
A three machine digital twin and collaborative modeling method for fully mechanized working face
-
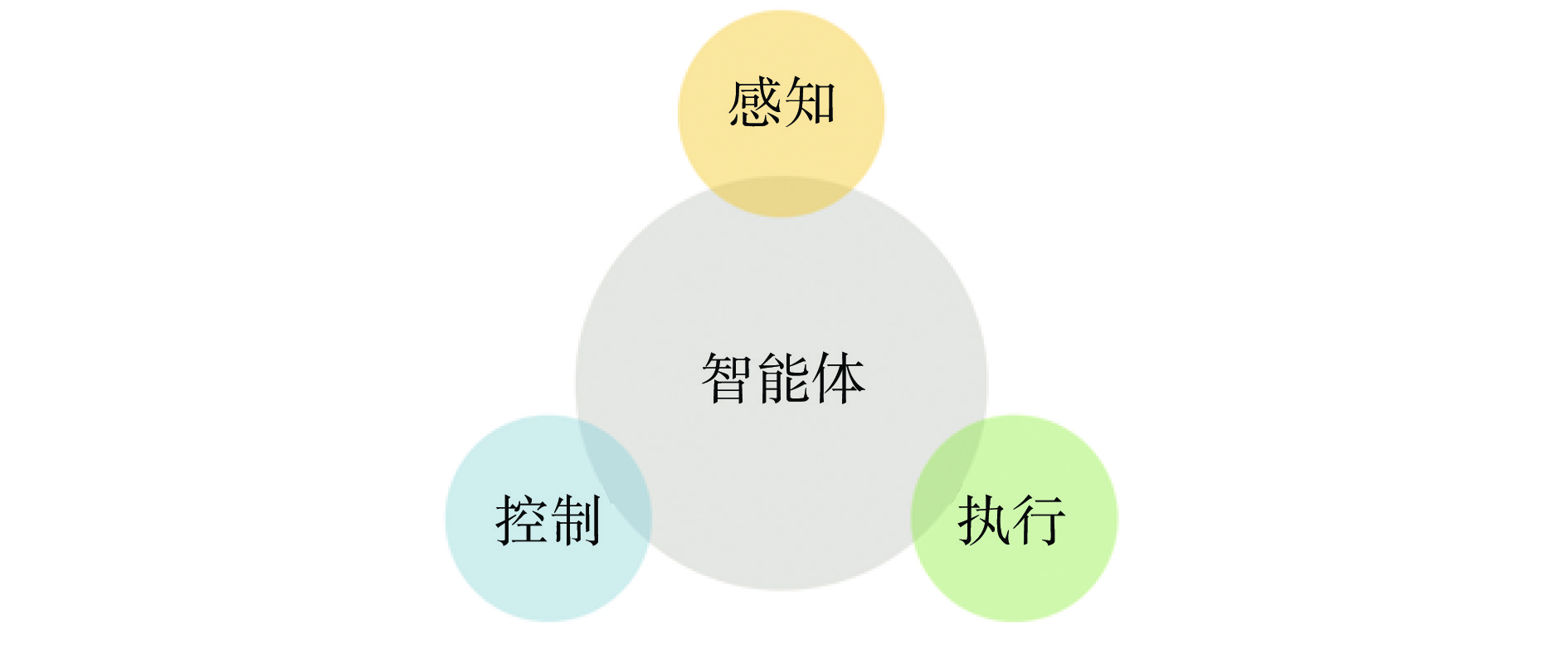
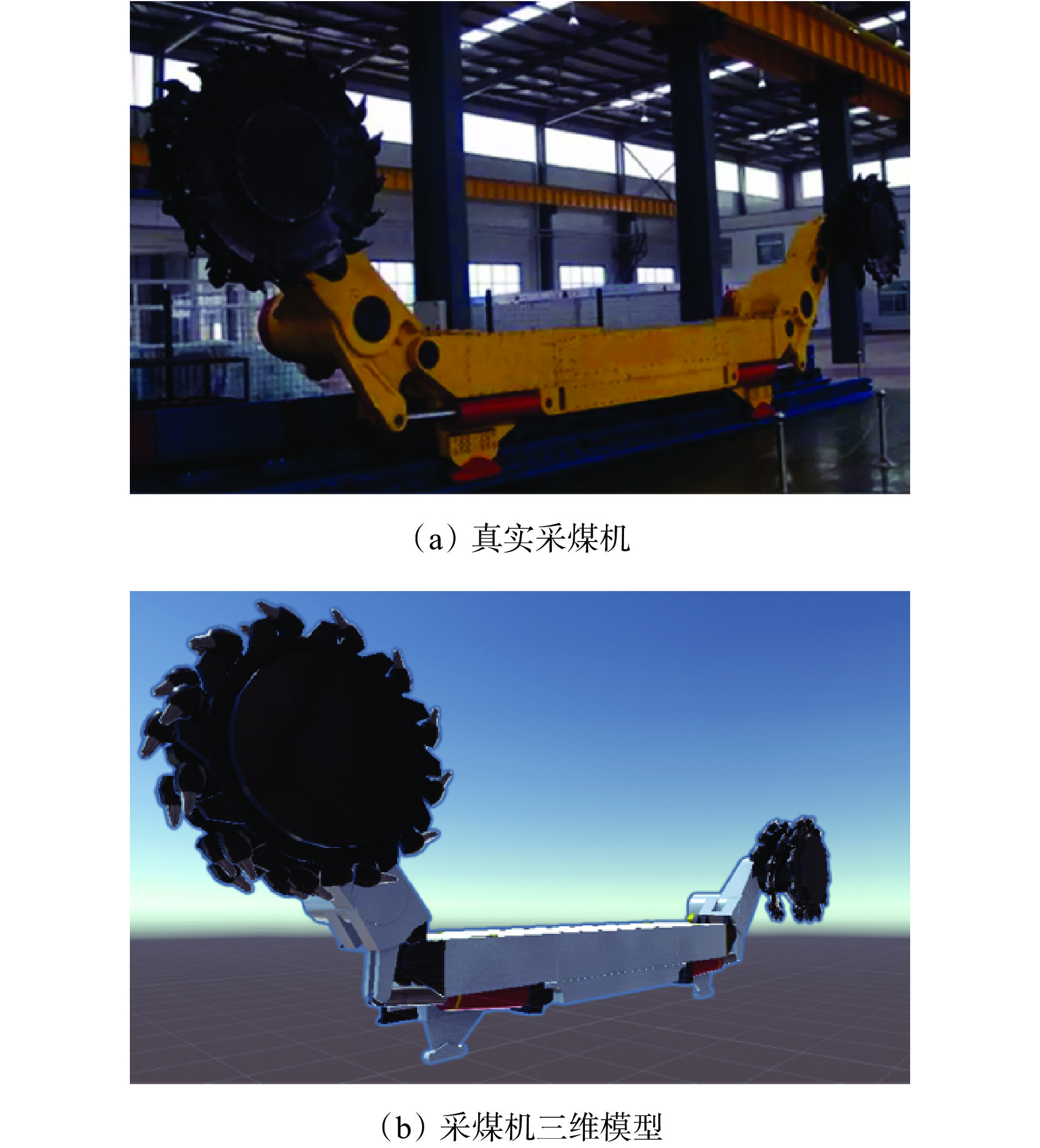
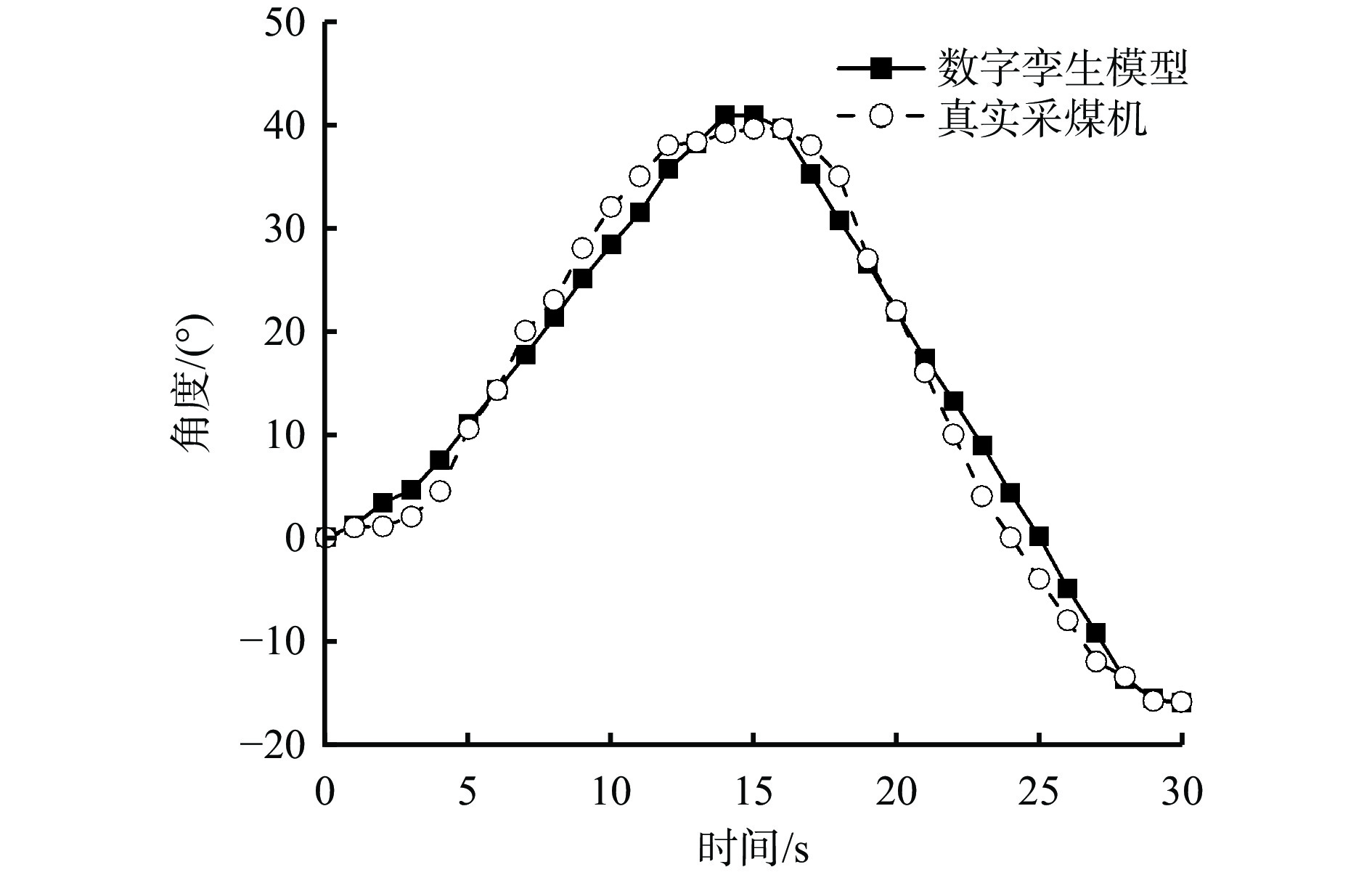
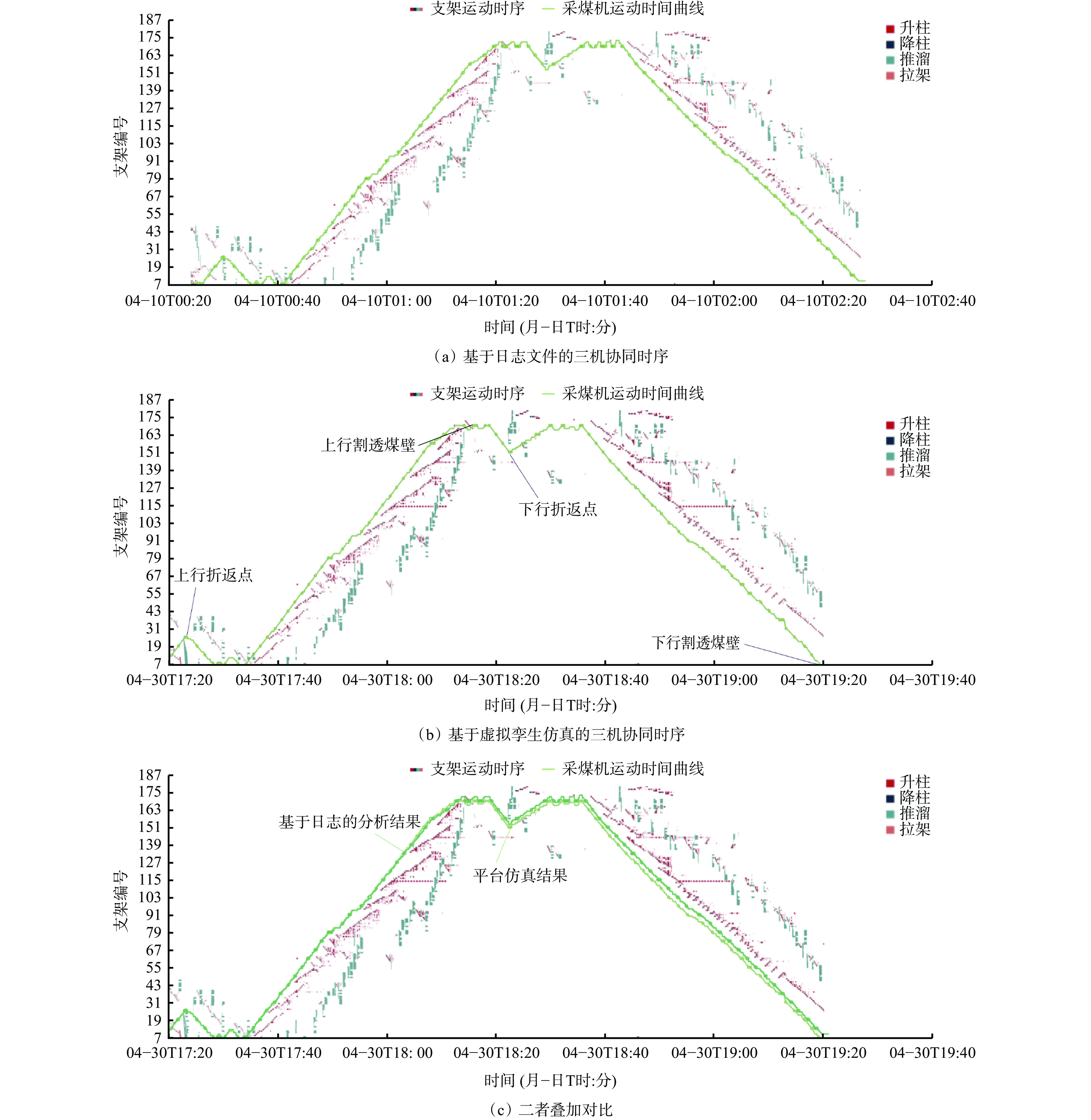
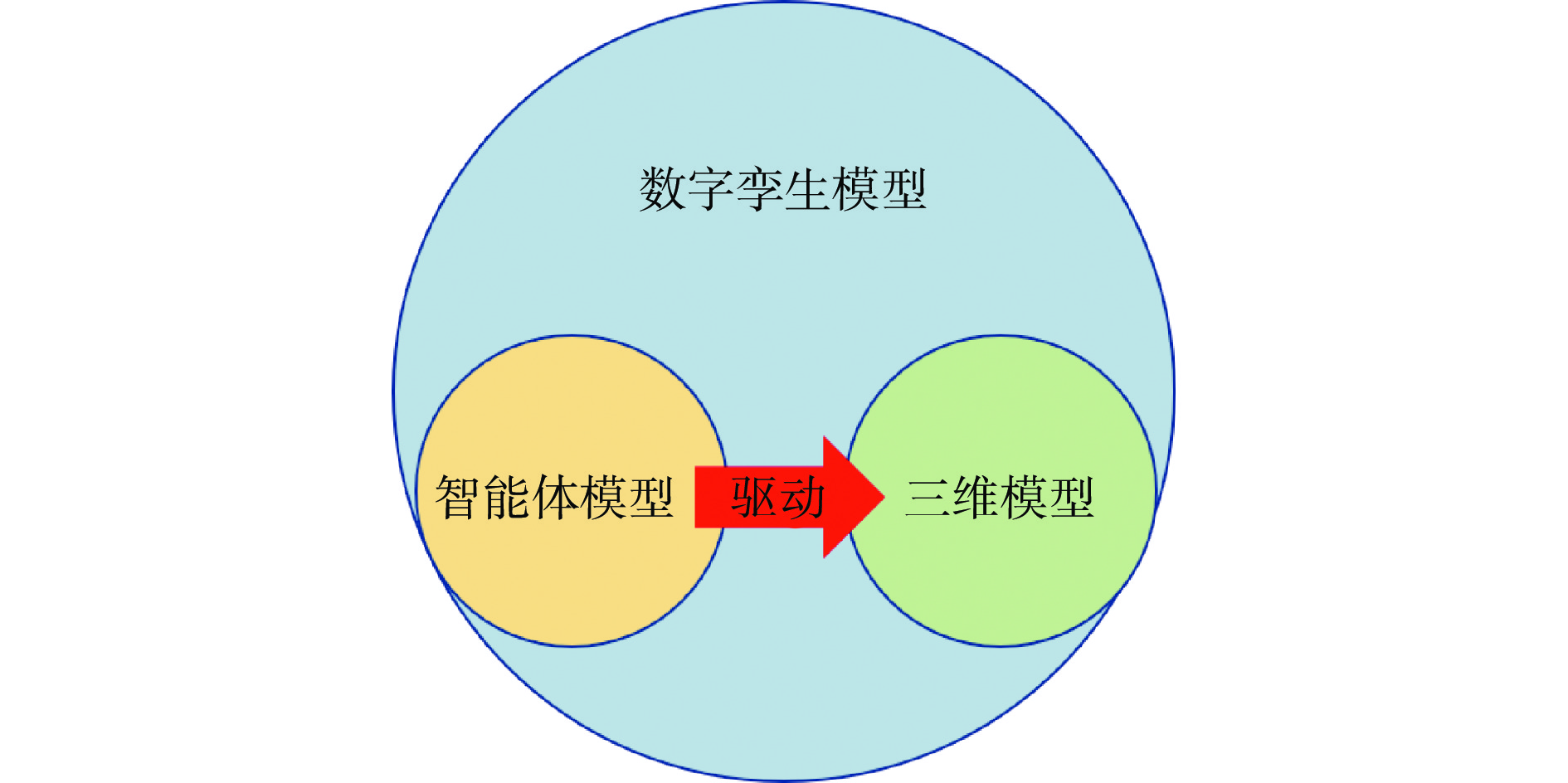
摘要: 针对现有煤矿设备数字孪生建模方法主要侧重对单一设备进行建模,缺少三机耦合协同关系分析的问题,提出了综采工作面三机数字孪生及协同建模方法。采用智能体建模方法构建包含感知单元、控制单元和执行单元的采煤机、液压支架、刮板输送机智能体模型,依据三维建模流程构建对应的可视化模型,以智能体模型驱动三维模型运动,二者结合构成三机数字孪生模型;采用离散事件建模方法构建涵盖三机数字孪生模型交互过程的协同工艺模型,按照时序梳理三机开采工艺,形成三机协同工艺时序表。数字孪生模型用于描述综采三机的状态与行为,进行个体层面的仿真计算;协同工艺模型用于表征数字孪生模型之间的时序动作转换,实现对三机协同过程整体的推演。采煤机数字孪生模型的摇臂升降仿真实验结果表明,与真实设备测量数据对比,模型误差小,摇臂倾角平均误差为2.3°;液压支架数字孪生模型的连续升柱动作仿真实验结果表明,模型与真实设备的一致性好,与真实设备测量数据对比,角度平均误差为0.14°,行程平均误差为6.3 mm;结合煤矿实际生产日志对构建的三机协同模型进行虚实仿真实验,结果表明,所构建的综采工作面三机数字孪生模型与真实设备实现了相互映射,仿真结果与真实记录接近,三机协同模型可以较为准确地反映协同开采过程。综采工作面三机数字孪生及协同建模方法为综采设备及其协同关系的数字孪生建模提供了新思路。Abstract: The existing coal mine equipment digital twin modeling method mainly focuses on single equipment modeling. It lacks three machine coupling collaborative relationship analysis. In order to solve the above problems, the paper puts forward three machine digital twin and collaborative modeling method for fully mechanized working face. By adopting an intelligent modeling method, the method constructs agent-based models of a coal mining machine, a hydraulic support and a scraper conveyor which comprise a sensing unit, a control unit and an execution unit. The method constructs corresponding visual models according to a three-dimensional modeling process. The method drives the three-dimensional models to move by the intelligent models. The combination of the two forms a digital twin model of three machines. A discrete event modeling method is used to construct a collaborative process model covering the interaction process of the three machine digital twin model. The three machine mining process is sorted out according to the time sequence to form a three machine collaborative process time sequence table. The digital twin model is used to describe the state and behavior of the three machines in fully mechanized mining and to simulate the calculation at the individual level. The collaborative process model is used to represent the sequential action transformation between digital twin models and realize the deduction of the whole three machine collaborative process. The simulation of rocker lifting and lowering for the digital twin model of the shearer is carried out. The simulation results show that compared with the measured data of real equipment, the model error is small, an average error of rocker arm dip angle is 2.3°. The simulation of continuous column lifting action for the digital twin model of hydraulic support is carried out. The simulation results show good consistency between the model and real equipment. Compared with the measured data of the real equipment, the average angle error is 0.14° and the average stroke error is 6.3 mm. Combined with the actual production log of the coal mine, the virtual and real simulation experiment of the three machine collaborative model is carried out. The results show that the three machine digital twin model of the fully mechanized working face and real equipment realize mutual mapping. The simulation results are close to the real records. The three machine collaborative model can accurately reflect the collaborative mining process. The method of three machine digital twin and collaborative modeling for fully mechanized working face provides a new idea for the digital twin modeling of fully mechanized coal mining equipment and its collaborative relationship.
-
0. 引言
随着我国中东部煤炭资源的枯竭,煤炭发展中心逐渐向西部转移[1]。西部矿区煤炭资源丰富,煤层厚度大、层位多,西部矿区煤炭资源开采过程中,常常遇到多煤层开采的情况[2-4]。
下行开采和上行开采在多煤层开采中占有很大比重。不同的煤层群接续开采方案造成煤岩体应力变化规律与围岩变形情况存在很大差别。目前,围绕煤层下行开采与上行开采,相关学者开展了大量工作。洛锋等[5]研究了下行开采过程中煤层底板裂隙的发育规律与岩体的应力−应变关系,得出煤层底板应力重新分布受到采空区压实区和膨胀区的影响。马振乾等[6]借助物理相似模拟与数值模拟方法,研究了多煤层重复采动条件下煤层底板应力和塑性区发育规律。马立强等[7-8]研究发现当煤层采用上行开采时,下部煤层的开采会改变上部岩层破坏状态与上部煤层矿压分布规律。韩军等[9]采用多元回归分析法,得到上部煤层破环程度与煤层开采参数和采矿地质条件之间的关系。李杨等[10]通过分析采动影响系数对上行开采煤层破坏的影响规律,并采用间深比判别法,得到上行开采可行度的定量判别指标。王寅等[11]通过理论分析和相似模拟,研究上行开采重复采动下顶板结构形态,得到煤层顶板“上行式开采三铰拱”结构的稳定与失稳条件。但以上研究并未结合矿井的经济状况来优选煤层群接续开采方案。
本文以库车县榆树岭煤矿有限责任公司(以下简称榆树岭矿)为研究背景,通过数值模拟分析上下行开采方案下接续煤层完整性、工作面应力变化规律,并结合矿井经济效益优选榆树岭矿煤层群接续开采方案;利用层次分析法(Analytic Hierarchy Process,AHP)和模糊数学理论[12-13]对优选结果进行验证。
1. 矿井概况
1.1 地质条件
榆树岭矿井田区域内可采煤层共4层,自上而下分别为下5、下7、下8与下10煤层,煤层平均倾角为10°,各煤层平均厚度分别为9.20,3.00,0.98,6.88 m。地面标高为1 793~1 834 m,下5煤层标高为1 653~1 688 m,平均埋深约为105 m,煤层平均密度为1.29 t/m3,上覆岩层平均密度为2.48 t/m3,下5与下7、下8、下10煤层间距分别为34,48,94 m。煤岩层地质柱状图如图1所示。
1.2 开采现状及接续问题
目前矿井主采煤层为下5煤层,下5煤层布置110501工作面和110503工作面。与下5煤层相邻的下7、下8煤层厚度与下5煤层相差较大,在当前没有准备配采工作面的情况下−若采用下行开采,直接接续下7、下8煤层难以保障矿井产量;若优先接续较厚的下10煤层,形成上行开采,能有效解决下行开采难以保障矿井生产能力和经济效益的问题,但上行开采的安全性未知,尤其是上行开采影响上部煤层结构完整性和工作面应力变化规律不清楚。因此,亟需对煤层群接续开采方案进行优选研究。
2. 不同开采方案下煤层完整性及应力变化规律
2.1 数值模型
根据榆树岭矿岩层地质柱状图,结合实验室岩石力学参数测试结果,并考虑矿井目前开采状况,建立220 m×240 m×153 m(长×宽×高)的数值模型,如图2所示。模型建至下5煤层上部厚度约为20 m的基本顶处,基本顶上部至地表85 m的岩层由模型顶部施加的2.11 MPa地应力代替。模型四周固定水平位移,底面固定垂直位移,整体施加重力加速度9.8 m/s2。模型中工作面倾斜长度为160 m,推进距离为120 m。为减小模型边界效应影响,模型中工作面倾向方向左右两侧各留设40 m边界,工作面推进方向前后两侧各留设50 m边界。模型煤岩层参数见表1。
表 1 模型煤岩层参数Table 1. Coal strata parameters of model序号 岩性 厚度/m 密度/(kg·m−3) 体积模量/MPa 剪切模量/MPa 抗拉强度/MPa 黏聚力/MPa 内摩擦角/(°) 1 细砂岩 17.07 2 630 2 643 1 820 1.46 3.80 40.23 2 粉砂岩 2.32 2 660 3 550 2 345 1.38 2.98 39.60 3 下10煤 6.88 1 350 2 139 1 204 0.78 1.52 48.23 4 粗砂岩 4.40 2 490 2 679 1 764 1.49 0.42 43.15 5 砂砾岩 13.20 2 540 2 886 1 901 1.72 0.44 39.60 6 粉砂岩 5.40 2 660 3 550 2 345 1.38 2.98 39.60 7 砂砾岩 13.00 2 540 2 886 1 901 1.72 0.44 39.60 8 中砂岩 4.80 1 460 3 800 1 820 1.53 3.80 40.00 9 粉砂岩 4.00 2 660 3 550 2 345 1.38 2.98 39.60 10 下8煤 0.98 1 350 2 139 1 204 0.78 1.52 48.23 11 细砂岩 11.40 2 630 2 643 1 820 1.46 3.80 40.23 12 粉砂岩 4.00 2 660 3 550 2 345 1.38 2.98 39.60 13 下7煤 2.95 1 350 2 139 1 204 0.78 1.52 48.23 14 粉砂岩 4.00 2 660 3 550 2 345 1.38 2.98 39.60 15 中砂岩 17.70 1 460 3 800 1 820 1.53 3.80 40.00 16 砂砾岩 3.60 2 540 2 886 1 901 1.72 0.44 39.60 17 细砂岩 8.00 2 630 2 643 1 820 1.46 3.80 40.23 18 下5煤 9.20 1 350 2 139 1 204 0.78 1.52 48.23 19 粉砂岩 5.60 2 660 3 550 2 345 1.38 2.98 39.60 20 粉砂岩 14.50 2 660 3 550 2 345 1.38 2.98 39.60 采用FLAC3D数值软件模拟下行开采和上行开采时,下7、下8煤层完整性和工作面应力变化规律。数值模拟方案:① 下行开采。开挖下5煤层,运行模型至岩层稳定,再依次开挖下7、下8煤层。② 上行开采。开挖下5煤层,运行模型至岩层稳定后,开挖下10煤层,再次运行模型至岩层稳定,最后依次开挖下7、下8煤层。
2.2 煤层完整性
针对煤层回采造成的煤层及各层煤间岩层完整性破坏规律,结合数值模拟结果,采用以下2种方法进行评价:① 煤岩层塑性区发育情况。通过各煤岩层塑性区破坏形式和煤层上方塑性区发育高度来表征煤层完整性。② 工作面未破坏区占比。通过工作面倾斜方向上未发生塑性破坏的模块数与工作面倾斜方向上总模块数之比来表征煤层完整性。
以往研究表明,下行开采对煤层完整性的影响较小[14-15],因此本文着重分析上行开采对下7、下8煤层完整性的影响。
下7、下8煤层塑性区分布分别如图3、图4所示。下7、下8煤层完整性表征参数见表2。
(1) 下7煤层完整性。由图3可知,下10煤层开采稳定后,下7煤层主要以剪切破坏为主,破坏区域主要集中在工作面边缘以内80~85 m的圆环区域。工作面推进距离为30,60,90 m时,下10煤层上覆岩层塑性区发育平均高度为44.60 m,已知下10煤层与下8、下7煤层的间距分别为44.60,60.98 m,因此塑性区破坏导通至下8煤层,但并未发育至下7煤层。由表2可知,当下7煤层工作面运输巷、回风巷与下10煤层工作面运输巷、回风巷平行布置时,下7煤层工作面倾向未破坏区占比平均值为56.4%,煤层破坏严重;当下7煤层工作面运输巷、回风巷与下10煤层工作面运输巷、回风巷内错5 m布置时,工作面未破坏区占比平均值为68.4%,煤层完整性有所改善,但煤层破坏仍较严重;当下7煤层工作面运输巷、回风巷与下10煤层工作面运输巷、回风巷内错10 m布置时,工作面未破坏区占比平均值为87.5%,煤层塑性区破坏范围有效降低,煤层完整性满足工作面回采要求。
表 2 下7、下8煤层完整性表征参数Table 2. Integrity characterization parameters of lower No.7 and No.8 coal seams工作面推进
距离/m塑性区发育高度/m 未破坏区占比/% 本煤层工作面运输巷、
回风巷与下10煤层工作面
运输巷、回风巷平行布置本煤层工作面运输巷、
回风巷与下10煤层工作面
运输巷、回风巷内错5 m布置本煤层工作面运输巷、
回风巷与下10煤层工作面
运输巷、回风巷内错10 m布置下7煤层 下8煤层 下7煤层 下8煤层 下7煤层 下8煤层 下7煤层 下8煤层 30 46.32 未导通上部
下7煤层采空区47.90 40.60 60.40 53.10 87.20 59.40 60 46.21 73.40 45.30 84.40 87.20 89.60 61.70 90 41.23 47.90 41.40 60.40 57.80 85.60 60.20 (2) 下8煤层完整性。由图4可知,下7煤层回采稳定后,下8煤层主要以剪切破坏与剪−拉破坏为主,破坏范围主要集中工作面推进方向两侧。对比图3与图4中下8煤层塑性区破坏范围可知,下7煤层回采并未使下8煤层塑性区进一步发育。由表2可知,当下8煤层工作面运输巷、回风巷与下10煤层工作面运输巷、回风巷内错10 m布置时,下8煤层工作面倾向未破坏区占比平均值为60.4%,煤层完整性得到一定改善,满足工作面安全回采要求。
2.3 工作面应力变化规律
2.3.1 工作面应力分布
下行开采和上行开采时,下7、下8煤层工作面应力分布分别如图5、图6所示。
由图5(a)可知,下7煤层工作面中部出现应力集中区,原因是下7煤层工作面中部位于下5煤层工作面充分采动区下部,下5煤层顶板垮落后采空区中部矸石压实效果比四周更充分,应力在中部聚集并传递到下7煤层。由图5(b)可知,下10煤层工作面回采同样导致下7煤层工作面中部出现应力集中现象。对比图5(a)和图5(b)可知,上行开采时,下7煤层工作面中部平均应力为1.45 MPa,相较于下行开采时平均应力(2.65 MPa)降低了45.3%。由此可见,上行开采可使上部煤层应力得到充分释放,为上部煤层开采提供了充分的安全条件。
对比图6(a)和图6(b)可知,上行开采时,下8煤层工作面平均应力为1.23 MPa,相较于下行开采时工作面平均应力(1.89 MPa)降低了34.9%,表明上行开采对下8煤层具有一定的卸压作用。
2.3.2 工作面支承应力分布
下行开采和上行开采时,下7煤层工作面不同推进距离下支承应力分布如图7所示。
![]() 图 7 下7煤层工作面不同推进距离下支承应力分布Figure 7. Supporting stress distribution under different advancing distance of lower No.7 coal seam working face
图 7 下7煤层工作面不同推进距离下支承应力分布Figure 7. Supporting stress distribution under different advancing distance of lower No.7 coal seam working face由图7(a)可知,当下7煤层工作面推进20,40,60 m时,工作面前方支承应力峰值分别为6.39,7.06,7.58 MPa,受下5煤层和本煤层回采双重影响,支承应力总体变化趋势为先逐渐增大后逐渐减小;当工作面推进80,100,120 m时,工作面前方支承应力峰值分别为7.13,7.43,8.02 MPa,在采空区范围内支承应力先增大后减小,在工作面前方支承应力先增大再减小并趋于稳定。
由图7(b)可知,当工作面推进20 m时,工作面前方支承应力峰值为3.64 MPa;当工作面推进40,60,80 m时,工作面前方支承应力峰值分别为2.35,2.74,3.51 MPa,从开切眼至终采线范围内支承应力变化可分为采空区低应力稳定区、采空区应力升高区、工作面应力降低区、工作面实体煤侧应力升高区和终采线侧应力降低区;当工作面推进100,120 m时,工作面前方支承应力峰值分别为3.53,5.91 MPa,由于采空区垮落的矸石被压实,应力可有效传递,采空区出现应力升高现象。
对比图7(a)和图7(b)可知,相较于下行开采,上行开采下工作面推进20,40,60,80,100,120 m时,工作面前方支承应力峰值分别减少了43.0%,66.7%,63.9%,50.8%,52.5%,26.3%,表明采用上行开采可有效改善上部煤层应力环境。
下行开采和上行开采时,下8煤层工作面不同推进距离下支承应力分布如图8所示。
![]() 图 8 下8煤层工作面不同推进距离下支承应力分布Figure 8. Supporting stress distribution under different advancing distance of lower No.8 coal seam working face
图 8 下8煤层工作面不同推进距离下支承应力分布Figure 8. Supporting stress distribution under different advancing distance of lower No.8 coal seam working face由图8(a)可知,当下8煤层工作面推进20,40,60,80 m时,工作面前方支承应力峰值分别为3.51,4.54,5.45,4.95 MPa,受本煤层和下7煤层工作面回采应力影响,工作面前方支承应力先升高后逐渐降低,并在终采线附近降到最小;当工作面推进100,120 m时,工作面前方支承应力峰值分别为5.60,7.64 MPa。
由图8(b)可知,当工作面推进20,40 m时,工作面前方支承应力峰值分别为2.82,3.53 MPa,支承应力呈先增大后减小再增大的趋势;当工作面推进60,80,100,120 m时,工作面前方支承应力峰值分别为3.81,4.50,3.85,4.86 MPa,从开切眼至终采线范围内支承应力变化可分为采空区低应力稳定区、工作面实体煤侧应力升高区、终采线侧应力降低区。
对比图8(a)和图8(b)可知,相较于下行开采,上行开采下工作面推进20,40,60,80,100,120 m时,工作面前方支承应力峰值分别减少了19.7%,22.2%,30.9%,9.1%,31.3%,36.4%,煤层工作面应力环境得到改善。
3. 煤层群接续开采方案优选
3.1 经济效益
参考矿井已采煤层开采经验,确定下7煤层和下10煤层工作面日循环割煤4刀,日循环进尺为3.2 m。日产量计算公式为
$$ N = L S h r c $$ (1) 式中:N为工作面日产量,t;L为工作面长度,m;S为工作面日推进长度,m;h为工作面采高,m;
$ r $ 为煤层密度,t/m3;c为工作面采出率,厚煤层不低于0.93,中厚煤层不低于0.95,薄煤层不低于0.97。将下7煤层和下10煤层参数代入式(1),可得下7煤层工作面日产量为1 388.2 t,下10煤层工作面日产量为3 961.9 t。下7、下10煤层年产量分别为41.65,118.86万t。按照2020年4月—2021年3月平均吨煤售价428.69元计算,采用下行开采和上行开采的年收入分别为1.79亿元和5.10亿元,采用上行开采比下行开采每年经济效益提高64.9%。
3.2 方案优选
不同煤层群接续开采方案相关指标对比见表3。可看出上下行开采方案下煤层完整性均可满足煤层回采要求,但采用上行开采方案时,一方面可有效释放接续煤层应力,另一方面又提升了矿井经济效益,因此优选上行开采作为榆树岭矿煤层群接续开采方案。
表 3 煤层群接续开采方案相关指标对比Table 3. Correlation index comparison of coal seam group continuous mining schemes接续开采方案 煤层完整性 工作面平均应力/MPa 工作面最大支承应力/MPa 经济效益 下7煤层 下8煤层 下7煤层 下8煤层 下7煤层 下8煤层 年产量/万t 年收入/亿元 下行开采 完整性较好 完整性较好 2.65 1.89 8.02 7.64 41.65 1.79 上行开采 未破坏区占比87.5% 未破坏区占比60.4% 1.45 1.23 5.91 4.86 118.86 5.10 注:煤层完整性、工作面平均应力、工作面最大支承应力属于煤层群接续开采方案优选的必要性指标;经济效益属于煤层群接续开采方案优选的充分性指标。 4. 煤层群接续开采方案优选结果验证
采用AHP与模糊数学理论对煤层群接续开采方案优选结果进行验证。
4.1 评价指标权重向量
选取采煤直接成本X1、工作面生产能力X2、采煤方法X3、回采工效X4、工人熟悉程度X5、实施难易程度X6、煤层应力环境X7、煤层完整性程度X8这8个影响因素作为评价指标,建立煤层群接续开采方案综合评价指标模型,如图9所示。
![]() 图 9 煤层群接续开采方案综合评价指标模型Figure 9. Comprehensive evaluation index model of coal seam group continuous mining scheme
图 9 煤层群接续开采方案综合评价指标模型Figure 9. Comprehensive evaluation index model of coal seam group continuous mining scheme通过二元比较法[16],构造准则层相对于目标层的判断矩阵
$ {{\boldsymbol{D}}_1}{\text{ = }}\left[ {\begin{array}{*{20}{c}} 1&6&{{1 \mathord{\left/ {\vphantom {1 2}} \right. } 2}} \\ {{1 \mathord{\left/ {\vphantom {1 6}} \right. } 6}}&1&{{1 \mathord{\left/ {\vphantom {1 5}} \right. } 5}} \\ 2&5&1 \end{array}} \right] $ ,利用方根法计算得到判断矩阵的最大特征值$ {\lambda _{\max }}{\text{ = }}3.086 $ ,特征向量$ {{\boldsymbol{M}}_1} = ( {\begin{array}{*{20}{c}} {0.368}&{0.082}&{0.550} \end{array}} ) $ 。对判断矩阵D1进行一致性检验,其中一致性指标
${I_{\rm{c}}}{\text{ = }}\dfrac{{{\lambda _{\max }} - {{n}}}}{{{{n}} - 1}}{\text{ = }}\dfrac{{3.086 - 3}}{{3 - 1}}{\text{ = }}0.043$ (n为综合评价指标模型层数),平均随机一致性指标$ {I_{\rm{r}}} = 0.58 $ ,一致性比率$ {R_{\rm{c}}} = \dfrac{{I_{\rm{c}}}}{{I_{\rm{r}}}} = 0.074 $ <0.1,因此,判断矩阵D1通过一致性检验,由此可得目标层对准则层的权重向量${{\boldsymbol{W}}_1} = ( {\begin{array}{*{20}{c}} {0.368}&{0.082}&{0.550} \end{array}} )$ 。同理可构造准则层相对于指标层的判断矩阵D2,D3,D4,求得各判断矩阵的特征向量,并进行一致性检验。AHP单排序结果见表4,可知判断矩阵D2,D3,D4同样通过一致性检验。由判断矩阵D1—D4的最大特征值和特征向量,求得评价指标的权重向量$ {\boldsymbol{W}} = (0.045\;\;\;0.238\;\;\; 0.085\;\;\; $ $ 0.056\;\;\;0.008\;\;\;0.018\;\;\;0.138\;\;\;0.413) $ 。表 4 AHP单排序结果Table 4. Single ordering results of AHP判断矩阵 最大特征值 特征向量 一致性比率 D1 3.086 (0.368 0.082 0.550) 0.074 D2 3.004 (0.122 0.648 0.230) 0.003 D3 3.003 (0.682 0.103 0.216) 0.002 D4 3.018 (0.25 0.75) 0 4.2 综合隶属度指标矩阵
采用线性函数法和二元对比排序法构造指标层各因素相对于下行开采和上行开采的隶属度矩阵[17],从而得到综合隶属度指标矩阵
${\boldsymbol{R}} = \left[ {\begin{array}{*{20}{c}} {0.125}&0 \\ {0.359}&1 \\ {0.4}&{0.1} \\ {0.6}&1 \\ {0.4}&{0.1} \\ {0.5}&0 \\ 0&{0.288} \\ 0&{0.875} \end{array}} \right]$ ,R中第1列、第2列元素分别为下行开采、上行开采方案中指标层各因素的隶属度。4.3 最优方案验证
利用评价指标权重向量
$ {\boldsymbol{W}} $ 与综合隶属度指标矩阵R,求得下行开采和上行开采2种煤层群接续开采方案的综合评价向量${\boldsymbol{E}} = {\boldsymbol{W}} {\text{·}} {\boldsymbol{R}} = (0.170\;87\;\;\;\; 0.704\;42)$ ,可知上行开采方案的综合评价权重(0.704 42)大于下行开采方案的综合评价权重(0.170 87),验证了上行开采作为煤层群接续开采最优方案的可行性。5. 结论
(1) 上行开采时煤层完整性受到一定程度的破坏,但通过对下7、下8煤层工作面运输巷、回风巷与下10煤层工作面运输巷、回风巷内错布置,可有效减小煤层塑性区破坏范围,当下7、下8煤层工作面运输巷、回风巷与下10煤层工作面运输巷、回风巷内错10 m布置时,下7、下8煤层工作面未破坏区占比平均值分别为87.5%,60.4%,煤层完整性满足回采要求。与下行开采相比,上行开采时下7、下8煤层工作面平均应力分别降低了45.3%,34.9%,下7、下8煤层工作面回采期间最大支承应力分别降低了66.7%与36.4%。
(2) 采用上行开采在煤层完整性满足安全回采要求和改善煤层应力环境的同时,矿井经济效益提高了64.9%,因此优选上行开采作为煤层群接续开采方案。
(3) 建立了煤层群接续开采方案综合评价指标模型,通过AHP和模糊数学理论对煤层群接续开采方案优选结果进行验证,得到下行开采、上行开采的综合评价权重分别为0.170 87,0.704 42,验证了上行开采作为煤层群接续开采最优方案的可行性。
-
![]()
图 1 数字孪生模型、智能体模型与三维模型的关系
Figure 1. Relation among digital twin model, agent model and 3D model
![]()
图 5 采煤机左侧摇臂倾角数字孪生数据与真实数据对比曲线
Figure 5. Comparison curves between digital twin data and real data of dip angle of shearer left rocker arm
![]()
图 7 真实液压支架与三维模型对比
Figure 7. Comparison of real equipment and 3D model of hydraulic support
![]()
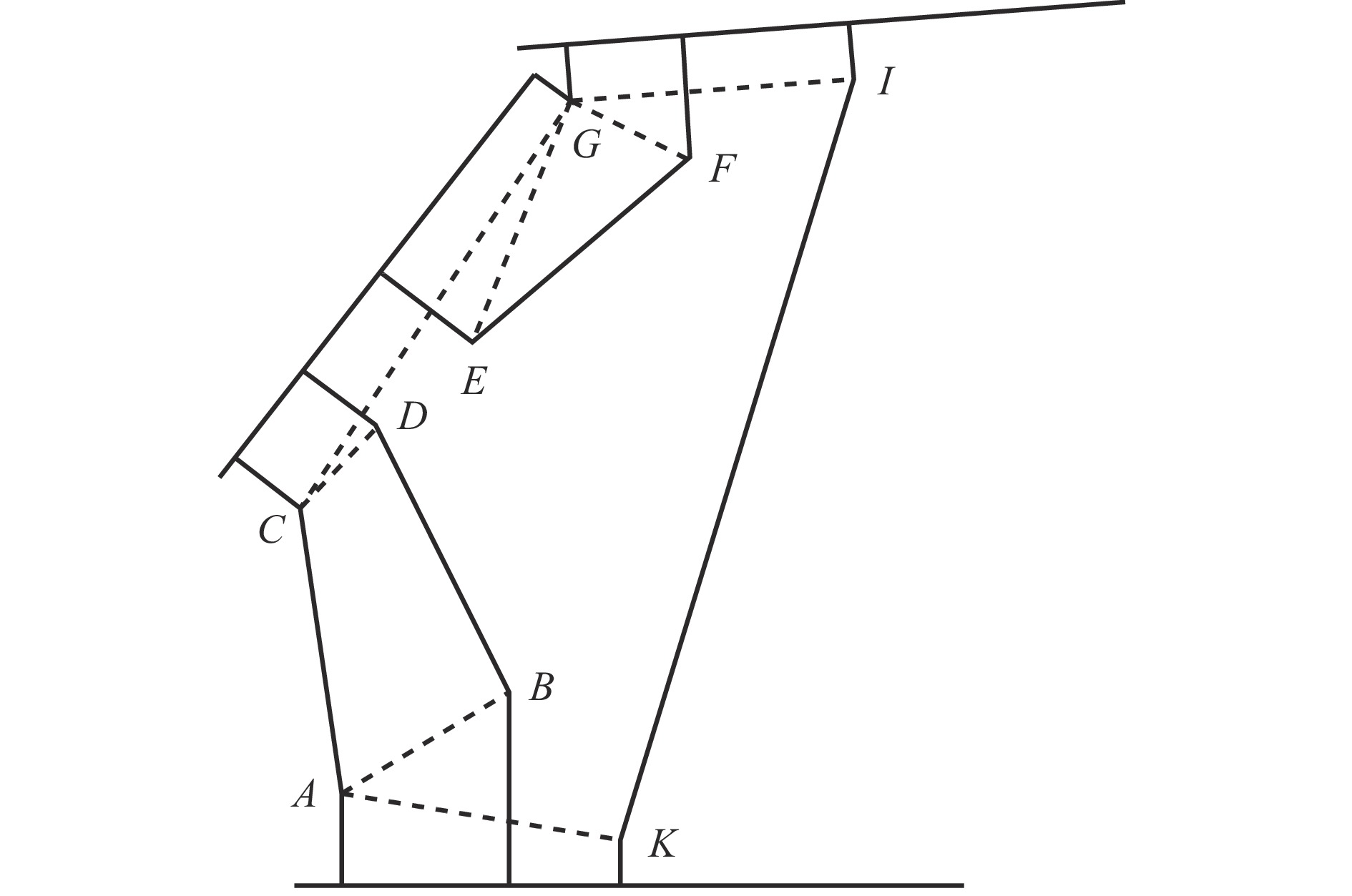
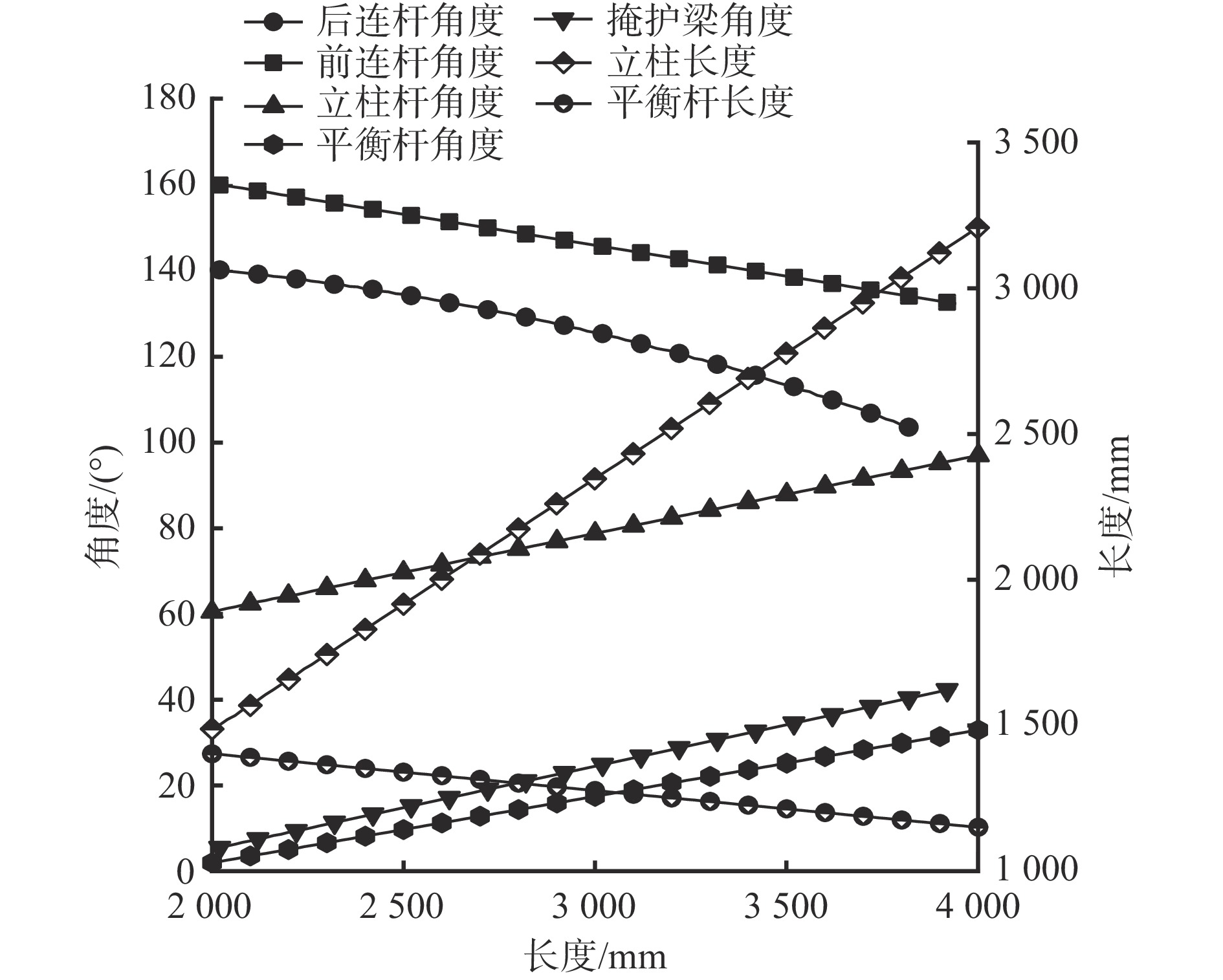
图 8 液压支架姿态各变量连续变化曲线
Figure 8. Continuous change curves of various variables of hydraulic support attitude
![]()
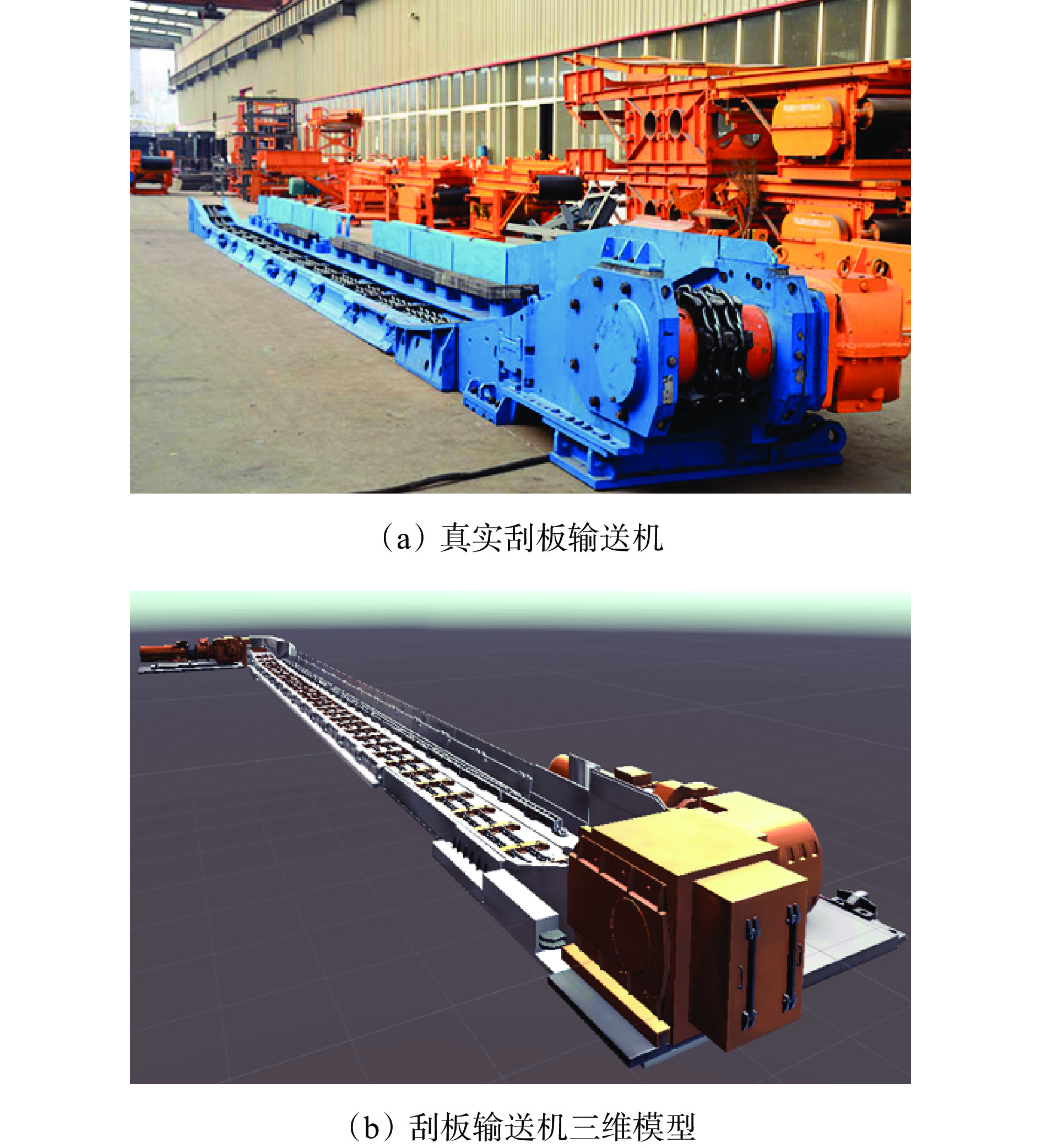
图 9 真实刮板输送机与三维模型对比
Figure 9. Comparison of real equipment and 3D model of scraper conveyor
表 1 采煤机关键感知数据项
Table 1 Key perception data items of shearer
数据类型及传感器 关键感知数据项 结构尺寸 滚筒:直径、截深
摇臂:长度、旋转锚点
机身:长度、宽度、厚度倾角传感器 左右摇臂升降角度 行程传感器 左右滚筒采高卧底 测速传感器 采煤机行进速度 编码器/红外发射器 采煤机位置  下载: 导出CSV
下载: 导出CSV
表 2 液压支架运动仿真结果
Table 2 Hydraulic support motion simulation reaults
项目 后连杆
角度/(°)前连杆
角度/(°)立柱杆
角度/(°)平衡杆
角度/(°)掩护梁
角度/(°)顶梁
角度/(°)立柱
长度/ mm平衡杆
长度/ mm支护
高度/mm初始值 100.00 100.00 80.00 20.00 20.00 0 3000.00 1000.00 3800.00 最终值 107.17 122.89 77.62 32.50 40.85 0 3163.70 1137.40 3800.00 测量值 107.02 123.03 77.51 32.21 40.75 0.05 3158.59 1130.21 3793.39 误差 0.15 0.14 0.11 0.29 0.10 0.05 5.11 7.19 6.61
下载: 导出CSV
表 3 部分三机协同工艺时序表数据
Table 3 Partial three machine collaborative process schedule data
事件名称 动作执行
对象指令持续
时间/s动作
指令采煤机开始
位置/架采煤机结束
位置/架割底煤 采煤机 5 牵启 170 170 3 左降 170 170 4 右牵 170 168 4 加速 168 150 机尾顺序移架 175号支架 3 降柱 165 164 4 移架 164 163 4 升柱 163 162
下载: 导出CSV
-
[1] 张帆,葛世荣,李闯. 智慧矿山数字孪生技术研究综述[J]. 煤炭科学技术,2020,48(7):168-176. DOI: 10.13199/j.cnki.cst.2020.07.017 ZHANG Fan,GE Shirong,LI Chuang. Research summary on digital twin technology for smart mines[J]. Coal Science and Technology,2020,48(7):168-176. DOI: 10.13199/j.cnki.cst.2020.07.017
[2] 王国法,王虹,任怀伟,等. 智慧煤矿2025情景目标和发展路径[J]. 煤炭学报,2018,43(2):295-305. DOI: 10.13225/j.cnki.jccs.2018.0152 WANG Guofa,WANG Hong,REN Huaiwei,et al. 2025 scenarios and development path of intelligent coal mine[J]. Journal of China Coal Society,2018,43(2):295-305. DOI: 10.13225/j.cnki.jccs.2018.0152
[3] 王国法,杜毅博. 智慧煤矿与智能化开采技术的发展方向[J]. 煤炭科学技术,2019,47(1):1-10. WANG Guofa,DU Yibo. Development direction of intelligent coal mine and intelligent mining technology[J]. Coal Science and Technology,2019,47(1):1-10.
[4] 王国法,刘峰,庞义辉,等. 煤矿智能化——煤炭工业高质量发展的核心技术支撑[J]. 煤炭学报,2019,44(2):349-357. WANG Guofa,LIU Feng,PANG Yihui,et al. Coal mine intellectualization:the core technology of high quality development[J]. Journal of China Coal Society,2019,44(2):349-357.
[5] 陶飞,刘蔚然,刘检华,等. 数字孪生及其应用探索[J]. 计算机集成制造系统,2018,24(1):1-18. TAO Fei,LIU Weiran,LIU Jianhua,et al. Digital twin and its potential application exploration[J]. Computer Integrated Manufacturing Systems,2018,24(1):1-18.
[6] 陶飞,刘蔚然,张萌,等. 数字孪生五维模型及十大领域应用[J]. 计算机集成制造系统,2019,25(1):1-18. TAO Fei,LIU Weiran,ZHANG Meng,et al. Five-dimension digital twin model and its ten applications[J]. Computer Integrated Manufacturing Systems,2019,25(1):1-18.
[7] 葛世荣,王世博,管增伦,等. 数字孪生——应对智能化综采工作面技术挑战[J]. 工矿自动化,2022,48(7):1-12. GE Shirong,WANG Shibo,GUAN Zenglun,et al. Digital twin:meeting the technical challenges of intelligent fully mechanized working face[J]. Journal of Mine Automation,2022,48(7):1-12.
[8] 王宏伟,武亚丹,陈龙. 液压支架数字孪生体联合建模方法[J]. 工矿自动化,2022,48(10):13-19. WANG Hongwei,WU Yadan,CHEN Long. Hydraulic support digital twin joint modeling method[J]. Journal of Mine Automation,2022,48(10):13-19.
[9] 孙继平. 煤矿智能化与矿用5G和网络硬切片技术[J]. 工矿自动化,2021,47(8):1-6. SUN Jiping. Coal mine intelligence,mine 5G and network hard slicing technology[J]. Industry and Mine Automation,2021,47(8):1-6.
[10] 谢嘉成. VR环境下综采工作面“三机”监测与动态规划方法研究[D]. 太原: 太原理工大学, 2018. XIE Jiacheng. Method of on monitoring and dynamic planning for "three machines" in a fully mechanized coal mining face under VR environment[D]. Taiyuan: Taiyuan University of Technology, 2018.
[11] 葛世荣,张帆,王世博,等. 数字孪生智采工作面技术架构研究[J]. 煤炭学报,2020,45(6):1925-1936. GE Shirong,ZHNAG Fan,WANG Shibo,et al. Digital twin for smart coal mining work face:technological frame and construction[J]. Journal of China Coal Society,2020,45(6):1925-1936.
[12] 洪飞. 基于数字孪生和数据驱动的新型煤矿智能支护监控系统设计[J]. 煤矿现代化,2021,30(5):116-118,122. DOI: 10.13606/j.cnki.37-1205/td.2021.05.051 HONG Fei. Design of novel coal mine intelligent support monitoring system based on digital twin and data driven[J]. Coal Mine Modernization,2021,30(5):116-118,122. DOI: 10.13606/j.cnki.37-1205/td.2021.05.051
[13] 吴云超,傅琛,张宁馨. 面向数字孪生战场的智能体建模框架构建[J]. 指挥信息系统与技术,2022,13(4):19-25,31. WU Yunchao,FU Chen,ZHANG Ningxin. Construction of agent modeling framework for digital twin battlefield[J]. Command Information System and Technology,2022,13(4):19-25,31.
[14] 王龙,黄锋. 多智能体博弈、学习与控制[J]. 自动化学报,2023,49(3):1-34. DOI: 10.16383/j.aas.c220680 WANG Long,HUANG Feng. An interdisciplinary survey of multi-agent games,learning,and control[J]. Acta Automatica Sinica,2023,49(3):1-34. DOI: 10.16383/j.aas.c220680
[15] 李梅,康济童,刘晖,等. 基于BIM与GIS的矿山巷道参数化三维建模技术研究[J]. 煤炭科学技术,2022,50(7):25-35. LI Mei,KANG Jitong,LIU Hui,et al. Research on parametric 3D modeling technology of mine roadway based on BIM and GIS[J]. Coal Science and Technology,2022,50(7):25-35.
[16] 卢阳. 基于感知的并行离散事件仿真组件连接关系建模技术研究[D]. 长沙: 国防科学技术大学, 2012. LU Yang. Research on component connection modeling technology of parallel discrete event simulation based on perception [D]. Changsha: National University of Defense Technology, 2012.
[17] 蔡安江,刘俊强,刘亚东,等. 基于隐式数字孪生的采煤机自主调高策略研究[J]. 矿业研究与开发,2022,42(11):188-194. CAI Anjiang,LIU Junqiang,LIU Yadong,et al. Research on the strategy of independent height adjustment of shearer based on implicit digital twin[J]. Mining Research and Development,2022,42(11):188-194.
[18] 杨桂香,卢洪坤,梁敏富. 两柱式液压支架姿态角矢量解算模型[J]. 煤矿机械,2022,43(11):31-33. YANG Guixiang,LU Hongkun,LIANG Minfu. Two-column hydraulic support attitude angle vector solution model[J]. Coal Mine Machinery,2022,43(11):31-33.
[19] 苏岐芳, 陈科. 两类求解非线性方程的高阶算法[J/OL]. 数学的实践与认识: 1-10[2023-02-06]. http://kns.cnki.net/kcms/detail/11.2018.o1.20221125.1406.032.html. SU Qifang, CHEN Ke. Two classes of higher-order algorithms for solving nonlinear equations [J/OL]. Mathematics in Practice and Theory: 1-10 [2023-02-06]. http://kns.cnki.net/kcms/detail/11.2018.o1.20221125.1406.032.html.
[20] 李祖旭. 刮板输送机形态监测技术研究[D].徐州: 中国矿业大学, 2022. LI Zuxu. Research on shape monitoring technology of scraper conveyor[D].Xuzhou: China University of Mining and Technology, 2022.
[21] 张文静. 基于PLC采煤机与刮板输送机联动控制技术研究[J]. 山东煤炭科技,2022,40(12):135-137. ZHANG Wenjing. Research on linkage control technology of shearer and scraper conveyor based on PLC[J]. Shandong Coal Science and Technology,2022,40(12):135-137.
[22] 胡相捧, 刘新华. 两柱掩护式液压支架初撑过程的机构演化机理[J/OL]. 煤炭科学技术:1-12[2023-02-06]. https://doi.org/10.13199/j.cnki.cst.2022-1055. HU Xiangpeng, LIU Xinhua. Mechanism evolution mechanism of active support process of two-leg shield[J/OL]. Coal Science and Technology: 1-12 [2023-02-06]. https://doi.org/10.13199/j.cnki.cst.2022-1055.
-
期刊类型引用(3)
1. 查丽娟,申商坤. 近距离煤层群上行开采可行性研究. 煤炭技术. 2023(07): 67-70 .  百度学术
百度学术
2. 王全征. 综放开采工作面下覆煤层采空区探测及充填加固技术研究. 中国矿山工程. 2023(06): 40-44+50 . 百度学术
3. 杨增强,崔蓬勃,白洋,任长乐. 近距离煤层下行开采上保护层工作面合理布置研究. 江苏建筑职业技术学院学报. 2022(03): 1-7 . 百度学术
其他类型引用(2)
























计量
- 文章访问数: 1432
- HTML全文浏览量: 43
- PDF下载量: 133
- 被引次数: 5
