
Automatic control system of auxiliary transportation traffic light based on UWB precise positioning
-
摘要: 针对当前辅助运输系统缺少有效的控制策略,车辆在路口盲区候车无序、错车困难,易发生碰撞事故,导致运输效率低的问题,设计了一种基于UWB精确定位的辅助运输交通灯自动控制系统。该系统确定了UWB定位基站在典型路口处的分布要求,设置了位置信息和行驶状态2个控制参数、多种放行机制和区间管控策略,规定了岔口的排序原则和优先级,具有自动控制、手动控制和定时切换3种控制模式。首先UWB定位基站扫描车辆定位卡数据,逻辑控制器实时读取定位基站的车辆数据信息并求解车辆的位置信息和行驶状态,控制交通灯执行控制指令,指挥运输车辆有序通行。逻辑控制器与上位机通过环网连接,上位机可下发控制指令远程变灯,逻辑控制器实时地将井下车辆的行驶数据、异常驾驶行为、交通灯状态等多种信息上传至上位机矿井车辆调度系统,实现就地控制与远程辅控相结合。在模拟巷道对该系统进行测试,结果表明:逻辑控制器代码运行正常,系统的逻辑响应时间<200 ms,交通灯状态切换的响应时间<1 s,弯道报警器能正确执行报警指令。大海则煤矿使用无轨车辆执行井下运输任务,在录车辆约140辆,运输线路不固定且运输任务繁重,重要路口流量大。该系统在环境复杂的大海则煤矿的应用结果表明,路口信息配置灵活,能够高度适配现场各个形式的路口,满足具体的路口管控需求;通过调整控制门限,系统能够调整路口控制区域的大小,适应现场运输流量的变化;定位基站采用不同的数据获取策略,降低了定位分站的铺设数量和施工成本;上位机能够实时监测井下车辆的交通调度状态,监控车辆的驾驶行为,实现了交通灯的远程管控。Abstract: The current auxiliary transportation system lacks effective control strategy. The vehicles waiting in the blind area at the intersection are disorderly. And it is difficult for one vehicle to give another the right of way. It is prone to collision accidents, resulting in low transport efficiency. This paper proposes an automatic control system of auxiliary transportation traffic light based on UWB precise positioning. The system determines the distribution requirements of UWB positioning base stations at typical intersections. The system sets two control parameters of position information and driving state, various release mechanisms and interval management and control strategies. The system specifies the sequencing principle and priority of forks. And the system has three control modes of automatic control, manual control and timing switching. Firstly, the UWB positioning base station scans the data of the vehicle positioning card. The logic controller reads the vehicle data information of the positioning base station in real time and solves the position information and the driving state of the vehicle. The logic controller controls the traffic light to execute the control command and directs the transportation vehicles to pass in an orderly manner. The logic controller is connected with an upper computer through a ring network. The upper computer can issue a control instruction to remotely change the light. And the logic controller uploads various information such as driving data, abnormal driving behaviors, traffic light states of underground vehicles to a mine vehicle dispatching system of the upper computer in real time. Therefore, the combination of local control and remote auxiliary control is realized. The system is tested in a simulated roadway. The result shows that the logic controller code operates normally. The logic response time of the system is<200 ms. The response time of the traffic light state switching is<1 s. And the curve alarm can correctly execute the alarm command. Dahaize Coal Mine uses trackless vehicles to carry out underground transportation tasks. There are about 140 recorded vehicles. The transportation lines are not fixed and the transportation tasks are intensive. The traffic at important intersections is large. The application results of the system in the complex environment of Dahaize Coal Mine show that the intersection information configuration is flexible. The system can highly adapt to various forms of intersections on-site, and meet the specific needs of intersection management and control. By adjusting the control threshold, the system can adjust the size of the intersection control area to adapt to the change of on-site transportation flow. The positioning base station adopts different data acquisition strategies, which reduces the laying quantity and construction cost of the positioning sub station. The upper computer can monitor the traffic scheduling status of underground vehicles in real time, monitor the driving behavior of vehicles, and realize the remote control of traffic lights.
-
0. 引言
煤矿辅助运输系统是煤矿产业系统化作业的重要组成部分。为了实现井下车辆、人员、物料一体化管控、监督与调度,辅助运输系统不断向新工艺、新技术靠拢,朝着实现自动化、智能化、信息化的目标持续发展[1-3]。将辅助运输系统构建成为智能辅助运输一体化管控体系是智能矿山建设的核心范畴,实现矿井车辆网络化调度管理又是构建智能辅助运输一体化管控体系的关键[4]。为了实现矿井车辆网络化调度管理,首要任务是在井下运输作业过程中充分保证交通运输的安全性。在井下运输作业过程中,采用上位机系统对井下运输进行远程控制,会造成车辆在路口盲区候车无序、错车困难,且易发生碰撞事故,导致运输效率低、运输安全得不到可靠的保障[5]。而保证安全运输的最佳手段就是设置井下交通灯就地控制系统,对复杂路段、视野盲区等区域进行交通区域管控[6]。
许多学者对井下交通灯控制系统的实现方式进行了研究。吴畏等[7]采用无线信号飞行时间定位对井下车辆进行实时定位,通过定位位置信息控制交通灯,但该系统功能较为单一,缺少完整的车辆放行机制。郭海军等[8]采用射频识别(Radio Frequency Identification,RFID)技术实现井下车辆定位跟踪,通过定位位置信息控制区间路段交通灯。该系统着重解决了狭窄巷道区间内车辆调度问题,但缺少路口控制逻辑,无法满足井下大流量的多岔路口的管控需求。佘九华等[9]提出采用位置传感器判断车辆位置,实现交通灯控制。但受井下其他物体、人员的干扰,传感器易误触发控制指令,且传感器设备安装条件较为苛刻,设备损耗度高、维护困难。且采用传感器定位的交通灯控制系统与车辆精确定位系统的结合度不高,无法实时监控每台车辆的行驶数据和驾驶行为[10-12]。
针对上述问题,本文设计了一种基于超宽带(Ultra Wide Band,UWB)精确定位的辅助运输交通灯自动控制系统。该系统通过逻辑控制器实时读取定位基站存储的车辆数据,解析成管控信息,控制交通灯执行控制指令,指挥运输车辆有序通行。逻辑控制器与上位机通过环网连接,上位机可下发控制指令远程变灯,逻辑控制器实时地将井下车辆的行驶数据、异常驾驶行为、交通灯状态等多种信息上传至上位机矿井车辆调度系统,真正实现就地控制与远程辅控相结合。
1. 定位基站的技术特征
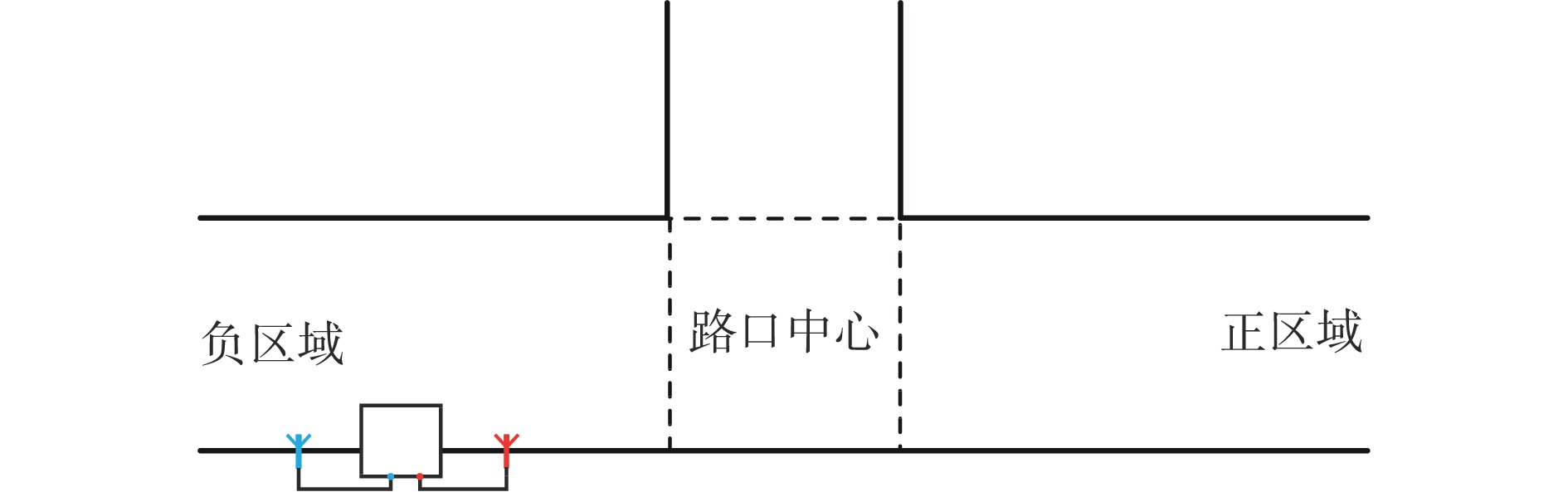
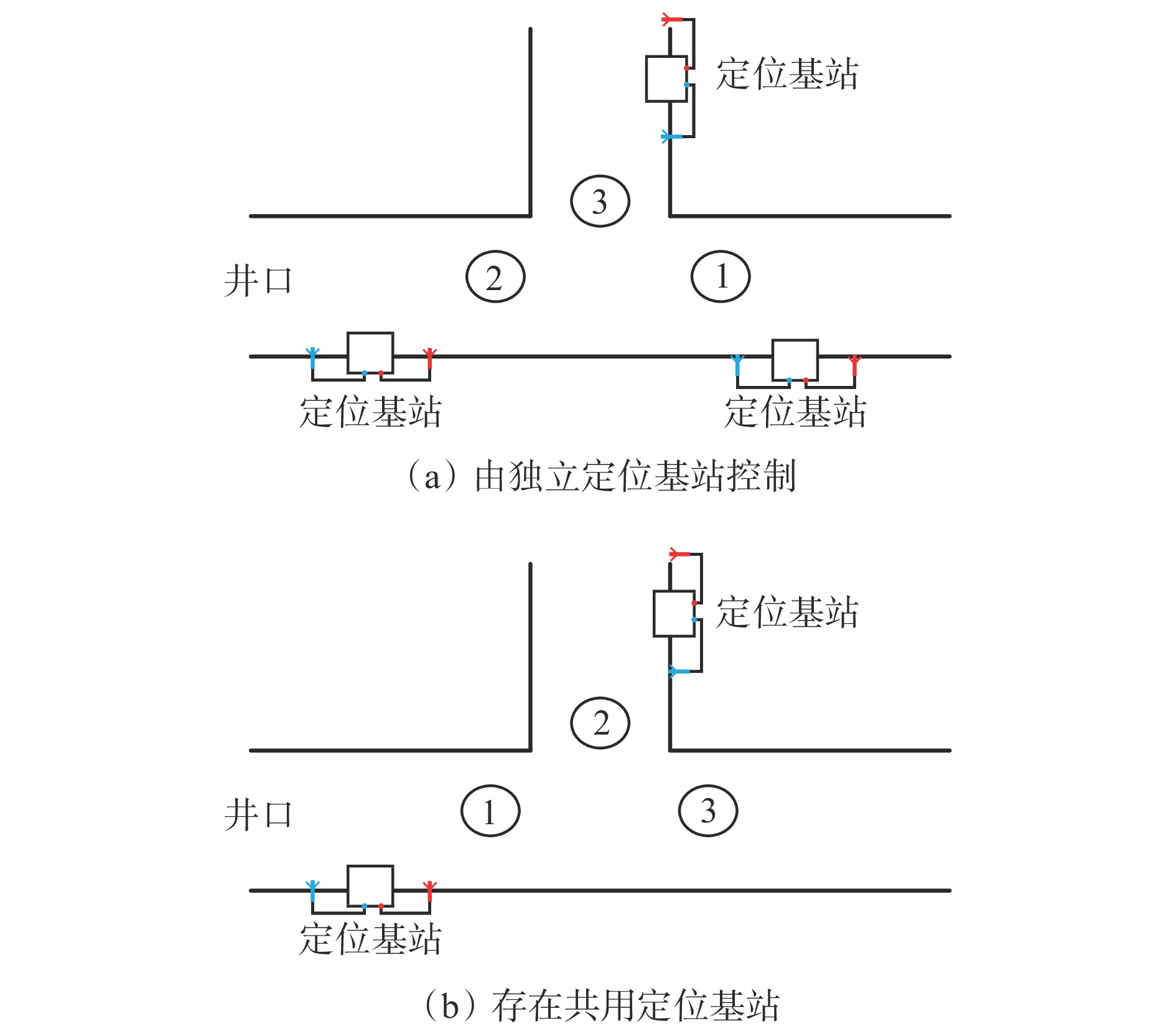
定位基站采取UWB超宽带定位技术与车辆定位卡进行数据交互,实时读取2根定位天线关于车辆定位卡的距离信息。定位基站的静态定位误差小于0.3 m,数据接收范围达400 m。在封闭的巷道中,定位基站安装正负2根全向定位天线(图1),其中红色代表正天线,安装在巷道下行方向,蓝色代表负天线,安装在巷道上行方向。
定位基站通过用户数据报协议(User Datagram Protocol,UDP)将车辆定位卡的距离信息封包存储,等待逻辑控制器主动请求定位基站传输数据报文。每一帧数据报文都包含若干条车辆数据[13]。每一条车辆数据均包含当前车辆卡号、车辆定位卡到一条定位天线的距离值和该定位天线的属性。
2. 控制系统设计
交通灯自动控制系统由定位基站、车辆定位卡、逻辑控制器、交通灯和上位机组成。定位基站获取车辆定位卡的定位数据,逻辑控制器读取定位基站获取到的车辆定位数据。在上位机上配置路口信息,并下发给逻辑控制器。逻辑控制器会根据路口信息和车辆定位卡的定位数据求解出当前路口内车辆定位卡的控制参数。逻辑控制器会根据各个车辆定位卡的控制参数执行放行控制或区域管控策略,改变交通灯的信号状态并放行车辆。交通灯的信号状态和车辆定位卡的位置信息会在上位机的图形界面中实时显示。
依据定位基站的技术特征,设计了交通灯自动控制系统的控制参数,确定了定位基站在一些典型路口处的分布要求,规定了岔口排序的原则和岔口优先级。
2.1 控制参数
车辆控制参数有位置信息与行驶状态2种,二者与车辆卡号绑定并实时更新。
首先,依据定位基站的安装位置划分路口正负区域(图2)。以路口中心为基准线,定位基站所在岔口是负区域,对向岔口是正区域。车辆在负区域时,车辆的位置信息为负;车辆在正区域时,车辆的位置信息为正。在路口中心处,车辆的位置信息为零。车辆由负区域驶向正区域时,位置信息不断增大;车辆由正区域驶向负区域时,位置信息不断减小。
2.1.1 位置信息
定位天线与车辆定位卡的距离值为一对特征值。比较定位天线与车辆定位卡距离值的大小,可实时判断车辆定位卡关于定位基站的方位,并求解出车辆与路口的位置关系
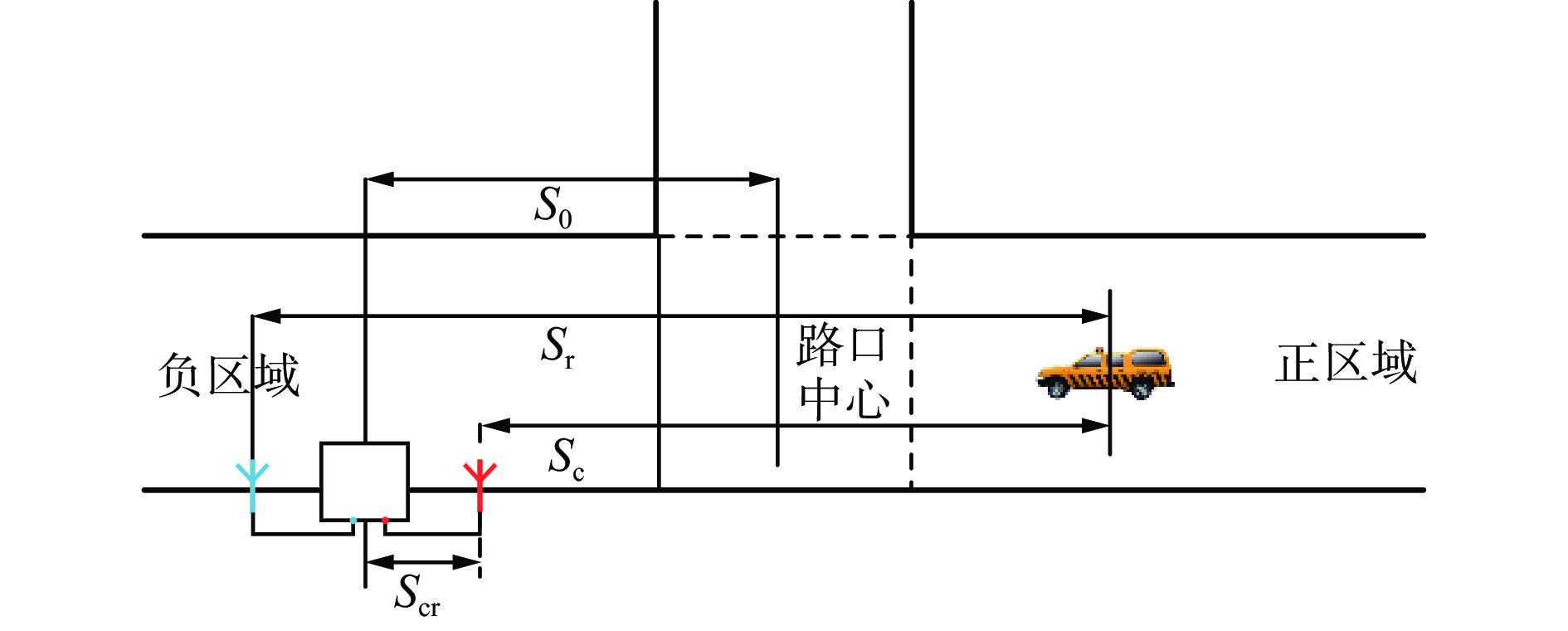
$ {S}_{{\rm{t}}} $ 。由于定位基站的天线排布存在一定自由度,正负天线相对路口的安装位置有所变化,因此,正负天线和路口的远近关系会随天线距车辆定位卡的距离改变。将距离当前路口较近的天线设为近天线,距离当前路口较远的天线设为远天线。路口位置信息如图3所示,其中距离路口较近的天线与车辆定位卡的距离数据为近天线距离
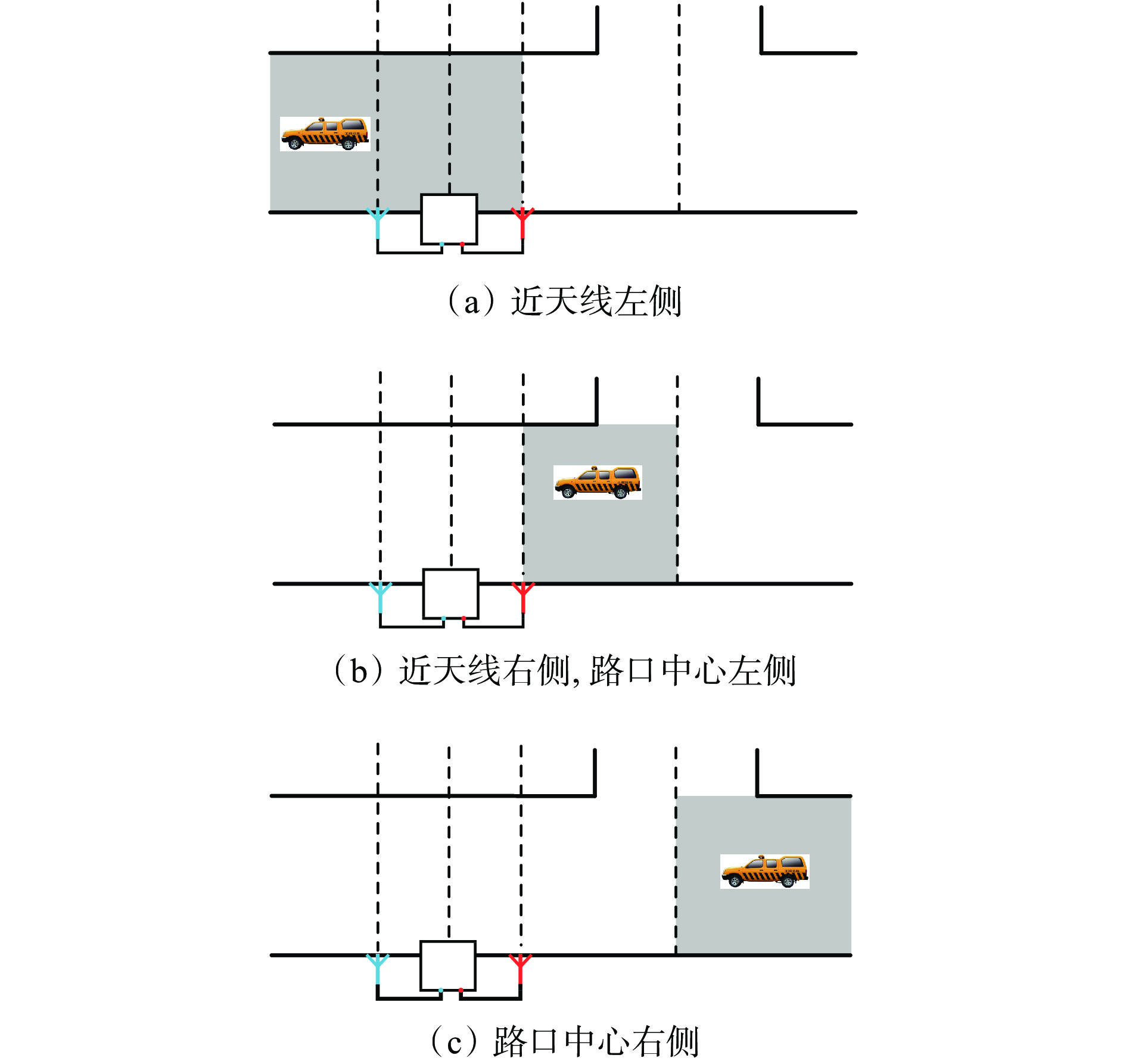
$ {S}_{{\rm{c}}} $ ,距离路口较远的天线与车辆定位卡的距离数据为远天线距离$ {S}_{{\rm{r}}} $ 。2根天线相距5 m安装,$ {S}_{{\rm{cr}}} $ 为两天线距离的一半,即2.5 m。定位基站中心到路口的距离用${S}_{{\rm{0}}}$ 表示。车辆到路口的位置信息分3种情况,如图4所示。
(1) 当车辆在定位基站近天线左侧位置区域中,车辆所处的位置存在2种情况:① 近天线到车辆的距离较远,即
${S}_{{\rm{c}}}>{S}_{{\rm{r}}}$ ;② 近天线到车辆的距离较近且远天线到车辆的距离小于2根天线之间的距离,即${S}_{{\rm{c}}}<{S}_{{\rm{r}}}$ 且${S}_{{\rm{r}}}<2{S}_{{\rm{cr}}}$ 。此时车辆到路口的距离等于近天线到路口的距离加上近天线到车辆的距离。位置关系为$$ {S}_{{\rm{t}}} =-({S}_{{\rm{0}}}-{S}_{{\rm{cr}}}+{S}_{{\rm{c}}})$$ (1) (2) 当车辆在定位基站近天线右侧、路口中心左侧位置区域中,近天线距离车辆较近且近天线到车辆的距离小于近天线到路口的距离,即
${S}_{{\rm{c}}}<{S}_{{\rm{r}}}$ 且${S}_{{\rm{0}}}-{S}_{{\rm{cr}}}>{S}_{{\rm{c}}}$ 。此时车辆到路口的距离等于近天线到路口的距离减去近天线到车辆的距离。车辆此时在负区域内。位置关系为$$ {S}_{{\rm{t}}}=-\left({S}_{{\rm{0}}}-{S}_{{\rm{cr}}}-{S}_{{\rm{c}}}\right) $$ (2) (3) 当车辆在路口中心右侧位置区域中,近天线距离车辆较近,且近天线到车辆的距离大于近天线到路口的距离,即
${S}_{{\rm{c}}}<{S}_{{\rm{r}}}$ 且${S}_{{\rm{0}}}-{S}_{{\rm{cr}}}<{S}_{{\rm{c}}}$ 。此时车辆到路口的距离等于近天线到车辆的距离减去近天线到路口的距离。车辆此时在正区域内。位置关系为$$ {S}_{{\rm{t}}}=+\left({S}_{{\rm{c}}}-{S}_{{\rm{0}}}+{S}_{{\rm{cr}}}\right) $$ (3) 2.1.2 行驶状态
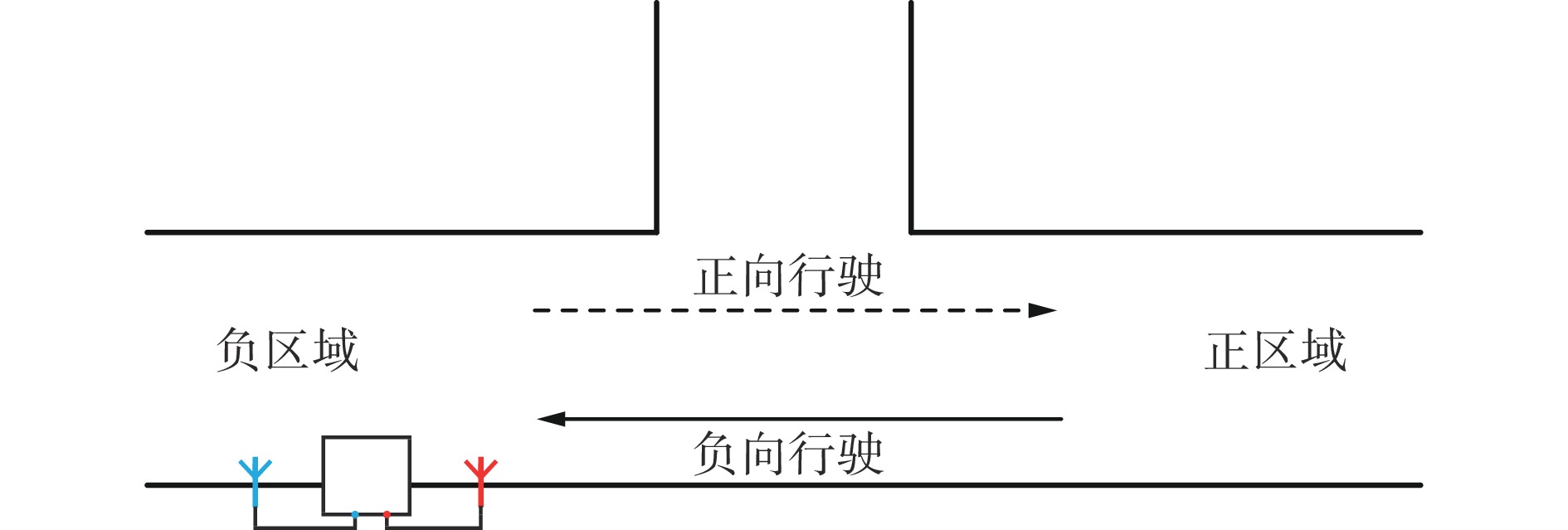
车辆的行驶状态用数值表征:“9”表示初始状态,“0”表示停止状态,“1”表示正向行驶状态,“2”表示负向行驶状态。正负向行驶状态如图5所示。
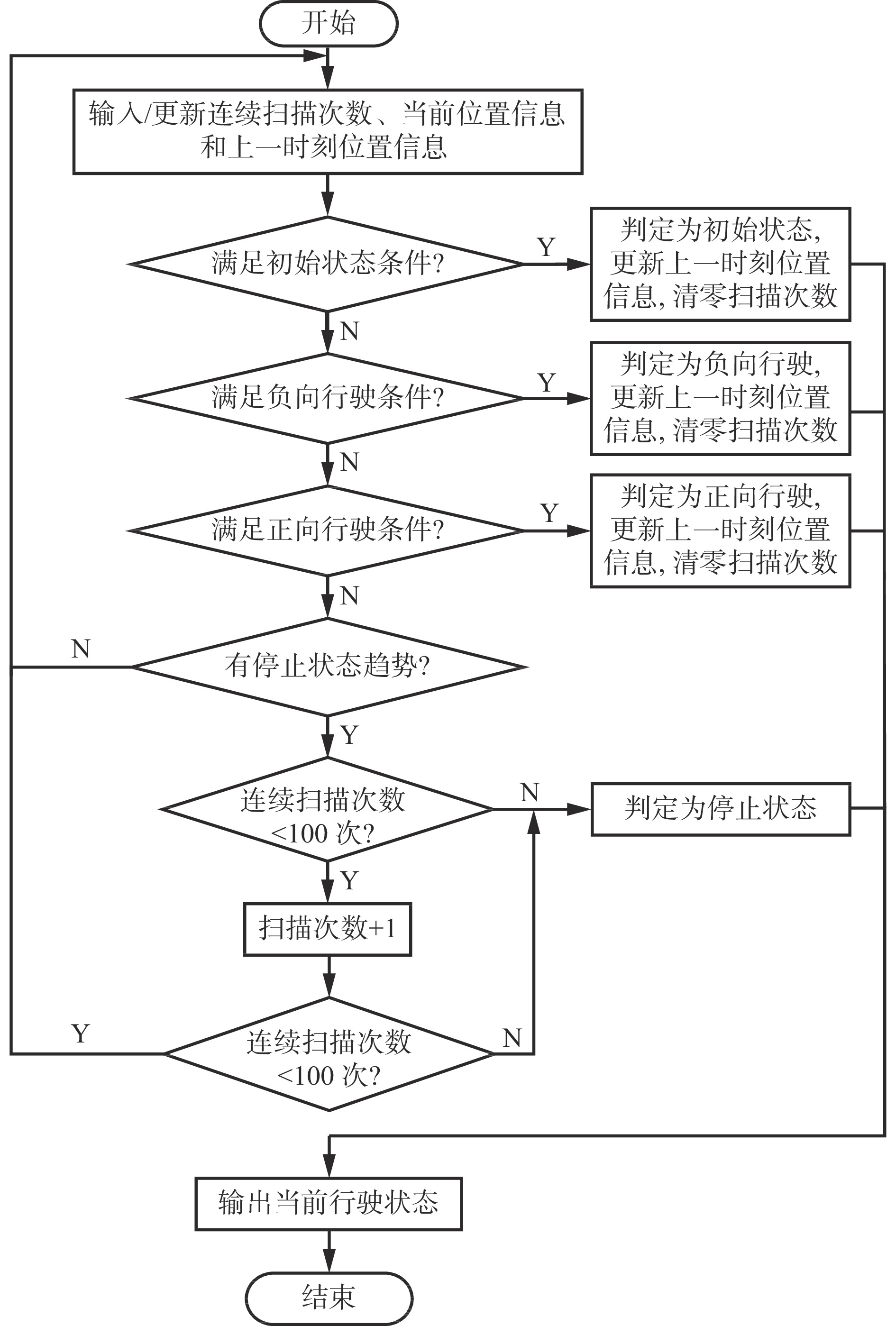
逻辑控制器通过比较当前位置信息与上一时刻位置信息,判定车辆当前的行驶状态。具体判定流程如图6所示。
每个任务周期内,逻辑控制器采集每辆车当前的行驶状态属性,包括车辆当前位置信息、上一时刻位置信息和连续扫描次数(表征车辆被连续判定为有进入停止状态趋势的次数)。若满足任一种条件(① 上一时刻位置信息为0;② 上一时刻位置信息在正区域,当前位置信息在负区域;③ 上一时刻位置信息在负区域,当前位置信息在正区域),则判定车辆进入初始状态,更新上一时刻的位置信息,并清零扫描次数。若当前位置信息减去上一时刻位置信息的差值≤−3 m,则判定车辆为负向行驶状态,更新上一时刻的位置信息,并清零扫描次数。若当前位置信息减去上一时刻位置信息的差值≥3 m,则判定车辆为正向行驶状态,更新上一时刻的位置信息,并清零扫描次数。
若不满足初始状态、负向行驶状态和正向行驶状态中的一种,则判断是否有进入停止状态的趋势。若当前位置信息与上一时刻位置信息的差值绝对值<3 m,表明车辆当前有进入停止状态的趋势。若当前连续扫描次数<100次,则将连续扫描次数加1,并跳转至下一循环。若当前连续扫描次数=100次,则判定车辆进入停止状态。此时会获取最新的行驶状态属性,并再次执行条件判断,直至输出当前行驶状态,结束当前任务周期。
2.2 定位基站的分布要求
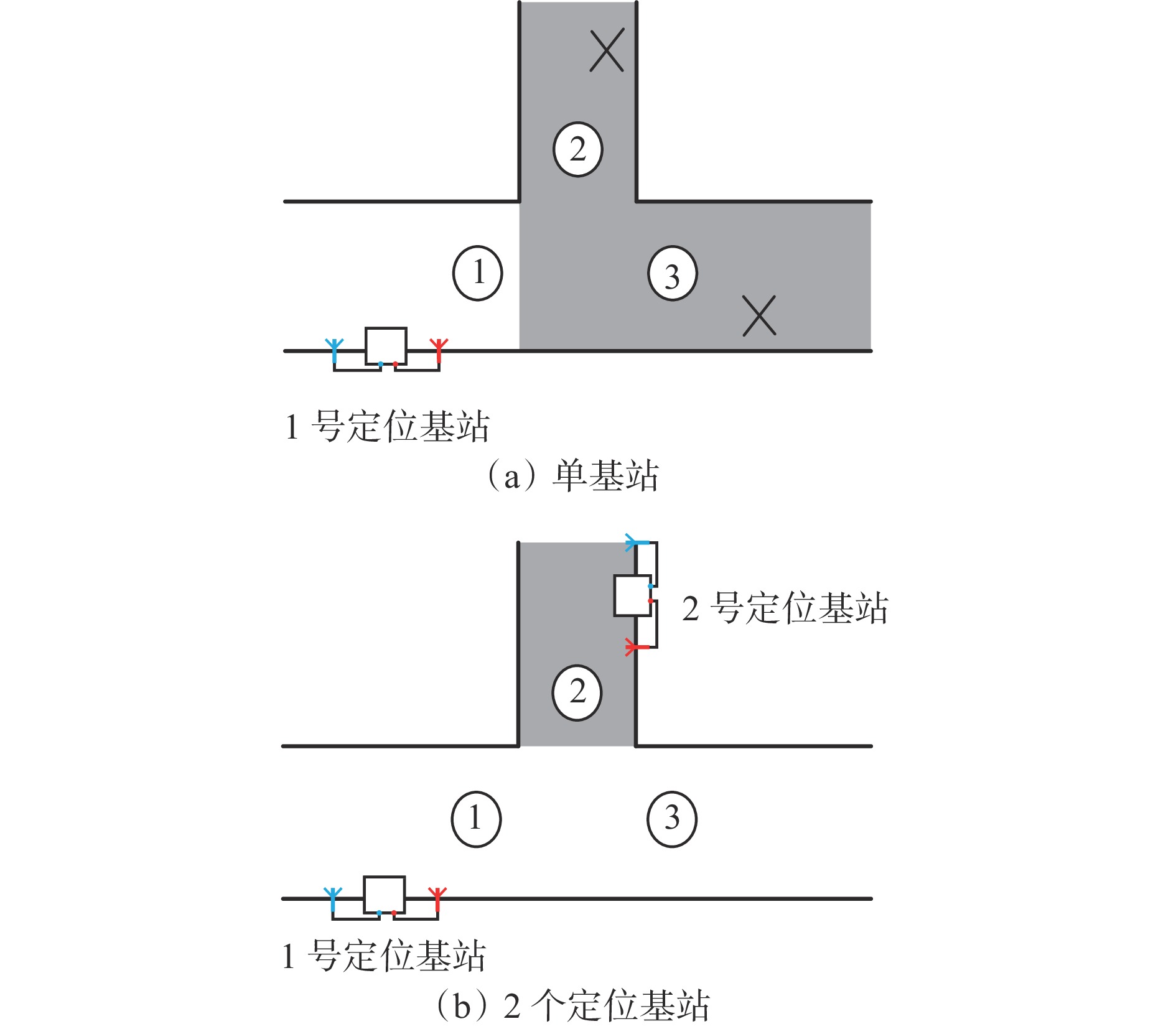
使用定位基站获取路口区域内的定位卡信息时,需要考虑全向定位天线接收信号的无向性。定位天线接收定位卡信息的无向性使得每一根定位天线都能获取路口各个方向的定位卡信息。以三岔路口为例(图7)对定位基站的分布要求进行分析。在图7(a)中,路口只安装了1号定位基站。1号定位基站能同时扫描到白色和灰色2个区域的数据,灰色区域处数据满足正天线距离<负天线距离。以灰色区域的2个标记点×为例,2处接收的定位天线的数据完全相同,导致1号定位基站无法判定车辆定位卡处于②号岔口还是③号岔口。
为了区分车辆定位卡在②号岔口还是③号岔口,需在②号岔口增加2号定位基站(图7(b))。2号定位基站所在的②号岔口为该定位基站在路口内唯一的负区域。此时路口被有效划分为4个独立的区域:①号岔口对应1号定位基站在该路口唯一的负区域;②号岔口对应2号定位基站在该路口唯一的负区域;③号岔口对应1号定位基站在该路口唯一的正区域;路口中心对应1号定位基站在该路口唯一的零区域。这样每个路口区域才能完全区分开,逻辑控制器才能执行正确的控制逻辑。
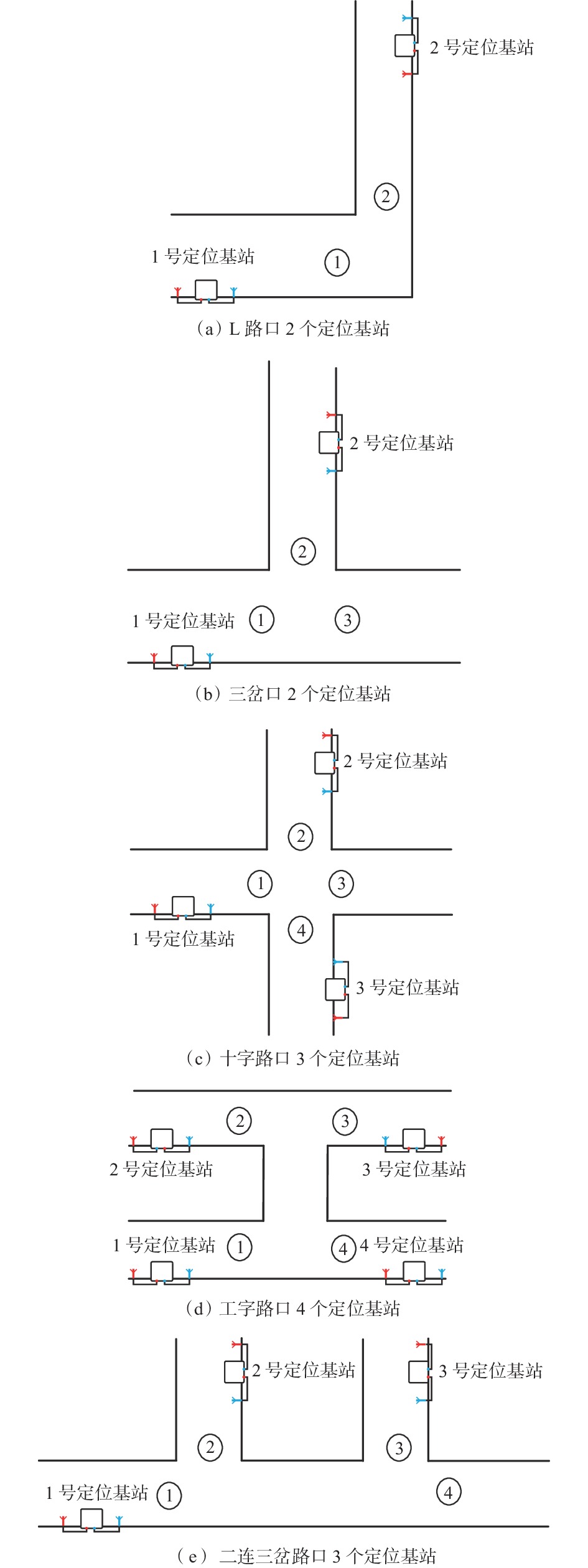
以此类推,基站数量至少应该是岔口数量减1,单路口最多只有1个基站能同时扫描2个岔口,而其他岔口必须由不同的定位基站单独扫描。将同时扫描一条直线上一组对向岔口的定位基站称为共用定位基站。共用定位基站安装地点所在的岔口是该共用定位基站的负区域,对向岔口是该共用定位基站的正区域。其他岔口内的定位基站只扫描自身的负区域。如果基站数量和岔口数量相当,那么所有定位基站都只扫描自身的负区域。依据该结论,归纳出井下5种典型路口的定位基站配置,如图8所示。
![]() 图 8 典型路口定位基站配置Figure 8. Positioning base station configurations of typical regular intersections
图 8 典型路口定位基站配置Figure 8. Positioning base station configurations of typical regular intersections2.3 区域控制门限
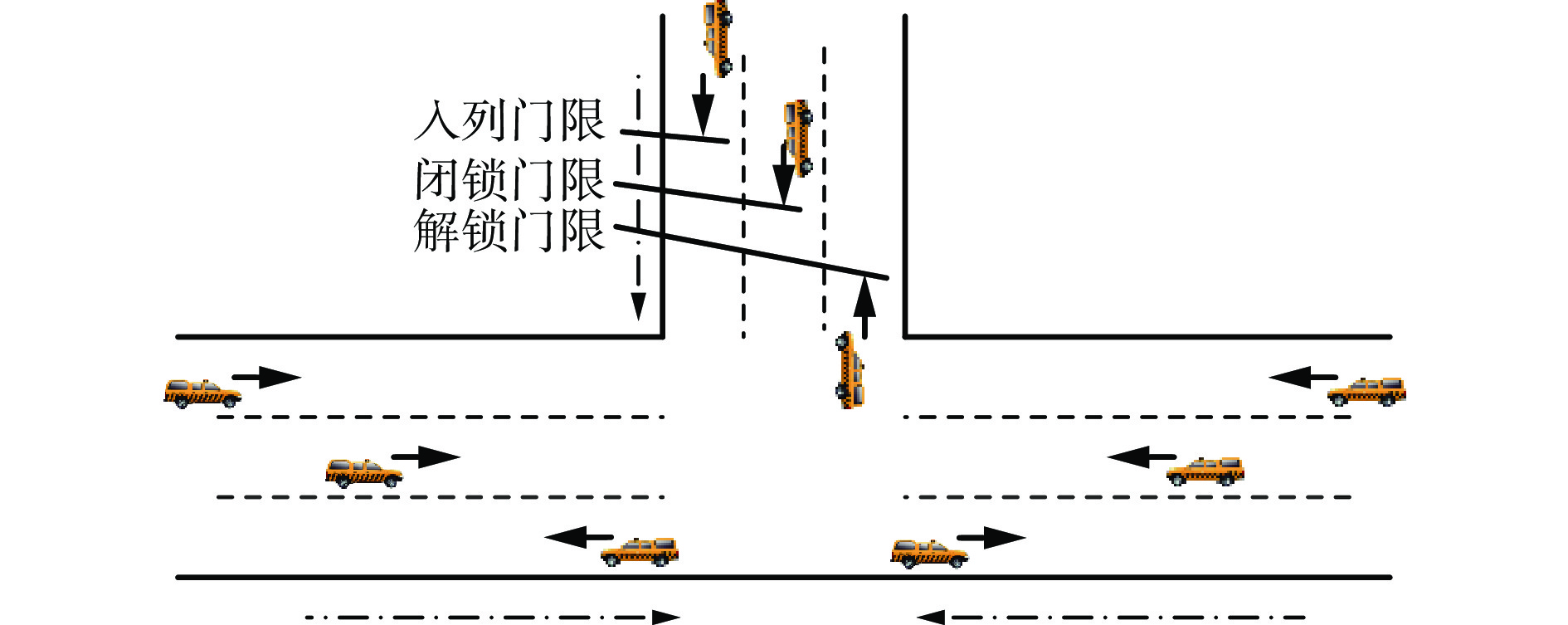
各个具体路口对控制区域的大小有不同的要求,对车辆出入路口时交通灯放行和解除放行的门限距离要求也各不相同,因此需要设置具体的区域控制门限,实现交通灯自动控制系统对区域控制门限的灵活配置。交通灯自动控制系统设置了入列门限、闭锁门限和解锁门限3个控制门限。当车辆进入路口,距离路口<入列门限,则认为该车辆已经由当前岔口驶向路口。当车辆继续行驶,距离路口<闭锁门限,则认为该车辆已经向路口中心靠近,此时需要控制交通灯发出指令,放行当前岔口车辆。当车辆驶出路口,超出解锁门限,车辆触发解锁逻辑,视为该车辆已驶离路口。设置控制门限时,入列门限、闭锁门限和解锁门限的值应依次减小。以三岔口为例,控制门限设置如图9所示。
2.4 岔口排序与优先级
在交通灯自动控制系统中,单个逻辑控制器控制单个路口。因为单个路口包含若干个岔口,所以需要对每个岔口进行排序,定义每个岔口在逻辑控制器中的序号,从而控制相应序号的交通灯。岔口的排序规则如图10所示。若当前路口的定位基站数量等于岔口数量(图10(a)),则以主巷道下行方向所在的岔口为①号岔口,顺时针方向递增,定义其他岔口的序号。若当前路口的定位基站数量等于岔口数量减1(图10(b)),存在共用定位基站。则将共用定位基站安装位置所在的那条岔口作为①号岔口,顺时针方向递增,定义其他岔口的序号。
岔口放行规则:每个岔口都设置一个入列车辆列表。如果当前岔口的入列车辆列表为空,代表该岔口内没有车等待放行。如果当前岔口内有车辆进入时,会依据先后顺序将车辆卡号排入对应岔口的入列车辆列表中。任意岔口的入列车辆列表非空时,说明该岔口内车辆需要放行。此时逻辑控制器会对需要放行的有入列车辆的岔口进行排序,得到一个待放行的岔口序号的列表。得到该列表后,会立即放行当前排在第1位的岔口。
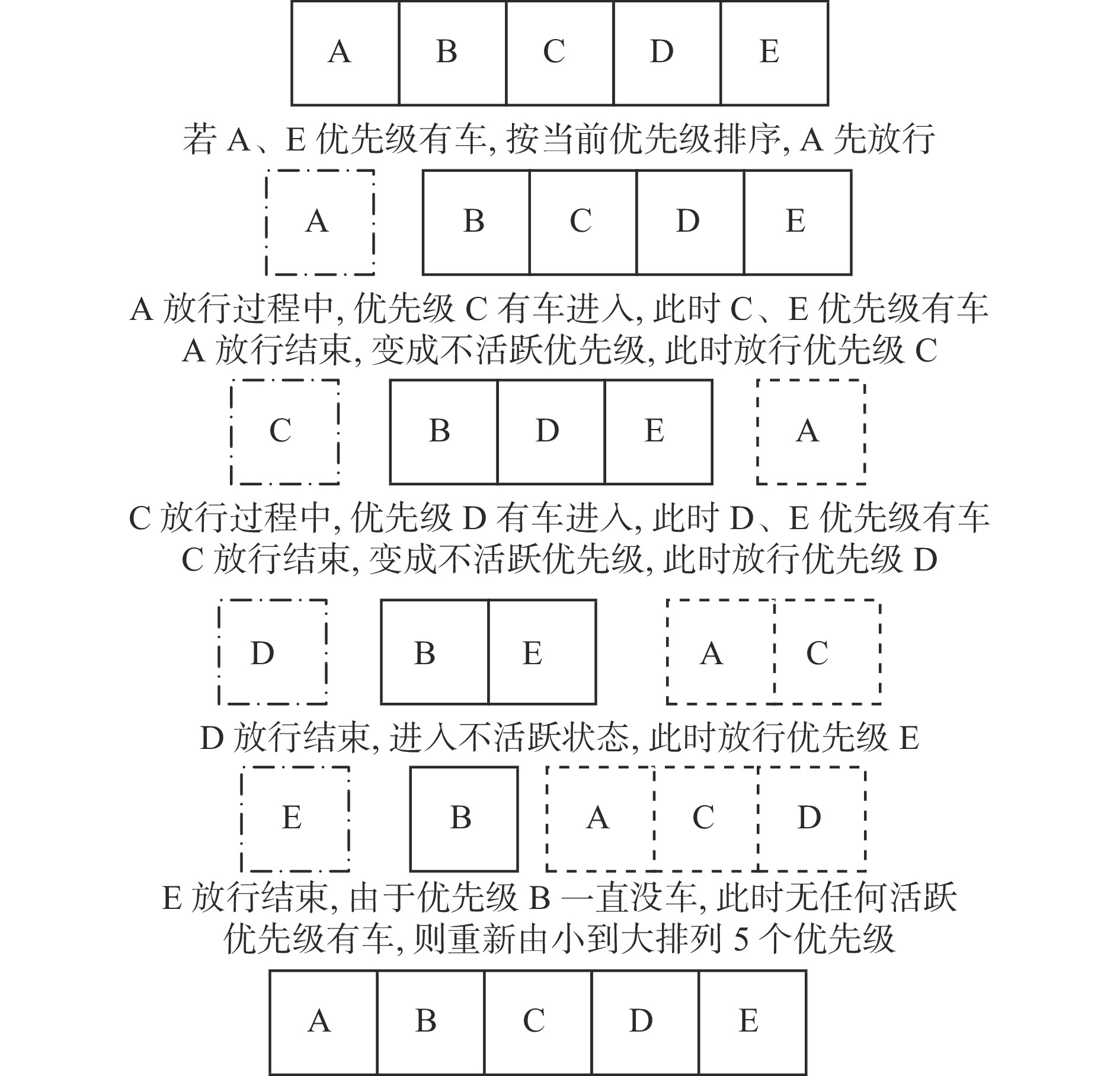
为规定岔口的优先放行次序、实现多个岔口同时放行,控制系统引入了岔口优先级。A为最高优先级,用户需逐级定义各岔口优先级,允许多个岔口优先级相同。其中首优先级表示当前正在放行的优先级,活跃优先级表示当前正在参与优先级排序的优先级,不活跃优先级表示当前优先级循环内已经放行过的优先级,且当前优先级循环内不再参与优先级排序。当岔口存在优先级时,岔口优先级排序规则如下:将活跃优先级进行排序,选有入列车辆的最高优先级作为首优先级执行放行,放行结束后,该优先级转为不活跃优先级。如果当前活跃优先级数量为零或除了不活跃优先级外的所有优先级均没有入列车辆,那么当前优先级排序循环结束。此时将所有优先级全部转为活跃状态并重新排序,选出新的首优先级执行放行。一个典型的五岔口排序循环如图11所示,所有优先级由小到大排序,实线框代表活跃优先级,点线框代表首优先级,虚线框代表非活跃优先级。
3. 软件功能与通信模块
3.1 控制模式
控制系统包括自动控制、手动控制和定时切换3种控制模式,只有当所有配置在路口的定位基站与逻辑控制器的通信正常时才能启用自动控制,定时切换和手动控制随时可以启用。
3.1.1 定时切换
定时切换的轮流放行时间不小于30 s,切换顺序由岔口序号/优先级的排序决定,相同优先级的岔口应同时放行。除了当前正在放行的岔口序号/优先级,其他岔口禁行。到达最大放行时间,切换下一个岔口序号/优先级放行。
3.1.2 手动控制
当交通灯自动控制系统处于自动控制或定时切换时,在上位机上直接修改交通灯的指示状态,交通灯自动控制系统立即进入手动控制状态。若取消交通灯的手动控制状态,则交通灯自动控制系统立即恢复自动控制或定时切换。如果手动控制执行的指令是放行路口内某一岔口,则该路口内其他岔口会自动禁行,避免多路口同时放行。
3.1.3 自动控制
系统默认为自动控制模式,规定通行时间不小于30 s。路口控制区间内无车,所有岔口交通灯亮绿灯;路口控制区间内有车,则执行自动控制的放行逻辑判断。放行逻辑判断顺序为入列判断、掉线判断、优先放行、超时放行、出列判断、闯红灯判断、列表更新、状态发布。
(1) 入列判断。根据车辆位置信息和行驶状态,及路口控制门限,判断当前岔口中入列、闭锁的车辆,更新入列车辆列表,并对岔口序号/优先级进行排序。
(2) 掉线判断。对当前正在放行的车辆启动掉线计时器。如果正在放行的车辆超过15 s无定位卡数据,则判定为掉线。如果重新获取到车辆定位卡的数据,则解除掉线状态,掉线计时器重新计时。如果放行车辆掉线超过10 s未恢复,将掉线车辆从入列车辆列表中移除。
(3) 优先放行。一个岔口放行时间超过30 s,开始判定优先放行。当入列车辆达到一定数量,立即优先放行该岔口序号/优先级。同时有多个岔口序号/优先级满足优先放行条件时,选取入列车辆最多的岔口序号/优先级放行。每个岔口序号/优先级最多可以连续执行2次优先放行。如果下次循环依然是该岔口序号/优先级满足优先放行条件,则直接跳过优先放行判断,进入超时放行判断。
(4) 超时放行。满足超时放行的条件:① 正在放行的岔口内的所有车辆均为停止状态,且超过了最大停止时间。② 正在放行的岔口达到了最大放行时间,放行仍未结束且未触发优先放行。满足以上任意一个条件,立即结束当前岔口序号/优先级的放行,巡检下一个需要放行的岔口序号/优先级。如果仅有一个岔口序号/优先级有车,则继续放行该岔口序号/优先级;如果存在2个及以上的岔口序号/优先级有车,则放行排在次位的岔口序号/优先级。一旦执行超时放行判断,正在放行的路口的时间归零并重新计时。
(5) 出列判断。获取各岔口序号/优先级的车辆信息,将车辆列表中大于出列门限且正在远离路口的车辆记为出列状态。
(6) 闯红灯判断。车辆入列岔口为绿灯放行状态,则记录车辆在各自入列岔口内最小位置信息。当车辆离开入列岔口,停止更新最小位置信息。车辆入列岔口为红灯状态,则更新车辆在入列岔口内的实时位置信息。当车辆离开入列岔口,停止更新实时位置信息。由绿灯切换为红灯的岔口,若在此入列车辆的最后位置信息已经小于20 m,则视为未闯红灯,否则以红灯等待状态进行判定。所有当前为红灯等待状态的车辆,如果车辆距离路口5 m以内或已经进入其他岔口,则认为该车辆已经闯红灯。闯红灯列表遵循先入先出原则。上位机读取闯红灯信息后,闯红灯列表立即清空。
(7) 列表更新。首先,更新各个岔口的入列车辆列表,将出列状态的车辆清除,重新排序其他在列车辆。然后,更新岔口序号/优先级列表,将车辆数为零的岔口序号/优先级清除,重新排序其他岔口序号/优先级。最后,更新当前正在放行的岔口序号/优先级。
(8) 状态发布。路口信号设备包括交通灯和路口声光报警器,最大数量均设为3,用于控制规定数量的交通灯和报警器切换状态。正在放行的岔口序号/优先级亮绿灯,其他亮红灯。
3.1.4 区间控制
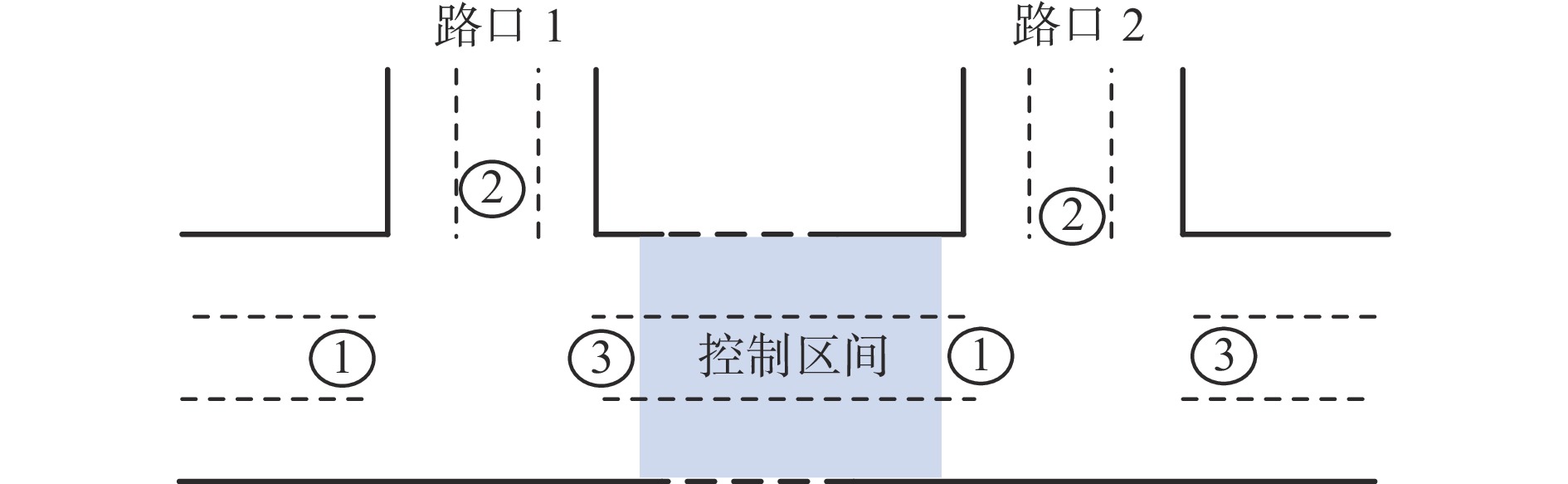
自动控制存在单路口控制和区间控制2种控制逻辑。单路口控制时,当前路口的逻辑控制器与其他路口的逻辑控制器不关联。若相邻路口的2个岔口之间配置成关联岔口,则需要判定是否满足区间控制逻辑。在区间控制的控制逻辑中,2个关联岔口之间是一段控制区间。相邻岔口的控制区间如图12所示。路口1的岔口③与路口2的岔口①相互关联,中间阴影部分为控制区间。
区间控制的控制策略包含敌对闭锁和区间闭锁2种策略,分别对应敌对闭锁区域和区间闭锁区域2种控制区间。当逻辑控制器执行完单路口控制逻辑后,需要判断是否触发区间控制策略,并优先执行区间控制的控制指令。
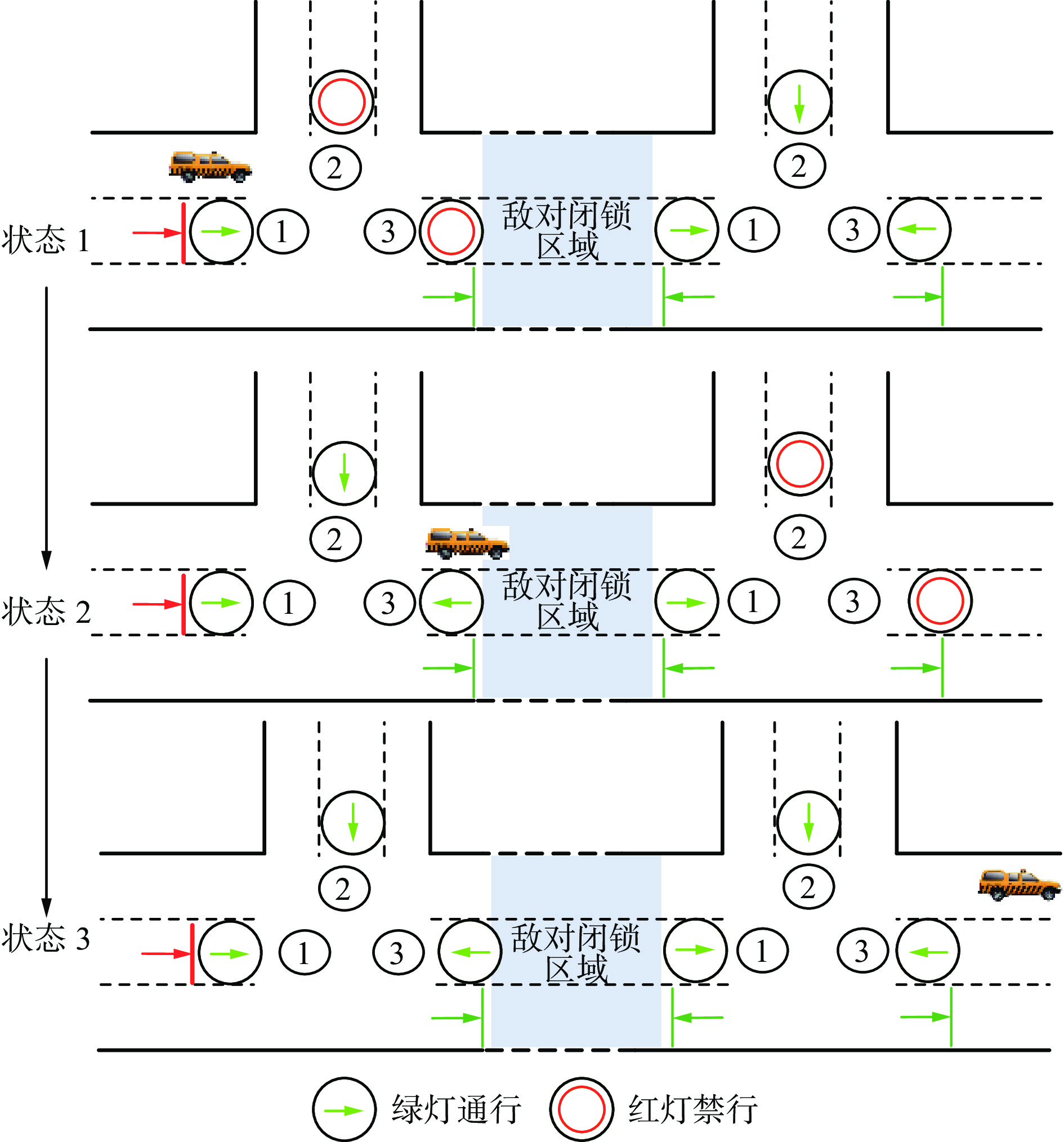
(1) 敌对闭锁区域。如果某段巷道在同一时刻只允许单向通行,此时有车辆从一侧路口驶入该段巷道,则巷道另一侧路口需开启敌对闭锁,避免对向会车。敌对闭锁控制逻辑如图13所示。状态1:车辆驶入左侧①号岔路口的“闭锁门限”时,左侧①号岔口绿灯通行,左侧②号、③号岔口红灯禁行;右侧岔口全部绿灯通行。状态2:车辆驶出左侧③号岔口的“解锁门限”时,触发敌对闭锁逻辑,右侧②号、③号岔口红灯禁行,其他岔口绿灯通行。状态3:车辆驶出右侧路口,结束右侧路口的敌对闭锁。
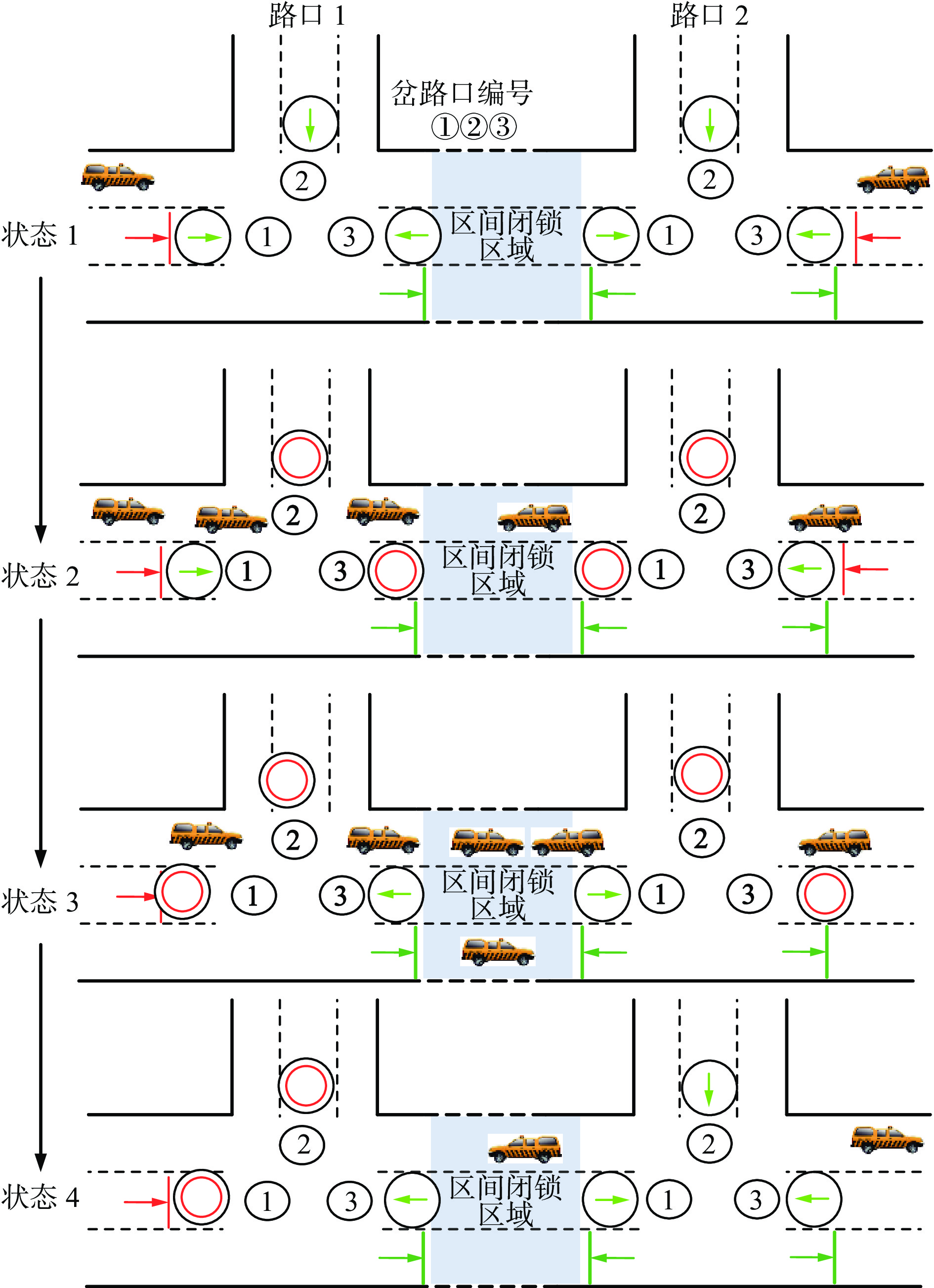
(2) 区间闭锁区域。如果某段巷道易发生拥堵,则开启区间闭锁,限制该段巷道内同一时刻的车辆数。区间闭锁控制逻辑如图14所示。状态1:车辆同时从左侧①号、③号岔口接近区间闭锁区域,且尚未进入两侧路口的闭锁区间时,2个路口全部为绿灯通行状态。状态2:车辆驶入两侧路口的闭锁区间时,此时车辆未超过规定数量,左侧①号岔口和右侧③号岔口绿灯通行,其他岔口红灯禁行。状态3:当区间闭锁区域内车辆数超过一定数量时,触发区间闭锁,左侧①号、左侧②号、右侧②号、右侧③号岔口红灯禁行;左侧③号、右侧①号岔口绿灯放行。状态4:当区间闭锁区域内车辆数减少到一定数量时,结束区间闭锁,执行单路口控制。
3.2 通信模块
控制系统的通信模块主要包括交通灯和声光报警器的串口协议信息传输模块、逻辑控制器与定位基站之间车辆信息传递的UDP协议传输模块、相邻逻辑控制器、逻辑控制器与上位机之间的Modbus TCP协议传输模块。通信模块的软件代码基于IEC61131-3规范标准进行开发,设计了通用的UDP协议模块、串口协议信息传输模块及Modbus TCP客户端与服务器模块。
3.2.1 串口协议信息传输模块
控制系统以信息发布形式向交通灯和声光报警器发布指令信息。串口协议信息传输模块有Modbus RTU和私有协议2种,支持不同串口并行发送,相同串口顺序发布。Modbus RTU协议为通用Modbus协议。私有协议执行GB2312—1980《信息交换用 汉字编码字符集》标准,声光报警器可自定义文字播报内容。逻辑控制器自动判断当前串口通信设备的数量、协议长度及协议下发次数,将接收到的指令发送给串口通信设备。串口协议信息传输模块会实时判断当前在线设备的收发状态、输出设备的故障码列表。
3.2.2 UDP协议传输模块
UDP协议数据不可复用,所以在1个射频接收周期内,仅有1个逻辑控制器能请求到有效数据报文,其他逻辑控制器只能请求到空数据报文。煤矿井下短距离内分布多个路口,1个逻辑控制器控制1个路口时需要获取多个定位基站的UDP数据。如果不对UDP协议数据进行复用,会导致每个路口都需要重复加设多个基站,大大降低交通灯自动控制系统的竞争力。因此,控制系统设计了定位基站的主动轮询、轮询转发、被动接收3种数据获取策略。如果逻辑控制器配置的当前定位基站的数据获取策略是主动轮询,那么逻辑控制器会主动请求该定位基站发送UDP数据。如果逻辑控制器配置的当前定位基站的数据获取策略是被动接收,那么逻辑控制器不会主动请求该定位基站发送UDP数据,而是等待其他配置为轮询转发的逻辑控制器将请求到的UDP数据转发给自己。如果逻辑控制器配置的当前定位基站的数据获取策略是轮询转发,那么逻辑控制器会主动请求定位基站发送UDP数据,并将接收到的UDP数据转发给指定的配置为被动接收的逻辑控制器。通过采用带有转发机制的数据获取策略,能够大幅减少基站的安装数量,从而提高交通灯自动控制系统的经济性,降低定位基站的施工与维护成本。
UDP协议的收发之间不需要建立连接。因此,将UDP数据的接收模块和发送模块独立进行管理,从而实现UDP数据的瞬时批量发送和随机无序读取[14]。发送模块会判断逻辑控制器配置的每一个定位基站的数据获取策略,如果是被动接收策略,则直接跳过该定位基站,如果是主动轮询或轮询转发策略,则立即发送请求指令向对应的定位基站获取UDP数据。接收模块循环接收每一条收到的UDP数据报文。通过数据报文中包含的定位基站站号,判断当前UDP数据来源于哪个定位基站,并存入相应的定位基站数据集。如果当前UDP数据报文需要转发给另一个逻辑控制器,则立即给该逻辑控制器发送获取到的UDP数据报文。数据转发的指令执行完毕后,才会接收下一条UDP数据报文。
3.2.3 Modbus TCP协议传输模块
Modbus TCP协议传输模块分为服务端和客户端2个模块。1个逻辑控制器启动1个Modbus TCP服务端。上位机主动连接该服务端,向当前逻辑控制器传输配置信息,并实时获取当前逻辑控制器的各种设备状态。除了交通灯和路口声光报警器,其他连接逻辑控制器的串口设备的控制指令均通过该服务端下发给对应的逻辑控制器。服务端中规划了区域关联控制点表,相邻逻辑控制器能够主动打开Modbus TCP客户端,与当前逻辑控制器的服务端建立通信连接,读取当前逻辑控制器服务端中的区域关联控制信息。区域关联控制信息主要包括相邻路口处关联岔口的出列车辆列表、历史入列车辆列表等。区域关联控制信息主要用于执行区域控制相关的逻辑判断。
4. 系统调试与应用
4.1 模拟巷道测试
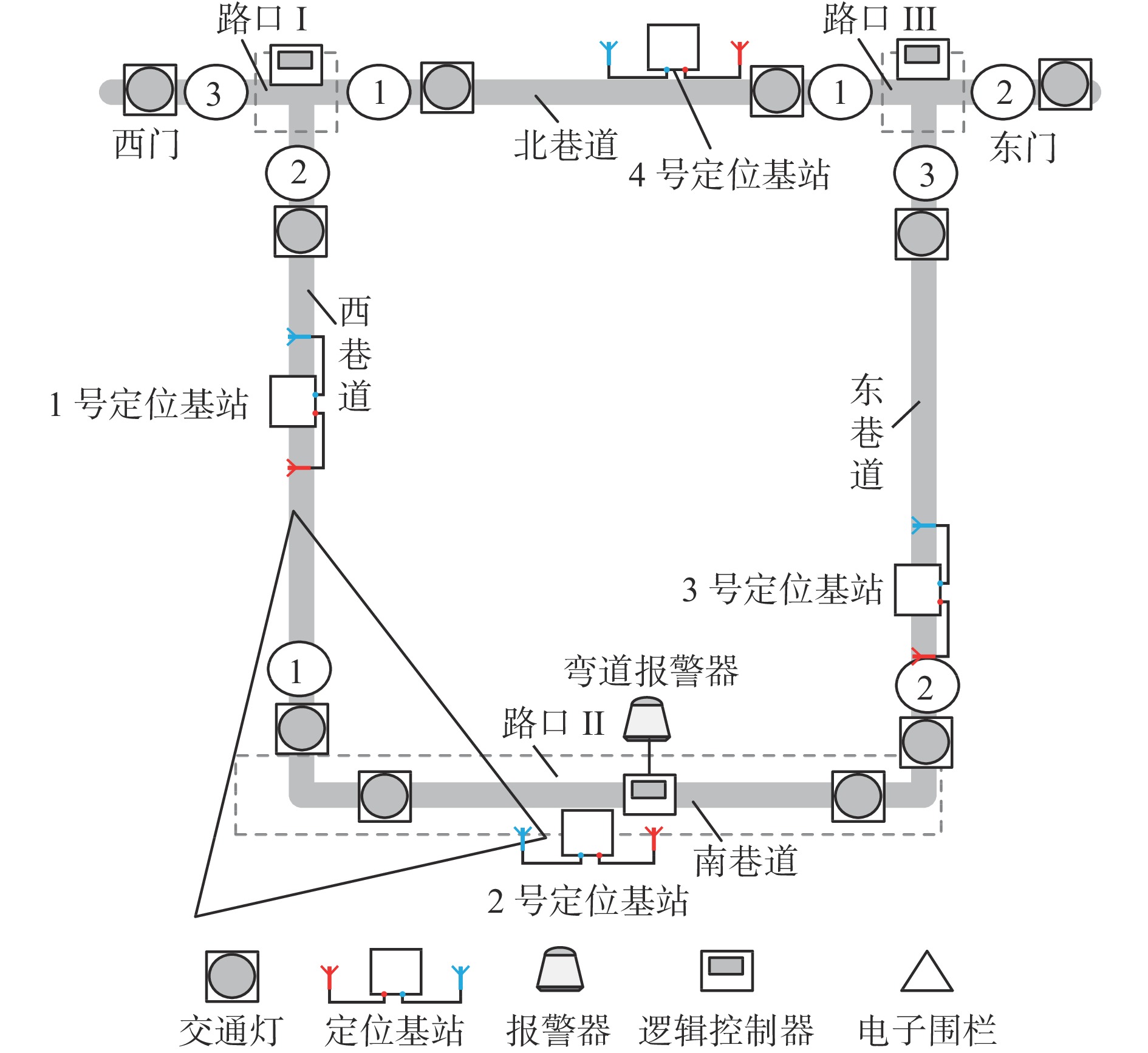
模拟巷道内部共4条巷道,组成2个三岔路口和1个U形弯路口。根据该巷道的路口特征,设计搭建了交通灯自动控制系统。交通灯自动控制系统包含3台KDW56B矿用隔爆电源,3个KXH18(D)本安型逻辑控制器,10个DXH15L(A)型本安交通灯,4 个KJ69J-D2矿用本安定位基站及1个KXB18A声光报警器。3个逻辑控制器分别控制3个路口。各岔口均布置有一定数量的交通灯。路口Ⅰ布置3个交通灯,路口Ⅱ两边各布置2个交通灯,路口Ⅲ布置3个交通灯。每个交通灯均引出一路信号线和一路供电线,在逻辑控制器内部进行串接。信号线接在各自逻辑控制器的RS485-2上。交通灯和逻辑控制器均由可输出6路18 V的矿用隔爆电源进行独立供电。逻辑控制器内部集成以太网交换机,通过以太网与4个定位基站进行UDP通信。弯道报警器串接在路口Ⅱ逻辑控制器的RS485-3上。交通灯自动控制系统布置如图15所示。
![]() 图 15 模拟巷道交通灯自动控制系统布置Figure 15. Layout of traffic light automatic control system of simulated roadway
图 15 模拟巷道交通灯自动控制系统布置Figure 15. Layout of traffic light automatic control system of simulated roadway4.1.1 路口及弯道设置
模拟巷道共布置3个路口/4个基站。路口Ⅰ和路口Ⅲ为标准三岔口,路口Ⅱ为U型路口。在路口Ⅰ设置优先级,岔口①优先级为3,岔口②优先级为2,岔口③优先级为1。路口Ⅱ和路口Ⅲ不设置优先级。U型路口Ⅱ每侧布置2个交通灯,其他路口每个岔口布置1个交通灯。所有路口的入列门限均设为15 m,闭锁门限设为10 m,解锁门限设为6 m,车辆最大停车时间为15 s,岔口最大放行时间为60 s,最大放行车辆数为3辆。
为测试交通灯自动控制系统的信息发布功能,在上位机图形界面的西南角框取电子围栏,安装弯道报警器。弯道报警器接在路口Ⅱ逻辑控制器,由上位机发布报警信息。
4.1.2 UDP数据获取策略设置
路口Ⅰ各岔口均采用被动接收的方式获取基站数据。岔口①和岔口③接收路口Ⅲ处逻辑控制器转发的4号定位基站的数据,岔口②接收路口Ⅱ处逻辑控制器转发的1号定位基站的数据。
路口Ⅱ各岔口均采用轮询转发的方式获取基站数据。岔口①获取1号定位基站的数据并转发给路口Ⅰ逻辑控制器,岔口②获取3号定位基站的数据并转发给路口Ⅲ逻辑控制器。
路口Ⅲ的岔口①和岔口②采用轮询转发方式获取4号定位基站的数据并转发给路口Ⅰ逻辑控制器,岔口③采用被动接收的方式接收路口Ⅱ处逻辑控制器转发的3号定位基站的数据。
4.1.3 测试流程
首先,在路口Ⅰ和路口Ⅲ测试单路口逻辑。随机进行放行闭锁、解锁、闯红灯、优先放行、超时放行的测试,验证逻辑代码的正确性。
然后,进行连续路线交通灯自动控制系统性能测试。逻辑控制器内部设定的任务周期循环时间为200 ms,记录下每次触发自动控制的放行逻辑时逻辑控制器的任务执行时间与交通灯状态切换的时间,测试流程如下:
(1) 车辆从西口驶入巷道内,进入路口Ⅰ。向南拐进西巷道,触发放行逻辑时系统的周期时间为5 146 μs,交通灯切换状态耗时0.88 s。
(2) 车辆继续向南行驶,进入路口Ⅱ。标志卡进入电子围栏,上位机发送报警指令,报警器闪烁红灯并连续播报“车辆进入弯道,请注意避让”。车辆继续行驶拐入南巷道。标志卡从另一侧走出电子围栏,上位机发送停止指令,报警器立即停止闪烁和报警。到头拐入东巷道,触发放行逻辑时系统的周期时间为5 580 μs,交通灯切换状态耗时0.91 s。
(3) 车辆沿东巷道向北行驶,进入路口Ⅲ。向东拐出至东门,触发放行逻辑时系统的周期时间为5 240 μs,交通灯切换状态耗时0.92 s。
(4) 车辆沿原路线返回,经过路口Ⅲ、路口Ⅱ、路口Ⅰ。此时沿线交通灯状态相反。触发放行逻辑时系统的周期时间分别为5 412 ,6 041和5 880 μs,交通灯切换状态耗时分别为0.91,0.87和0.89 s。
测试结果表明:交通灯自动控制系统相关控制逻辑均正确。逻辑判定响应时间远小于系统内部循环周期(200 ms),交通灯状态切换延迟小于1 s。弯道报警器正确报警,信息发布系统运行正常。
4.2 现场验证
中煤陕西榆林大海则煤业有限公司大海则煤矿使用无轨车辆执行井下运输任务,在录车辆约140辆,运输线路不固定且运输任务繁重,重要路口流量大。
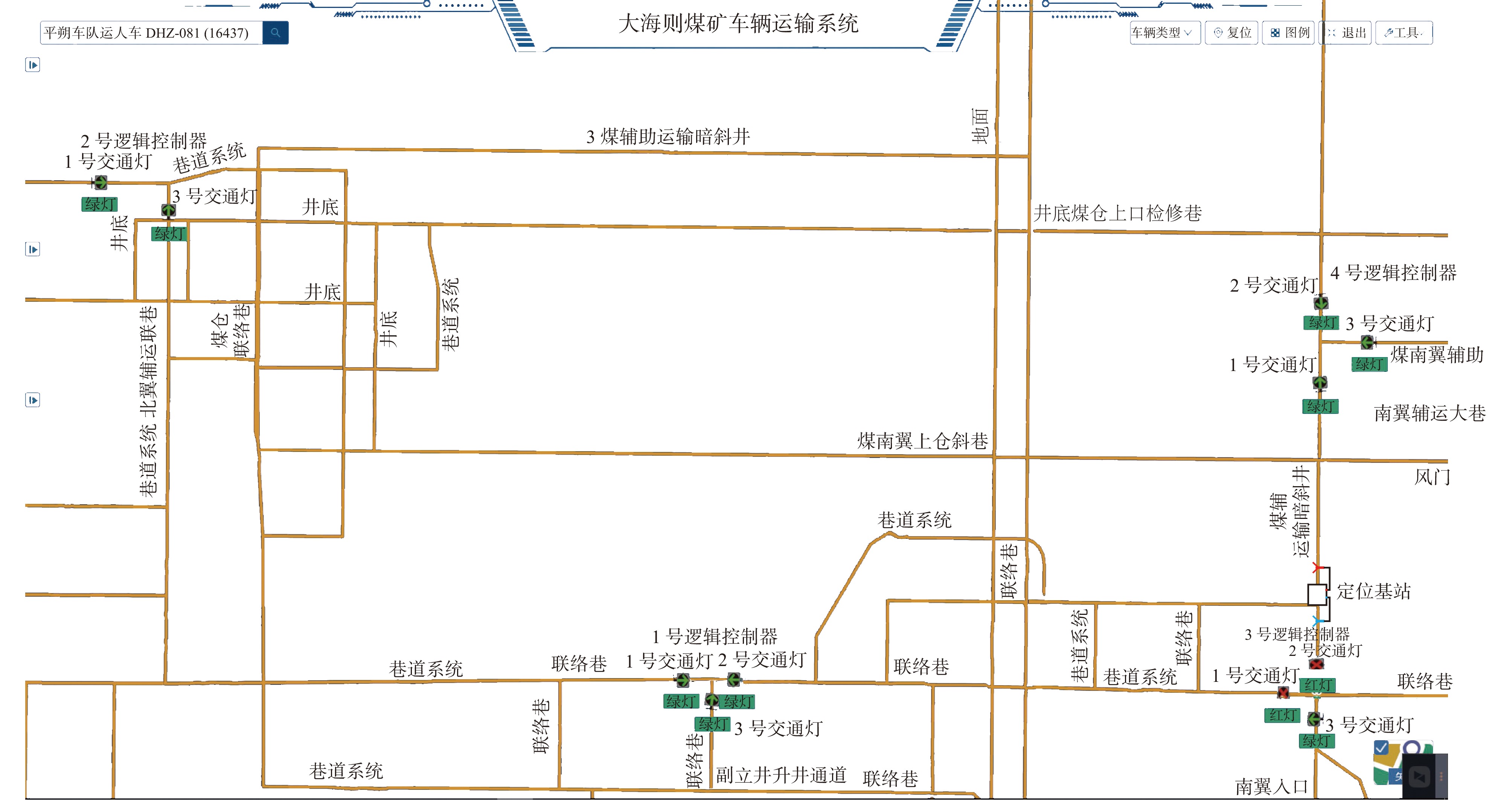
大海则煤矿交通灯自动控制系统布置如图16所示。交通灯自动控制系统在该现场已安装运行6个月,重点布置管控4个路口。1号逻辑控制器布置在联络巷三岔路口,处于副立井升井通道附近,各向车流量较大,车辆在路口联巷内无序停车,缺乏有效的路口管控机制。2号逻辑控制器布置在北翼辅运联巷三岔口处,此处为北翼交通要道,存在路口视野盲区。3号逻辑控制器布置在南翼入口,控制四岔路口。4号逻辑控制器布置在南翼辅助运输大巷入口处,该处设置有风门,存在会车盲区。3号和4号路口间距较短,中间仅设置1个定位基站,减少短距离相邻路口处定位基站的安装数量。
![]() 图 16 大海则煤矿交通灯自动控制系统布置Figure 16. Layout of traffic light automatic control system in Dahaize Coal Mine
图 16 大海则煤矿交通灯自动控制系统布置Figure 16. Layout of traffic light automatic control system in Dahaize Coal Mine观察一段时间的运行状态,结果显示:
1号逻辑控制器连续放行一侧车辆后正确切换另一侧车辆放行,执行优先放行。实现车流均衡放行,不在某一侧堆积拥堵。配置停车时间门限为15 s,防止放行岔口内车辆长时间停车影响其他岔口放行。由于运行流量较大,后续又适当增大了入列门限、闭锁门限和解锁门限的距离,扩大路口控制区域。
2号逻辑控制器一侧车辆接近路口,交通灯状态提示另一侧禁行,能够提高盲区错车效率与安全性。实际生产运行过程中,右侧岔口无车进入,因此直接通过上位机将当前路口配置为一个直角路口,减少设备配置数量。
3号与4号逻辑控制器共用相同基站的UDP数据,分别采用轮询转发和被动接收的方式共用关联路段内基站的UDP数据,数据传输稳定,最大数据接收延迟小于300 ms,符合逻辑判断实时性要求。验证了UDP收发模块的稳定性。
3号逻辑控制器所在路口为一个四岔口,有一侧岔口未开放通行。经观察,将当前上位机配置为四岔口,不影响实际三岔口的运行,验证了当前系统配置的广泛适配性。
4号逻辑控制器发布的交通灯状态能够实时指示风门两侧车辆执行直接通过或等待放行,优化了风门盲区处的通过机制。
逻辑控制器存储的闯红灯信息能实时发布在上位机系统上。逻辑控制器配置有控制异常报警机制,出现基站故障,所有交通灯显示故障状态。通过上位机发布定时切换或PC控制指令,逻辑控制器切换交通灯状态,实现远程控制。
5. 结论
(1) 交通灯自动控制系统通过UWB精确定位分站获取车辆定位卡数据信息。依据UWB精确定位基站的技术特征,系统设计了位置信息和行驶状态2个控制参数,确定了定位基站在典型路口处的分布要求,规定了岔口的排序原则和优先级。
(2) 交通灯自动控制系统集成了自动控制、手动控制和定时切换3种控制模式,设置了多种放行机制和区间管控策略。结合控制系统具体的通信需求,交通灯自动控制系统对通信模块进行了优化,设计了通用的UDP协议传输模块、串口协议信息传输模块及Modbus TCP客户端与服务器模块。
(3) 交通灯自动控制系统在模拟巷道的测试表明:交通灯自动控制系统的逻辑代码运行正常,逻辑响应时间小于200 ms,交通灯状态切换的响应时间小于1 s。信息发布系统运行正常,弯道报警器能正确执行报警指令。控制系统的控制性能稳定,控制时效性高。
(4) 交通灯自动控制系统在大海则煤矿现场的使用状况良好,车辆管控效果显著,进一步验证了交通灯自动控制系统的管控性能。路口信息配置灵活,能够高度适配现场各个形式的路口,满足具体的路口管控需求;通过调整控制门限,控制系统能够调整路口控制区域的大小,适应现场运输流量的变化;定位基站采用不同的数据获取策略,减少了精确定位分站的安装数量,降低了交通灯自动控制系统的施工成本;交通灯自动控制系统整体接入辅助运输上位机,真正实现了信息监测、信息发布和远程辅控;上位机能够实时监测井下车辆的交通调度状态,监控车辆的驾驶行为,实现了交通灯的远程管控,提高了辅助运输系统的集成化、信息化和网络化水平。
-
![]()
图 8 典型路口定位基站配置
Figure 8. Positioning base station configurations of typical regular intersections
![]()
图 15 模拟巷道交通灯自动控制系统布置
Figure 15. Layout of traffic light automatic control system of simulated roadway
-
[1] 李爽,薛广哲,方新秋,等. 煤矿智能化安全保障体系及关键技术[J]. 煤炭学报,2020,45(6):2320-2330. LI Shuang,XUE Guangzhe,FANG Xinqiu,et al. Coal mine intelligent safety system and key technologies[J]. Journal of China Coal Society,2020,45(6):2320-2330.
[2] 王国法,杜毅博,庞义辉. 6S智能化煤矿的技术特征和要求[J]. 智能矿山,2022,3(1):2-13. WANG Guofa,DU Yibo,PANG Yihui. Technical characteristics and requirements of 6S intelligent coal mine[J]. Journal of Intelligent Mine,2022,3(1):2-13.
[3] 赵远,吉庆,王腾. 煤矿智能无轨辅助运输技术现状与展望[J]. 煤炭科学技术,2021,49(12):209-216. ZHAO Yuan,JI Qing,WANG Teng. Current status and prospects of intelligent trackless auxiliary transportation technology in coal mines[J]. Coal Science and Technology,2021,49(12):209-216.
[4] 申涛,常李军,吕璐,等. 煤矿无轨辅助运输管理现状及应对措施[J]. 陕西煤炭,2021,40(3):185-187. DOI: 10.3969/j.issn.1671-749X.2021.03.046 SHEN Tao,CHANG Lijun,LYU Lu,et al. Management status and countermeasures of trackless auxiliary transportation in coal mine[J]. Shaanxi Coal,2021,40(3):185-187. DOI: 10.3969/j.issn.1671-749X.2021.03.046
[5] 倪兴华. 安全高效矿井辅助运输关键技术研究与应用[J]. 煤炭学报,2010,35(11):1909-1915. NI Xinghua. Research and application of key technology for safety and high efficient mine auxiliary transportation[J]. Journal of China Coal Society,2010,35(11):1909-1915.
[6] 牛卫国. 基于UWB的煤矿胶轮车智能运输管理系统的开发实践[J]. 机械研究与应用,2020,33(1):151-154. NIU Weiguo. Application practice of intelligent transportation of coal mine rubber wheel vehicle based on UWB[J]. Mechanical Research & Application,2020,33(1):151-154.
[7] 吴畏,唐丽均,田国正. 矿用机车调度管理系统设计[J]. 工矿自动化,2018,44(7):17-21. WU Wei,TANG Lijun,TIAN Guozheng. Design of dispatching management system of mine-used locomotives[J]. Industry and Mine Automation,2018,44(7):17-21.
[8] 郭海军,续芳. 煤矿无轨胶轮车监控调度系统设计[J]. 工矿自动化,2013,39(4):9-12. DOI: 10.7526/j.issn.1671-251X.2013.04.003 GUO Haijun,XU Fang. Design of monitoring and dispatching system of trackless rubber-tyred locomotive in coal mine[J]. Industry and Mine Automation,2013,39(4):9-12. DOI: 10.7526/j.issn.1671-251X.2013.04.003
[9] 佘九华,陈小林,张明杰. 基于物理检测方式的胶轮车运输监控系统[J]. 工矿自动化,2016,42(5):9-11. SHE Jiuhua,CHEN Xiaolin,ZHANG Mingjie. Rubber-tyred vehicle transport monitoring system based on physical detection mode[J]. Industry and Mine Automation,2016,42(5):9-11.
[10] 胡青松,钱建生,李世银,等. 智能煤矿技术研究与政策制定现状[J]. 工矿自动化,2021,47(3):1-8. HU Qingsong,QIAN Jiansheng,LI Shiyin,et al. Status of intelligent coal technology research and policy development[J]. Industry and Mine Automation,2021,47(3):1-8.
[11] 梁栋. 智慧矿山运输设备大数据关键问题研究[J]. 工矿自动化,2021,47(增刊2):65-67. LIANG Dong. Research on key problems of big data of intelligent mine transport equipment[J]. Industry and Mine Automation,2021,47(S2):65-67.
[12] 侯刚,王国法,薛忠新,等. 煤矿辅助运输自动驾驶关键技术与装备[J]. 采矿与岩层控制工程学报,2022,4(3):1-13. HOU Gang,WANG Guofa,XUE Zhongxin,et al. Key technologies and equipment for automatic driving of coal mine auxiliary transportation[J]. Journal of Mining and Strata Control Engineering,2022,4(3):1-13.
[13] 叶国庆,包建军,李亚斌,等. 基于霍尔传感的煤矿人员定位精度验证系统[J]. 工矿自动化,2019,45(6):32-36. YE Guoqing,BAO Jianjun,LI Yabin,et al. Mine personnel positioning accuracy verification system based on Hall sensing[J]. Industry and Mine Automation,2019,45(6):32-36.
[14] 李世其,王长安,朱文革,等. 基于UDP的遥操作数据传输可靠性保证[J]. 自动化与仪器仪表,2013(1):142-145. DOI: 10.3969/j.issn.1001-9227.2013.01.057 LI Shiqi,WANG Chang'an,ZHU Wenge,et al. Ensure teleoperation data transmission reliability based on UDP[J]. Automation & Instrumentation,2013(1):142-145. DOI: 10.3969/j.issn.1001-9227.2013.01.057
-
期刊类型引用(11)
1. 吴志强, 范智博, 郭警醒, 张希帆, 王艳红. 基于元胞自动机模拟的城市干线交通协调控制研究. 河南理工大学学报(自然科学版). 2025(05)  百度学术
百度学术
2. 马超,姚兴,田诚. 煤矿井下UWB定位系统的基站布局优化. 煤矿机械. 2024(01): 119-122 . 百度学术
3. 韩燕南. 基于精确定位技术的无轨胶轮车超员报警检测. 煤矿安全. 2024(01): 225-232 . 百度学术
4. 韩燕南. 煤矿井下无轨胶轮车行车岔路口和弯道识别方法. 煤矿安全. 2024(07): 232-239 . 百度学术
5. 汪学明,黄竞智,宋传智,吴代丰. 基于改进卡尔曼滤波和状态观测器的井下信号灯闭锁控制. 工矿自动化. 2024(11): 118-126+141 . 本站查看
6. 韩燕南,高文,贺耀宜. 基于精确定位技术的煤矿井下小型车避让预警方法. 煤矿安全. 2024(12): 243-249 . 百度学术
7. 王少英,胡世雄,王福忠,王丹. 基于车载激光雷达的城市路段交叉口交通控制研究. 重庆交通大学学报(自然科学版). 2024(12): 77-83 . 百度学术
8. 杜姬芳. 基于物联网的大功率LED智慧路灯终端控制系统设计. 微型电脑应用. 2024(12): 139-142+151 . 百度学术
9. 杨坤. 矿井无轨胶轮车智能化管理系统研究. 工矿自动化. 2023(01): 162-170 . 本站查看
10. 肖强,殷鹏,苏林. 基于单片机的交通灯控制系统设计. 造纸装备及材料. 2023(06): 33-35 . 百度学术
11. 陈湘源,潘涛,周彬. 井工煤矿无轨胶轮车全局调度模型. 工矿自动化. 2023(12): 63-69 . 本站查看
其他类型引用(1)
 下载:
下载:
















计量
- 文章访问数: 339
- HTML全文浏览量: 92
- PDF下载量: 73
- 被引次数: 12
