
Speed control method for belt conveyor based on improved BP-PID
-
摘要: 针对传统BP−PID控制算法采用梯度下降法求解,存在收敛速度慢、易陷入局部极值且在低信噪比(LSNR)条件下性能下降等问题,提出了一种基于改进遗传模拟退火算法(ImGSAA)优化的BP−PID带式输送机速度控制方法(ImGSAA−BP−PID)。首先将交叉、变异概率取值与迭代时间关联,并引入反余弦函数增加遗传模拟退火算法(GSAA)动态调整和非线性变化适应能力。然后通过对传统Metropolis准则进行加权处理,提出加权Metropolis准则,对新种群个体进行修正,提升GSAA的噪声稳健性。最后利用ImGSAA对BP−PID初始参数进行优化,自动确定BP−PID的最优参数组合,从而提升参数整定的实时性和控制精度及对LSNR环境的适应能力。试验结果表明:① ImGSAA仅需11次迭代即可收敛,表明利用改进的交叉、变异策略和加权Metropolis准则对GSAA进行优化,能够有效提升算法的收敛速度和实时性。② ImGSAA−BP−PID的控制误差为−0.468 5~0.572 3 m/s,与遗传算法(GA)−BP−PID、粒子群算法(PSO)−BP−PID、GSAA−BP−PID的控制方法相比,分别提升了224.88%,104.07%,38.33%。③ ImGSAA性能受LSNR影响最小,迭代15次即收敛于全局最优解,具有较强的噪声稳健性。④ 在LSNR条件下,ImGSAA−BP−PID的控制误差均值下降了3.54%,控制性能明显优于GA−BP−PID,PSO−BP−PID,GSAA−BP−PID,更满足实际工程应用需求。Abstract: The traditional BP-PID control algorithm uses the gradient descent method to solve, which has problems such as slow convergence speed, easy trapping in local extremum, and performance degradation under low signal-to-noise ratio (LSNR) conditions. In order to solve the above problems, a BP PID belt conveyor speed control method (ImGSAA-BP-PID) based on improved genetic simulated annealing algorithm (ImGSAA) optimization is proposed. Firstly, the values of crossover and mutation probabilities are correlated with the iteration time. The inverse cosine function is introduced to enhance the dynamic adjustment and nonlinear change adaptability of GSAA. Secondly, by weighting the traditional Metropolis criterion, a weighted Metropolis criterion is proposed to modify the new population individuals and improve the noise robustness of genetic simulated annealing algorithm (GSAA). Finally, ImGSAA is used to optimize the initial parameters of BP-PID, automatically determining the optimal parameter combination for BP-PID. It improves its real-time parameter tuning, control precision, and adaptability to the LSNR environment. The experimental results show the following points. ① ImGSAA only needs 11 iterations to converge, indicating that optimizing the GSAA using the proposed improved crossover and mutation strategies and weighted Metropolis criteria can effectively improve the convergence speed and real-time performance of the algorithm. ② The control error of ImGSAA-BP-PID is −0.468 5-0.572 3 m/s, which is 224.88%, 104.07%, and 38.33% higher than the control methods based on genetic algorithm (GA)-BP PID, particle swarm optimization (PSO)-BP PID, and GSAA-BP-PID, respectively. ③ The performance of ImGSAA is least affected by LSNR. It converges to the global optimal solution after 15 iterations, which has strong noise robustness. ④ Under LSNR conditions, the average control error of ImGSAA-BP-PID decreases by 3.54%. The control performance is significantly better than GA-BP-PID, PSO-BP-PID, and GSAA-BP-PID, which better meets the practical engineering application requirements.
-
0. 引言
带式输送机是煤矿开采中主要连续运输设备,具有输送量大、输送距离远和输送费用低等优点。由于煤矿开采的不连续性,带式输送机经常处于空载、轻载等运行状态,造成带式输送机速度控制难度较大。同时由于带式输送机通常以串联方式运输,运行过程中振动、抖动等都会引入速度测量噪声,使带式输送机速度控制处于低信噪比(Low Signal to Noise Ratio, LSNR)条件,进一步增加了速度控制难度[1-5]。
比例−积分−微分(Proportional Integral Derivative, PID)控制器结构简单,容易实现,被广泛应用于当前自动化生产中[6-8]。反向传播(Back Propagation, BP)神经网络具有较强的自适应学习和任意非线性函数逼近能力,鲁棒性高且支持并行计算。因此,神经网络PID常常应用于带式输送机速度控制领域[9-11]。文献[12]针对带式输送机非线性、强耦合特点,将模糊理论与PID控制相结合,提出了一种模糊PID调速控制系统,提高了PID的自适应能力。文献[13]针对煤矿开采过程中带式输送机速度控制进行研究,利用BP−PID控制器进行自适应调速,提高了系统控制精度。文献[14]针对带式输送机运输距离长、能耗大的问题,提出了一种径向基函数(Radial Basis Function,RBF)神经网络PID(RBF−PID)控制器,自动实现速度控制,降低了系统能耗。文献[15]将遗传算法(Genetic Algorithm, GA)引入BP−PID,建立了GA−BP−PID模型,利用GA的全局寻优能力对BP−PID模型参数进行优化,提升控制性能。文献[16]提出了一种基于粒子群算法(Particle Swarm Optimization, PSO)的BP−PID参数优化法,能够有效降低控制算法的超调量。
上述研究从提升带式输送机速度控制精度、降低能耗方面对控制方法进行了优化,但没有考虑当系统处于复杂工作环境时所面对的LSNR条件及实际工程应用中对控制算法实时性的要求。为了提升BP−PID的控制实时性以及在LSNR条件下的控制性能,本文将遗传模拟退火算法(Genetic Simulated Annealing Algorithm, GSAA)引入BP−PID,提出一种改进的GSAA(Improved GSAA, ImGSAA)优化的BP−PID带式输送机速度控制方法。从增加动态调整能力和非线性变化适应能力2个方面改进GSAA,建立ImGSAA,进而利用ImGSAA对BP−PID进行优化,提升参数整定的实时性和控制精度及对LSNR条件的适应能力。
1. GSAA改进
GSAA将GA[17]的全局搜索能力与模拟退火算法(Simulate Anneal Algorithm, SAA)[18-19]的局部搜索能力相结合,通过优势互补获得更加均衡的参数优化能力。GSAA以GA为基本框架,将SAA的退火操作融入GA的遗传过程。首先,对GA的种群规模、交叉概率和变异概率、最大迭代次数及SAA的初始温度、退火系数等进行初始化。其次,计算每个种群个体的适应度函数,并选择种群中适应度函数值较大的优秀个体进行GA的交叉和变异,从而产生新的个体。再次,对新个体进行SAA操作,根据Metropolis准则判断是否接受新个体,将所有满足条件的新个体构成新种群。最后,计算当前个体的适应度函数值,并判断当前个体是否满足最大迭代条件,若满足则输出最优解,算法终止,否则继续进行迭代。
考虑到工程实践中BP−PID面对的LSNR条件,对GSAA进行适应性改进,得到ImGSAA,以提升LSNR条件下算法的噪声稳健性和实时性。
1.1 交叉概率和变异概率改进
传统GSAA中,交叉概率
$ {p_{\rm{c}}} $ 和变异概率$ {p_{\rm{m}}} $ 是决定算法寻优能力的关键因素,其中$ {p_{\rm{c}}} $ 代表种群的多样性,$ {p_{\rm{m}}} $ 代表种群能够跳出局部最优解的可能性,因此选择合适的$ {p_{\rm{c}}} $ 和$ {p_{\rm{m}}} $ 才能获得最优性能[20]。传统GSAA根据专家经验将$ {p_{\rm{c}}} $ 和$ {p_{\rm{m}}} $ 设置为常数,但在工程实践中难以调整至最佳。因此,本文通过将$ {p_{\rm{c}}} $ 和$ {p_{\rm{m}}} $ 取值与迭代时间关联的方式,使$ {p_{\rm{c}}} $ 和$ {p_{\rm{m}}} $ 具有动态调整能力,通过引入反余弦函数,增加个体适应度的非线性变化及噪声稳健性,优化后的$ {p_{\rm{c}}} $ 和$ {p_{\rm{m}}} $ 分别为$$ {p_{\rm{c}}} = \left\{ \begin{gathered} {a_1}\dfrac{{{\text{arccos}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}} }}{{{{\text{π}} / 2}}}{\left( {1 - \dfrac{t}{T}} \right)^3}\qquad\,\,\;\; {\text{ arccos}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}} < \dfrac{{\text{π}} }{3} \\ {a_1}\left( {1 - \dfrac{{{\text{arcsin}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}} }}{{{{\text{π}} / 2}}}} \right){\left( {1 - \dfrac{t}{T}} \right)^3}\;\;{\text{ arcsin}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}} \geqslant \dfrac{{\text{π}} }{3} \end{gathered} \right. $$ (1) $$ {p_{\rm{m}}} = \left\{ \begin{gathered} {a_2}\dfrac{{{\text{arccos}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}} }}{{{{\text{π}} / 2}}}\left( {\dfrac{t}{T}} \right)\qquad\;\;\; {\text{ arccos}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}} < \dfrac{{\text{π}} }{3} \\ {a_2}\left( {1 - \dfrac{{{\text{arccos}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}} }}{{{{\text{π}} / 2}}}} \right)\left( {\dfrac{t}{T}} \right)\;\;{\text{ arccos}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}} \geqslant \dfrac{\text{π}} {3} \\ \end{gathered} \right. $$ (2) 式中:
$ {a_1} $ 和$ {a_2} $ 为自适应调整参数;$ {f_{{\rm{avg}}}} $ 和$ {f_{{\rm{max}}}} $ 分别为种群的平均适应度值和最大适应度值;$ t $ 和$ T $ 分别为当前迭代次数和最大迭代次数。从式(1)和式(2)可看出:在迭代初期,当前迭代次数远远小于最大迭代次数,种群的平均适应度值
${f_{{\rm{avg}}}}$ 距离最大适应度值${f_{{\rm{max}}}}$ 较远,即${\text{arccos}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}}< \dfrac{{\text{π}} }{3}$ ,此时种群中大部分个体的适应度值较小,需要大的交叉概率$ {p_{\rm{c}}} $ 以提升种群的多样性,使个体之间充分交叉以产生优质特体,而变异概率$ {p_{\rm{m}}} $ 应尽量小,以降低破坏优良个体的概率,同时迭代初期较大的交叉概率能够提升算法的收敛速度。在迭代中后期,种群的平均适应度值${f_{{\rm{avg}}}}$ 逐渐接近最大适应度值${f_{{\rm{max}}}}$ ,即${\text{arccos}} {\dfrac{{{f_{{\rm{avg}}}}}}{{{f_{{\rm{max}}}}}}} \geqslant \dfrac{{\text{π}} }{3}$ ,此时种群中大部分个体的适应度值较大,需要减小交叉概率${p_{\rm{c}}}$ 以强化算法的局部搜索能力,采用较大变异概率${p_{\rm{m}}}$ 以提升算法跳出局部最优解的概率,从而确保算法最终收敛于全局最优解。1.2 加权Metropolis准则改进
传统GSAA采用Metropolis准则进行个体修正,修正结果要么接受新种群个体,要么保存旧种群个体,这种方式易受离群个体影响,出现种群多样性不足、对噪声敏感等问题。ImGSAA根据新旧种群中个体进化程度不同,对Metropolis准则进行改进,分情况对新种群中的个体进行修正。改进后的加权Metropolis准则根据新旧种群个体的进化程度,利用加权比例系数按不同比例接收新旧种群的基因信息,增加种群个体的多样性及算法的噪声稳健性。
1) 加权比例系数为
$$ \kappa = {\rm{exp}}\left( { - \frac{{E\left( {{x_{{\rm{new}}}}} \right) - E\left( {{x_{{\rm{old}}}}} \right)}}{{\gamma R}}} \right) $$ (3) 式中:
$ \gamma $ 为玻尔兹曼常数;$ E\left( \cdot \right) $ 为求括号内变量在温度为R时的适应度函数值,由于一般带式输送机工作环境适应温度为−20 ~+50 ℃,所以$R \in $ [−20, 50];$ {x_{{\rm{new}}}} $ 和$ {x_{{\rm{old}}}} $ 分别为新旧种群中对应的个体。2) 当新种群中个体的适应度值大于旧种群中对应个体的适应度值,即
$ E\left( {{x_{{\rm{new}}}}} \right)>E\left( {{x_{{\rm{old}}}}} \right) $ 时,下一代种群个体为$$ {x_{{\rm{next}}}} = \kappa {x_{{\rm{new}}}} + \left( {1 - \kappa } \right){x_{{\rm{old}}}} $$ (4) 3) 当
$E\left( {{x_{{\rm{new}}}}} \right)> E\left( {{x_{{\rm{old}}}}} \right)$ 时,表明新种群个体的基因比旧种群个体基因更适合当前温度,此时$ \kappa $ 的取值接近1,即下一代种群的基因以新种群基因为主,旧种群基因为辅。当$E\left( {{x_{{\rm{new}}}}} \right) \leqslant E\left( {{x_{{\rm{old}}}}} \right)$ 时,$ \kappa $ 的取值较小,即下一代种群的基因以旧种群基因为主,新种群基因为辅。2. ImGSAA−BP−PID
2.1 BP−PID
传统PID在系统控制过程中,比例(
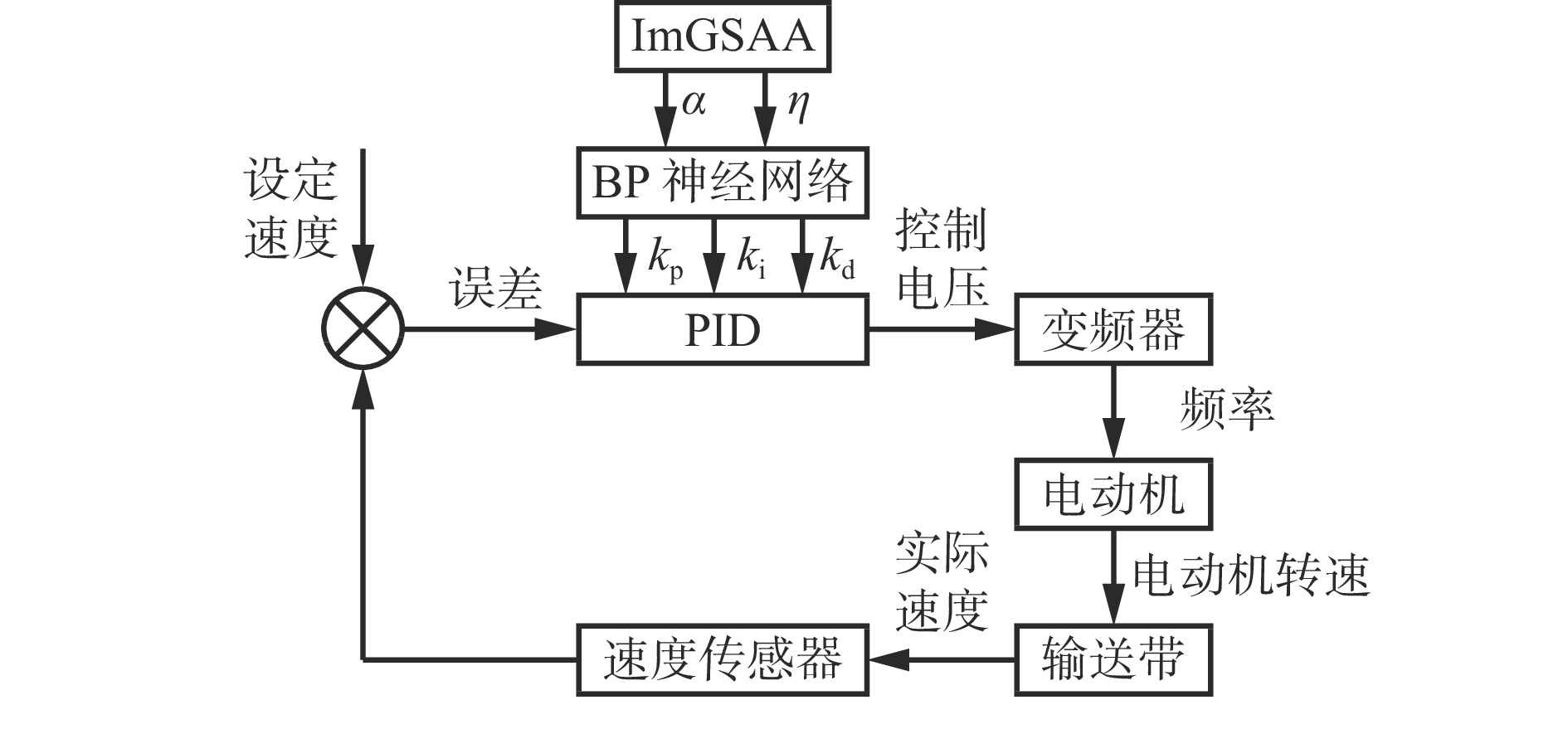
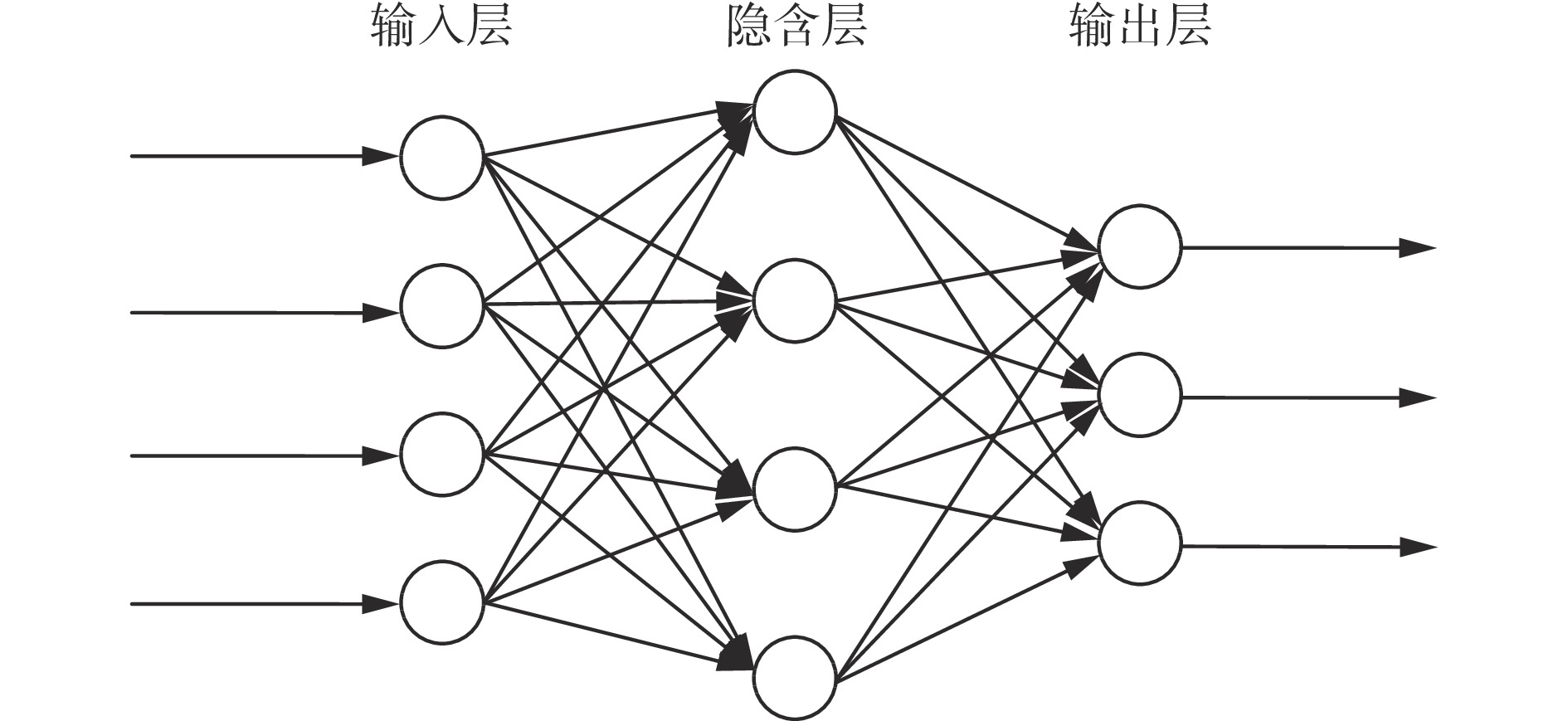
$ {k_{\rm{p}}} $ )、积分($ {k_{\rm{i}}} $ )、微分($ {k_{\rm{d}}} $ )3个参数固定不变,无法实时在线调整。而BP神经网络具备较强的自学习能力,能够根据当前控制系统的运行状态,对参数进行自适应整定,从而提升系统的控制性能。BP 神经网络由输入层神经元、隐含层神经元和输出层神经元组成,如图1所示。对于给定的输入神经元
$ o_j^{\left( 1 \right)} $ ($j = 1,2, \cdots ,M $ ,M为输入神经元总数),隐含层的输入$ c_l^{\left( 2 \right)} $ ($l = 1,2, \cdots ,L $ ,L为隐含层输入神经元总数)和输出$O_h^{\left( 3 \right)}$ ($h = 1,2, \cdots ,I $ ,I为隐含层输出神经元总数)为$$ \left\{ \begin{gathered} c_l^{\left( 2 \right)}\left( b \right) = \sum\limits_{j = 1}^M {w_{hj}^{\left( 2 \right)}o_j^{\left( 1 \right)}} \\ O_h^{\left( 3 \right)}\left( b \right) = m\left( {c_l^{\left( 2 \right)}\left( b \right)} \right) \\ \end{gathered} \right. $$ (5) 式中:
$ w_{hj}^{\left( 2 \right)} $ 为网络输入层到隐含层的加权系数;$m\left( \cdot \right)$ 为激活函数;b为当前迭代次数。输出层神经元的输入和输出为
$$ \left\{ \begin{gathered} c_h^{\left( 3 \right)}\left( b \right) = \sum\limits_{l = 1}^L {w_{hl}^{\left( 3 \right)}O_l^{\left( 2 \right)}} \\ O_1^{\left( 3 \right)}\left( b \right) = {k_{\rm{p}}}\left( b \right) = g\left( {c_1^{\left( 3 \right)}\left( b \right)} \right) \\ O_2^{\left( 3 \right)}\left( b \right) = {k_{\rm{i}}}\left( b \right) = g\left( {c_2^{\left( 3 \right)}\left( b \right)} \right) \\ O_3^{\left( 3 \right)}\left( b \right) = {k_{\rm{d}}}\left( b \right) = g\left( {c_3^{\left( 3 \right)}\left( b \right)} \right) \\ \end{gathered} \right. $$ (6) 式中:
$c_h^{\left( 3 \right)} $ 为网络输出层神经元的输入变量;${w_{hl}^{\left( 3 \right)}}$ 为隐含层到输出层的加权系数;$ O_1^{\left( 3 \right)} $ ,$ O_2^{\left( 3 \right)} $ ,$ O_3^{\left( 3 \right)} $ 为输出变量,对应PID的3个控制参数;$g(\cdot) $ 为活化函数。采用系统预期输出与实际输出之间的均方误差作为代价函数。
$$ e\left( b \right) = \frac{1}{2}{\left( {u\left( b \right) - y\left( b \right)} \right)^2} $$ (7) 式中:
$ e\left( b \right) $ 为均方误差;$ u\left( b \right) $ 为预期输出值;$ y\left( b \right) $ 为实际输出值。采用梯度下降法对BP−PID模型进行求解,得到加权系数
$ w_{lj}^{\left( 2 \right)} $ 和$ w_{hl}^{\left( 3 \right)} $ 的更新公式[14]。$$ \left\{ \begin{gathered} \Delta w_{lj}^{\left( 2 \right)}\left( b \right) = \alpha \Delta w_{lj}^{\left( 2 \right)}\left( {b - 1} \right) + \eta \delta _l^{\left( 2 \right)}O_h^{\left( 3 \right)}\left( b \right) \\ \Delta w_{hl}^{\left( 3 \right)}\left( b \right) = \alpha \Delta w_{hl}^{\left( 3 \right)}\left( {b - 1} \right) + \eta \delta _h^{\left( 3 \right)}O_h^{\left( 3 \right)}\left( b \right) \\ \end{gathered} \right. $$ (8) 式中:
$ \alpha $ 和$ \eta $ 分别为惯性系数和学习率;$ \delta _l^{\left( 2 \right)} $ 和$ \delta _h^{\left( 3 \right)} $ 为中间变量。2.2 ImGSAA−BP−PID
由于BP−PID采用梯度下降法求解,其算法性能与惯性系数
$ \alpha $ 和学习率$ \eta $ 的初值设置密切相关[21],初值选取不当会导致算法收敛于局部最优解,且收敛速度下降,最终影响控制实时性和控制精度,所以需要对BP−PID控制器惯性系数$ \alpha $ 和学习率$ \eta $ 的初值进行优化,以提升控制性能。ImGSAA−BP−PID控制流程如图2所示。① 初始化BP神经网络结构、神经元节点数、ImGSAA种群规模、最大迭代次数、染色体长度、初始温度等,确定要优化的惯性系数
$ \alpha $ 和学习率$ \eta $ ,并计当前迭代次数$ b = 0 $ 。② 采用实数编码的方式对变量进行编码。③ 选用系统实际输出与预期输出之间的误差平方作为个体适应度函数值,并将其倒数作为目标函数。④ 根据每个个体适应度值的大小采用传统轮盘赌方法对个体进行选择,淘汰适应度值较小的个体;根据交叉概率对配对染色体进行相互交换操作,以提升种群的多样性;根据变异概率进行变异操作以产生新的个体,从而确保算法能够跳出局部解。⑤ 对新个体进行SAA操作,根据改进后的加权Metropolis准则判断是否接受新的个体,将所有满足条件的个体构成新的种群。⑥ 将新种群中最大适应度值对应的个体记为$ {V^*} $ ,并将其与旧种群中的最优个体$ V $ 进行对比,若$ {V^*}>V $ ,则用$ {V^*} $ 代替$ V $ 作为当前最优个体。⑦ 循环上述步骤,直到到达最大迭代次数。⑧ 将迭代终止时的最优个体$ {V^*} $ 解码,获取BP网络初始参数,并进行BP−PID控制。3. 仿真试验与结果分析
3.1 仿真架构
采用山西省某煤矿开采所用带式输送机调试系统记录的真实数据开展仿真试验,速度控制方法采用Matlab R2018b仿真环境开发,硬件平台为Intel Core i5处理器,主频为2.1GHz,Intel HD 515显卡芯片,8 GHz内存,64位操作系统。仿真架构如图3所示。
试验中BP神经网络设置为4−4−3结构,将ImGSAA初始种群设置为BP神经网络模型参数集
$ \left\{ {\alpha ,\eta } \right\} $ ,采用实数编码的方式,初始温度设置为100 ℃ (考虑到带式输送机工作环境适应温度为−20 ℃ ~+50 ℃,而ImGSAA需要从一个较高的初始温度出发,逐渐降低温度,直至温度满足热平衡条件,因此本文设置初始温度为100 ℃)。 最大迭代次数为200,参数取值为$ \alpha ,\eta \in \left[ {0,1} \right] $ ,迭代初始设置为$ \alpha = 1 $ ,$ \eta = 1 $ 。精确性、稳定性和实时性是评估控制性能的主要方面,因此本文选用调整时间、峰值、峰值时间、最大超调量、误差均值、误差均方根6个指标对所提ImGSAA−BP−PID方法的性能进行定量评估。
3.2 试验结果
采用GA,PSO,GSAA与ImGSAA对BP−PID模型惯性系数
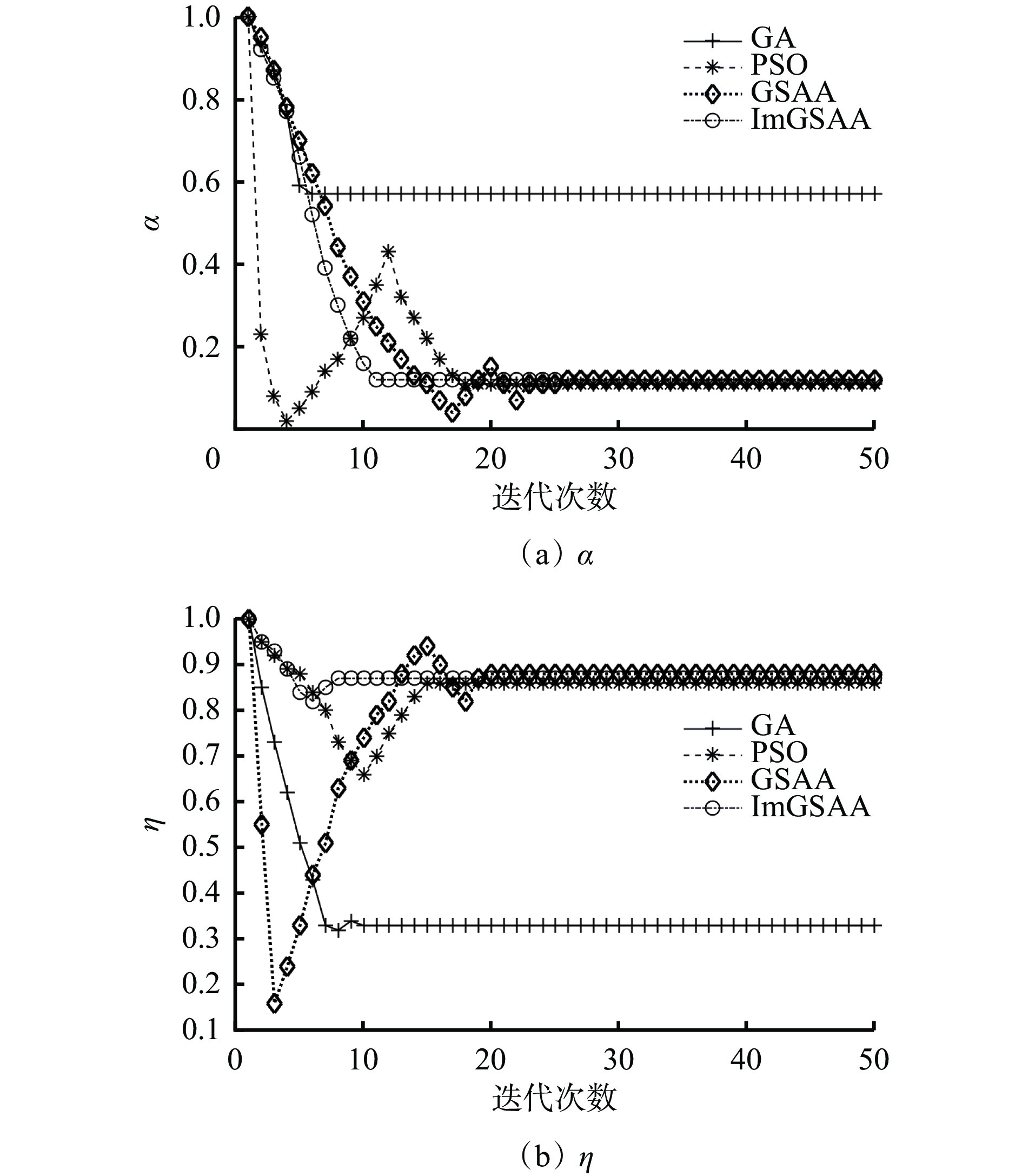
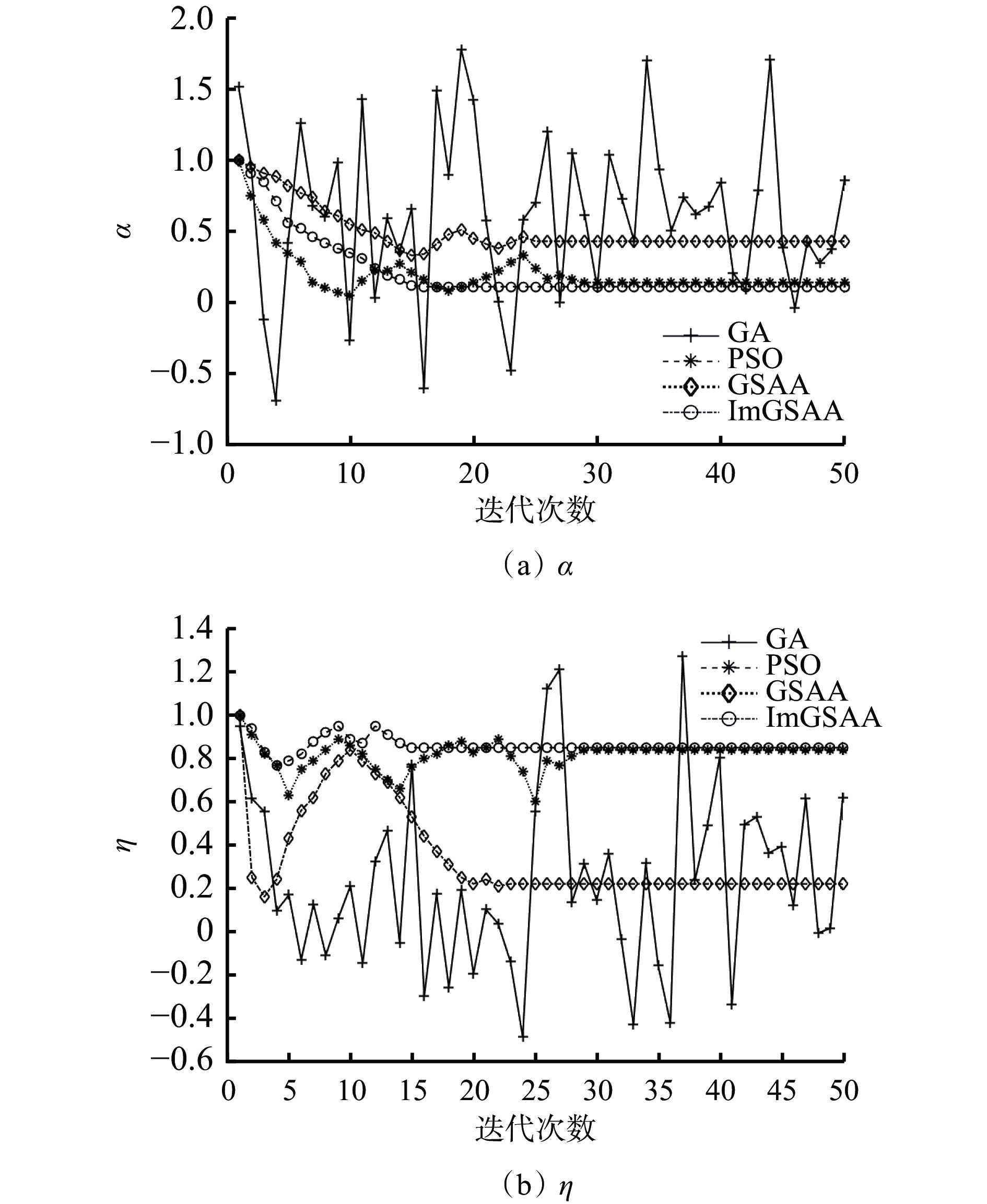
$ \alpha $ 和学习率$ \eta $ 进行优化,各算法迭代过程中参数取值变化曲线如图4所示。可看出GA经过7次迭代陷入局部极值点,权值收敛于${[\alpha ,\eta ]_{{\text{GA}}}} = [0.57,0.33]$ ,而PSO,GSAA和ImGSAA的最终收敛结果接近,分别收敛于$ {[\alpha ,\eta ]_{{\text{PSO}}}} = [0.11,0.86] $ ,${[\alpha ,\eta ]_{{\text{GSAA}}}} = [0.12,0.88]$ 和$ {[\alpha ,\eta ]_{{\text{ImGSAA}}}} = [0.12,0.87] $ ;PSO经过18次迭代实现收敛, GSAA需要22次迭代实现收敛,而ImGSAA只需11次迭代即可收敛,表明利用改进的交叉、变异策略和加权Metropolis准则对GSAA进行优化能够有效提升算法的收敛速度和实时性。![]() 图 4 各算法迭代过程中参数变化曲线Figure 4. Parameter change curve during iteration of different algorithms
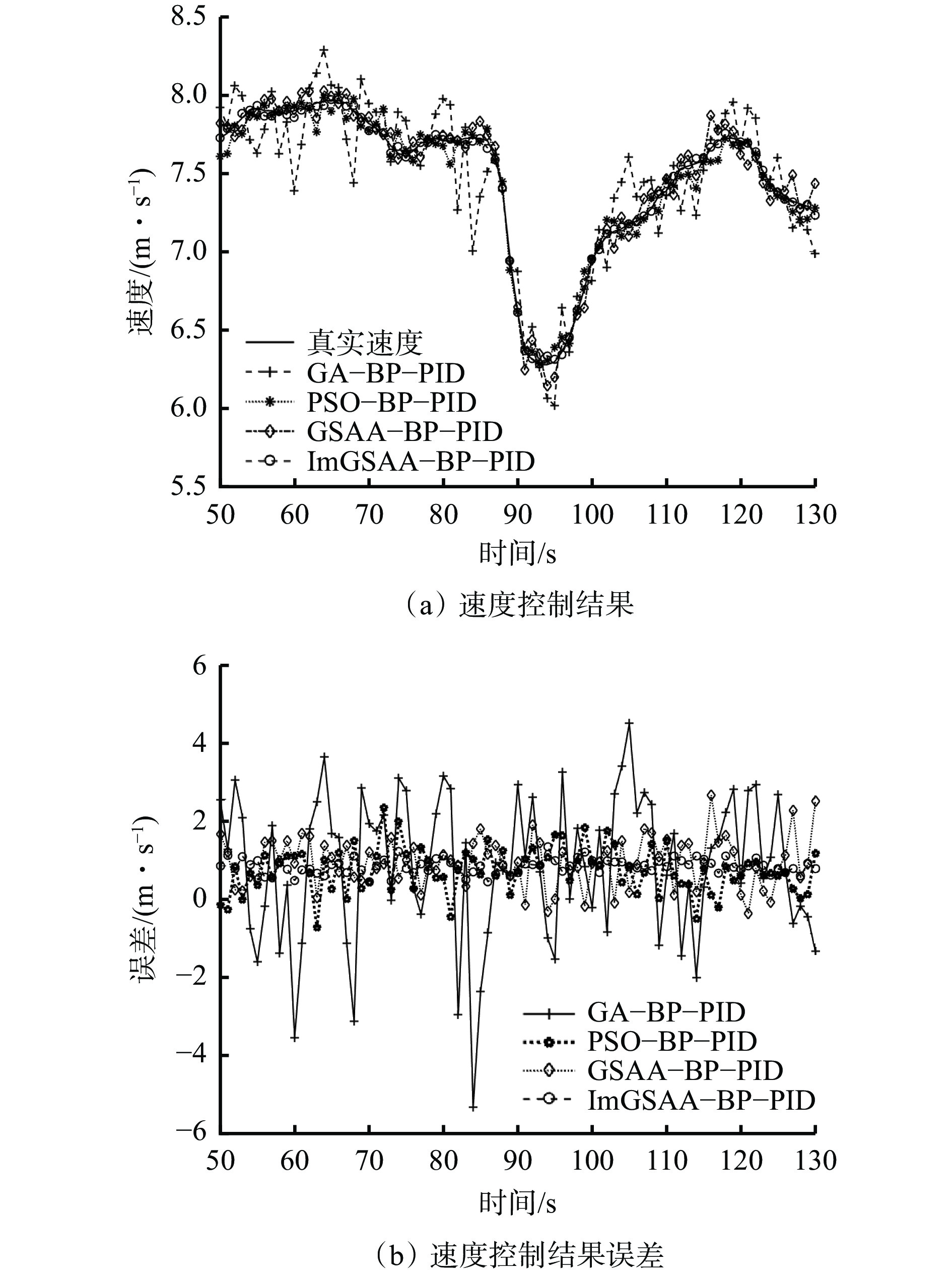
图 4 各算法迭代过程中参数变化曲线Figure 4. Parameter change curve during iteration of different algorithms采用GA−BP−PID,PSO−BP−PID,GSAA−BP−PID和ImGSAA−BP−PID 4种方法获得带式输送机速度控制结果及速度控制结果误差,如图5所示。6个指标对应的计算结果见表1。由图5和表1可看出:GA−BP−PID的控制误差较大,速度跟踪误差为−7.194 9~4.332 5 m/s,表明控制系统出现了超调量大、控制失稳等问题,这是由于GA虽然具有较强的局部搜索能力,但是全局搜索能力较弱,最终收敛于局部最优解;PSO−BP−PID的控制误差为−1.830 9~1.738 8 m/s,较GA−BP−PID的超调量低、控制精度高,但在控制稳定度方面依然落后于GSAA−BP−PID和ImGSAA−BP−PID,这是由于PSO具有较强的全局搜索能力和一定的局部搜索能力,在接近最优解时会出现振动现象,影响了控制稳定度;GSAA−BP−PID的控制误差为−1.407 8~1.356 6 m/s,其控制性能略优于PSO−BP−PID控制方法,但由于采用固定交叉、遗传概率和传统Metropolis,导致其灵活性不足,调整时间明显多于ImGSAA−BP−PID;ImGSAA−BP−PID的控制误差为−0.468 5~0.572 3 m/s,总体控制性能是4种控制方法中最优的。以控制误差均值为例,ImGSAA−BP−PID较GA−BP−PID,PSO−BP−PID,GSAA−BP−PID分别提升了224.88%,104.07%,38.33%。
表 1 4种方法控制性能指标Table 1. Control performance indexes of four methods控制方法 调整
时间/s峰值/V 峰值
时间/s最大超
调量误差均值/
(m·s−1)误差均
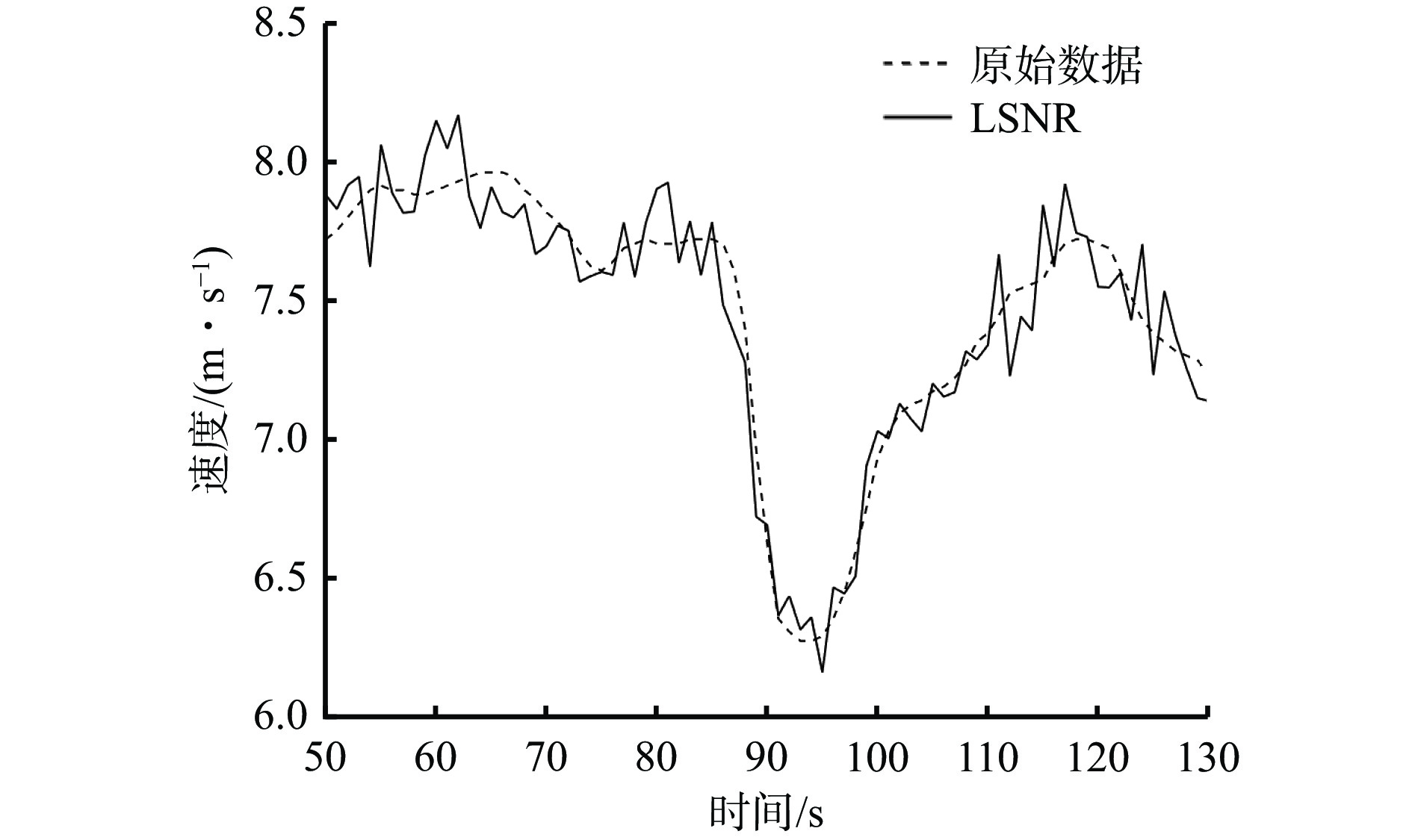
方根GA−BP−PID 0.0056 1.1382 0.031 24.56 0.3356 1.53 PSO−BP−PID 0.0033 1.0845 0.027 15.31 0.2108 0.76 GSAA−BP−PID 0.0020 1.0056 0.007 10.09 0.1429 0.42 ImGSAA−BP−PID 0.0016 1.0073 0.006 7.11 0.1033 0.25 向实测数据加入高斯白噪声,构建LSNR测试数据,速度变化曲线如图6所示。可看出在LSNR(SNR=0)条件下,由于受到噪声污染,速度曲线出现了较明显的波动,在这种情况下,要想实现高精度的速度控制难度更大。
在LSNR条件下,采用GA,PSO,GSAA和ImGSAA 4种算法对BP−PID模型初值进行优化,参数取值随迭代次数的变化曲线如图7所示。可看出在LSNR条件下,GA经过50次迭代仍然没有收敛;而GSAA最终收敛于局部最优解
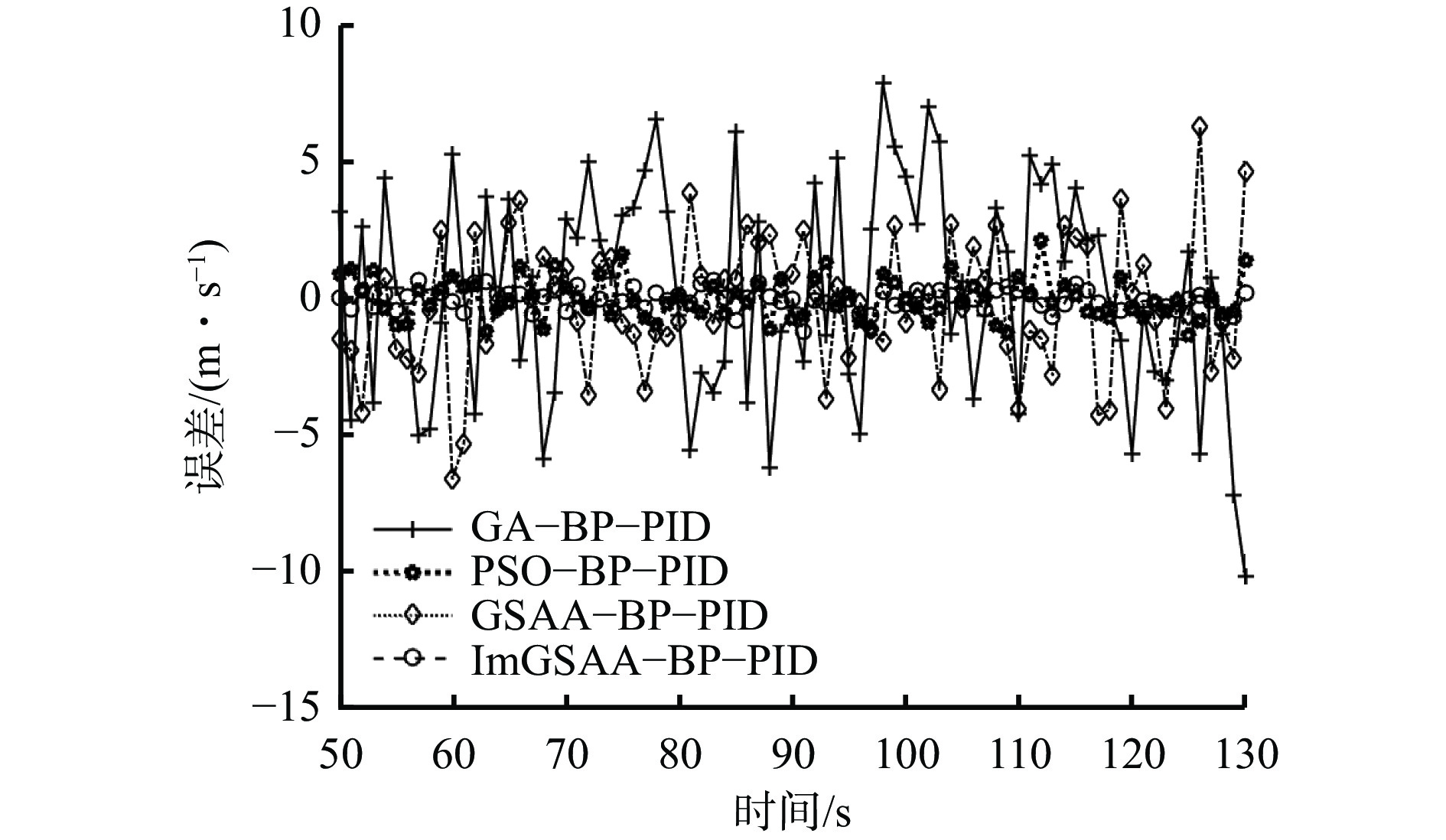
${[\alpha ,\eta ]_{{\text{GSAA}}}} = [0.43,0.22]$ ;PSO虽然能够收敛于全局最优解,但是其收敛速度出现了明显下降,需要迭代29次才实现收敛,最终收敛于$ {[\alpha ,\eta ]_{{\text{PSO}}}} = [0.14,0.83] $ ;ImGSAA性能受LSNR影响最小,迭代15次即收敛于全局最优解,最终收敛于$ {[\alpha ,\eta ]_{{\text{ImGSAA}}}} = [0.11,0.85] $ ,验证了ImGSAA算法的噪声稳健性。为验证ImGSAA−BP−PID方法在LSNR条件下控制性能,在SNR=0条件下,4种方法的速度控制误差曲线如图8所示。可看出GA−BP−PID,PSO−BP−PID,GSAA−BP−PID,ImGSAA−BP−PID的控制误差分别为−12.811 8~10.861 5,−1.901 3~2.614 6,−5.860 1~6.914 1,−0.948 5~1.138 3 m/s。说明ImGSAA−BP−PID在LSNR条件下的控制性能较优。
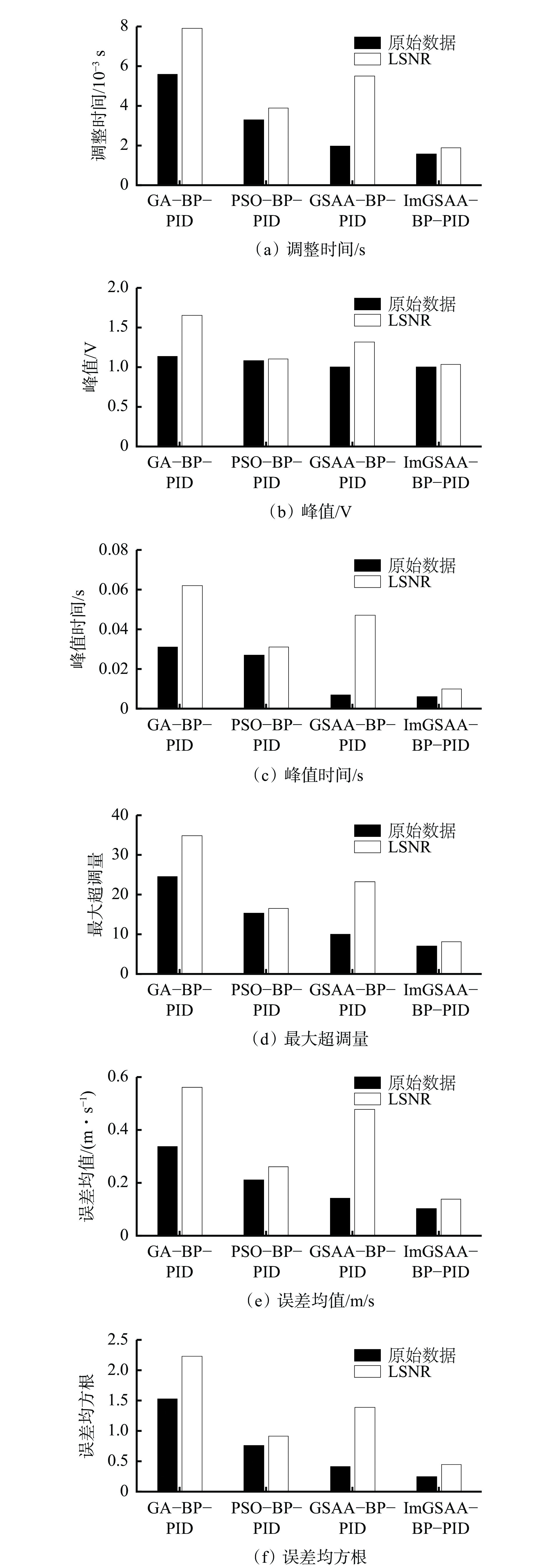
4种调速方法在原始数据和LSNR条件下性能差异如图9所示。对应的评价指标计算结果见表2。可看出在LSNR条件下,4种方法的控制性能均出现了不同程度下降:GSAA由于最终收敛于局部最优解,其性能下降最大。以控制误差均值为例,GSAA的控制误差均值较原始数据下降超过33.26%;PSO−BP−PID在LSNR条件下控制误差均值下降了8.02%;ImGSAA−BP−PID具有较强的噪声稳健性,在LSNR条件下控制误差均值下降了3.54%,控制性能明显优于其他3种方法的控制误差均值。
表 2 LSNR条件下4种方法控制性能指标Table 2. Control performance indexes of four methods under LSNR调速方法 调整
时间/s峰值/V 峰值
时间/s最大超
调量误差均值/
(m·s−1)误差均
方根GA−BP−PID 0.0079 1.6578 0.062 34.77 0.5590 2.23 PSO−BP−PID 0.0039 1.1067 0.031 16.52 0.2910 0.92 GSAA−BP−PID 0.0055 1.3182 0.047 23.21 0.4755 1.39 ImGSAA−BP−PID 0.0019 1.0348 0.010 8.21 0.1387 0.45 4. 结论
1) ImGSAA仅需11次迭代即可收敛,表明利用改进的交叉、变异策略和加权Metropolis准则对GSAA进行优化,能够有效提升算法的收敛速度和实时性。
2) ImGSAA−BP−PID较GA−BP−PID,PSO−BP−PID,GSAA−BP−PID的控制误差分别提升了224.88%,104.07%,38.33%。
3) ImGSAA性能受LSNR影响最小,迭代15次即收敛于全局最优解,ImGSAA具有较强的噪声稳健性。
4) 在LSNR条件下,ImGSAA−BP−PID的控制误差均值下降了3.54%,控制性能明显优于GA−BP−PID,PSO−BP−PID,GSAA−BP−PID,更满足实际工程应用需求。
-
![]()
图 4 各算法迭代过程中参数变化曲线
Figure 4. Parameter change curve during iteration of different algorithms
表 1 4种方法控制性能指标
Table 1 Control performance indexes of four methods
控制方法 调整
时间/s峰值/V 峰值
时间/s最大超
调量误差均值/
(m·s−1)误差均
方根GA−BP−PID 0.0056 1.1382 0.031 24.56 0.3356 1.53 PSO−BP−PID 0.0033 1.0845 0.027 15.31 0.2108 0.76 GSAA−BP−PID 0.0020 1.0056 0.007 10.09 0.1429 0.42 ImGSAA−BP−PID 0.0016 1.0073 0.006 7.11 0.1033 0.25  下载: 导出CSV
下载: 导出CSV
表 2 LSNR条件下4种方法控制性能指标
Table 2 Control performance indexes of four methods under LSNR
调速方法 调整
时间/s峰值/V 峰值
时间/s最大超
调量误差均值/
(m·s−1)误差均
方根GA−BP−PID 0.0079 1.6578 0.062 34.77 0.5590 2.23 PSO−BP−PID 0.0039 1.1067 0.031 16.52 0.2910 0.92 GSAA−BP−PID 0.0055 1.3182 0.047 23.21 0.4755 1.39 ImGSAA−BP−PID 0.0019 1.0348 0.010 8.21 0.1387 0.45
下载: 导出CSV
-
[1] 方崇全. 煤矿带式输送机巡检机器人关键技术研究[J]. 煤炭科学技术,2022,50(5):263-270. FANG Chongquan. Research on key technology of inspection robot for coal mine belt conveyor[J]. Coal Science and Technology,2022,50(5):263-270.
[2] 冯俊宾. 变频调速技术在带式输送机上的节能应用[J]. 机械研究与应用,2021,34(1):142-144. FENG Junbin. Energy saving application of frequency control technology in belt conveyor[J]. Mechanical Research & Application,2021,34(1):142-144.
[3] 杨春雨,顾振,张鑫,等. 基于深度学习的带式输送机煤流量双目视觉测量[J]. 仪器仪表学报,2021,41(8):164-174. YANG Chunyu,GU Zhen,ZHANG Xin,et al. Binocular vision measurement of coal flow of belt conveyors based on deep learning[J]. Chinese Journal of Scientific Instrument,2021,41(8):164-174.
[4] 胡宗镇,赵延立. 基于改进型BP神经网络自整定的PID控制[J]. 电脑与信息技术,2019,27(1):11-13. HU Zongzhen,ZHAO Yanli. PID control based on self-adjusting BP neural network[J]. Computer and Information Technology,2019,27(1):11-13.
[5] 郭伟东,李明,亢俊明,等. 基于机器视觉的矿井输煤系统优化节能控制[J]. 工矿自动化,2020,46(10):69-75. GUO Weidong,LI Ming,KANG Junming,et al. Optimal energy saving control of mine coal transportation system based on machine vision[J]. Industry and Mine Automation,2020,46(10):69-75.
[6] WANG Guimei,LU Shenghui,LIU Jiehui,et al. Coal volume measurement of belt conveyor based on image processing[J]. Acta Metrologica Sinica,2020,41(6):724-728.
[7] 曹松青,郝万君. 基于NMPC−PID的大型风电机组独立变桨距载荷控制[J]. 计算机应用与软件,2020,37(10):34-40. CAO Songqing,HAO Wanjun. Individual pitch load control of large wind turbines based on NMPC-PID[J]. Computer Applications and Software,2020,37(10):34-40.
[8] 韩东升,杜永贵,庞宇松,等. 基于预见控制的带式输送机调速节能方法[J]. 工矿自动化,2018,44(6):64-68. HAN Dongsheng,DU Yonggui,PANG Yusong,et al. Speed regulation energy saving method of belt conveyor based on preview control[J]. Industry and Mine Automation,2018,44(6):64-68.
[9] 张文静,曹博文,刘曰锋,等. 基于分数阶滑模自适应神经网络的中速磁浮列车运行控制方法[J]. 中国铁道科学,2022,43(2):152-160. ZHANG Wenjing,CAO Bowen,LIU Yuefeng,et al. Operation control method for medium-speed maglev trains based on fractional order sliding mode adaptive neural network[J]. China Railway Science,2022,43(2):152-160.
[10] 龚桂荣. 皮带机巡检机器人控制系统设计与研究[D]. 徐州: 中国矿业大学, 2019. GONG Guirong. Design and research on an inspection robot control system for belt conveyor[D]. Xuzhou: China University of Mining and Technology, 2019.
[11] 彭月,苏芷玄,杨杰,等. 基于PSO−BP−PID单点混合悬浮球控制算法研究[J]. 铁道科学与工程学报,2022,19(6):1511-1520. PENG Yue,SU Zhixuan,YANG jie,et al. On hybrid single-point magnetic levitation ball control algorithm based on BP-PID[J]. Journal of Railway Science and Engineering,2022,19(6):1511-1520.
[12] 吉建华,苗长云,李现国,等. 基于PSO带式输送机PID控制器参数智能整定的适应度函数设计[J]. 机械工程学报,2022,58(3):1123-1129. JI Jianhua,MIAO Changyun,LI Xianguo,et al. Design of fitness function for intelligent parameter tuning of PID controller on belt conveyor with PSO[J]. Journal of Mechanical Engineering,2022,58(3):1123-1129.
[13] 王卉. 基于模糊PID理论的带式输送机调速系统设计[J]. 煤矿机械,2019,40(9):14-16. WANG Hui. Design of speed regulation system for belt conveyor based on fuzzy PID theory[J]. Coal Mine Machinery,2019,40(9):14-16.
[14] 曹江卫,魏霞. 基于RBF−PID控制器的带式输送机自适应调速系统[J]. 煤矿机械,2020,41(5):203-205. CAO Jiangwei,WEI Xia. Adaptive speed regulation system of belt conveyor based on RBF-PID controller[J]. Coal Mine Machinery,2020,41(5):203-205.
[15] 李航,杜璠,胡晓兵,等. 改进的BP神经网络PID控制器在气体浓度控制中的研究[J]. 四川大学学报(自然科学版),2020,57(6):1103-1109. LI Hang,DU Fan,HU Xiaobing,et al. Research on improved BP neural network PID controller in gas concentration control[J]. Journal of Sichuan University(Natural Science Edition),2020,57(6):1103-1109.
[16] 杨华伟,帕孜来•马合木提,张毅. PSO−BP−PID算法在双容水箱系统中的应用[J]. 电气传动,2017,47(5):78-80. YANG Huawei,PAZILAI Mahemuti,ZHANG Yi. Application of PSO-BP-PID algorithm in double tank water system[J]. Electric Drive,2017,47(5):78-80.
[17] 朱馨渝,马平. 基于改进PSO−BP神经网络的PID参数优化方法[J]. 现代电子技术,2022,45(21):127-130. ZHU Xinyu,MA Ping. PID parameter optimization method based on improved PSO-BP neural network[J]. Modern Electronics Technique,2022,45(21):127-130.
[18] SRINIVAS M,PATNAIK L M. Adaptive probabilities of crossover and mutation in genetic algorithms[J]. IEEE Transactions on Systems,Man,and Cybernetics,1994,24(4):656-667. DOI: 10.1109/21.286385
[19] GAO Chenyang, GAO Yuelin, LV Shanshan. Improved simulated annealing algorithm for flexible job shop scheduling problems[C]. Chinese Control and Decision Conference, Yinchuan, 2016: 2223-2228.
[20] WANG Zheng,WANG Bo,LIU Chun,et al. Improved BP neural network algorithm to wind power forecast[J]. The Journal of Engineering,2017(13):940-943.
[21] 郭彩杏,郭晓金,柏林江. 改进遗传模拟退火算法优化BP算法研究[J]. 小型微型计算机系统,2019,40(10):2063-2067. GUO Caixing,GUO Xiaojin,BAI Linjiang. Rsearch on improved BP algorithm for genetic simulated annealing algorithm[J]. Journal of Chinese Computer Systems,2019,40(10):2063-2067.
-
期刊类型引用(1)
1. 王凯,付志强,郝德翼,董浩. 履带式作业车行走牵引电机变速分层控制. 电子设计工程. 2025(06): 48-52 .  百度学术
百度学术
其他类型引用(3)





































































































计量
- 文章访问数: 229
- HTML全文浏览量: 70
- PDF下载量: 19
- 被引次数: 4
