Adaptive control method for drilling robot based on coal and rock drillability
-
摘要: 由于含煤地层的地质力学环境复杂,导致钻孔机器人给进系统的给进阻力和回转系统的负载转矩复杂多样。现有技术仅通过既定程序控制执行机构进行流程化的动作,钻进过程的自适应智能控制水平低,当钻进工况变化时易造成卡钻、断钻等事故,降低钻孔机器人的钻进效率,影响工作周期。针对该问题,提出一种基于煤岩可钻性的钻孔机器人给进回转双回路PID自适应控制方法。首先以钻进效率和钻进安全为控制目标,选择钻压、转矩作为煤岩可钻性模型的输入参数,运用小波包分解对钻进过程数据进行特征提取,得到样本数据和测试集,利用BP神经网络进行训练和验证,建立煤岩可钻性模型,获取当前钻进工况下推荐钻速和转速。然后基于煤岩可钻性模型,设计了基于PID控制的恒转矩控制策略和恒钻速控制策略,钻孔机器人给进回转控制系统通过恒转矩控制回路对设定钻压进行调整以实现恒转矩控制,通过恒钻速控制回路对设定转矩进行调整以实现恒钻速控制,在确保其安全工作下提高钻进效率。最后建立反映给进回转负载的钻头−煤岩相互作用模型并对钻孔机器人给进回转双回路PID自适应控制方法进行仿真测试。结果表明:① 在煤岩硬度不变时,该控制方法可以实现恒转矩和恒钻速控制,转矩保持在2 000 N·m,钻速保持在6 mm/s。② 在50 s时,增大煤岩硬度,采用自适应调整策略后,钻孔机器人给进回转控制系统的钻压、转速等可以很快达到稳定状态。③ 若推荐钻速6 mm/s对应的实际转矩2 350 N·m超过钻孔机器人工作允许的负载转矩,且其实际转速85 r/min小于推荐转速的95%时,通过钻速微调模块降低推荐钻速设定值,进而通过调整钻压使钻孔机器人的转矩调整至最优转矩,确保钻孔机器人再次稳定在恒转矩和恒钻速控制状态。Abstract: Due to the complex geological and mechanical environment of coal-bearing strata, the feed resistance of the drilling rig feed system and the load torque of the rotary system are complex and diverse. The existing technology only controls the actuator through established procedures for procedural actions. The adaptive intelligent control level of the drilling process is low. When the drilling conditions change, it is easy to cause accidents such as sticking and breaking. It reduces the drilling efficiency of the drilling robot and affects the work cycle. To solve this problem, a dual loop PID adaptive control method for feed and rotation of drilling robots based on coal rock drillability is proposed. Firstly, with drilling efficiency and drilling safety as control objectives, drilling pressure and torque are selected as input parameters of the coal rock drillability model. Wavelet packet decomposition is used to extract features of drilling process data to obtain sample data and test set. BP neural network is used for training and verification to establish coal rock drillability model and obtain recommended drilling speed and rotation speed under current drilling conditions. Secondly, based on the coal rock drillability model, a constant torque control strategy and a constant drilling speed control strategy based on PID control are designed. The drilling robot feed rotation control system adjusts the set drilling pressure through a constant torque control circuit to achieve constant torque control. The system adjusts the set torque through a constant drilling speed control circuit to achieve constant drilling speed control, improving drilling efficiency while ensuring its safe operation. Finally, A drill-rock interaction model reflecting the feed swing load is developed. The simulation testing is conducted on the dual loop PID adaptive control method for the feed rotation of the drilling robot. The results show the following points. ① When the hardness of coal and rock remains unchanged, this control method can achieve constant torque and constant drilling speed control, with torque maintained at 2 000 N·m and drilling speed maintained at 6 mm/s. ② At 50 seconds, by increasing the hardness of coal and rock and adopting an adaptive adjustment strategy, the drilling robot can quickly reach a stable state in terms of drilling pressure, rotation speed for the rotary control system. ③ If the recommended drilling speed of 6 mm/s corresponds to an actual torque of 2 350 N·m which exceeds the permissible load torque for the operation of the drilling robot and the actual speed of 85 r/min is less than 95% of the recommended speed, the recommended drilling speed setting is reduced by means of the drilling speed trim module. The drilling pressure is adjusted to adjust the drilling robot's torque to the optimal torque, ensuring that the drilling robot is stable again in the constant torque and constant drilling speed control state.
-
0. 引言
在煤矿智能化建设背景下,智能化钻探技术已成为满足地质保障需求的钻探装备智能化、探测过程数字化及地质工程信息化有效融合的技术支撑[1]。钻孔机器人是煤矿智能化钻探技术系统中的重要载体[2],在国家煤矿安全监察局2019年发布的《煤矿机器人重点研发目录》中,明确提出了3种钻孔机器人,分别为探水、防突和防冲钻孔机器人,其基本要求具有自感知、自学习、自决策与自执行的4个智能要素。
为提高钻探过程的智能化程度,脱离或弱化对于人工经验的依赖,确保钻探安全与提升钻探效率,近年来在煤矿井下自动化钻孔机器人的基础上,自适应控制技术作为智能化钻探的关键技术不断取得进步。许多学者提出通过采集钻孔机器人运行参数,建立精确的数学模型[3-6],以实现钻压、钻速和回转压力等的优化控制。翁寅生等[7]使用编码器、流量传感器和压力变送器等构建了钻孔机器人参数测量系统,对钻孔机器人转速、钻速和钻压等进行实时监测,以便施工人员及时调整参数。马斌等[8]研究了分布式传感器的布置方法,通过对比传感器检测数据与给定阈值,实施钻孔机器人相关机构的调整。王清峰等[9-10]开发了基于差分进化算法的自适应控制技术,实现了钻孔机器人控制向量的自动优化。董洪波等[11]在钻孔机器人单动控制基础上进行了钻孔机器人自动钻进和自动起钻技术研究,有效提高了钻孔机器人的自动化水平。张锐等[12]采用钻孔机器人控制系统实时监测和反馈控制钻进参数,实现常规回转钻孔机器人的自动钻进。
由于含煤地层的地质力学环境复杂,断层、陷落柱、构造带等地质异常体非线性、强耦合、强干扰特征突出,导致钻孔机器人给进系统的给进阻力和回转系统的负载转矩复杂多样。这就要求钻孔机器人给进回转系统能够适应煤岩的变化,而现有技术仅通过既定程序控制执行机构进行流程化动作,钻进过程的自适应智能控制水平低,对钻进过程中遇到的工况变化调节能力弱,当钻进工况变化时易造成卡钻、断钻等事故,降低钻孔机器人的钻进效率,影响工作周期。
本文以钻进效率和钻进安全为控制目标,建立钻孔机器人给进回转自适应控制系统。研究钻孔机器人给进系统的钻速、回转系统的转矩适应煤岩变化的智能感知与控制技术,建立基于煤岩可钻性的给进回转模型,提出钻孔机器人给进回转双回路PID自适应控制方法,基于恒转矩和恒钻速控制策略,实现钻孔机器人给进回转系统钻速和转矩的自适应调节。
1. 钻孔机器人给进回转自适应控制系统
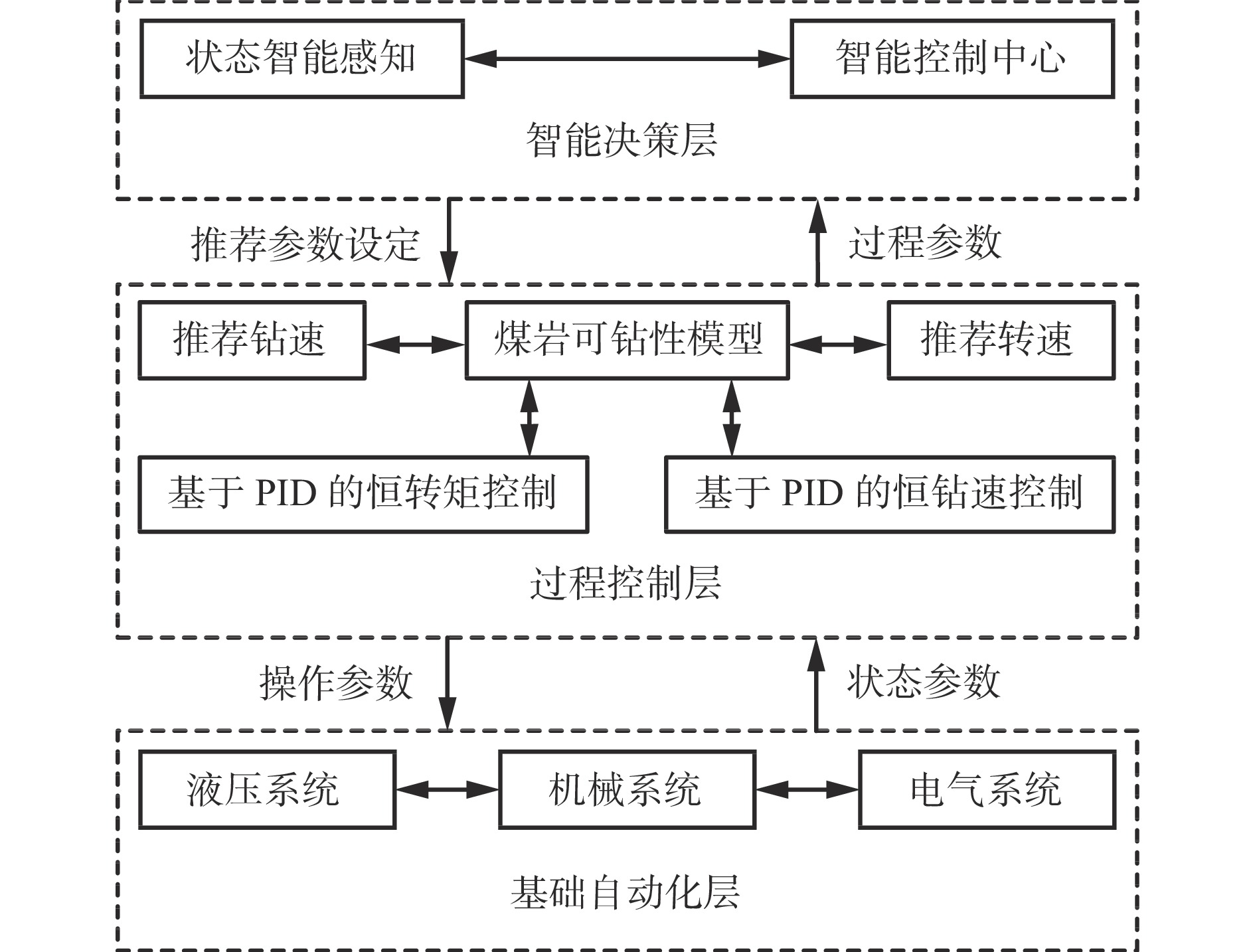
钻孔机器人给进回转自适应控制系统旨在钻进状态感知的基础上通过智能控制中心决策,适应煤岩的硬度变化,实现安全高效钻进。钻孔机器人给进回转自适应控制系统如图1所示。该系统基于智能钻探系统软件架构与数据框架的分层递阶设计思想,集成包括基础自动化层、过程控制层和智能决策层的闭环控制系统。其中智能决策层是钻孔机器人实现智能化钻探的核心,通过钻进状态智能感知,结合钻进过程控制,实现闭环控制。本文重点研究钻进过程控制,最优化地调整钻压、流量等可控参数,实现基于煤岩可钻性的推荐钻速、转速和目标转矩的自适应控制,从而实施安全高效钻进。
1.1 钻孔机器人状态智能感知
复杂地质环境下的钻进状态智能感知是人工智能技术与坑道钻探技术的交叉融合,其原理是运用人工智能技术,将物理世界的信息通过传感器等感知硬件映射到数字空间,再将这些数字信息进一步提升至可认知层次,用于记忆、理解、规划和决策等活动,为钻孔机器人控制系统实现复杂钻探环境感知理解、地层判定、安全辨识等提供基础支撑[13-16]。
根据钻孔机器人对自身功能信息的数据要求,利用先进的传感技术,构建钻探装备状态智能感知系统,将钻孔机器人施工过程中的钻压、钻速、转速、转矩、泵压、钻孔深度等相关信息,实时显示在机载防爆计算机上,同时采用各种智能诊断算法判断设备健康状态,对初发故障提供前期检测,对预兆故障进行预报和管理。典型钻孔机器人状态智能感知系统采用上下位机模块化结构设计方式,通过CAN总线进行通信。下位机包括传感器和信号采集器等硬件,对钻孔机器人状态参数进行采集;上位机为防爆计算机,其内置监测诊断软件,对数据进行转换、显示和存储。
1.2 钻孔机器人智能控制中心
针对常规回转钻进过度依赖人工操控问题,通过状态智能感知获取高价值密度的钻进数据,以实现最优钻速、转速、钻压等钻进参数的在线优化设计和钻进操作参数的智能决策[17-19]。
钻孔机器人智能控制中心基于状态智能感知、煤岩可钻性、工程历史数据等多源信息,决策当前最优操作参数,能够将钻进工艺与自动化、智能化技术相结合,通过网络和通信系统实现数据自动采集、信息双向高速传输、实时分析与决策、钻进优化控制,形成基于煤岩地层条件的自适应钻进控制技术,实现基于PID的恒转矩控制和恒钻速控制,从而有效提升煤矿坑道钻探过程的施工安全和钻进效率。
2. 基于煤岩可钻性的给进回转模型
基于煤岩可钻性的给进回转模型主要通过煤岩可钻性建模获取当前钻进工况下的推荐钻速和转速,进而在恒转矩控制的基础上实现对钻孔机器人钻速和转速的控制。
2.1 煤岩可钻性建模
1) 特征获取。钻孔机器人钻进过程中工况复杂,传感器获取的回转压力和钻压信号频率不集中,受到煤岩干扰多,且信号波动较大,难以用确定的函数进行拟合,难以从信号本身判断当前工况下的煤岩可钻性,因此,采用小波包变换对钻孔机器人的状态参数进行特征提取。
选取钻孔机器人的钻压和转矩作为煤岩可钻性识别的输入信号,采用三级小波包分解法将钻压和转矩进行分解[19],分解后信号重构函数的数学表达式为
S3=S31+S32+S33+S34+S35+S36+S37+S38 (1) 式中:S3为信号重构函数;S3j为三级小波包分解后第j个频段信号重构函数,j=1,2,…,8。
重构信号的能量为
{{\boldsymbol{E}}_{3j}} = \int {{{\left| {{S_{3j}}(t)} \right|}^2}{\rm{d}}t} (2) 式中t为时间。
将重构信号的能量{{\boldsymbol{E}}_{3j}}作为各频段信号的特征,对钻压和转矩进行特征提取,则特征向量为
{\boldsymbol{E}} = [{{\boldsymbol{E}}_{31j}}\;\;{{\boldsymbol{E}}_{32j}}] (3) 式中:{{\boldsymbol{E}}_{31j}}为钻压分解后的第j个频段信号特征向量;{{\boldsymbol{E}}_{3{\text{2}}j}}为转矩分解后的第j个频段信号特征向量。
2) 特征筛选。不是每个频段的信息都能够反映煤岩可钻性,需要对特征分量进行筛选,因此,采用皮尔逊相关性分析方法将特征向量E中的每个分量与煤岩可钻性进行相关性分析,得到与煤岩可钻性相关性强的分量,组成强相关特征向量:
{{\boldsymbol{E}}'} = [{\boldsymbol{E}}_{31m}'\;\;{\boldsymbol{E}}_{32n}'] (4) 式中: {\boldsymbol{E}}_{31m}' 为钻压分解后的第m个频段信号强相关特征向量; {\boldsymbol{E}}_{32n}' 为转矩分解后的第n个频段信号强相关特征向量。
对强相关性特征向量{\boldsymbol{E}}'进行归一化,得到归一化特征向量:
{\boldsymbol{E}}''=\left[\frac{{\boldsymbol{E}}_{31 m}^{\prime}}{\displaystyle\sum_{m=1}^{8} {\boldsymbol{E}}_{31 m}^{\prime}+\displaystyle\sum_{n=1}^{8} {\boldsymbol{E}}_{32 n}^{\prime}} \frac{{\boldsymbol{E}}_{32 n}^{\prime}}{\displaystyle\sum_{m=1}^{8} {\boldsymbol{E}}_{31 m}^{\prime}+\displaystyle\sum_{n=1}^{8} {\boldsymbol{E}}_{32 n}^{\prime}}\right] (5) 3) 煤岩可钻性模型建立。以归一化后的强相关性特征向量作为BP神经网络的输入量,对BP神经网络进行训练,得到煤岩可钻性模型。
y = O\left( {\left[ {{\omega _1}{\omega _2} \cdots {\omega _g}} \right] {{\left[ {{y_1}{y_2} \cdots {y_g}} \right]}^{\rm{T}}} + b} \right) (6) 式中: y 为BP神经网络的输出;O(\cdot) 为输出函数;\omega {}_i为第i个(i=1,2,···,g,g为输出层总数)输出层的权值;yi为第i个BP神经网络的输出;b为输出层的阈值。
在煤岩可钻性模型中,BP神经网络的输出范围为[0,1]。由于在煤岩中可能存在硬度大于5的岩层,所以煤岩硬度的取值范围为[0.5,10]。通过线性映射将BP神经网络的输出映射为煤岩硬度:
f = 9.5y + 0.5 (7) 2.2 确定推荐钻速和转速
Tiberius Cove的研究表明[20],针对不同种类的岩石,不同钻具都存在推荐转速,且该推荐转速与岩石的硬度和钻具有效直径的平方根的乘积呈反比例关系。因此,根据煤岩可钻性模型获取的煤岩硬度和钻具有效直径,得到当前工况下的推荐转速:
l = {l_0} + \frac{{{a_1}}}{{\sqrt D f}} (8) 式中:l0为钻孔机器人在相同工况下转速的均值;a1为回转切削速度常数; D 为钻具有效直径。
根据煤矿井下坑道钻探装备实际钻进经验可知,推荐钻速与岩石的硬度和钻具有效直径的乘积呈反比例关系。因此,根据煤岩可钻性模型获取的煤岩硬度和钻具有效直径,得到当前工况下的推荐钻速:
v = {v_0} + \frac{{{a_2}}}{{Df}} (9) 式中: {v_0} 为钻孔机器人在相同工况下钻速的均值;a2为给进钻速常数。
3. 钻孔机器人给进回转系统自适应控制策略
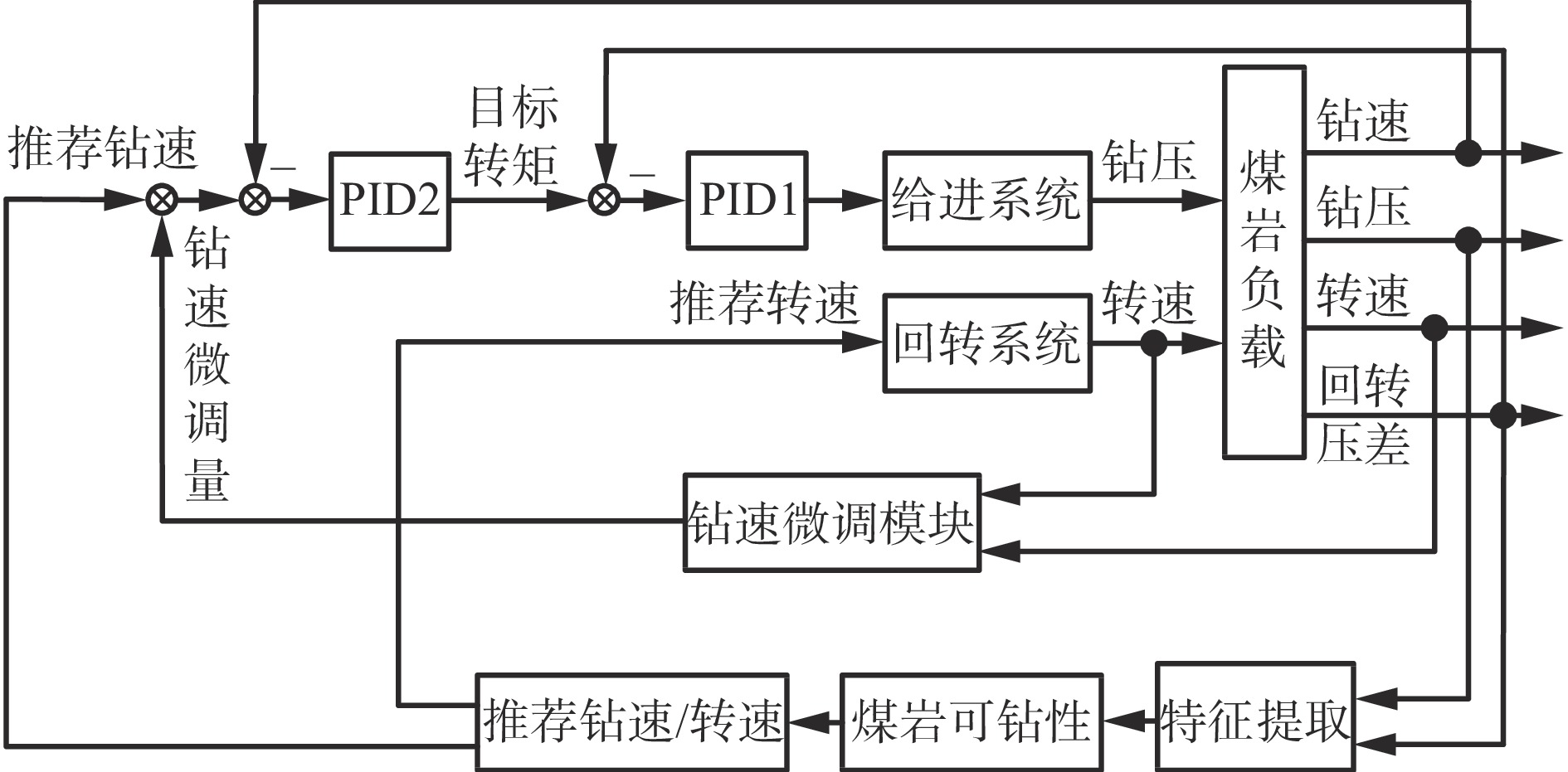
钻孔机器人给进回转控制系统采用双回路PID自适应控制方法,该控制系统主要由恒转矩控制模块PID1、恒钻速控制模块PID2和钻速微调模块3个部分组成。钻孔机器人在煤岩负载中的转矩信号输入PID1,输出钻压信号;钻孔机器人在煤岩负载中的钻速信号和基于煤岩可钻性模型的推荐钻速信号输入PID2,输出目标转矩信号;回转系统的转速信号和钻孔机器人在煤岩负载中的转速信号输入钻速微调模块,输出钻速微调量。给进回转自适应控制系统结构如图2所示。基于煤岩可钻性获取当前钻进工况的推荐钻速和转速,在恒转矩控制回路PID1和恒钻速控制回路PID2的相互作用下实现钻孔机器人推荐钻速的微调,保证钻孔机器人安全高效运行。
3.1 基于PID控制的恒转矩控制策略
恒转矩控制回路PID1通过调整钻压实现恒转矩控制。当回转转矩较大时,适当减小钻压,降低钻速,防止钻进负载过大,造成卡钻等事故;当回转转矩较小时,可以适当增加钻压,提高钻速。基于设定的目标转矩,使系统能够时刻保持最佳钻进负载,使系统在安全的基础上以最大效率工作。考虑到转矩与回转压差呈正相关关系,因此恒转矩控制器的设定值为目标转矩对应的回转压差,反馈量为当前时刻对应的回转压差,控制器采用积分分离PI控制器,可有效避免恒转矩控制系统中积分项过大,减小影响系统调节时间。控制器的输出为
{P_{\rm{F}}} = {k_{\rm{p}}}{e_{\rm{p}}} + \varepsilon ({e_{\rm{p}}}){k_{\rm{i}}}{e_{\rm{p}}} (10) \varepsilon ({e_{\rm{p}}}){{ = }}\left\{ {\begin{array}{*{20}{c}} {\text{0}}&{{e_{\rm{p}}} > {e_{{\rm{p}}\_}}_{{\rm{set}}}} \\ {\text{1}}&{{e_{\rm{p}}} \leqslant {e_{{\rm{p}}\_}}_{{\rm{set}}}} \end{array}} \right. (11) 式中:{P_{\rm{F}}}为控制器输出给钻孔机器人给进系统的钻压;kp为比例调节系数;{e_{\rm{p}}}为误差;ε为启动信号;ki为积分调节系数;{e_{{\rm{p}}\_}}_{{\rm{set}}}为根据钻孔机器人性能设置的误差积分上限。
3.2 基于PID控制的恒钻速控制策略
在钻孔机器人钻进过程中,煤层负载复杂多样,只采用恒转矩控制难以实现理想的控制效果。当煤层硬度突然变小,如果保持回转压差不变,会使系统的钻压过高,钻速过快,钻进过程的安全性降低;当煤层硬度突然变大,会使系统的钻速较慢,此时应适当地增加回转压差。因此,根据钻速对目标转矩进行微调,以推荐钻速和实际钻速的误差为输入,设计控制器PID2,PID2输出的转矩信号作为最优转矩信号输入到PID1中,实现恒钻速控制,使系统能够安全高效地运行。
当推荐钻速对于当前工况过大时,会导致钻孔机器人的回转转矩过大,进而导致系统的转速降低。因此,以实际转速与推荐转速的偏差对推荐钻速进行微调,设定钻速为
{v_{{\rm{set}}}} = v - \frac{{{k_{\rm{i}}}}}{{\rm{s}}}\varepsilon( R_{{{\rm{now}}}}) (12) \varepsilon( R_{{{\rm{now}}}}) = \left\{ {\begin{array}{*{20}{c}} 0&{R_{{\rm{now}}} > R_{{{\rm{set}}}} - R_{0}} \\ 1&{R_{{{\rm{now}}}} < R_{{{\rm{set}}}} - R_{0}} \end{array}} \right. (13) 式中:R_{{{\rm{now}}}}为转速的测量值;R_{{{\rm{set}}}}为转速的设定值;R_{0}为转速可降低的阈值;1/s为积分运算。
当实际转速小于推荐转速的转速区间时,减小推荐钻速,进而降低系统的回转转矩和钻压,使得钻孔机器人工作在安全范围内。
4. 仿真测试
4.1 给进回转负载仿真模型建立
在钻孔机器人钻进过程中,钻头的钻压主要是由煤岩阻力产生,内聚阻尼模型描述了钻头和煤岩在轴向的相互作用[21]。
{F_{\rm{d}}} = {k_{\rm{r}}}\dot x (14) 式中:{F_{\rm{d}}}为钻头和煤层之间的相互作用力;{k_{\rm{r}}}为煤层的渗透阻力系数,取决于煤层硬度;\dot x为钻头的钻速。
钻孔机器人的回转转矩是由于钻进过程中钻头旋转切削煤岩,使钻头和煤岩在旋转方向相互作用,产生回转转矩,Karnopp模型[22]描述了转速、钻压和回转阻力之间的关系。
T\left( {l,{F_{\rm{d}}}} \right) = {\mu _{\rm{b}}}\left( l \right){F_{\rm{d}}}{L_{\rm{b}}}{{\rm{sgn}}} (l) (15) {\mu _{\rm{b}}}\left( l \right) = {\mu _{{\rm{cb}}}} + \left( {{\mu _{{\rm{sb}}}} + {\mu _{{\rm{cb}}}}} \right)\exp ( - {\gamma _{\rm{b}}}l) (16) 式中:T为回转转矩;\;{\mu _{\rm{b}}}为干摩擦因数;{L_{\rm{b}}}为钻头直径;\;{\mu _{{\rm{sb}}}},{\mu _{{\rm{cb}}}}分别为钻头的静摩擦因数和滑动摩擦因数,取决于煤岩硬度;{\gamma _{\rm{b}}}为速度衰减率。
通过Karnopp模型和实际钻进工艺分析,建立反映给进回转负载的钻头−煤岩相互作用模型,回转系统反映钻进负载的回转转矩,通过改变钻压可实现转矩和钻速的改变。
4.2 仿真效果分析
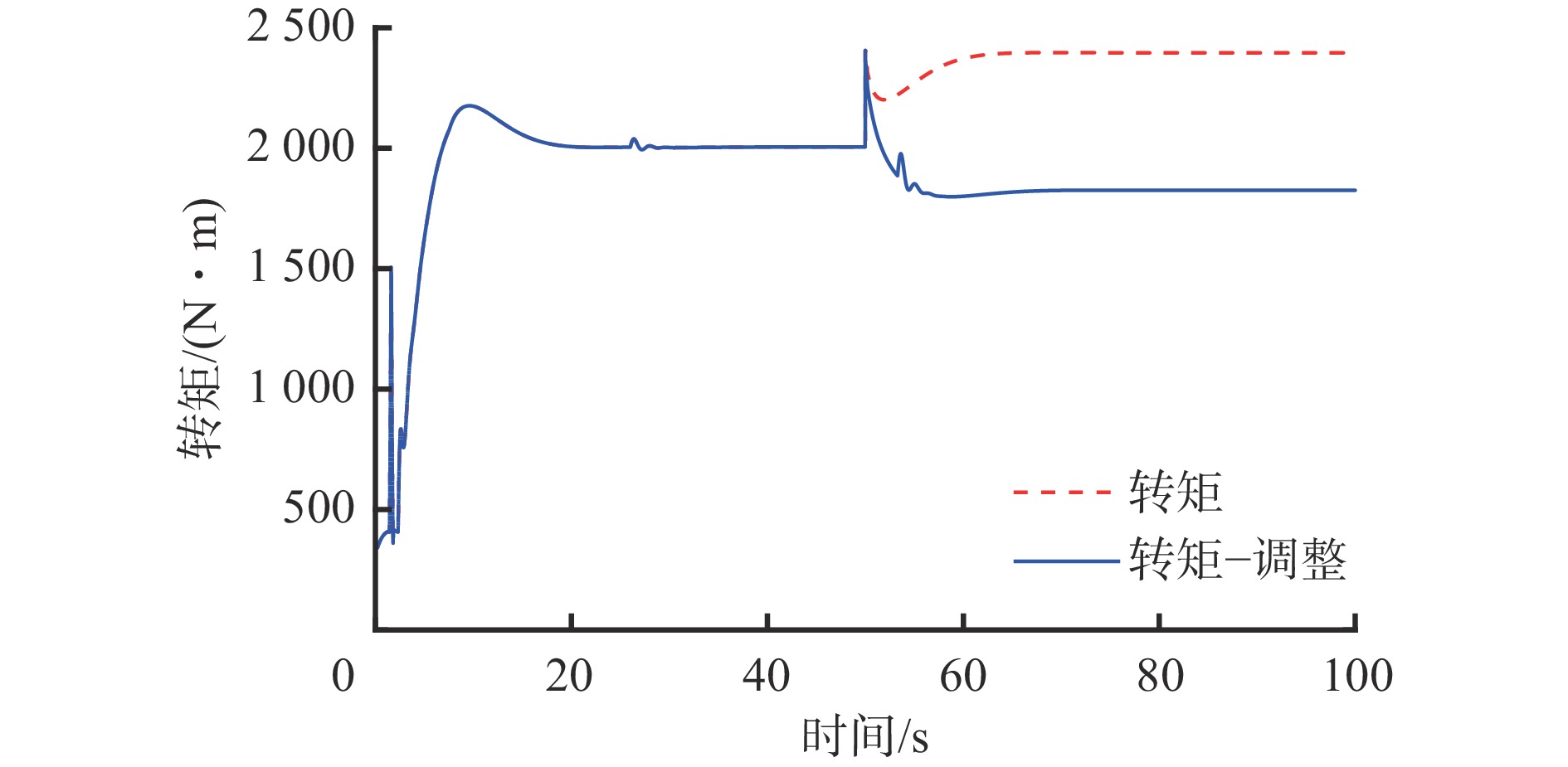
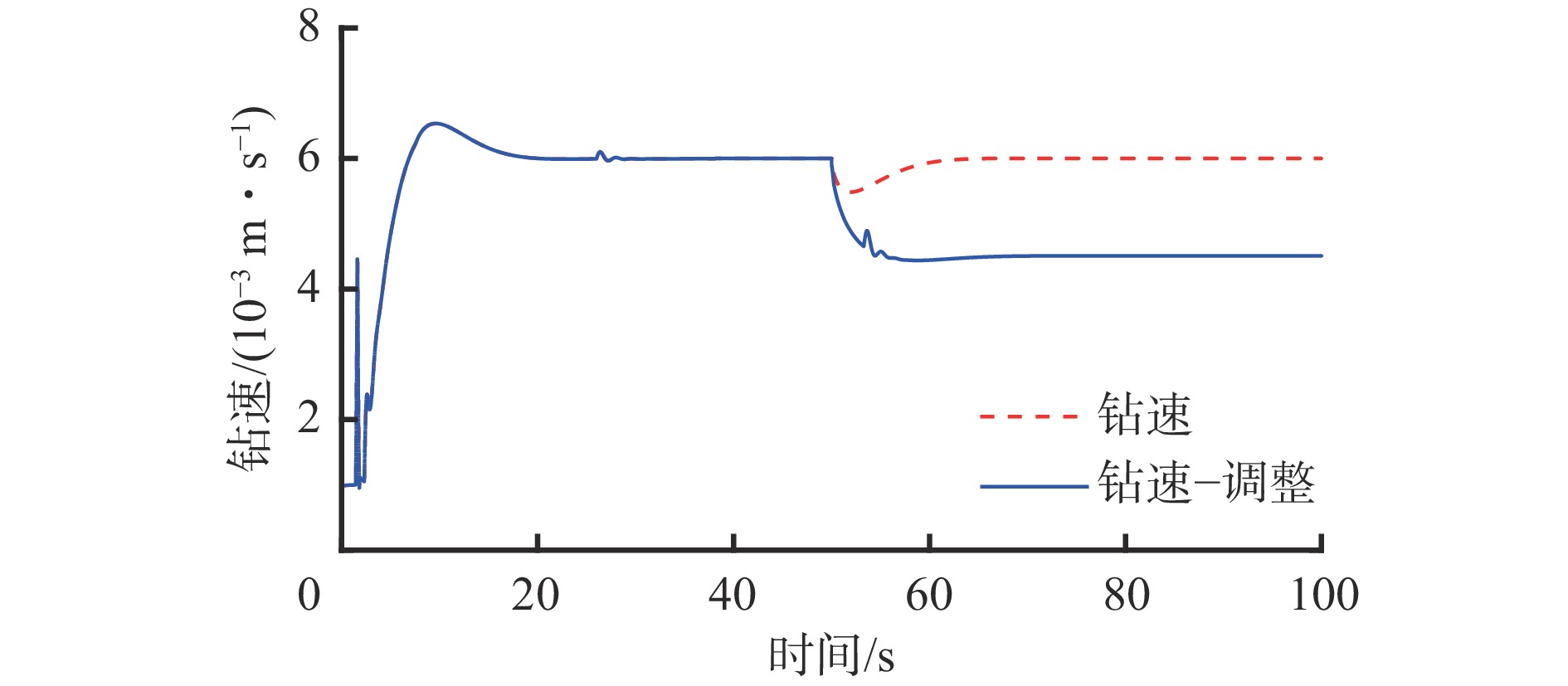
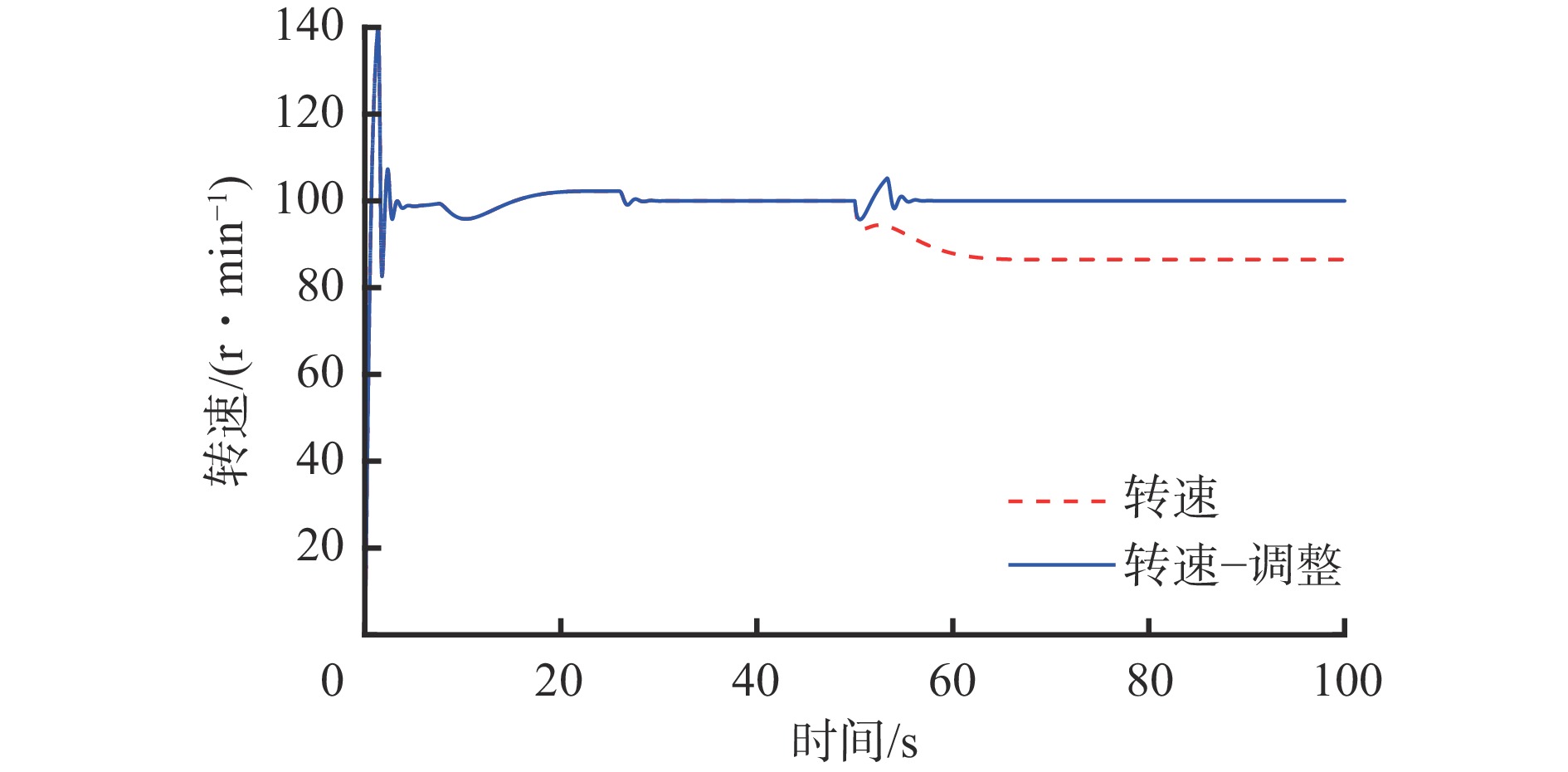
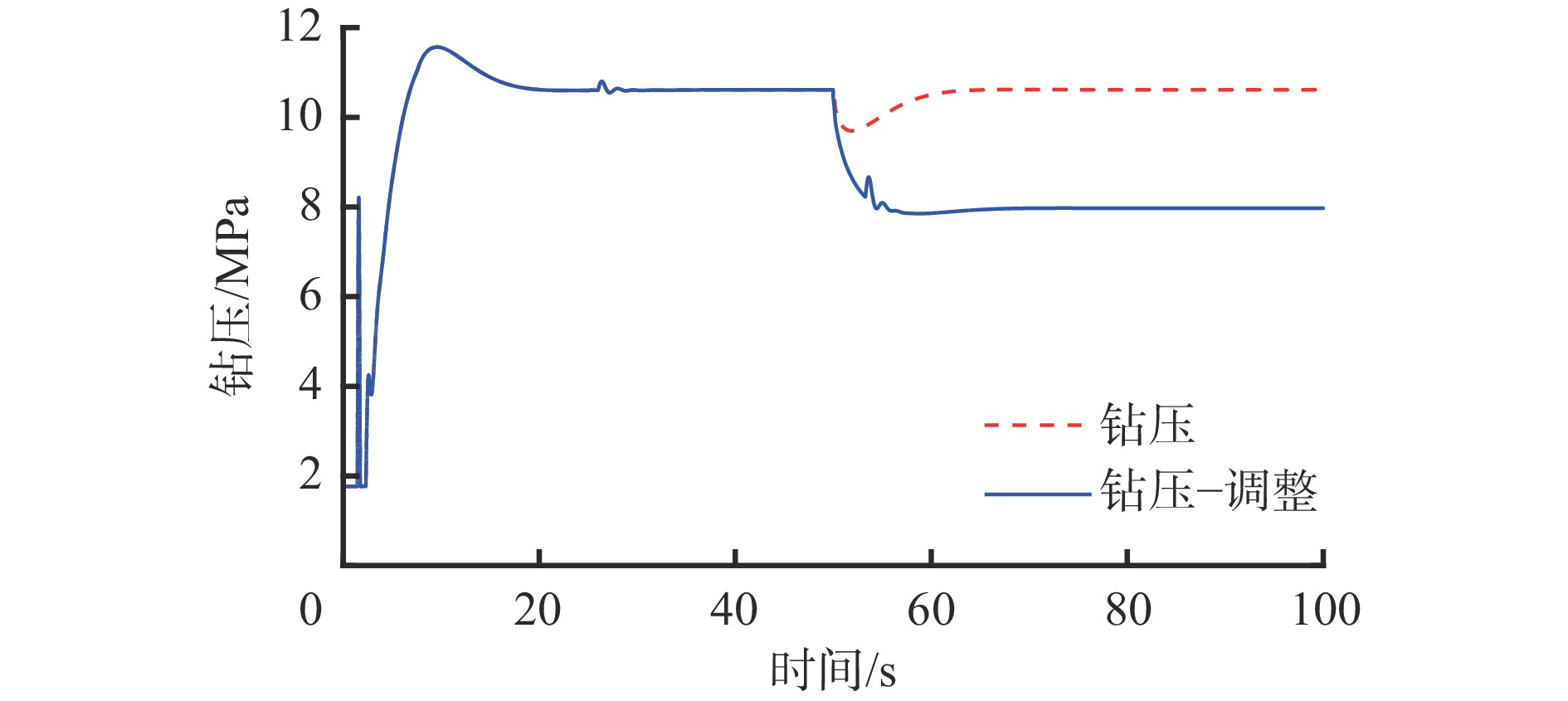
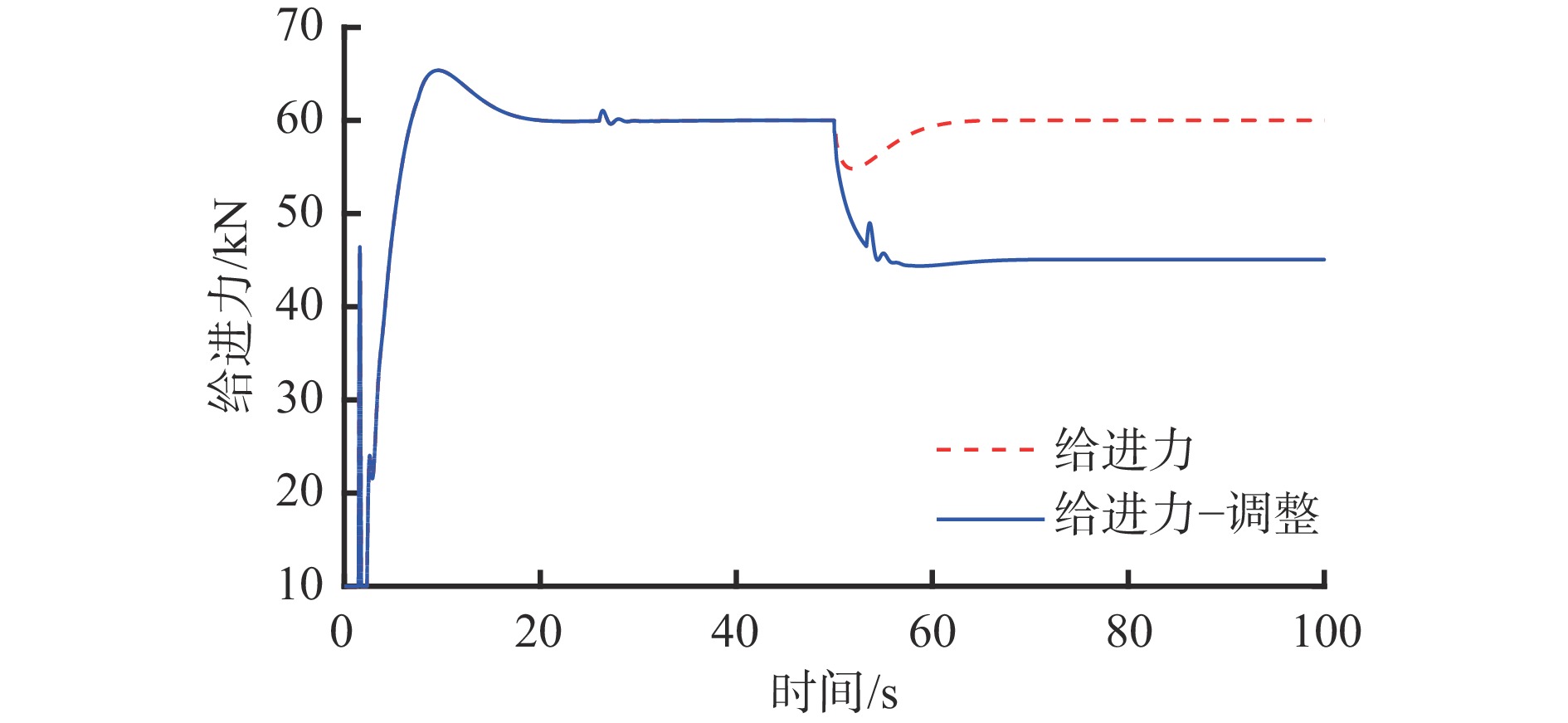
为了对钻孔机器人给进回转自适应控制系统的控制效果进行验证,设计了仿真试验进行测试。设钻孔机器人正常工作时的额定转矩为2 000 N·m,推荐钻速为6 mm/s,推荐转速为100 r/min,此时系统对应的钻压为10 MPa,给进力为60 kN,得出的仿真结果如图3−图7所示。可看出在煤岩硬度不变时,该控制系统可实现恒转矩和恒钻速控制,转矩保持在2 000 N·m,钻速保持在6 mm/s;在50 s时,增大煤岩硬度,若对推荐钻速不作任何调整,则由于煤岩硬度变高,导致负载增加,使系统转矩增大至2 350 N·m,转速降低至85 r/min;采用自适应调整策略后,系统的钻压、转速等可以很快达到稳定状态;若推荐钻速6 mm/s对应的实际转矩2 350 N·m超过钻孔机器人工作允许的负载转矩,且其实际转速85 r/min小于推荐转速的95%时,则可以通过钻速微调模块降低推荐钻速设定值,进而通过调整钻压使系统的转矩调整至最优转矩,使钻孔机器人再次稳定在恒转矩和恒钻速控制状态,确保钻孔机器人安全高效工作。
![图 5 设定钻速调整下的转速变化]() 图 5 设定钻速调整下的转速变化Figure 5. Rotational speed change under set drilling speed adjustment
图 5 设定钻速调整下的转速变化Figure 5. Rotational speed change under set drilling speed adjustment![图 6 设定钻速调整下的钻压变化]() 图 6 设定钻速调整下的钻压变化Figure 6. Drilling pressure change under set drilling speed adjustment
图 6 设定钻速调整下的钻压变化Figure 6. Drilling pressure change under set drilling speed adjustment5. 结论
1) 根据钻孔机器人的钻进过程和工作特性,基于钻孔机器人状态智能感知系统提取与煤岩可钻性强相关的状态特征,建立煤岩可钻性模型,并获取基于煤岩可钻性的推荐钻速和转速。
2) 提出基于煤岩可钻性的钻孔机器人给进回转双回路PID自适应控制方法,包括基于PID控制的恒转矩控制策略和基于PID控制的恒钻速控制策略,可实现基于煤岩可钻性的推荐钻速和转矩的自适应控制。
3) 通过Karnopp模型和实际钻进工艺分析,建立钻头−煤岩相互作用仿真模型并进行仿真测试分析,验证了该控制系统可实现恒转矩和恒钻速的智能控制,有效提升钻进过程效率,降低钻进过程风险,可解决传统钻进过程对于人工经验的过度依赖。
-
![]()
图 5 设定钻速调整下的转速变化
Figure 5. Rotational speed change under set drilling speed adjustment
![]()
图 6 设定钻速调整下的钻压变化
Figure 6. Drilling pressure change under set drilling speed adjustment
-
[1] 石智军,李泉新,姚克. 煤矿井下智能化定向钻探发展路径与关键技术分析[J]. 煤炭学报,2020,45(6):2217-2224. SHI Zhijun,LI Quanxin,YAO Ke. Development path and key technology analysis of intelligent directional drilling in underground coal mine[J]. Journal of China Coal Society,2020,45(6):2217-2224.
[2] 葛世荣,胡而已,裴文良. 煤矿机器人体系及关键技术[J]. 煤炭学报,2020,45(1):455-463. GE Shirong,HU Eryi,PEI Wenliang. Classification system and key technology of coal mine robot[J]. Journal of China Coal Society,2020,45(1):455-463.
[3] 柴天佑, 岳恒. 自适应控制[M]. 北京: 清华大学出版社, 2016. CHAI Tianyou, YUE Heng. Adaptive control[M]. Beijing: Tsinghua University Press, 2016.
[4] 张幼振,范涛,阚志涛,等. 煤矿巷道掘进超前钻探技术应用与发展[J]. 煤田地质与勘探,2021,49(5):286-293. ZHANG Youzhen,FAN Tao,KAN Zhitao,et al. Application and development of advanced drilling technology for coal mine roadway heading[J]. Coal Geology & Exploration,2021,49(5):286-293.
[5] 李泉新,刘飞,方俊. 煤矿坑道智能化钻探技术发展框架分析[J]. 工矿自动化,2020,46(10):9-13,25. LI Quanxin,LIU Fei,FANG Jun. Analysis of development framework of intelligent coal mine underground drilling technology[J]. Industry and Mine Automation,2020,46(10):9-13,25.
[6] LIAO Xiufeng,KHANDELWAL M,YANG Haiqing,et al. Effects of a proper feature selection on prediction and optimization of drilling rate using intelligent techniques[J]. Engineering with Computers,2020,36(2):499-510. DOI: 10.1007/s00366-019-00711-6
[7] 翁寅生,姚克,殷新胜. 坑道钻机参数测量系统及其在煤矿中的应用[J]. 煤矿安全,2016,47(11):117-119,123. WENG Yinsheng,YAO Ke,YIN Xinsheng. Application of parameter measuring system of tunnel drilling rig in coal mine[J]. Safety in Coal Mines,2016,47(11):117-119,123.
[8] 马斌,董洪波. 煤矿井下坑道钻机电液控制系统的设计[J]. 煤矿机械,2021,42(1):13-15. MA Bin,DONG Hongbo. Design of electro-hydraulic control system for underground coal mine tunnel drilling rig[J]. Coal Mine Machinery,2021,42(1):13-15.
[9] 王清峰,陈航,周涛. 煤矿井下自动化钻进技术及装备的发展历程与展望[J]. 矿业安全与环保,2022,49(4):45-50. WANG Qingfeng,CHEN Hang,ZHOU Tao. Development history and prospect of automatic drilling technology and equipment in coal mine[J]. Mining Safety & Environmental Protection,2022,49(4):45-50.
[10] 王清峰,陈航,陈玉涛. 钻孔机器人钻进工况智能感知与自适应控制机理研究[J]. 矿业安全与环保,2021,48(3):1-5. WANG Qingfeng,CHEN Hang,CHEN Yutao. Research on the mechanism of intelligent sensing and adaptive control in drilling condition of drilling robot[J]. Mining Safety & Environmental Protection,2021,48(3):1-5.
[11] 董洪波,姚宁平,马斌,等. 煤矿井下坑道钻机电控自动化技术研究[J]. 煤田地质与勘探,2020,48(3):219-224. DONG Hongbo,YAO Ningping,MA Bin,et al. Research on electronically controlled automation technology of underground drilling rig for coal mine[J]. Coal Geology & Exploration,2020,48(3):219-224.
[12] 张锐,姚克,方鹏,等. 煤矿井下自动化钻机研发关键技术[J]. 煤炭科学技术,2019,47(5):59-63. ZHANG Rui,YAO Ke,FANG Peng,et al. Key technologies for research and development of automatic drilling rig in underground coal mine[J]. Coal Science and Technology,2019,47(5):59-63.
[13] 张幼振,张宁,邵俊杰,等. 基于钻进参数聚类的含煤地层岩性模糊识别[J]. 煤炭学报,2019,44(8):2328-2335. ZHANG Youzhen,ZHANG Ning,SHAO Junjie,et al. Fuzzy identification of coal-bearing strata lithology based on drilling parameter clustering[J]. Journal of China Coal Society,2019,44(8):2328-2335.
[14] 谢志江,常雪,杨林,等. 基于机械比能理论的煤岩可钻性分级方法[J]. 煤田地质与勘探,2021,49(3):236-243. DOI: 10.3969/j.issn.1001-1986.2021.03.030 XIE Zhijiang,CHANG Xue,YANG Lin,et al. Classification method of coal and rock drillability based on mechanical specific energy theory[J]. Coal Geology & Exploration,2021,49(3):236-243. DOI: 10.3969/j.issn.1001-1986.2021.03.030
[15] 方鹏. 煤矿坑道定向钻机钻进参数监测系统设计[J]. 工矿自动化2019, 45(1): 1-5. FANG Peng. Design of drilling parameters monitoring system of directional drilling rig in coal mine tunnel[J]. Industry and Mine Automation, 2019, 45(1): 1-5.
[16] 吴敏, 曹卫华, 陈鑫, 等. 复杂地质钻进过程智能控制[M]. 北京: 科学出版社, 2022. WU Min, CAO Weihua, CHEN Xin, et al. Intelligent control of the complex geological drilling process[M]. Beijing: Science Press, 2022.
[17] GAN Chao,CAO Weihua,LIU Kangzhi,et al. A novel dynamic model for the online prediction of rate of penetration and its industrial application to a drilling process[J]. Journal of Process Control,2022,109:83-92. DOI: 10.1016/j.jprocont.2021.12.002
[18] 苏义脑. 井下控制工程学概述及其研究进展[J]. 石油勘探与开发,2018,45(4):754-763. DOI: 10.11698/PED.2018.04.16 SU Yi'nao. Introduction to the theory and technology on downhole control engineering and its research progress[J]. Petroleum Exploration and Development,2018,45(4):754-763. DOI: 10.11698/PED.2018.04.16
[19] 胡业林,代斌,宋晓. 基于小波包和AFSA−SVM的电机故障诊断[J]. 电子测量技术,2021,44(2):48-55. DOI: 10.19651/j.cnki.emt.2005463 HU Yelin,DAI Bin,SONG Xiao. Motor fault diagnosis based on wavelet packet and AFSA-SVM[J]. Electronic Measurement Technology,2021,44(2):48-55. DOI: 10.19651/j.cnki.emt.2005463
[20] GUO Yinan,CHENG Wei,GONG Dunwei,et al. Adaptively robust rotary speed control of an anchor-hole driller under varied surrounding rock environments[J]. Control Engineering Practice,2019,86:24-36. DOI: 10.1016/j.conengprac.2019.02.002
[21] MA S, WU Min, CHEN Luefeng, et al. Robust mixed-sensitivity H∞ control of weight on bit in geological drilling process with parameter uncertainty[J]. Journal of the Franklin Institute, 2021(17).
[22] NAVARRO-LOPEZ E M, CORTES D. Sliding-mode control of a multi-dof oilwell drillstring with stick-slip oscillations[C]. Proceedings of the 2007 American Control Conference, New York, 2007: 3837-3842.
-
期刊类型引用(11)
1. 张刚. 自动防喷一体式钻孔机器人的设计与研究. 煤矿机械. 2025(09)  百度学术
百度学术
2. 初绍飞. 智能控制技术在矿山钻机精准钻进中的应用. 工矿自动化. 2025(S1) 本站查看
3. 陈柯宇, 陈科宇, 秦怡. 自动钻机动力头转速控制优化策略. 矿山机械. 2025(06) 百度学术
4. 陈韬, 张幼振, 钟自成. 基于钻孔钻进过程数据驱动的地层可钻性预测方法. 煤炭工程. 2025(05) 百度学术
5. 王清峰,刘洋,陈航,史书翰,崔小超. 煤矿井下钻进工况参数智能控制技术发展与展望. 矿业安全与环保. 2025(01): 20-29 . 百度学术
6. 陈科宇. 矿用钻孔机器人快速自适应接扣技术研究. 矿山机械. 2025(05): 1-4 . 百度学术
7. 马涛,张超,王巍,魏佳,刘贤玉. 涠西南凹陷基于机械比能的钻头磨损评价方法. 中国石油和化工标准与质量. 2024(01): 4-6 . 百度学术
8. 张能,汪川迪,安鹏,张羽,王利达,王杰. 基于PSO-BP的油气井钻速预测技术优化与仿真实验. 粘接. 2024(06): 19-22 . 百度学术
9. 唐光伟,闫政,高有山,孟宏君,王猛. 基于线性自抗扰防卡压力流量回转系统研究. 现代电子技术. 2024(22): 125-130 . 百度学术
10. 李泉新,程卓尔,方俊,牟全斌,刘飞,丛琳. 定向长钻孔瓦斯抽采负压变化规律及监测控制技术研究进展. 煤田地质与勘探. 2024(11): 171-182 . 百度学术
11. 李旺年,陆承达,张幼振,宋海涛,田盛楠,黄恒宇,陈略峰,吴敏. 基于等价输入干扰方法的钻孔机器人给进力跟踪控制. 煤田地质与勘探. 2023(09): 171-179 . 百度学术
其他类型引用(3)
 下载:
下载: