方式方法,最大限度地减少损失,并将可能带来的影响控制在预期、可接受的目标内。
3.3.1 响应一般流程及原则
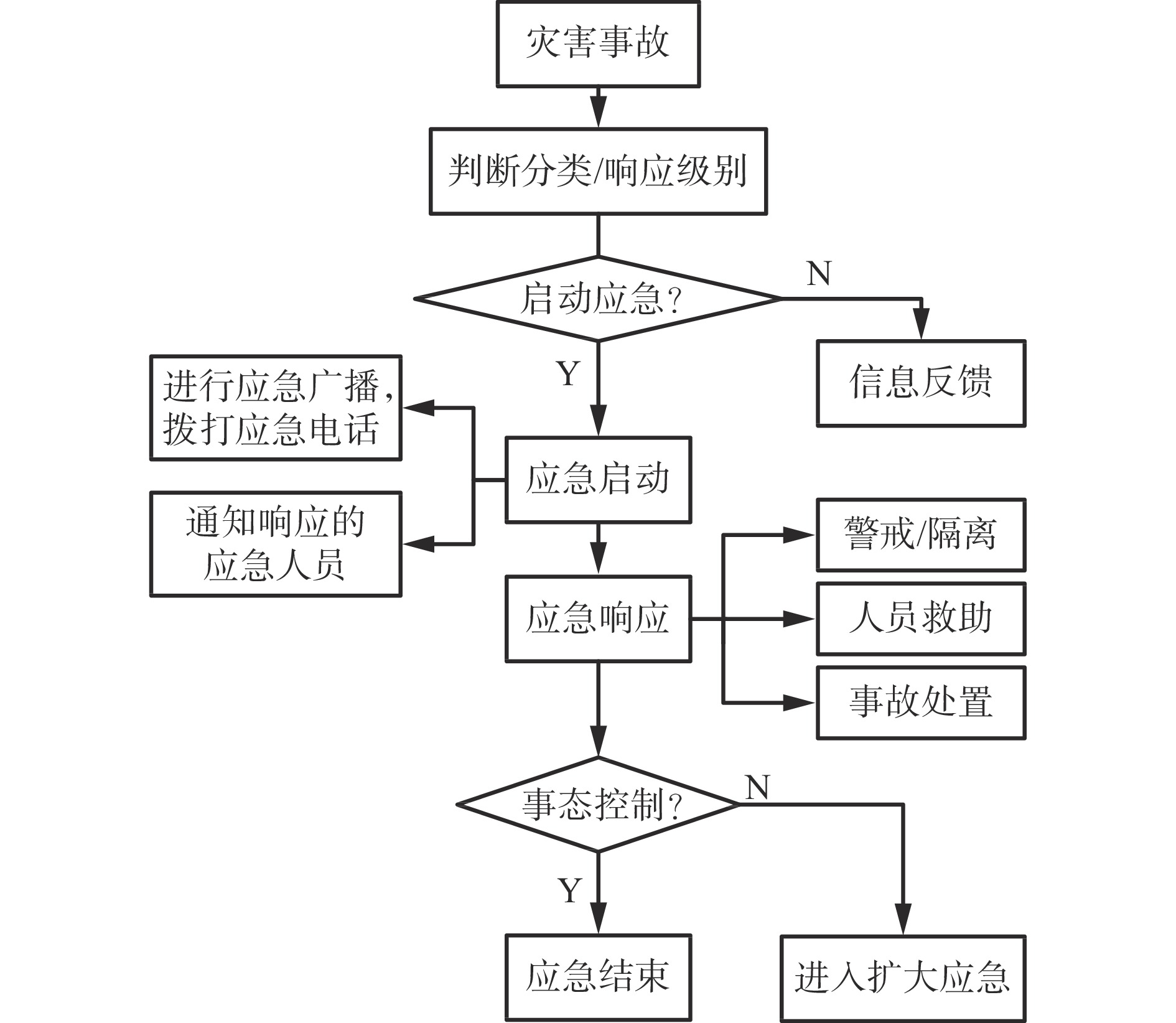
响应程序一般流程如图4所示。
每个员工及现场工作人员在发现紧急情况时均有义务立即报警,报警时应说明突发事件的类型、时间、地点等信息。同时,在保证安全事态不扩大的情况下,开展应急响应调度指挥。
突发事件发生后,应按照应急预案展开抢险工作,保证现场抢险通道畅通,隔离非相关人员及车辆,控制事故范围。应急组织机构应及时对突发事件的有关信息进行筛选、整理、评估,由应急领导小组按照灾害事故的分类分级规定,依级启动预案。在应急响应过程中,需要遵循以下3个原则:
(1) 迅速接管。安全员应在第一时间现场/远程接管车辆。
(2) 迅速传递危险信号。当无人驾驶卡车发生紧急情况时,安全员接管车辆后应迅速将危险信号传递出去,提醒其他人员、车辆注意避让。传递方式包括打开危险报警闪光灯、鸣笛、广播等。
(3) 先保人、后保物。发生紧急情况且人或物将面临损失时,应首先考虑人的安全。在危险时刻,必须优先确保人身安全。
3.3.2 事故应急处置方法
在无人驾驶运输系统中,根据突发事件分类,应急响应主要包括运输事故处置、气象灾害处置、通信事故处置、火灾事故处置。针对不同类型突发事件,应急组织机构应制定详细的应急预案,明确具体的应急执行计划,指导应急响应工作。
露天煤矿生产单斗−卡车开采工艺占据主要地位,运输事故是露天煤矿生产作业过程中需要关注的事故之一。露天煤矿无人驾驶系统运输事故主要体现在无人驾驶卡车、协同作业设备、无人驾驶运输作业管控平台、远程遥控驾驶4个方面,针对不同类型事故,处置方法也不同。下面以无人驾驶卡车方面导致的几类运输事故为例,说明事故应急处置方法。
如果无人驾驶卡车发生故障偏离行驶路线且未自动停车,应急处置方法如下:① 迅速接管车辆,关闭自动驾驶模式。② 开启车辆双闪,传递危险信号。③ 将事故信息上报。④ 在安全前提下,将车辆开至安全区;当需要在危险情况下进行救援,宜采用远程驾驶方式将卡车操控到安全区域。⑤ 在记录现场有关信息后,尽快将事故车辆撤离现场,恢复运输系统工作。⑥ 抓紧组织专业人员对事故车辆抢修。⑦ 事故车辆维修后,按照露天煤矿无人驾驶运输系统检查维护的相关技术规范要求进行检查,符合要求后方可进行运输作业。
如果无人驾驶卡车在运输过程中发生碰撞事故,应急处置方法如下:① 迅速接管车辆,关闭自动驾驶模式。② 开启车辆双闪,传递危险信号;如有人员在车内,将人员转移到安全地带。③ 如有人员伤亡,应第一时间打急救电话,并上报通知相关负责人立即赶赴事故现场处理。④ 若无人员伤亡,在安全前提下,将事故车辆开至安全区;当需要在危险情况下进行救援,宜采用远程驾驶方式将卡车操控到安全区域。⑤ 将事故信息上报,按照事故级别上报主管部门。⑥ 应急人员到场开展现场处置工作,注意检查碰撞双方车辆,避免发生火灾等次生灾害。⑦ 处置完毕后,要迅速采取措施,抓紧组织抢修受损的设备或设施,清除现场残留物,减少损失。⑧ 在记录现场有关信息后,尽快将事故车辆撤离现场,恢复运输系统工作。⑨ 事故车辆维修后,按照露天煤矿无人驾驶运输系统检查维护的相关技术规范要求进行检查,符合要求后方可进行运输作业。
露天煤矿无人驾驶运输系统应急管理体系应与现有的生产管理调度系统深度融合,当事故发生时,辅助用户判断事故分类及响应级别,并切换至专用的应急管理调度模式,实时的生产数据、设备信息及人员组织管理状态可即时展示在系统中,实现跨部门跨层次的数据共享及人员调度,流程化管理应急响应进度,保证应急管理体系的时效性,提高应急响应速度。
3.4 处置管理
处置管理是应急管理工作的最后一个环节。露天煤矿无人驾驶运输系统处置管理主要包括舆情管理、事后评估、档案管理3个部分。
(1) 舆情管理。舆情管理主要是突发事件发生后,企业安全管理部门对外对内的舆情管理相关工作。当突发事件发生后,按照企业应急响应等级统一发布或确定信息发布的形式和内容,所有员工应严格遵守规定的信息发布纪律,不应擅自对外发布事故灾害相关信息;企业安全管理部门收集完整的信息和专业见证资料,协助媒体以客观公正的角度报道事实真相,维护与媒体和公众的良好关系。
(2) 事后评估。事后评估主要是突发事件处理后期及处置结束后,企业安全管理部门对应急管理的事后处置工作。在事故处理后期,企业安全管理部门对事故的起因、过程、性质,人员伤亡及财产损失等情况进行调查,提交事故调查报告(包括对事故责任的处理意见和将来对同类事故的防范措施)。应急处置结束后,对原事故应急预案进行评估和完善,对事故管理工作中做出突出贡献的先进集体和个人给予表彰和奖励,对迟报、谎报、瞒报和漏报事故重要情况或事故管理工作中有其他失职、渎职行为的,给予相应处分,构成犯罪的,依法追究刑事责任。
(3) 档案管理。档案管理将整个事故过程中所有收发信息、领导批示、事故调查报告、现场录像、图片等材料整理归档,总结事故处理过程中的经验和教训。
4. 应急管理体系未来发展趋势
随着露天煤矿智能化建设推进,5G、无人驾驶卡车、远程电铲等装备的应用,露天煤矿正逐渐向设备自动化、开采无人化迈进。在该过程中,人的参与会越来越少,设备的自动控制会越来越多,智能化程度会越来越高。因此,本文对露天煤矿无人驾驶运输系统应急管理体系未来发展趋势进行了思考。
(1) 调度管理与应急处置一体化。随着“一张图”等技术的应用,露天煤矿逐渐实现了信息的综合管控,将整个采矿活动的所有相关专业信息集成到一个系统中,进行在线处理和协同工作。应急管理工作也可与现有生产管理调度系统相融合,在事故灾害发生后,系统无缝切换到应急管理调度模式,当前时刻的生产数据、设备信息可同时展示在系统中,实现多部门多层次数据共享,提高矿山应急管理的综合分析能力和应急响应速度。
(2) 应急预案编制智能化。随着自然语言处理技术、认知与推理技术、机器学习技术的发展,应急预案的编制也将实现智能化。在应急资源数据库基础上,结合生产过程中产生的大量动态运行数据,利用智能化分析算法,对数据进行分析和挖掘,动态分析安全风险、优化应急救援处置方案。在灾害或事故后,运用系统可获得的各类信息,如事故类型、发生过程、事故后果及影响严重程度等,结合应急资源数据中相关数据,进行数据分析与挖掘,同时在此基础上,对应急机构、人员、技术、装备、设施(备)、物资、救援行动及其指挥与协调等进行动态调整,提供智能化分析决策。
(3) 信息安全重视高度化。远程控制、无人开采均需要通信基础的支撑,露天煤矿将逐渐高度网络化。与此同时,网络遭受攻击的风险不断增加。成功的攻击者可以操纵、远程控制,甚至摧毁装置,在某些特定时期,甚至可能制造影响国家重大安全的事件[16]。因此,未来的应急管理体系除了保护人员、环境和工业设施外,还必须确保信息技术安全。
5. 结论
(1) 通过对露天煤矿无人驾驶运输系统应急管理的现状进行分析,对应急管理工作中可能面临的新挑战进行了总结,主要包括新技术应用经验不足、缺乏针对性应急管理内容、信息共享及协调能力弱导致事件处置流程与内容不够明确等3个部分。
(2) 结合露天煤矿无人驾驶运输系统应急管理体系构建要求,朝着构建“优化、协同、高效”的应急管理体系目标,对露天煤矿无人驾驶运输系统应急管理体系进行了框架设计,涵盖了生产作业过程中对突发性危机事件的预防、监控、处理和恢复整个环节,并从应急准备与演练、监测预警、应急响应、处置管理等方面详细介绍了体系建设内容。
(3) 未来露天煤矿无人驾驶运输系统应急管理体系将主要朝着调度管理与应急处置一体化、应急预案编制智能化、信息安全重视高度化的方向发展。
-
![]()
图 1 露天煤矿无人驾驶运输系统的突发事件分类
Figure 1. Emergency classification of unmanned transportation system of open-pit coal mine
![]()
图 2 露天煤矿无人驾驶运输系统应急管理体系框架
Figure 2. Framework of emergency management system of unmanned transportation system of open-pit coal mine
![]()
图 3 露天煤矿无人驾驶运输系统应急组织机构框架
Figure 3. Framework of emergency organization of unmanned transportation system of open-pit coal mine
-
[1] 国家发展改革委, 国家能源局, 应急管理部, 等. 关于加快煤矿智能化发展的指导意见[N]. 中国煤炭报, 2020-03-05(2). National Development and Reform Commission, National Energy Administration, Ministry of Emergency Management, et al. Guiding opinions on accelerating the intelligent development of coal mines[N]. China Coal News, 2020-03-05(2).
[2] 付恩三,刘光伟,邸帅,等. 露天矿山无人驾驶技术及系统架构研究[J]. 煤炭工程,2022,54(1):34-39. FU Ensan,LIU Guangwei,DI Shuai,et al. Unmanned driving technology and system architecture in open-pit mines[J]. Coal Engineering,2022,54(1):34-39.
[3] 王富民,贺昌斌. 露天矿卡车无人驾驶技术的现状与展望[J]. 露天采矿技术,2021,36(3):45-47. DOI: 10.13235/j.cnki.ltcm.2021.03.012 WANG Fumin,HE Changbin. Status and outlook of autonomous driving technology for trucks in open-pit mine[J]. Opencast Mining Technology,2021,36(3):45-47. DOI: 10.13235/j.cnki.ltcm.2021.03.012
[4] 武讲,郑群飞. 哈尔乌素露天矿无人驾驶方案研究[J]. 金属矿山,2021(2):167-172. DOI: 10.19614/j.cnki.jsks.202102025 WU Jiang,ZHENG Qunfei. Feasibility study of driverless system in Harwusu Open-pit Coal Mine[J]. Metal Mine,2021(2):167-172. DOI: 10.19614/j.cnki.jsks.202102025
[5] 孟峰,徐煦,薛国庆,等. 5G+无人驾驶技术在国能宝日希勒露天煤矿智能化建设中的应用研究[J]. 中国煤炭,2021,47(增刊1):172-182. MENG Feng,XU Xu,XUE Guoqing,et al. Application research of 5G plus driveless technology in intelligent construction of China Energy Baorixile Open-pit Coal Mine[J]. China Coal,2021,47(S1):172-182.
[6] 杨荣明,丁震. 国家能源集团矿用卡车无人驾驶建设实践[J]. 智能矿山,2022,3(6):11-20. YANG Rongming,DING Zhen. The practice of unmanned construction of mining trucks of CHN Energy[J]. Journal of Intelligent Mine,2022,3(6):11-20.
[7] 庞可染. 露天矿山新型应急救援模式体系化设计[D]. 马鞍山: 安徽工业大学, 2017. PANG Keran. Systematic design of new emergency rescue mode in open pit mine[D]. Maanshan: Anhui University of Technology, 2017.
[8] 梅国栋,刘璐,文虎. 关于我国矿山应急救援体系的探讨[J]. 矿业安全与环保,2006,33(2):79-81. MEI Guodong,LIU Lu,WEN Hu. Discussion on my country's mine emergency rescue system[J]. Mining Safety and Environmental Protection,2006,33(2):79-81.
[9] 解学才,宫伟东,林辰,等. 我国煤矿应急救援现状分析研究[J]. 煤矿安全,2017,48(11):229-232,236. XIE Xuecai,GONG Weidong,LIN Chen,et al. Analysis study on present situation of emergency rescue in China's coal mines[J]. Safety in Coal Mines,2017,48(11):229-232,236.
[10] 王振平,刘媛媛,马砺,等. 我国矿山应急救援体系研究探讨[J]. 煤炭技术,2015,34(1):343-346. DOI: 10.13301/j.cnki.ct.2015.01.121 WANG Zhenping,LIU Yuanyuan,MA Li,et al. Discussion on Chinese mine emergency rescue system[J]. Coal Technology,2015,34(1):343-346. DOI: 10.13301/j.cnki.ct.2015.01.121
[11] 郑万波. 矿山应急救援一体化指挥决策信息平台研究[J]. 工矿自动化,2017,43(12):70-75. ZHENG Wanbo. Research on integrated command decision-making information platform for mine emergency rescue[J]. Industry and Mine Automation,2017,43(12):70-75.
[12] 齐春雪,张瑞新,刘嵘,等. 露天煤矿应急管理信息系统研发及应用[J]. 华北科技学院学报,2019,16(6):75-79. QI Chunxue,ZHANG Ruixin,LIU Rong,et al. Development and application of emergency management information system for opencast coal mines[J]. Journal of North China Institute of Science and Technology,2019,16(6):75-79.
[13] 王雷. 关于矿山开采安全事故应急管理体系的构建研究[J]. 中国金属通报,2021(11):21-22. DOI: 10.3969/j.issn.1672-1667.2021.21.011 WANG Lei. Research on the construction of emergency management system for mining safety accidents[J]. China Metal Bulletin,2021(11):21-22. DOI: 10.3969/j.issn.1672-1667.2021.21.011
[14] 艾翔. 露天矿山安全现状分析及管理对策[J]. 现代矿业,2019,35(4):9-11,23. AI Xiang. Status analysis and management countermeasures of open-pit mine[J]. Modern Mining,2019,35(4):9-11,23.
[15] 潘春勃. 露天煤矿安全管理对策探究[J]. 煤炭科技,2016(3):135-137. DOI: 10.3969/j.issn.1008-3731.2016.03.055 PAN Chunbo. Research on safety management countermeasures in open-pit coal mines[J]. Coal Science and Technology Magazine,2016(3):135-137. DOI: 10.3969/j.issn.1008-3731.2016.03.055
[16] 郑杰光. 从伊朗核设施近日“爆炸”看网络与智能作战运用[J]. 国防科技工业,2020(8):38-40. ZHENG Jieguang. The application of network and intelligent operations from the recent "explosion" of Iranian nuclear facilities[J]. Defence Science & Technology Industry,2020(8):38-40.
-
期刊类型引用(5)
1. 任兴贵,刘学文,付凯欣,杨明慧. 无人驾驶系统关键技术在超市购物车上的应用研究. 自动化与仪器仪表. 2024(10): 196-199 .  百度学术
百度学术
2. 李雄辉,郝波,李程,蒋学寨,田德强,陈小玄. 智慧矿山协同作业系统人机交互技术研究. 控制与信息技术. 2024(06): 34-42 . 百度学术
3. 商芷萱. 浅析矿山安全事故应急管理现状与优化方法. 内蒙古煤炭经济. 2023(03): 86-88 . 百度学术
4. 梁栋. 露天矿山无人运输作业交通管理系统设计. 工矿自动化. 2023(S1): 113-115+118 . 本站查看
5. 杨清峰. 试析煤矿安全生产监控与通信技术. 内蒙古煤炭经济. 2023(16): 91-93 . 百度学术
其他类型引用(3)
 下载:
下载:
计量
- 文章访问数: 927
- HTML全文浏览量: 81
- PDF下载量: 66
- 被引次数: 8
