Research on obstacle avoidance control method of multi-rotor aircraft in coal mine
-
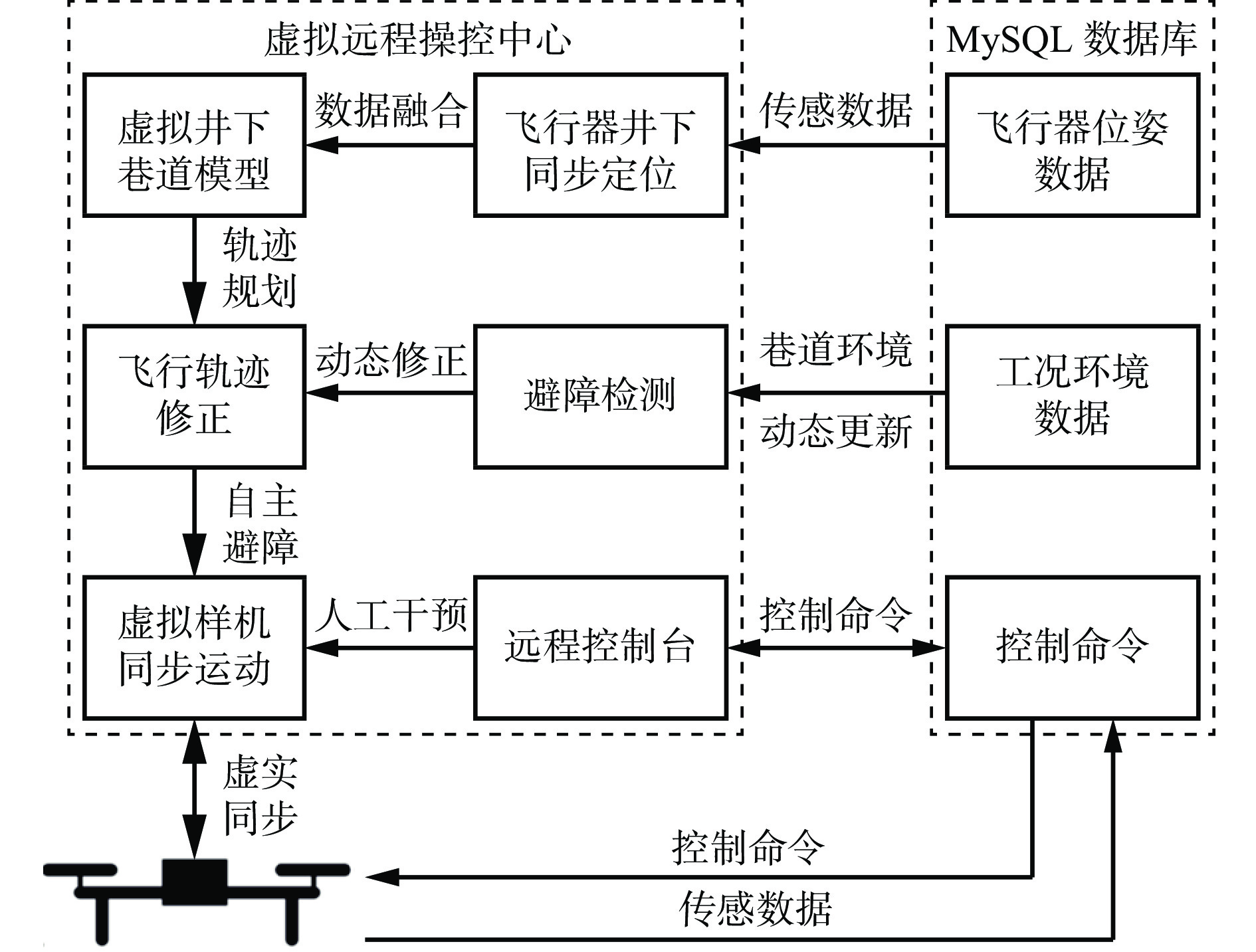
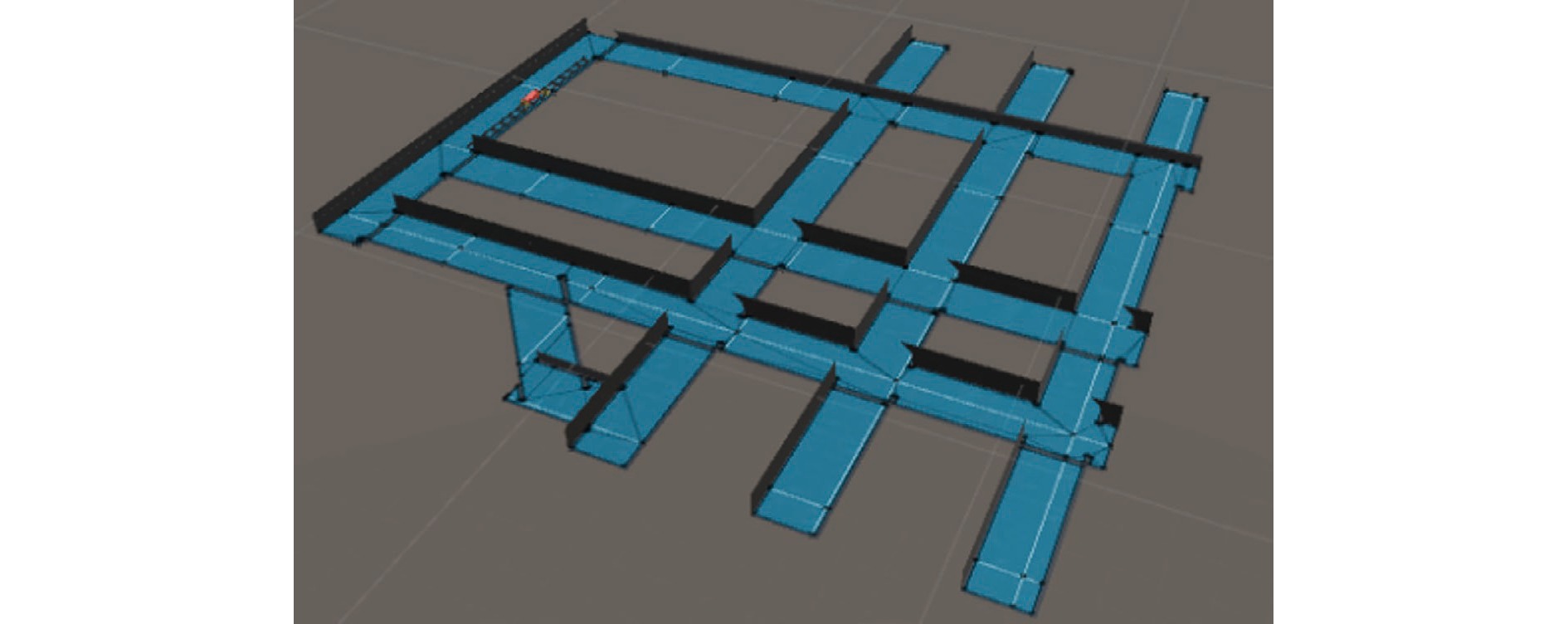
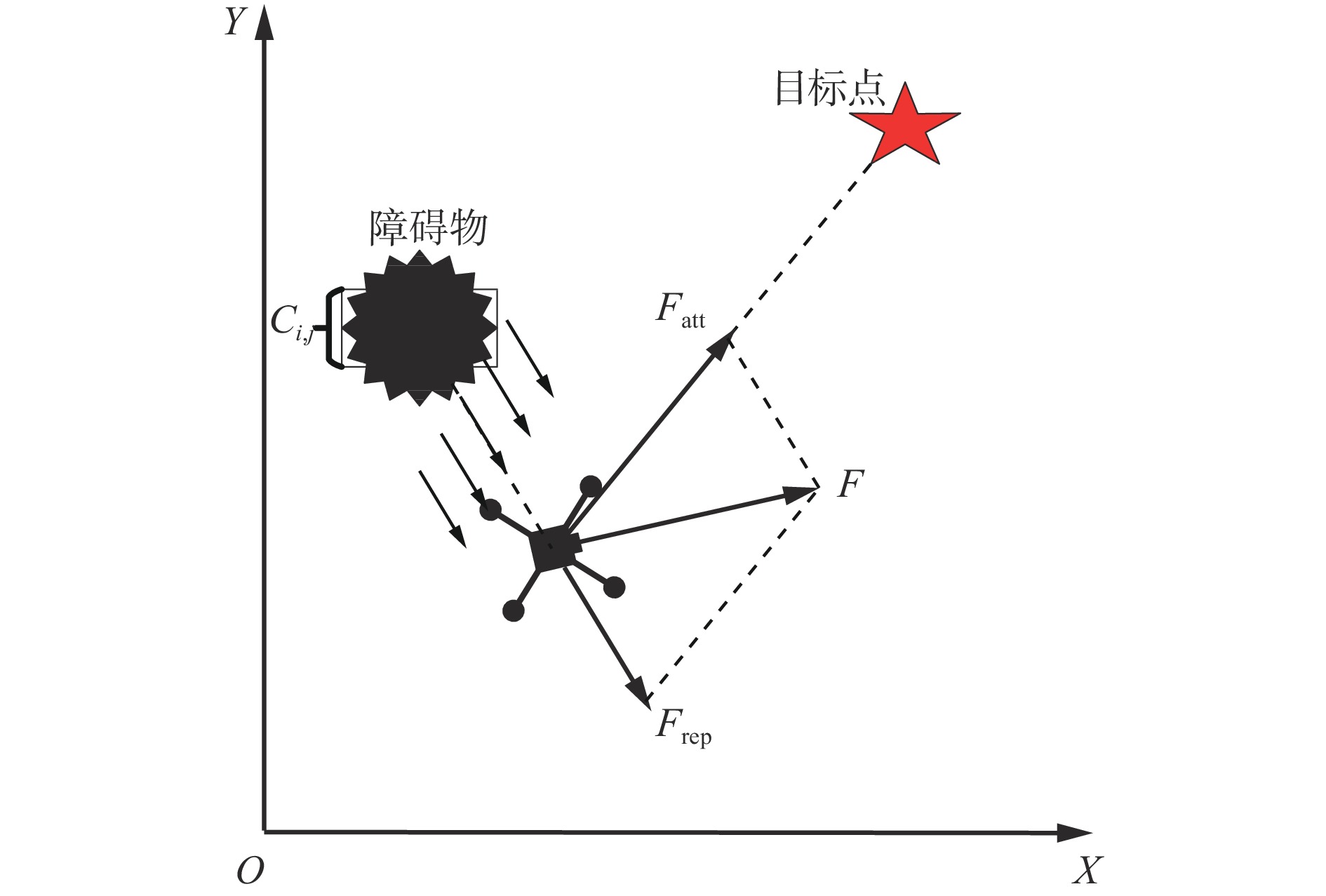
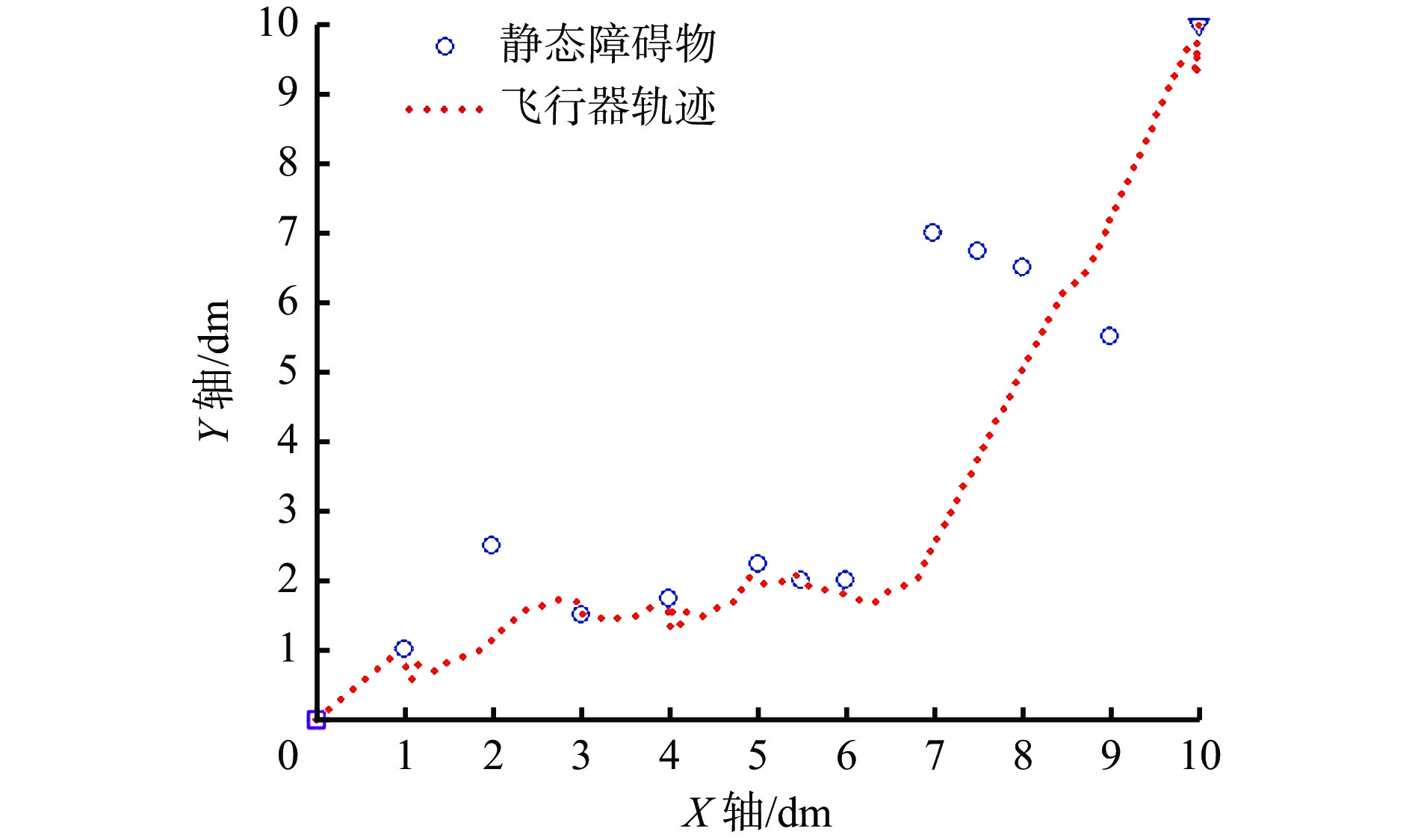
摘要: 多旋翼飞行器以其机械结构简单、可悬停和多方向飞行的优点,在煤矿井下生产巡检方面具有良好的应用前景。但多旋翼飞行器移动速度较快,飞行时易受外界各种因素的影响,难以建立精确的数学模型,使得飞行控制算法的设计较为复杂,现有基于激光雷达的同步定位与地图构建方法难以满足多旋翼飞行器快速飞行的实时性要求。针对上述问题,研究了一种利用虚拟远程操控技术对煤矿井下多旋翼飞行器进行避障的控制方法。构建了煤矿井下巷道多旋翼飞行器虚拟远程操控系统,根据煤矿巷道初始信息在虚拟远程操控系统中建立虚拟巷道模型及全局导航地图,获得飞行器移动过程中已知的静态障碍物信息,建立已知的静态环境模型,减少多旋翼飞行器运动过程中对环境感知建模的任务量,提高虚拟远程操控的运行效率。在巡检过程中,多旋翼飞行器通过自身携带的传感设备检测移动方向的动态障碍物信息,虚拟远程操控系统将动态障碍物信息实时重建于初始虚拟巷道模型中,对虚拟环境状态进行实时更新,为飞行器局部避障控制提供可靠的环境依据;虚拟远程操控系统通过读取障碍物与飞行器的位置数据和移动速度信息,采用复合虚拟势场(CVFF)避障控制算法进行避障路径规划,如果检测到前方障碍物对飞行器移动产生较大威胁,远程操控人员可根据规划的避障路径对飞行器进行远程干预,实现了自主避障飞行和人为远程干预控制。为提高飞行器对动态障碍物的感知效率和精度,在虚拟势场(VFF)算法的基础上引入飞行器与障碍物、目标点之间的相对速度影响,提出了一种CVFF避障控制算法。从静态和动态障碍物避障路径2个方面对CVFF避障控制算法进行仿真验证,结果表明:静态情况下,相比VFF算法,CVFF避障控制算法在减少了迭代次数的同时,也缩短了飞行器的轨迹长度;动态情况下,飞行器成功避开了提前设定的2个动态障碍物,顺利到达设定目标点,验证了采用CVFF算法的煤矿井下多旋翼飞行器避障控制方法的有效性。Abstract: Multi-rotor aircraft has a good application prospect in coal mine production inspection because of its advantages of simple structure, hovering and multi-directional flight. However, multi-rotor aircraft moves at a high speed, and the aircraft is easily influenced by various external factors during flying. It is difficult to establish a precise mathematical model. The design of a flight control algorithm is complicated. The existing synchronous positioning and map construction method based on laser radar is difficult to meet the real-time requirement of rapid flying of the multi-rotor aircraft. In view of the above problems, an obstacle avoidance control method of multi-rotor aircraft in coal mine by using remote virtual control technology is studied. The virtual remote control system of the multi-rotor aircraft in coal mine underground roadway is constructed. The virtual roadway model and the global navigation map are established in the virtual remote control system according to the initial information of the coal mine roadway. The known static obstacle information in the moving process of the aircraft is obtained, and the known static environment model is established. The task quantity of environment perception modeling in the moving process of the multi-rotor aircraft is reduced, and the operation efficiency of virtual remote control can be improved. In the inspection process, the multi-rotor aircraft detects dynamic obstacle information in the moving direction through sensing equipment carried by the multi-rotor aircraft. The remote control system reconstructs the dynamic obstacle information in an initial virtual roadway model in real-time according to obstacle data. The virtual environment state is updated in real-time to provide a reliable environment basis for local obstacle avoidance control of the aircraft. The remote control system uses the compound virtual force field (CVFF) obstacle avoidance control algorithm to plan the obstacle avoidance path by reading the positioning data and moving speed information of obstacles and aircraft. If the obstacle in front is detected to pose a great threat to the movement of the aircraft, the remote controller can implement remote intervention on the aircraft according to the planned obstacle avoidance path. The system realizes autonomous obstacle avoidance flight and human remote intervention control. In order to improve the perception efficiency and accuracy of aircraft to dynamic obstacles, a CVFF obstacle avoidance control algorithm is studied based on virtual force field (VFF) algorithm by introducing the influence of relative velocity between aircraft and obstacles and target points. The CVFF obstacle avoidance control algorithm is verified by simulation from two aspects of static and dynamic obstacle avoidance paths. The results show that under static conditions, compared with the VFF algorithm, the CVFF algorithm reduces the number of iterations and also shortens the trajectory length of the aircraft. Under dynamic conditions, the aircraft successfully avoids the two dynamic obstacles set in advance and successfully reaches the set target point. The effectiveness of the obstacle avoidance control method of multi-rotor aircraft using the CVFF algorithm is verified.
-
-
![]()
图 1 煤矿井下多旋翼飞行器虚拟远程操控系统组成
Figure 1. Composition of virtual remote control system of underground coal mine multi-rotor aircraft
![]()
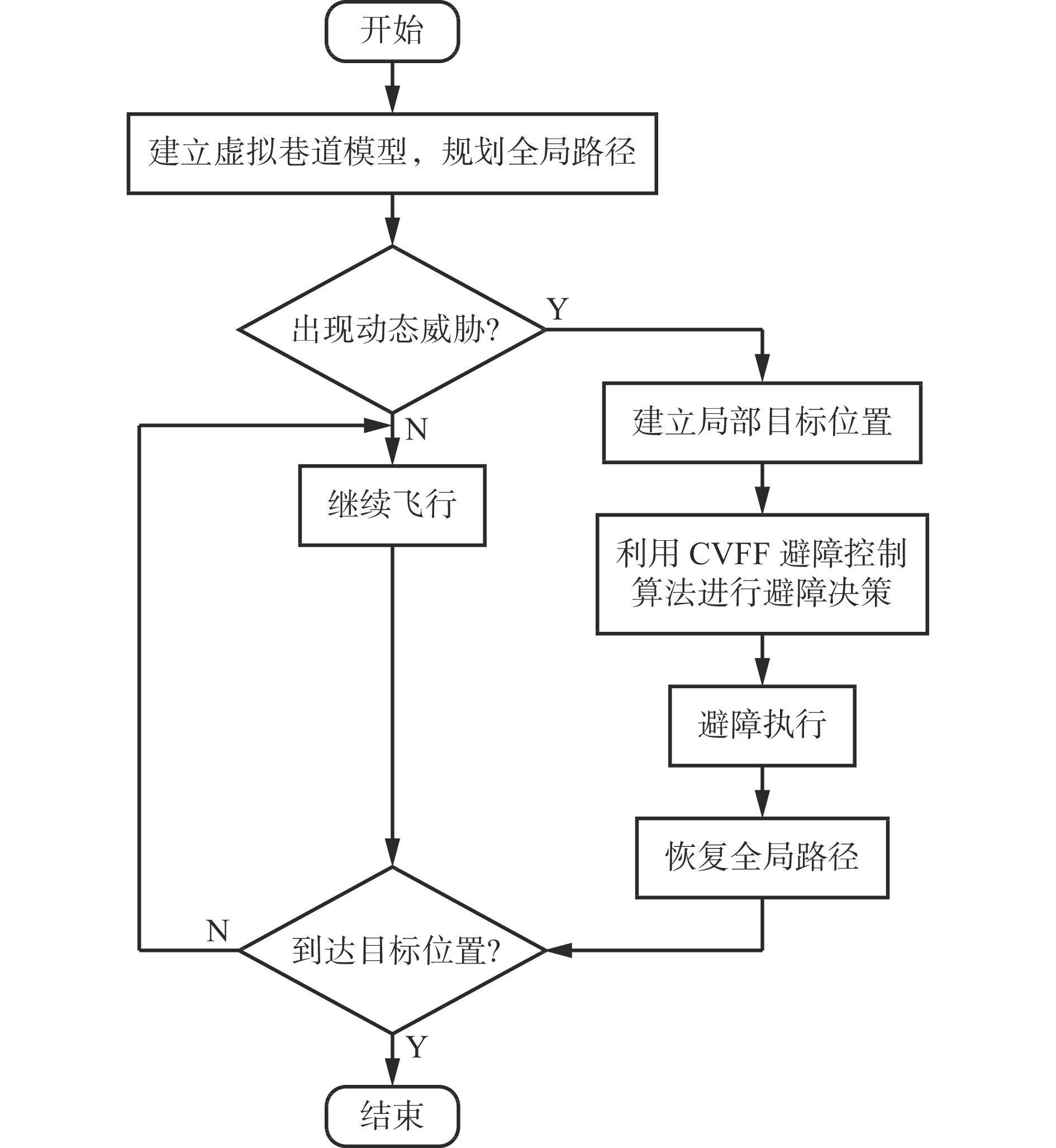
图 2 复杂环境下多旋翼飞行器避障控制流程
Figure 2. Obstacle avoidance control flow for multi-rotor aircraft in complex environment
![]()
图 6 多旋翼飞行器在复合虚拟势场中的受力
Figure 6. The force of multi-rotor aircraft in compound virtual force field
![]()
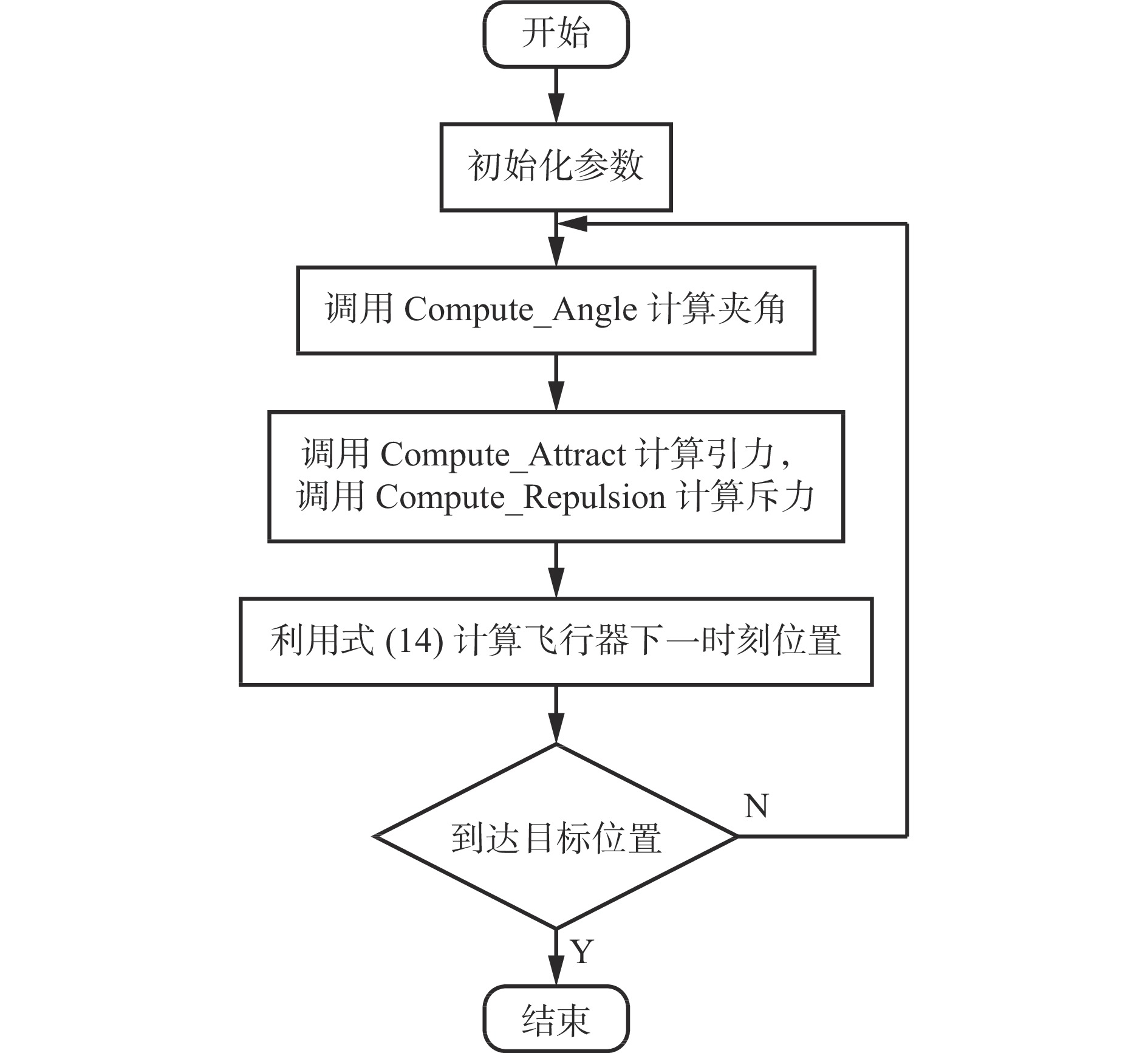
图 7 CVFF避障控制算法流程
Figure 7. Compound virtual force field obstacle avoidance control algorithm flow
![]()
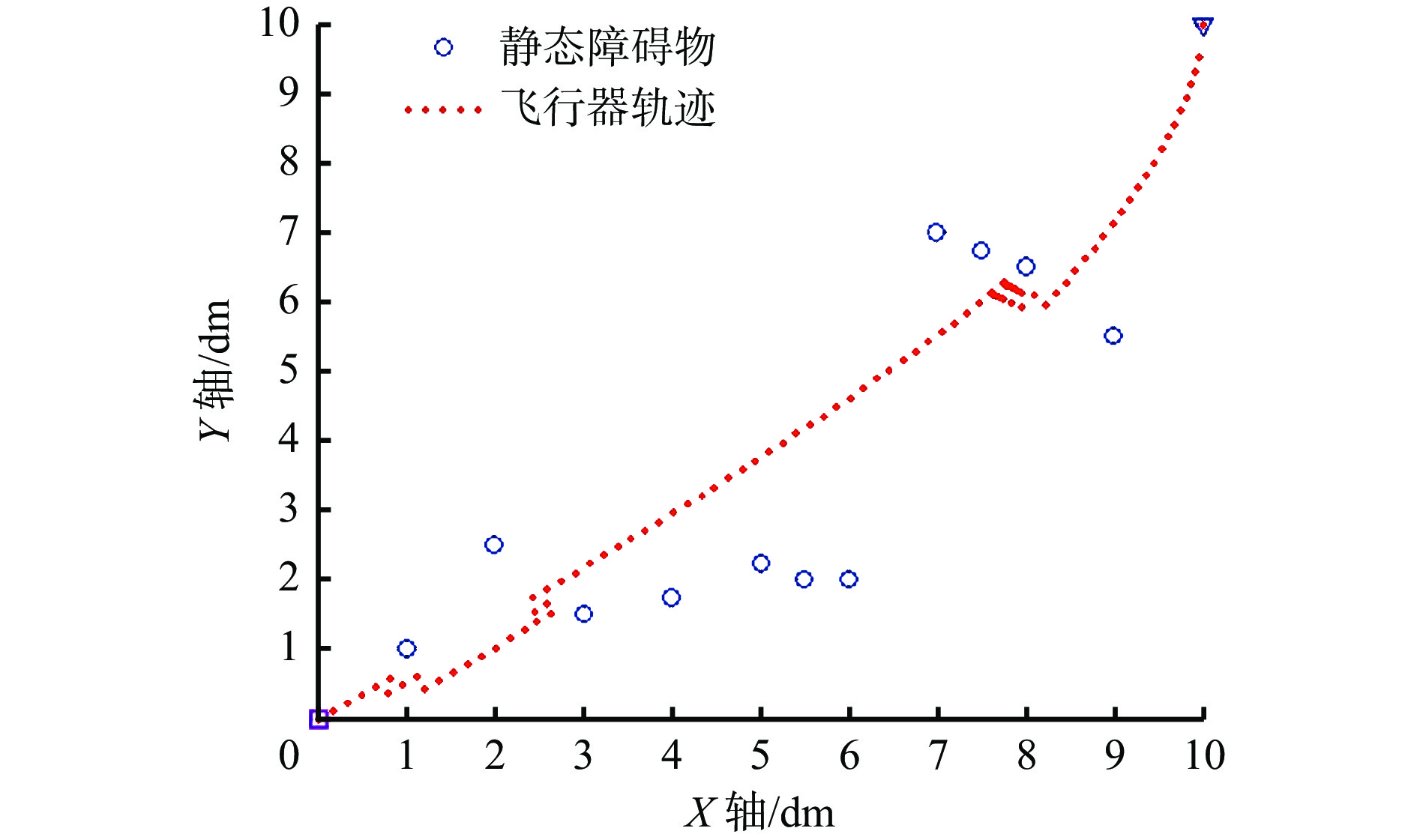
图 8
p0 =0.5时VFF算法仿真结果Figure 8. Simulation results of virtual force field algorithm when
p0 = 0.5![]()
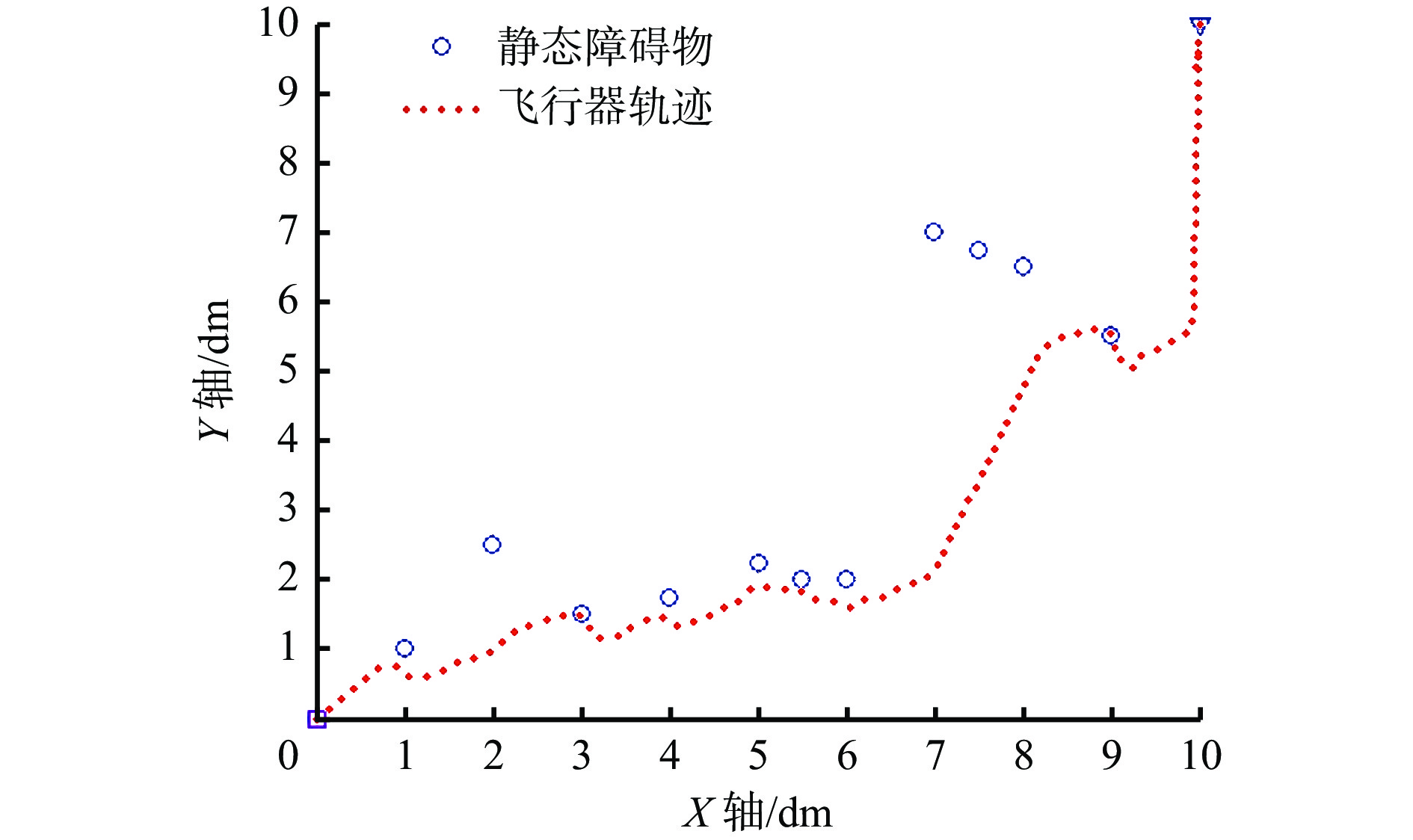
图 9
p0 =0.5时CVFF避障控制算法仿真结果Figure 9. Simulation results of compound virtual force field obstacle avoidance control algorithm when
p0 =0.5![]()
图 10
p0 =1时VFF算法仿真结果Figure 10. Simulation results of virtual force field algorithm when
p0 =1![]()
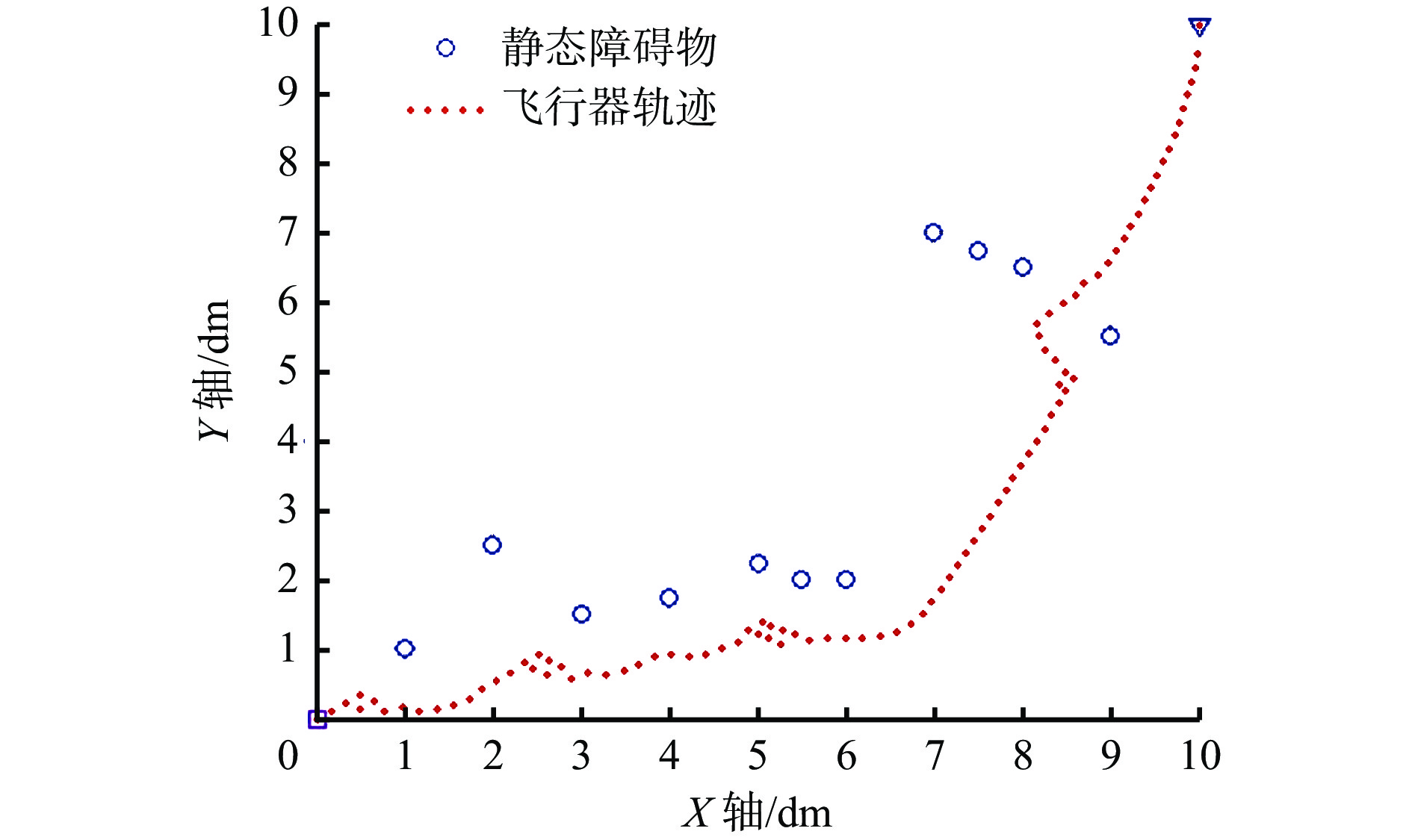
图 11
p0 =1时CVFF避障控制算法仿真结果Figure 11. Simulation results of compound virtual force field obstacle avoidance control algorithm when
p0 =1表 1 仿真环境参数
Table 1 Simulation environment parameters
参数名称 数值 位置势场引力增益系数Kp 13 速度势场引力增益系数Kv 15 位置势场斥力增益系数Mp 5 速度势场斥力增益系数Mv 7 步长l0/dm 1 迭代次数J 500 障碍物影响距离p0 0.5/1  下载: 导出CSV
下载: 导出CSV
表 2
p0 =0.5时2种算法性能比较Table 2 Performance comparison of two algorithms when
p0 =0.5算法 迭代次数 轨迹长度/dm VFF算法 75 19.175 CVFF避障控制算法 64 17.378
下载: 导出CSV
表 3
p0 =1时2种算法性能比较Table 3 Performance comparison of two algorithms when
p0 =1算法 迭代次数 轨迹长度/dm VFF算法 74 20.412 CVFF避障控制算法 62 19.036
下载: 导出CSV
-
[1] 陈维健, 曹茂永. 中国煤矿安全技术与管理丛书−煤矿安全装备篇[M]. 徐州: 中国矿业大学出版社, 2014. CHEN Weijian, CAO Maoyong. China coal mine safety technology and management series: coal mine safety equipment[M]. Xuzhou: China University of Mining and Technology Press, 2014.
[2] 贾勇骁,郑学召,崔嘉明,等. 煤田火灾无人机监测关键技术研究[J]. 工矿自动化,2019,45(9):30-33,53. DOI: 10.13272/j.issn.1671-251x.17473 JIA Yongxiao,ZHENG Xuezhao,CUI Jiaming,et al. Research on key technologies of unmanned aerial vehicle monitoring of coalfield fire[J]. Industry and Mine Automation,2019,45(9):30-33,53. DOI: 10.13272/j.issn.1671-251x.17473
[3] 吴文臻. 基于5G技术的矿用四旋翼巡检机器人设计[J]. 煤炭工程,2021,53(12):159-163. WU Wenzhen. Design of mine quadrotor inspection robot based on 5G technology[J]. Coal Engineering,2021,53(12):159-163.
[4] 张沛,孙运强,石喜玲. 应用于矿井的多旋翼飞行器姿态信息融合设计[J]. 煤炭技术,2016,35(5):279-281. DOI: 10.13301/j.cnki.ct.2016.05.115 ZHANG Pei,SUN Yunqiang,SHI Xiling. Fusion design of multi rotor aircraft attitude information used in coal mine[J]. Coal Technology,2016,35(5):279-281. DOI: 10.13301/j.cnki.ct.2016.05.115
[5] 王岩,马宏伟,王星,等. 基于迭代最近点的井下无人机实时位姿估计[J]. 工矿自动化,2019,45(9):25-29. DOI: 10.13272/j.issn.1671-251x.17441 WANG Yan,MA Hongwei,WANG Xing,et al. Real-time pose estimation of underground unmanned aerial vehicle based on ICP method[J]. Industry and Mine Automation,2019,45(9):25-29. DOI: 10.13272/j.issn.1671-251x.17441
[6] 郑学召,童鑫,张铎,等. 矿井危险区域多旋翼侦测无人机关键技术探讨[J]. 工矿自动化,2020,46(12):48-56. DOI: 10.13272/j.issn.1671-251x.17653 ZHENG Xuezhao,TONG Xin,ZHANG Duo,et al. Discussion on key technologies of multi-rotor detection UAVs in mine dangerous area[J]. Industry and Mine Automation,2020,46(12):48-56. DOI: 10.13272/j.issn.1671-251x.17653
[7] 贾文友,魏文涛,朱良恒,等. 移动机器人改进Dijkstra算法下路径规划及可视化研究[J]. 徐州工程学院学报(自然科学版),2021,36(2):34-38. JIA Wenyou,WEI Wentao,ZHU Liangheng,et al. Research on path planning and visualization of mobile robot based on improved Dijkstra algorithm[J]. Journal of Xuzhou Institute of Technology(Natural Sciences Edition),2021,36(2):34-38.
[8] 张旭辉,吕欣媛,王甜,等. 数字孪生驱动的掘进机器人决策控制系统研究[J]. 煤炭科学技术,2022,50(7):36-49. DOI: 10.13199/j.cnki.cst.2022-0176 ZHANG Xuhui,LYU Xinyuan,WANG Tian,et al. Research on decision control system of tunneling robot driven by digital twin[J]. Coal Science and Technology,2022,50(7):36-49. DOI: 10.13199/j.cnki.cst.2022-0176
[9] 杨林,马宏伟,王岩,等. 煤矿巡检机器人同步定位与地图构建方法研究[J]. 工矿自动化,2019,45(9):18-24. DOI: 10.13272/j.issn.1671-251x.17444 YANG Lin,MA Hongwei,WANG Yan,et al. Research on method of simultaneous localization and mapping of coal mine inspection robot[J]. Industry and Mine Automation,2019,45(9):18-24. DOI: 10.13272/j.issn.1671-251x.17444
[10] 张旭辉,王妙云,张雨萌,等. 数据驱动下的工业设备虚拟仿真与远程操控技术研究[J]. 重型机械,2018(5):14-17. DOI: 10.3969/j.issn.1001-196X.2018.05.005 ZHANG Xuhui,WANG Miaoyun,ZHANG Yumeng,et al. Virtual simulation and remote control technology with data-driven for industrial equipment[J]. Heavy Machinery,2018(5):14-17. DOI: 10.3969/j.issn.1001-196X.2018.05.005
[11] 董润霖. 煤矿探测机器人环境重建与虚拟操控技术研究[D]. 西安: 西安科技大学, 2018. DONG Runlin. Environmental reconstruction and virtual manipulation technology of coal mine detection robot[D]. Xi'an: Xi'an University of Science and Technology, 2018.
[12] 程旗,岳碧波. 无人机自主编队的人工力场控制方法[J]. 兵器装备工程学报,2018,39(8):88-91. DOI: 10.11809/bqzbgcxb2018.08.019 CHENG Qi,YUE Bibo. Artificial potential fields control method of UAV autonomous formation[J]. Journal of Ordnance Equipment Engineering,2018,39(8):88-91. DOI: 10.11809/bqzbgcxb2018.08.019
[13] GIANIBELLI A, CARLUCHO I, PAULA M D, et al. An obstacle avoidance system for mobile robotics based on the virtual force field method[C]. IEEE Biennial Congress of Argentina (ARGENCON), San Miguel de Tucuman, 2018: 1-8.
[14] 邓学强. 基于改进人工势场法的移动机器人路径规划[J]. 山东理工大学学报(自然科学版),2014,28(1):38-41. DENG Xueqiang. Path planning of mobile robot based on modified artificial potential field method[J]. Journal of Shandong University of Technology(Natural Science Edition),2014,28(1):38-41.
-
期刊类型引用(7)
1. 段树深. 基于ROI边缘图像直线特征的井下带式输送机跑偏故障检测方法. 中国矿业. 2024(10): 162-167 .  百度学术
百度学术
2. 高佳楠. 煤矿带式输送机仿真及撕带事故分析. 能源与环保. 2023(07): 254-258+272 . 百度学术
3. 文灵,谢元媛. 利用机器视觉远程监测煤矿带式输送机故障. 能源与环保. 2022(07): 201-205 . 百度学术
4. 尤阳阳,王晓华. 露天煤矿自动传送装置动态性能研究. 能源与环保. 2022(09): 271-275 . 百度学术
5. 张天山,陈跃朋,程宝军. 胶带运输机卸料装置优化设计应用. 技术与市场. 2021(09): 38-39 . 百度学术
6. 韦博,刘国春,李百成,李武强,万芳新. YXZ-40D型玉米果穗液压卸料装置设计. 农业机械. 2021(12): 78-81 . 百度学术
7. 王欣,徐智,王结群. 矿用梭车液压系统设计与仿真分析. 煤矿机械. 2020(09): 14-16 . 百度学术
其他类型引用(1)