
Image enhancement algorithm for non-uniform illumination in underground mines
-
摘要: 矿井井下视频采集过程中由于照明系统分布不均匀、环境中存在大量粉尘和雾气,导致监控画面图像存在局部光线过曝、局部亮度不足、对比度低和边缘信息弱等问题。针对上述问题,提出了一种矿井井下非均匀照度图像增强算法。该算法基于Retinex−Net网络结构改进,具体包括非均匀光照抑制模块(NLSM)、光照分解模块(LDM)和图像增强模块(IEM)3个部分:NLSM对图像中人工光源局部非均匀光照进行抑制;LDM将图像分解为光照层和反射层;IEM对图像光照层增强,经伽马校正,最终得到增强图像。在NLSM和LDM中均采用Resnet作为网络基础架构,并顺序引入了卷积注意力机制中通道注意力模块和空间注意力模块,以增强对图像光照特征关注度和特征选择的效率。实验结果表明:① 选取MBLLEN,RUAS,zeroDCE,zeroDCE++,Retinex−Net,KinD++及非均匀照度图像增强算法对多种场景(井下运输环境场景、单光源巷道场景、多光源巷道场景、矿石场景)图像进行增强处理及定性分析,分析结果指出非均匀照度图像增强算法能够避免人工光源区域的过度增强,未在光源区域产生晕染和模糊现象,不易产生色偏,对比度适中,画面视觉效果更真实。② 选取信息熵(IE)、平均梯度(AG)、标准差(SD)、自然图像质量评价指标 (NIQE)、结构相似性(SSIM)和峰值信噪比(PSNR)作为评价指标,定量比较图像增强画面质量。结果表明非均匀照度图像增强算法在多种场景下处于相对领先地位。③ 消融实验结果表明,非均匀照度图像增强算法在NIQE,SSIM,PSNR这3个评价指标上均获得了最优结果。Abstract: Due to the non-uniform distribution of lighting systems and the presence of a large amount of dust and mist in the environment during the underground video collection process, there are problems with local light overexposure, insufficient brightness, low contrast, and weak edge information in the monitoring image. In order to solve the above problems, an image enhancement algorithm for non-uniform illumination in underground mines is proposed. This algorithm is based on the improvement of Retinex-Net network structure, which includes three parts: non-uniform illumination suppression module (NLSM), illumination decomposition module (LDM), and image enhancement module (IEM). Among them, NLSM suppresses local non-uniform illumination of artificial light sources in the image. LDM decomposes the image into light and reflection layers. IEM enhances the illumination layer of the image, undergoes gamma correction, and ultimately obtains the enhanced image. Resnet is adopted as the infrastructure of the network in both NLSM and LDM. The channel attention module and spatial attention module in the convolutional attention mechanism are sequentially introduced to enhance the attention to image lighting features and the efficiency of feature selection. The experimental results show the following points. ① MBLLEN, RUAS, zeroDCE, zeroDCE++, Retinex−Net, KinD++, and non-uniform illumination image enhancement algorithms are selected to enhance and qualitatively analyze images in various scenarios (underground transportation environment, single light source roadway, multi light source roadway, ore scenario). The analysis results indicate that non-uniform illumination image enhancement algorithms can avoid excessive enhancement of artificial light source areas. There is no halo or blurring phenomenon in the light source area, and colors are not prone to color deviation. The contrast is moderate, and the visual effect of the image is more realistic. ② The information entropy (IE), average gradient (AG), standard deviation (SD), naturalness image quality evaluator (NIQE), structural similarity (SSIM), and peak signal-to-noise ratio (PSNR) are selected as evaluation indicators to quantitatively compare the quality of image enhancement images. The non-uniform illumination image enhancement algorithm is also in a relatively leading position in various scenarios. ③ The ablation experimental results show the non-uniform illumination image enhancement algorithm achieves optimal results on three evaluation indicators: NIQE, SSIM, and PSNR.
-
0. 引言
随着矿山智能化建设推进,视频监控等工具逐步成为辅助安全生产的必要设备[1-4]。由于矿井井下环境自然光照严重不足,主要依赖人工照明来辅助工作面照明。大量粉尘和水雾及复杂的光线,使监控视频图像存在对比度过低、光照不均匀、信息捕捉不足和细节模糊等问题[5],严重制约了井下视频监控的实际应用。因此,针对矿井井下视频中存在的光照不均等问题进行图像增强具有现实意义。
目前,矿井井下图像增强算法可分为传统图像增强算法和基于深度学习的图像增强算法。传统图像增强算法主要包括基于直方图分布的图像增强算法和基于Retinex[6] 理论的图像增强算法。基于直方图分布的图像增强算法是对图像像素直方图进行重分布,其中以限制性对比度增强 (Contrast Limited Adaptive Histogram Equalization,CLAHE)[7] 应用最为广泛。基于直方图分布的图像增强算法复杂度低,但在图像局部区域易引起色彩失真和过度增强[8-9]。Retinex理论认为人眼观察到的图像由反射层和光照层2个图像乘积构成。因此,基于Retinex理论的图像增强算法与基于直方图分布的图像增强算法的主要区别在于对光照层的求解方式。现有的Retinex算法主要对在单一自然光环境下的图像增强进行研究,当图像中存在人工光源时,在局部区域的光照层求解时易出现色彩失真、噪点过多和细节模糊等问题 [10]。
随着深度学习和卷积神经网络技术的发展,基于Retinex理论的Retinex−Net网络结构应运而生[11]。基于卷积神经网络的方法对图像中的反射层和光照层进行有效估计,使网络模型获得学习反射层和光照层的拟合能力,该方法有效延展了Retinex理论的应用范围。赵征鹏等[12] 采用改进的去噪卷积神经网络对弱光环境下图像的反射分量进行去噪。武亚红[13] 利用场景分割技术将图像分割聚类,并在颜色通道上通过比例系数对图像光照层进行初始估计,在边缘处对图像光照层进行非局部相似性约束。姜雪松[14] 提出了一种基于稠密连接网络的图像增强方法,可恢复极低照度区域细节信息。
虽然在神经网络技术的推动下,基于Retinex理论的图像增强算法取得了一定进步,但在处理矿井井下非均匀照度图像时,仍存在局部光线过曝、局部亮度不足、对比度低和边缘信息弱等问题。针对上述问题,本文提出了一种矿井井下非均匀照度图像增强算法。该算法在Retinex−Net网络结构的基础上,新增了非均匀光照抑制模块(Non−uniform Light Suppression Module, NLSM)来剥离非均匀照度区域的光照层,并优化了光照分解模块(Light Decomposition Module, LDM)和图像增强模块(Image Enhancement Module, IEM),以增强图像中的细节信息。
1. 相关理论
1.1 Retinex理论
Retinex理论是Land等基于人类视觉系统提出的关于如何调整感知对象颜色和亮度的理论模型[6]。该理论指出,人类视觉感知到的颜色具有恒常性(同一个物体在不同光照情况下虽然会产生不同的反射光谱,但人类视觉系统会将一定范围内的不同光照条件下物体的颜色认为是恒定不变的)。基于Retinex理论,一张图像可被分解为光照层和反射层,其中光照层包含了图像中的光照信息,反射层则包含了物体的颜色和形状轮廓等,最易被人眼所认为恒常的基本信息。 因此,基于Retinex理论的图像增强算法将图像分解为反射层和光照层的乘积[6]。
$$ S(x,y) = R(x,y) \times I(x,y) $$ (1) 式中:S(x,y)为原始图像;x和y为图像中像素位置;R(x,y)为反射层信息,即物体本身信息;I(x,y)为光照层信息,即环境光信息。
1.2 Retinex−Net
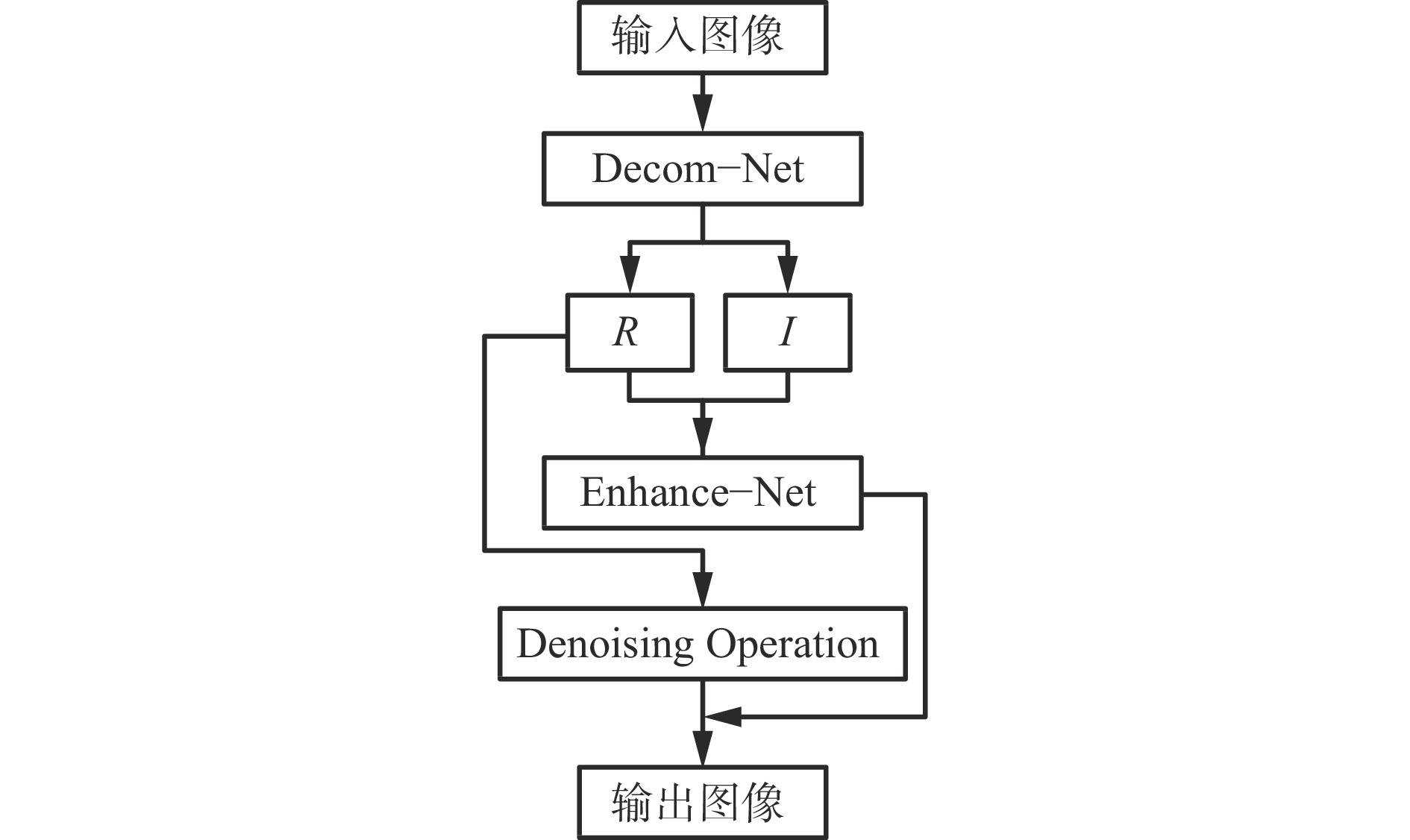
Retinex−Net[15] 分为分解、调整和重构3个部分,如图1所示。首先通过Decom−Net将输入图像分解为反射层R和光照层I。然后在Enhance−Net中对光照层I进行多尺度照度调节,在Denoising Operation阶段对反射层R上的噪声进行去除。最后将R×I作为输出图像。
Retinex−Net在Decom−Net中对图像的梯度进行最小化,光照层会被过渡平滑变得模糊。因此,Retinex−Net算法会在图像光照层变化区域产生明显的光晕和色彩失真。直接将Retinex−Net算法应用于矿井井下图像的增强,其效果并不理想。
2. 非均匀照度图像增强算法
2.1 整体网络结构
基于传统Retinex理论构建Retinex−Net网络,在估计光照层时,先验的认为光照层应在细节处保持平滑,即光照层整体分布相对均匀。但在人工光源环境下,Retinex−Net网络估计的光照与真实环境的光照之间存在较大偏差,在光照不均匀的区域偏差显著。因此,当真实环境中的光照分布不均匀,Retinex−Net的先验假设不再成立,Retinex−Net图像增强算法也不再适用。
矿井井下光照可分为相对均匀但照度低的自然光源和若干个亮度变化剧烈且只存在于图像局部区域的照度不均匀的人工光源。因此,本文将图像分解为自然光照层、反射层和非均匀光照层,3个图层之间的计算关系为
$$ S(x,y) = R(x,y) \times I(x,y) + E(x,y) $$ (2) 式中E(x,y)为非均匀光照层,即人工光源在图像中局部突出的光照图层。
基于式(2),本文设计了一种矿井井下非均匀照度图像增强算法,算法整体网络结构如图2所示。
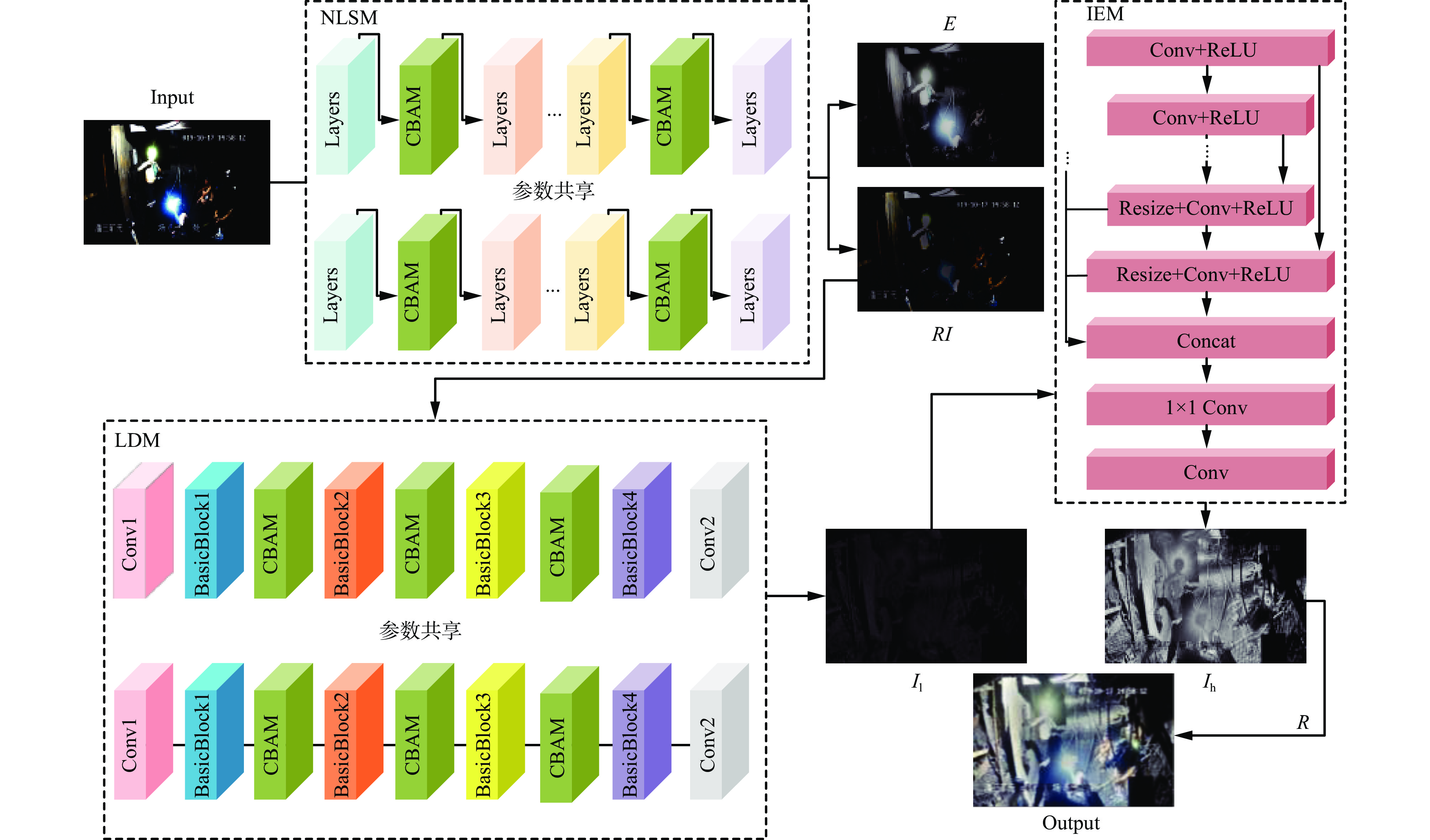
![]() 图 2 非均匀照度图像增强算法整体网络结构Figure 2. Overall network structure of the non-uniform illumination image enhancement algorithm
图 2 非均匀照度图像增强算法整体网络结构Figure 2. Overall network structure of the non-uniform illumination image enhancement algorithm以矿井井下图像作为非均匀照度图像增强算法网络的输入,以增强后图像为输出,整体结构分为NLSM,LDM,IEM 3个主体部分。其中NLSM为针对矿井井下非均匀光照而设计的模块,该模块对图像中存在的非均匀光照区进行剔除,将图像分解为非均匀光照层E(x,y)和R(x,y)×I(x,y)。LDM是以Retinex−Net中分解模块为原型,依托Resnet[16]网络结构改进而来,主要作用是将NLSM输出的R×I分解为反射层R和低照度下的光照层Il。IEM[15]由Retinex−Net中原有光照增强结构结合伽马校正实现,该模块将低照度下的光照层Il增强为正常照度下的光照层Ih。将R与Ih相乘即可得到增强后图像。
2.2 NLSM
人工光源的存在会导致Retinex−Net在估计光照层I时,极易在非均匀光照区域过度平滑,导致在该区域图像色彩失真和亮度过曝。为解决局部区域光照不均匀引起的过度增强问题,本文设计了NLSM,该模块主要作用在于估计和剥离非均匀光照层,避免在该区域LDM的错误估计和IEM的过度增强。
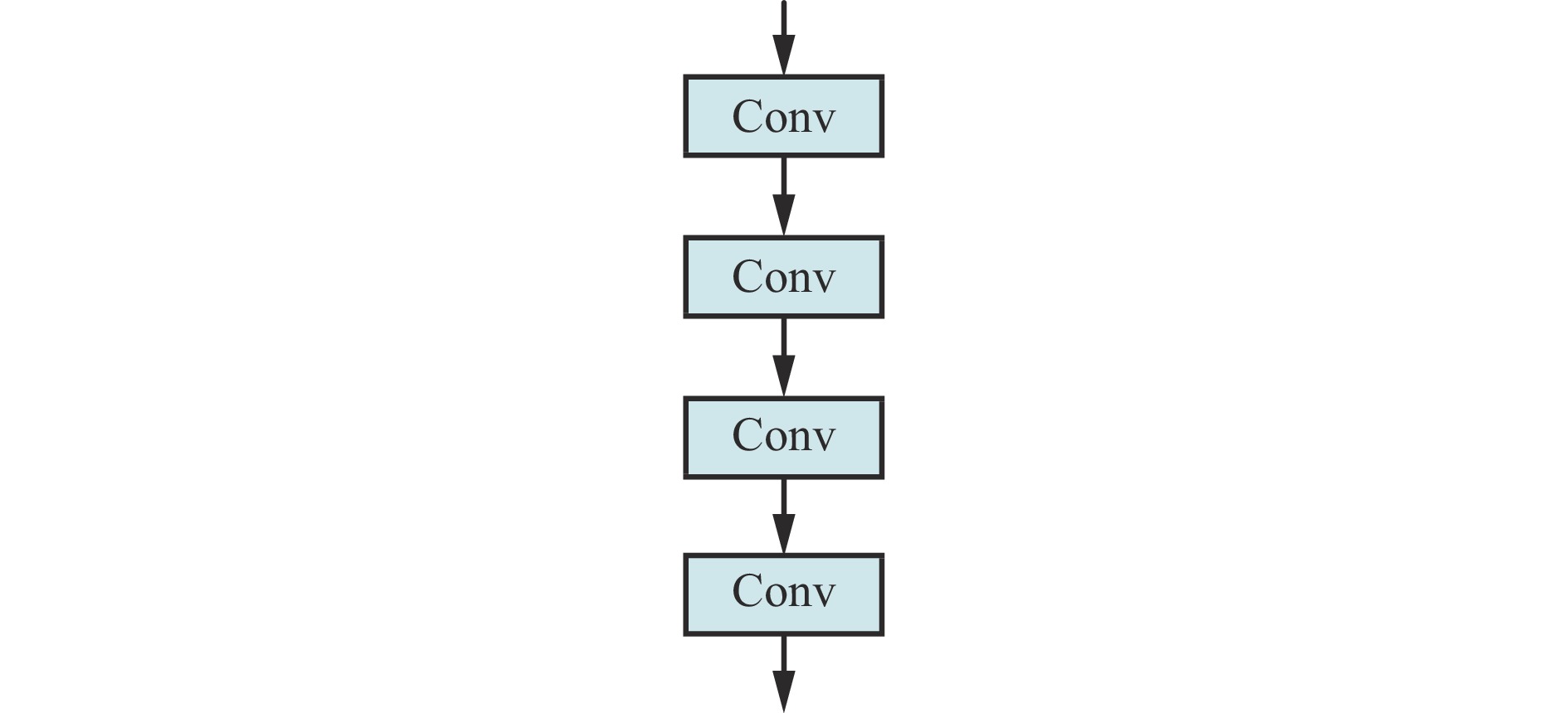
在NLSM中共有7个Layers,Layers由4个卷积层构成,如图3所示。第1层Layers由大小为3×3卷积核、通道数为8、Stride为1、padding为1、以ReLU为激活函数的卷积层构成;第2层Layers由大小为3×3卷积核、通道数为16、Stride为1、padding为1、以Sigmoid为激活函数的卷积层构成;第3层Layers由大小为5×5卷积核、通道数为32、Stride为1、padding为2、以ReLU为激活函数的卷积层构成;第4层Layers由大小3×3卷积核、通道数为64、Stride为1、padding为1、以ReLU为激活函数的卷积层构成;第5层Layers由大小为5×5卷积核、通道数为32、Stride为1、padding为2、以ReLU为激活函数的卷积层构成;第6层Layers由大小为3×3卷积核、通道数为16、Stride为1、padding为1、以Sigmoid为激活函数的卷积层构成;第7层Layers由大小为3×3卷积核、通道数为3、Stride为1、padding为1、以ReLU作为激活函数的卷积层构成。
2.3 注意力机制
在NLSM中,人工光源的特征不仅在空间分布上呈现局部突出的特征,在颜色通道上也呈现出相似的特征。因此,引入卷积块注意力模块(Convolutional Block Attention Module,CBAM),增强网络结构对特征信息在空间和通道上分布特征的学习能力和泛化能力,有助于更快、更准确地定位人工光源特征,有利于加快引导网络正确聚焦于目标区域。CBAM结构[17]如图4 所示。
CBAM由通道注意力模块(Channel Attention Module, CAM)和空间注意力模块(Spatial Attention Module, SAM)组成。CAM旨在对输入的通道维度进行注意力权重计算,将注意力集中在重要的通道上,而非全局通道平均输入到下一层网络中。SAM通过对输入的空间维度进行注意力权重计算,将注意力集中在重要的空间区域上。井下图像由于光照条件差,图像中边缘信息较弱,导致图像细节信息丢失和整体画面模糊。CBAM注意力机制可通过CAM和SAM自适应地提升重要特征的权重,使模型能够更好地感知和强调图像中的细节信息,从而提高图像的可见度和清晰度。
2.4 LDM
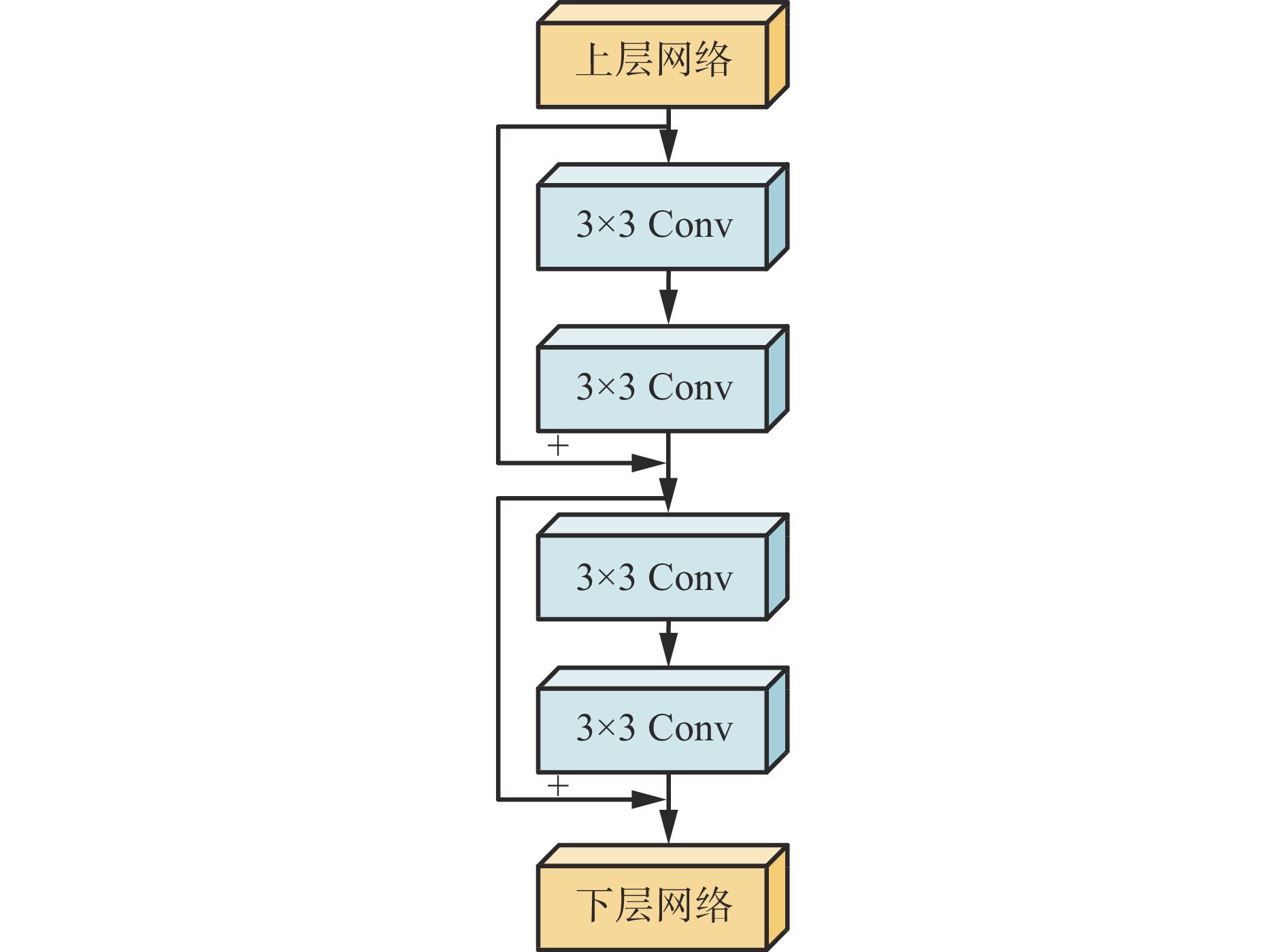
LDM输入部分为上一层网络结构剥离非均匀光照层E之后的三通道图像,输出结果为物体反射层R和低照度场景下的均匀光照层Il。LDM中BasicBlock结构参考Resnet18[16],如图5所示。
LDM中Conv1和Conv2卷积核大小分别为5×5和3×3,通道数分别为8和3,Stride均为1,padding分别为2和1,均以ReLU为激活函数。
2.5 损失函数
本文使用的损失函数L主要包括NLSM损失$ L_{{\mathrm{nlsm}}} $、LDM损失$ L_{{\mathrm{ldm}}} $和IEM损失$ L_{{\mathrm{iem}}} $3个部分。
$$ L = {L_{{\mathrm{nlsm}}}} + {L_{{\mathrm{ldm}}}} + {L_{{\mathrm{iem}}}} $$ (3) NLSM主要功能在于剥离图像中存在的非均匀光照,因此,非均匀光照剥离前后图像整体结构损失应尽可能小且图像损失函数应对异常值具备一定鲁棒性。
$$ {L_{{\mathrm{nlsm}}}} = {L_{{\mathrm{ssim}}}} + {\lambda _{\mathrm{e}}}{L_{\mathrm{e}}} $$ (4) 式中:Lssim为结构相似性(Structural Similarity,SSIM)损失函数[18];$\lambda $e为超参数,取0.001;Le为非均匀光照剥离损失函数,计算方法与Retinex−Net中不变反射率[15]一致。
3. 实验及结果分析
3.1 实验条件
为验证本文算法的有效性,使用Pytorch框架实现算法。配置环境:Ubuntu22.04操作系统,32 GiB内存,CPU为Intel(R) i7−10700F,GPU为NVIDIA GTX 2080TI×2。网络训练采用分阶段策略,首先训练NLSM,然后训练LDM,最后训练IEM。训练批次大小为16,迭代轮次为300,初始化学习率为0.001,使用Adam优化器自适应调整学习率。数据集为CUMT−CMUID图像和自采井下图像,共计1 100 张图像,选取其中800 张作为训练和测试,其他300张作为验证集,并对训练和测试数据进行k折交叉验证。
3.2 增强效果定性对比分析
为验证本文算法在非均匀光照场景下的有效性和在正常亮度环境下的鲁棒性,选取MBLLEN[18],RUAS[19],zeroDCE[20],zeroDCE++[21],Retinex−Net[15],KinD++[22]及本文算法对多种场景(场景1为井下运输环境、场景2为单光源巷道、场景3为多光源巷道、场景4为矿石)图像进行增强处理及定性分析。井下场景中存在1种或多种光源提供照明。
各算法增强结果如图6所示。可看出MBLLEN算法在灯光照射区域易产生局部亮度过度增强,导致该区域整体偏白;对环境中光线变化不敏感,人员反光带出模糊现象(如场景2)。RUAS算法在灯光照射区域会被增强为白色团块从而丢失原有图像信息,且当环境中灯光存在一定色差时,RUAS算法会偏向于增强色差,丢失物体原有色彩信息,如场景4中显示整体矿石色彩偏紫。zeroDCE算法在图像色彩还原和控制局部过曝区域方面效果显著,但相比其他模型,zeroDCE算法在提升整体画面亮度和暗部细节方面效果最弱。zeroDCE++算法光线边缘信息保留充分,相较于zeroDCE算法画面清晰度有所提升,但在人工光源区域产生了物体纹理和物体色彩丢失现象,如场景4中红色放大区域光线照射出岩壁纹理丢失和场景2中反光带间隙缺失。Retinex−Net算法增强图像整体色彩对比度过高、画面色彩与实际物体信息灯光色彩之间存在较大差异,且人工光源区域周围出现环形波纹及晕染现象,导致画面局部模糊。KinD++算法画面整体亮度增强程度适中,但在局部人工光源与Retinex−Net算法近似,同样存在着晕染和模糊现象。本文算法能够避免人工光源区域的过度增强,未在光源区域产生晕染和模糊现象,不易产生色偏,对比度适中,画面视觉效果更真实。
![]() 图 6 不同算法增强结果及局部放大图Figure 6. Enhancement results and local enlarged images of different algorithms
图 6 不同算法增强结果及局部放大图Figure 6. Enhancement results and local enlarged images of different algorithms3.3 增强效果定量对比分析
采用图像信息熵(Information Entropy,IE)、平均梯度(Average Gradient,AG)、标准差(Standard Deviation,SD)、自然图像质量评价指标[23] (Naturalness Image Quality Evaluator,NIQE)、SSIM和峰值信噪比[24] (Peak Signal-to-Noise Ratio,PSNR)作为评价指标,定量比较图像增强画面质量。IE代表图像中包含有效信息的多少;AG体现了图像中边缘细节的变化速率,一定范围内AG越大,图像越清晰;SD反映了图像对比度的大小;NIQE更能准确反映图像质量与人眼感官之间的联系;SSIM用来评估画面亮度、对比度和结构3个方面的相似性;PSNR是衡量图像噪声和有效信息之间关系的客观指标。上述指标除NIQE外,数值越大,对应图像质量越好。选取上述4种不同场景的图像作为算法输入,各算法在图像上的评价指标结果见表1。
表 1 不同算法评价指标结果Table 1. Evaluation index results of different algorithms场景 算法 IE AG SD NIQE SSIM PSNR 场景 算法 IE AG SD NIQE SSIM PSNR 1 MBLLEN 6.17 60.09 60.68 6.86 0.48 12.62 3 MBLLEN 6.69 32.1 62.65 4.74 0.55 11.36 RUAS 4.57 41.19 83.71 6.16 0.6 15.22 RUAS 5.46 27.22 54.38 4.54 0.67 11.45 zeroDCE 5.26 48.65 72.17 5.41 0.61 15.08 zeroDCE 5.99 38.04 49.01 3.96 0.45 15.49 zeroDCE++ 5.28 48.83 76.09 5.74 0.6 15 zeroDCE++ 6.05 40.44 52.41 4.02 0.4 14.71 Retinex−Net 6.12 63.43 61.39 4.8 0.23 12.35 Retinex−Net 6.48 51.16 47.05 4.82 0.22 10.76 KinD++ 5.73 56.52 70.77 5.15 0.59 15.18 KinD++ 6.18 52.7 50.75 4.52 0.4 14.06 本文算法 6.24 67.68 70.37 4.7 0.57 15.27 本文算法 7.32 54.56 49.65 3.88 0.56 17.5 2 MBLLEN 6.7 34.92 46.96 5.04 0.36 11.43 4 MBLLEN 7.43 56.77 64.38 3.88 0.43 11.74 RUAS 5.23 28.59 52.28 5.07 0.7 16.84 RUAS 6.44 86.72 83.13 4.17 0.58 11.91 zeroDCE 5.59 38.06 48.07 4.68 0.5 16.14 zeroDCE 6.82 80.49 60.01 3.72 0.49 11.86 zeroDCE++ 5.73 39.34 52.71 4.76 0.43 14.57 zeroDCE++ 6.98 81.57 67.97 3.56 0.47 12.29 Retinex−Net 6.36 55.8 47.17 4.77 0.14 11.44 Retinex−Net 7.18 116.6 53.61 4.72 0.24 10.32 KinD++ 6.02 50.15 51.35 4.65 0.46 14.3 KinD++ 7.05 105.6 59.59 3.93 0.44 12.12 本文算法 7.31 31.49 63.34 4.13 0.56 11.83 本文算法 7.71 55.7 55.7 3.29 0.28 12.78 上述场景1−4图像数量占比分别为24.75%,27.75%,22.5%,25%。本文对4个场景所有图像进行定量分析,结合场景占比与表1数据可看出,本文算法与MBLLEN,RUAS,zeroDCE,zeroDCE++,RetinexNet,KinD++相比在IE上分别提升了5.87%,32.68%,21.41%,19.49%,9.39%,14.64%,在AG上分别提升了15.67%,32.39%,6.96%,3.94%,−21.99%,−16.46%,在SD上分别提升了5.59%,−8.28%,6.70%,−1.96%,15.35%,4.22%,在NIQE上分别降低了20.69%,19.56%,9.85%,10.84%,16.20%,12.52%,在SSIM上分别提升了11.75%,−23.41%,−3.51%,6.05%,158.78%,5.10%,在PSNR上分别提升了20.54%,5.54%,−2.24%,0.49%,26.85%,2.22%。因此,从NIQE指标可看出,本文算法整体优于其他算法;在其他评价指标上,本文算法在多种场景下也处于相对领先地位。
3.4 消融实验
为进一步验证本文算法的有效性和稳定性,设计了消融实验,结果见表2。其中算法1为Retinex−Net,算法2在算法1基础上引入Resnet,算法3为算法2加入CBAM,本文算法为算法3加入NLSM。
表 2 消融实验Table 2. Ablation experiment算法 IE AG SD NIQE SSIM PSNR 算法1 6.53 71.84 52.27 4.78 0.21 11.23 算法2 6.35 62.47 56.49 4.59 0.48 13.65 算法3 7.02 60.70 62.02 4.13 0.48 13.85 本文算法 7.15 51.69 60.09 4.00 0.49 14.19 由表2可知,与原始Retinex−Net结构相比,本文算法在改进后,IE,SD,NIQE,SSIM,PSNR等指标整体得到提升,效果更优。在AG指标上,原始算法的值过高,这与画面整体色彩异常有关。本文算法在NIQE,SSIM,PSNR这3个评价指标上均获得了最优结果。
4. 结论
1) 针对矿井井下图像的特点,提出了一种非均匀照度图像增强算法。该算法通过NLSM可有效估计出图像中人工光源区域,并实现了对该区域非均匀光照层的去除。在Retinex−Net网络结构基础上,分别引入了Resnet和CBAM注意力机制,增强了网络对图像光照层的特征学习能力。
2) 在多种场景下采用MBLLEN,RUAS,zeroDCE,zeroDCE++,Retinex−Net,KinD++及非均匀照度图像增强算法对图像进行增强处理及定性分析,结果表明:非均匀照度图像增强算法能够避免人工光源区域的过度增强,未在光源区域产生晕染和模糊现象,不易产生色偏,对比度适中,画面视觉效果更真实。
3) 实验选取IE,AG,SD,NIQE,SSIM,PSNR作为评价指标,定量比较图像增强画面质量。结果表明,非均匀照度图像增强算法在IE,SD,NIQE,SSIM,PSNR等指标上优于其他对比算法。
4) 消融实验结果表明,非均匀照度图像增强算法在NIQE,SSIM,PSNR这3个评价指标上均获得了最优结果。
-
![]()
图 2 非均匀照度图像增强算法整体网络结构
Figure 2. Overall network structure of the non-uniform illumination image enhancement algorithm
![]()
图 6 不同算法增强结果及局部放大图
Figure 6. Enhancement results and local enlarged images of different algorithms
表 1 不同算法评价指标结果
Table 1 Evaluation index results of different algorithms
场景 算法 IE AG SD NIQE SSIM PSNR 场景 算法 IE AG SD NIQE SSIM PSNR 1 MBLLEN 6.17 60.09 60.68 6.86 0.48 12.62 3 MBLLEN 6.69 32.1 62.65 4.74 0.55 11.36 RUAS 4.57 41.19 83.71 6.16 0.6 15.22 RUAS 5.46 27.22 54.38 4.54 0.67 11.45 zeroDCE 5.26 48.65 72.17 5.41 0.61 15.08 zeroDCE 5.99 38.04 49.01 3.96 0.45 15.49 zeroDCE++ 5.28 48.83 76.09 5.74 0.6 15 zeroDCE++ 6.05 40.44 52.41 4.02 0.4 14.71 Retinex−Net 6.12 63.43 61.39 4.8 0.23 12.35 Retinex−Net 6.48 51.16 47.05 4.82 0.22 10.76 KinD++ 5.73 56.52 70.77 5.15 0.59 15.18 KinD++ 6.18 52.7 50.75 4.52 0.4 14.06 本文算法 6.24 67.68 70.37 4.7 0.57 15.27 本文算法 7.32 54.56 49.65 3.88 0.56 17.5 2 MBLLEN 6.7 34.92 46.96 5.04 0.36 11.43 4 MBLLEN 7.43 56.77 64.38 3.88 0.43 11.74 RUAS 5.23 28.59 52.28 5.07 0.7 16.84 RUAS 6.44 86.72 83.13 4.17 0.58 11.91 zeroDCE 5.59 38.06 48.07 4.68 0.5 16.14 zeroDCE 6.82 80.49 60.01 3.72 0.49 11.86 zeroDCE++ 5.73 39.34 52.71 4.76 0.43 14.57 zeroDCE++ 6.98 81.57 67.97 3.56 0.47 12.29 Retinex−Net 6.36 55.8 47.17 4.77 0.14 11.44 Retinex−Net 7.18 116.6 53.61 4.72 0.24 10.32 KinD++ 6.02 50.15 51.35 4.65 0.46 14.3 KinD++ 7.05 105.6 59.59 3.93 0.44 12.12 本文算法 7.31 31.49 63.34 4.13 0.56 11.83 本文算法 7.71 55.7 55.7 3.29 0.28 12.78  下载: 导出CSV
下载: 导出CSV
表 2 消融实验
Table 2 Ablation experiment
算法 IE AG SD NIQE SSIM PSNR 算法1 6.53 71.84 52.27 4.78 0.21 11.23 算法2 6.35 62.47 56.49 4.59 0.48 13.65 算法3 7.02 60.70 62.02 4.13 0.48 13.85 本文算法 7.15 51.69 60.09 4.00 0.49 14.19
下载: 导出CSV
-
[1] 吴建雷. 矿井下图像增强与目标跟踪研究[D]. 太原:太原理工大学,2021. WU Jianlei. Research on image enhancement and target tracking in underground mine[D]. Taiyuan:Taiyuan University of Technology,2021.
[2] 刘晓阳,乔通,乔智. 基于双边滤波和Retinex算法的矿井图像增强方法[J]. 工矿自动化,2017,43(2):49-54. DOI: 10.13272/j.issn.1671-251x.2017.02.011 LIU Xiaoyang,QIAO Tong,QIAO Zhi. Image enhancement method of mine based on bilateral filtering and Retinex algorithm[J]. Industry and Mine Automation,2017,43(2):49-54. DOI: 10.13272/j.issn.1671-251x.2017.02.011
[3] 唐守锋,史可,仝光明,等. 一种矿井低照度图像增强算法[J]. 工矿自动化,2021,47(10):32-36. DOI: 10.13272/j.issn.1671-251x.2021060052 TANG Shoufeng,SHI Ke,TONG Guangming,et al. A mine low illumination image enhancement algorithm[J]. Industry and Mine Automation,2021,47(10):32-36. DOI: 10.13272/j.issn.1671-251x.2021060052
[4] 阮顺领,刘丹洋,白宝军,等. 基于自适应MSRCP算法的煤矿井下图像增强方法[J]. 矿业研究与开发,2021,41(11):186-192. DOI: 10.13827/j.cnki.kyyk.2021.11.030 RUAN Shunling,LIU Danyang,BAI Baojun,et al. Image enhancement method for underground coal mine based on the adaptive MSRCP algorithm[J]. Mining Research and Development,2021,41(11):186-192. DOI: 10.13827/j.cnki.kyyk.2021.11.030
[5] 许新宇. 光照不均图像的超分辨率重建与空间融合增强算法研究[D]. 西安:西安科技大学,2020. XU Xinyu. Research on super-resolution reconstruction and spatial fusion enhancement algorithm of uneven light image[D]. Xi'an:Xi'an University of Science and Technology,2020.
[6] 乔佳伟,贾运红. Retinex算法在煤矿井下图像增强的应用研究[J]. 煤炭技术,2022,41(3):193-195. QIAO Jiawei,JIA Yunhong. Research on application of Retinex algorithm in image enhancement in coal mine[J]. Coal Technology,2022,41(3):193-195.
[7] 李星. 低照度彩色图像CLAHE增强算法研究[D]. 哈尔滨:哈尔滨理工大学,2021. LI Xing. Research on CLAHE enhancement algorithm for low illuminance color image[D]. Harbin:Harbin University of Science and Technology,2021.
[8] SAAD N H,ISA N A M,SALEH H M. Nonlinear exposure intensity based modification histogram equalization for non-uniform illumination image enhancement[J]. IEEE Access,2021,9:93033-93061. DOI: 10.1109/ACCESS.2021.3092643
[9] THEPADE S D,PARDHI P M. Contrast enhancement with brightness preservation of low light images using a blending of CLAHE and BPDHE histogram equalization methods[J]. International Journal of Information Technology,2022,14(6):3047-3056. DOI: 10.1007/s41870-022-01054-0
[10] 管萍. 基于Retinex和卷积神经网络的低照度图像增强方法研究[D]. 芜湖:安徽工程大学,2022. GUAN Ping. Research on low illumination image enhancement method based on Retinex and convolutional neural network[D]. Wuhu:Anhui Polytechnic University,2022.
[11] 吴佳丽. 基于Retinex理论的非均匀光照图像增强算法研究[D]. 南京:南京邮电大学,2022. WU Jiali. Research on image enhancement algorithms under non-uniform illumination conditions based on Retinex theory[D]. Nanjing:Nanjing University of Posts and Telecommunications,2022.
[12] 赵征鹏,李俊钢,普园媛. 基于卷积神经网络的Retinex低照度图像增强[J]. 计算机科学,2022,49(6):199-209. DOI: 10.11896/jsjkx.210400092 ZHAO Zhengpeng,LI Jungang,PU Yuanyuan. Low-light image enhancement based on retinex theory by convolutional neural network[J]. Computer Science,2022,49(6):199-209. DOI: 10.11896/jsjkx.210400092
[13] 武亚红. 不均匀低照度低质图像增强算法研究[D]. 南京:南京邮电大学,2021. WU Yahong. Study of algorithms for non-uniform low-light low-quality image enhancement[D]. Nanjing:Nanjing University of Posts and Telecommunications,2021.
[14] 姜雪松. 不良照明条件下的夜晚图像增强方法研究[D]. 哈尔滨:哈尔滨工业大学,2020. JIANG Xuesong. Research on nighttime image under poor lighting conditions enhancement methods[D]. Harbin:Harbin Institute of Technology,2020.
[15] WEI Chen,WANG Wenjing,YANG Wenhan,et al. Deep Retinex decomposition for low-light enhancement[J]. 2018. DOI: 10.48550/arXiv.1808.04560.
[16] WU Zifeng,SHEN Chunhua,ANTON V D H. Wider or deeper:revisiting the resnet model for visual recognition[J]. Pattern Recognition:The Journal of the Pattern Recognition Society,2019,90:119-133. DOI: 10.1016/j.patcog.2019.01.006
[17] WOO H,PARK J,LEE J,et al. CBAM:convolutional block attention module[C]. European Conference on Computer Vision,Munich,2018:3-19.
[18] LYU Feifan,LU Feng,WU Jianhua,et al. MBLLEN:low-light image/video enhancement using CNNs[C]. British Machine Vision Conference,Newcastle,2018,220(1):4.
[19] LIU Risheng,MA Long,ZHANG Jia'ao,et al. Retinex-inspired unrolling with cooperative prior architecture search for low-light image enhancement[C]. IEEE/CVF Conference on Computer Vision and Pattern Recognition,Kuala Lumpur,2021:10561-10570.
[20] GUO Chunle,LI Chongyi,GUO Jichang,et al. Zero-reference deep curve estimation for low-light image enhancement[C]. IEEE/CVF Conference on Computer Vision and Pattern Recognition,2020:1780-1789.
[21] LI Chongyi,GUO Chunle,LOY C C. Learning to enhance low-light image via zero-reference deep curve estimation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2021,44(8):4225-4238.
[22] ZHANG Yonghua,GUO Xiaojie,MA Jiayi,et al. Beyond brightening low-light images[J]. International Journal of Computer Vision,2021,129:1013-1037. DOI: 10.1007/s11263-020-01407-x
[23] MITTAL A,SOUNDARARAJAN R,BOVIK A C. Making a "completely blind" image quality analyzer[J]. IEEE Signal Processing Letters,2012,20(3):209-212.
[24] SETIADI D R I M. PSNR vs SSIM:imperceptibility quality assessment for image steganography[J]. Multimedia Tools and Applications,2021,80(6):8423-8444. DOI: 10.1007/s11042-020-10035-z
-
期刊类型引用(4)
1. 王轶玮,李晓宇,翁智,白凤山. 基于改进Zero-DCE模型的矿井低照度图像增强方法. 工矿自动化. 2025(02): 57-64+99 .  本站查看
本站查看
2. 王泰基. 基于ITLBO-AFSA优化FCM算法的矿井图像增强. 工矿自动化. 2024(S1): 25-28 . 本站查看
3. 王启飞,赵逸涵,刘帅,刘昊霖,孙英峰,李成武. 煤矿事故大数据驱动的风险治理模式研究综述. 中国安全科学学报. 2024(07): 28-37 . 百度学术
4. 樊丹丹. 虚拟现实技术下激光三维无障碍空间图像增强算法. 激光杂志. 2024(10): 125-129 . 百度学术
其他类型引用(3)


计量
- 文章访问数: 194
- HTML全文浏览量: 103
- PDF下载量: 55
- 被引次数: 7
