
Research on positioning algorithm of underground personnel based on UWB
-
摘要: 针对井下高实时性、高精度的人员定位需求,研究了基于超宽带(UWB)的井下人员定位算法。采用双边双向测距(DS−TWR)方式测量定位基站与定位标签的距离,该方式不需要定位基站与定位标签系统时钟同步,从源头上提高了定位精度。根据测距信息,采用加权最小二乘(WLS)算法和CHAN两种位置解算算法估算定位标签的坐标,通过静态实验和动态实验对2种算法的性能进行对比分析,并通过均方根误差和误差累计分布函数(CDF)综合评估定位精度。实验结果表明:静态实验时,CHAN算法和WLS算法的均方根误差分别为5.878 6,8.007 4 cm,CHAN算法的均方根误差比WLS算法低26.59%;动态实验时,CHAN算法和WLS算法的均方根误差分别为12.292 3,21.180 9 cm,CHAN算法的均方根误差比WLS算法低41.97%;CHAN算法的定位精度高于WLS算法,更加适用于煤矿井下人员定位。Abstract: Aiming at the requirement of high real-time and high precision personnel positioning in underground mine, the positioning algorithm of underground personnel based on ultra wide band (UWB) is studied. The double-sided two-way ranging (DS-TWR) mode is adopted to measure the distance between the positioning base station and the positioning tag. This mode does not need the clock synchronization of the positioning base station and the positioning tag system. Therefore, the positioning precision is improved from the source. According to the ranging information, the weighted least squares (WLS) algorithm and CHAN algorithm are used to estimate the coordinates of the positioning tag. The performance of the two algorithms is compared and analyzed through static and dynamic experiments. The positioning precision is comprehensively evaluated through the root mean square error and the cumulative distribution function (CDF) of the error. The experimental results show that in static experiment, the root mean square errors of CHAN algorithm and WLS algorithm are 5.878 6 cm and 8.007 4 cm respectively. The root mean square error of CHAN algorithm is 26.59% lower than that of WLS algorithm. In dynamic experiment, the root mean square errors of CHAN algorithm and WLS algorithm are 12.2923 cm and 21.1809 cm respectively. The root mean square error of CHAN algorithm is 41.97% lower than that of WLS algorithm. The positioning precision of CHAN algorithm is higher than that of WLS algorithm. And CHAN algorithm is more suitable for underground personnel positioning in coal mines.
-
0. 引言
瓦斯爆炸、塌方等灾难严重威胁井下人员的生命安全,因此有必要建立有效的井下人员精确定位方案,当发生矿难时,施救人员可对矿工进行精准定位并展开营救[1]。当前井下定位技术种类较多,如RFID、ZigBee、WiFi、蓝牙等[2]。这几种定位技术基本可满足井下定位要求,但仍存在信号传输距离短、定位精度较低、功耗较高、易受外界干扰等缺陷[3-5]。超宽带(Ultra Wide Band,UWB)定位技术采用纳秒级别的脉冲信号进行通信,具有较高的时间分辨率,适用于非视距环境下的定位,且定位精度较高,与其他几种定位技术相比具有明显优势。
UWB定位基于测距原理,常用的测距算法包括单边双向测距(Single−Sided Two−Way Ranging,SS−TWR)和双边双向测距(Double−Sided Two−Way Ranging,DS−TWR)。其中SS−TWR因受时钟偏移的影响,误差较大[6-7]。DS−TWR在测距双方之间发送多条信息,获得多个时间戳,通过加长测量周期来提高测量精度[8]。井下人员定位对精度要求较高,因此适宜采用DS−TWR测距算法[9]。根据测距信息,通过位置解算算法可得到定位标签的坐标。本文通过静态实验和动态实验对加权最小二乘(Weighted Least Squares,WLS)算法[10]和CHAN[11]两种位置解算算法进行对比分析,并通过均方根误差和误差累计分布函数(Cumulative Distribution Function,CDF)综合评估定位精度。
1. DS−TWR测距模型
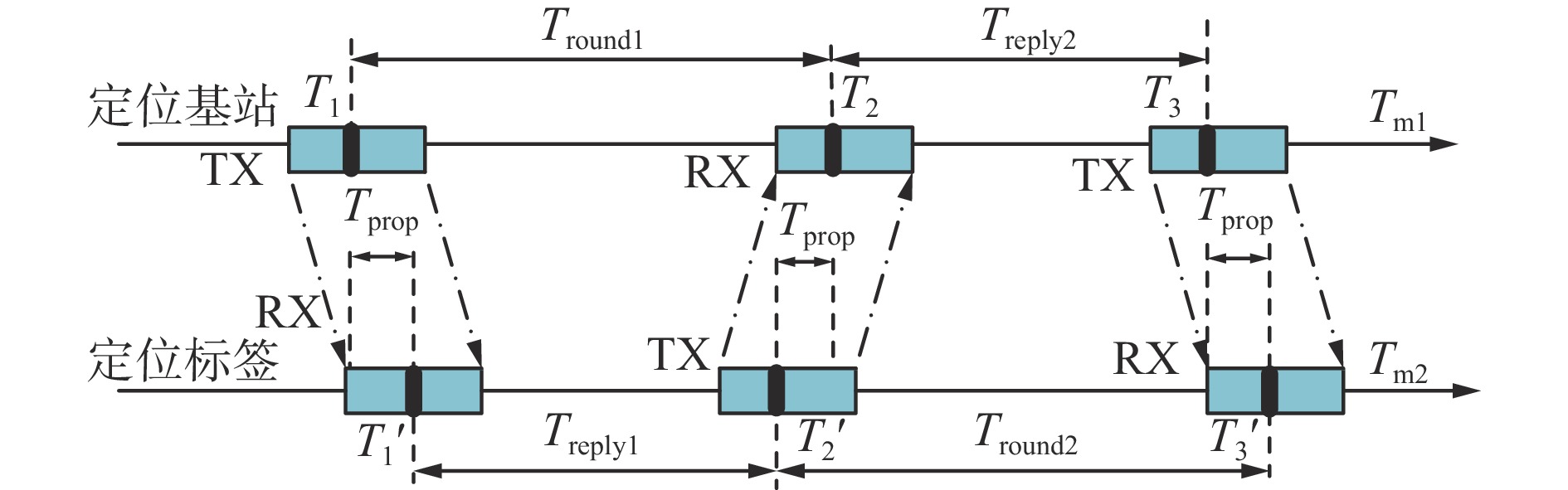
DS−TWR测距模型如图1所示,其中Tprop为UWB信号在定位基站与定位标签之间的传播时间,可利用定位基站和标签的时钟系统记录的时间戳T1—T3,
$T'_1 $ —$T'_3 $ 来计算;Tround1为基站开始发送信号到基站接收到标签信号的时间;Treply1为标签接收到基站信号到标签开始回复基站的时间;Tround2为标签开始回复基站到标签再次接收到基站信号的时间;Treply2为基站接收到标签的回复信号到基站再次发送信号的时间;Tm1,Tm2分别为定位基站和标签的系统时钟。由图1可得
$$ T_{\rm{round1}}=2T_{\rm{prop}}+T_{\rm{reply1}}{{\displaystyle }}_{} $$ (1) $$ T_{\rm{round2}}=2T_{\rm{prop}}+T_{\rm{reply2}}{{\displaystyle }}_{} $$ (2) 将式(1)和式(2)相乘后移项可得
$$ \begin{split} & T_{\rm{round1 }} T_{\rm{round2}} - T_{\rm{reply1}}T_{\rm{reply2}} =\\& \quad T_{\rm{prop}}(4 T_{\rm{prop}} + 2 T_{\rm{reply1}} + 2 T_{\rm{reply2}}) \end{split} $$ (3) 将式(1)和式(2)代入式(3)可得
$$ \begin{split} & T_{\rm{round1}} T_{\rm{round2}} - T_{\rm{reply1}}T_{\rm{reply2}}= \\ &\quad T_{\rm{prop}}(T_{\rm{round1}} + T_{\rm{round2}} + T_{\rm{reply1}} + T_{\rm{reply2}}) \end{split} $$ (4) $$ T_{\rm{prop}}= \dfrac{T_{\rm{round1}}T_{\rm{round2}}-T_{\rm{reply1}}T_{\rm{reply2}}}{(T_{\rm{round1}}+T_{\rm{round2}})+(T_{\rm{reply1}}+T_{\rm{reply2}})} $$ (5) 由式(5)可计算出电磁波在定位标签与定位基站之间的传播时间,结合信号传播速度可计算出传播距离。获得定位基站与定位标签之间的距离后,再通过位置解算算法计算定位标签的坐标[12]。
2. 位置解算算法
2.1 WLS算法
设4个基站的坐标为(xi,yi),i=1,2,3,4,待测定位标签的坐标为(x,y),定位标签到基站的真实距离为ri,测量距离为
$r'_i $ ,$ K{{ = }}{x^2} + {y^2} $ ,${{\boldsymbol{X}}_{{\rm{ls}}}} = \left[ {\begin{array}{*{20}{c}} x \\ y \\ K \end{array}} \right]$ ,根据最小二乘算法可得$$ {{\boldsymbol{X}}}_{{\rm{ls}}}=({{\boldsymbol{A}}}^{{\rm{T}}}{\boldsymbol{A}}{)}{^{-1}}{{\boldsymbol{A}}}^{{\rm{T}}}{\boldsymbol{b}} $$ (6) 式中:
${\boldsymbol{A}} = \left[ {\begin{array}{*{20}{c}} { - 2{x_1}}&{ - 2{y_1}}&1 \\ { - 2{x_2}}&{ - 2{y_2}}&1 \\ { - 2{x_3}}&{ - 2{y_3}}&1 \\ { - 2{x_4}}&{ - 2{y_4}}&1 \end{array}} \right]$ ;${\boldsymbol{b}} = \left[ {\begin{array}{*{20}{c}} {r_1^{'2} - x_1^2 - y_1^2} \\ {r_2^{'2} - x_2^2 - y_2^2} \\ {r_3^{'2} - x_3^2 - y_3^2} \\ {r_4^{'2} - x_4^2 - y_4^2} \end{array}} \right]$ 。求解式(6)即可得到定位标签坐标的最优估计值
$ (x,y) $ 。普通最小二乘算法适用于各个误差项相等的情况,由于井下UWB定位环境复杂,为了提高定位标签位置解算精度,在普通最小二乘算法中引入加权矩阵W。设定位标签到第
$ i $ 个基站的测距误差为$ \;{\beta _i} $ ,则有$$ r_i' = {r_i} + {\beta _i} $$ (7) 用测量距离与真实距离的平方差表示误差矢量:
$$ {\boldsymbol{\varphi}} ={r}_{i}{{'}^2}-{r}_{i}^{2}=({r}_{i}+{\beta }_{i}{)}^{2}-{r}_{i}^{2}=2{r}_{i}{\beta }_{i}+{\beta }_{i}^{2} $$ (8) 在实际应用中,测量误差远小于测量的距离,因此式(8)中的
$ \;\beta _i^2 $ 项可以忽略不计;由于不方便测量定位标签到基站的真实距离,通常利用${r}_{i}{{'}} $ 代替真实距离ri进行近似计算。误差矢量可以进一步表示为$$ {\boldsymbol{\varphi}} \approx 2{r_i}{\beta _i}{\text{ = 2}}{\boldsymbol{B}}{{\boldsymbol{\beta}}} $$ (9) 式中:
${\boldsymbol{B}} = \left[ {\begin{array}{*{20}{c}} {{r_1}}&0&0&0 \\ 0&{{r_2}}&0&0 \\ 0&0&{{r_3}}&0 \\ 0&0&0&{{r_4}} \end{array}} \right]$ ;$\;{{\boldsymbol{\beta}}} {\text{ = }}\left[ {\begin{array}{*{20}{c}} {{\beta _1}} \\ {{\beta _2}} \\ {{\beta _3}} \\ {{\beta _4}} \end{array}} \right]$ 。误差矢量
${\boldsymbol{\varphi}}$ 的协方差矩阵为$$ {\boldsymbol{\varPsi}} {\text{ = }}E{\text{(}}{\boldsymbol{\varphi}} {{\boldsymbol{\varphi}} ^{\rm{T}}}{\text{) = 4}}{\boldsymbol{B}}E{\text{(}}{\boldsymbol{\beta}} {{\boldsymbol{\beta}} ^{\rm{T}}}{\text{)}}{\boldsymbol{B}}{\text{ = 4}}{\boldsymbol{BQB }}$$ (10) 式中E为期望函数。
$$ {\boldsymbol{Q}}{{ = }}\left[ {\begin{array}{*{20}{c}} {\beta _1^2}&0&0&0 \\ 0&{\beta _2^2}&0&0 \\ 0&0&{\beta _3^2}&0 \\ 0&0&0&{\beta _4^2} \end{array}} \right] $$ (11) 最后对
${\boldsymbol{\varPsi}}$ 求逆矩阵,得到加权矩阵W:$$ {\boldsymbol{W}}{{ = }}\left[ {\begin{array}{*{20}{c}} {{\omega _1}}&0&0&0 \\ 0&{{\omega _2}}&0&0 \\ 0&0&{{\omega _3}}&0 \\ 0&0&0&{{\omega _4}} \end{array}} \right] $$ (12) 结合式(6)得到WLS算法计算公式:
$$ {{\boldsymbol{X}}}_{{\rm{wls}}}=({{\boldsymbol{A}}}^{{\rm{T}}}{\boldsymbol{WA}}{)}^{{-1}}{{\boldsymbol{A}}}^{{\rm{T}}}{\boldsymbol{Wb}} $$ (13) 上述推导是针对4个定位基站的情况,当基站数量为4个以上时可在此基础上类推。
2.2 CHAN算法
在求解二维平面中的位置坐标时,若定位基站的数量大于3,则会有冗余测距信息,可得到2个以上非线性方程。在CHAN算法求解过程中,首先使用WLS算法估计定位标签的初始位置坐标,然后结合已知约束条件再次应用WLS算法,得到最终位置坐标估计值。
仍以4个基站为例对CHAN算法进行推导,设
${\boldsymbol{z}} = {[x,y,{r_1}]^{\rm{T}}}$ ,根据文献[13]可得$$ r_{i1}^2 + 2{r_{i1}}{r_1} = {K_i} - {K_1} - 2y{y_{i1}} - 2x{x_{i1}} $$ (14) 式中:
$ {r_{i1}} $ 为定位标签到第i个基站与到第1个基站之间的距离差;$ {K_i} = x_i^2 + y_i^2 $ ;$ {x_{i1}} $ ,$ {y_{i1}} $ 分别为第i个基站与第1个基站的横坐标之差和纵坐标之差。将式(14)改写为
$$ {\boldsymbol{H}} - {{\boldsymbol{G}}_{\rm{a}}}{\boldsymbol{z}} = 0 $$ (15) 式中:
${\boldsymbol{H}} = - \dfrac{1}{2}\left[ {\begin{array}{*{20}{c}} {r_{21}^2 - {K_2} + {K_1}} \\ {r_{31}^2 - {K_3} + {K_1}} \\ {r_{41}^2 - {K_4} + {K_1}} \end{array}} \right]$ ;${{\boldsymbol{G}}_{\rm{a}}} = \left[ {\begin{array}{*{20}{c}} {{x_{21}}}&{{y_{21}}}&{{r_{21}}} \\ {{x_{31}}}&{{y_{31}}}&{{r_{31}}} \\ {{x_{41}}}&{{y_{41}}}&{{r_{41}}} \end{array}} \right]$ 。当矩阵
$ {{\boldsymbol{G}}_{\rm{a}}} $ 可逆时$ {\boldsymbol{z}} $ 的最大似然估计值${\boldsymbol{z}}_{\rm{a}} $ 为$$ \begin{split} {{\boldsymbol{z}}_{\rm{a}}} =& \arg \min [{({\boldsymbol{H}} - {{\boldsymbol{G}}_{\rm{a}}}{{\boldsymbol{z}}_{\rm{a}}})^{\rm{T}}}{{\boldsymbol{\psi}} ^{ - 1}}({\boldsymbol{H}} - {{\boldsymbol{G}}_{\rm{a}}}{{\boldsymbol{z}}_{\rm{a}}})] =\\& {({\boldsymbol{G}}_{\rm{a}}^{\rm{T}}{{\boldsymbol{\psi }}^{ - 1}}{{\boldsymbol{G}}_{\rm{a}}})^{ - 1}}{\boldsymbol{G}}_{\rm{a}}^{\rm{T}}{{\boldsymbol{\psi}} ^{ - 1}}{\boldsymbol{H}} \end{split} $$ (16) 式中
${\boldsymbol{\psi}} $ =c2BQB,c为信号传播速度。在实际应用中通常用
$ {\boldsymbol{Q}} $ 代替$ {\boldsymbol{\psi}} $ ,则式(16)可改写为$$ {{\boldsymbol{z}}_{\rm{a}}} = {({\boldsymbol{G}}_{\rm{a}}^{\rm{T}}{{\boldsymbol{Q}}^{ - 1}}{{\boldsymbol{G}}_{\rm{a}}})^{ - 1}}{\boldsymbol{G}}_{\rm{a}}^{\rm{T}}{{\boldsymbol{Q}}^{ - 1}}{\boldsymbol{H}} $$ (17) 根据定位基站与定位标签之间的距离约束关系得到误差矢量:
$$ {{\boldsymbol{\varphi}} _1} = {\boldsymbol{h}} - {\boldsymbol{g}}{{\boldsymbol{z}}_{\rm{b}}} $$ (18) 式中:
${{\boldsymbol{z}}_{\rm{b}}} = \left[ {\begin{array}{*{20}{c}} {{x^2}} \\ {{y^2}} \end{array}} \right];{\boldsymbol{g}} = \left[ {\begin{array}{*{20}{c}} 1&0 \\ 0&1 \\ 1&1 \end{array}} \right];{\boldsymbol{h}} = \left[ {\begin{array}{*{20}{c}} {z_{\rm{a}}^2(1)} \\ {z_{\rm{a}}^2(2)} \\ {z_{\rm{a}}^2(3)} \end{array}} \right]$ 。$ {{\boldsymbol{\varphi }}_1} $ 的协方差矩阵为$$ {{\boldsymbol{Y}}'}{{ = }}4{{\boldsymbol{B}}'}{{\rm{cov}}} ({{\boldsymbol{z}}_{\rm{a}}}){{\boldsymbol{B}}'} $$ (19) 式中:
${{\boldsymbol{B}}'} = {\rm{diag}}(x,y,{r_1});{{\rm{cov}}} ({{\boldsymbol{z}}_{\rm{a}}}) = {({\boldsymbol{G}}_{\rm{a}}^{\rm{T}}{{\boldsymbol{\psi}} ^{ - 1}}{{\boldsymbol{G}}_{\rm{a}}})^{ - 1}}$ 。采用WLS算法对式(18)进行求解,得
$$ {{\boldsymbol{z}}_{\rm{b}}} = {({{\boldsymbol{g}}^{\rm{T}}}{{\boldsymbol{Y}}^{ - 1}}{\boldsymbol{g}})^{ - 1}}{{\boldsymbol{g}}^{\rm{T}}}{{\boldsymbol{Y}}^{ - 1}}{\boldsymbol{h}} $$ (20) $$ \left[ {\begin{array}{*{20}{c}} x \\ y \end{array}} \right] = \pm \left[ {\begin{array}{*{20}{c}} {\sqrt {{z_{\rm{b}}}(1)} } \\ {\sqrt {{z_{\rm{b}}}(2)} } \end{array}} \right] $$ (21) 最后根据先验条件可以求得定位标签坐标估计值。
3. 实验分析
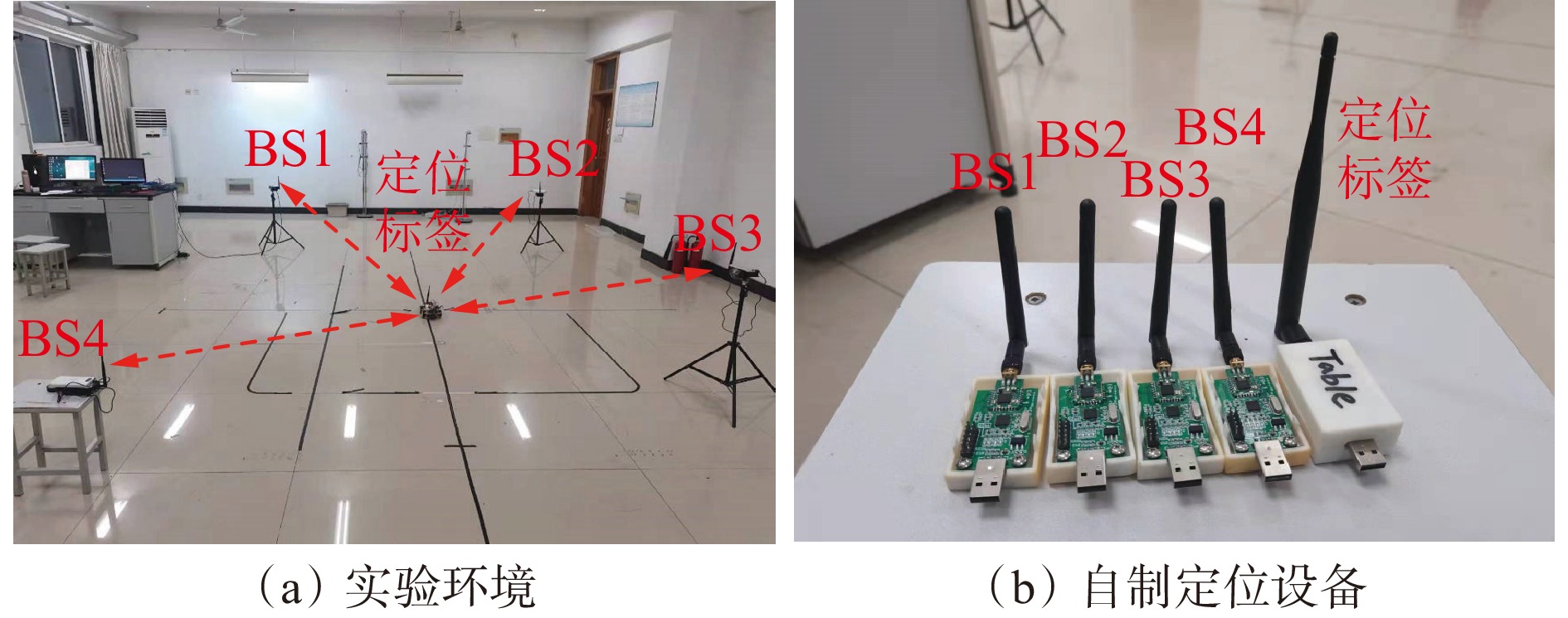
为了对比分析WLS算法和CHAN算法的效果,在实验室模拟井下环境,采用4个定位基站进行实验,如图2所示。设4个定位基站BS1−BS4的坐标分别为(0,0),(560 cm,0),(560 cm,800 cm),(0,720 cm),实验设备数据更新频率为1 Hz。
![]() 图 2 实验环境与自制定位设备Figure 2. Experimental environment and self-made positioning equipment
图 2 实验环境与自制定位设备Figure 2. Experimental environment and self-made positioning equipment3.1 静态实验分析
实验开始时,将定位标签放置在坐标(320 cm,400 cm)处,采集测距信息,并利用2种算法进行定位,结果如图3所示。
![]() 图 3 CHAN与WLS算法定位结果(静态实验)Figure 3. Positioning results of CHAN and WLS algorithms (static experiment)
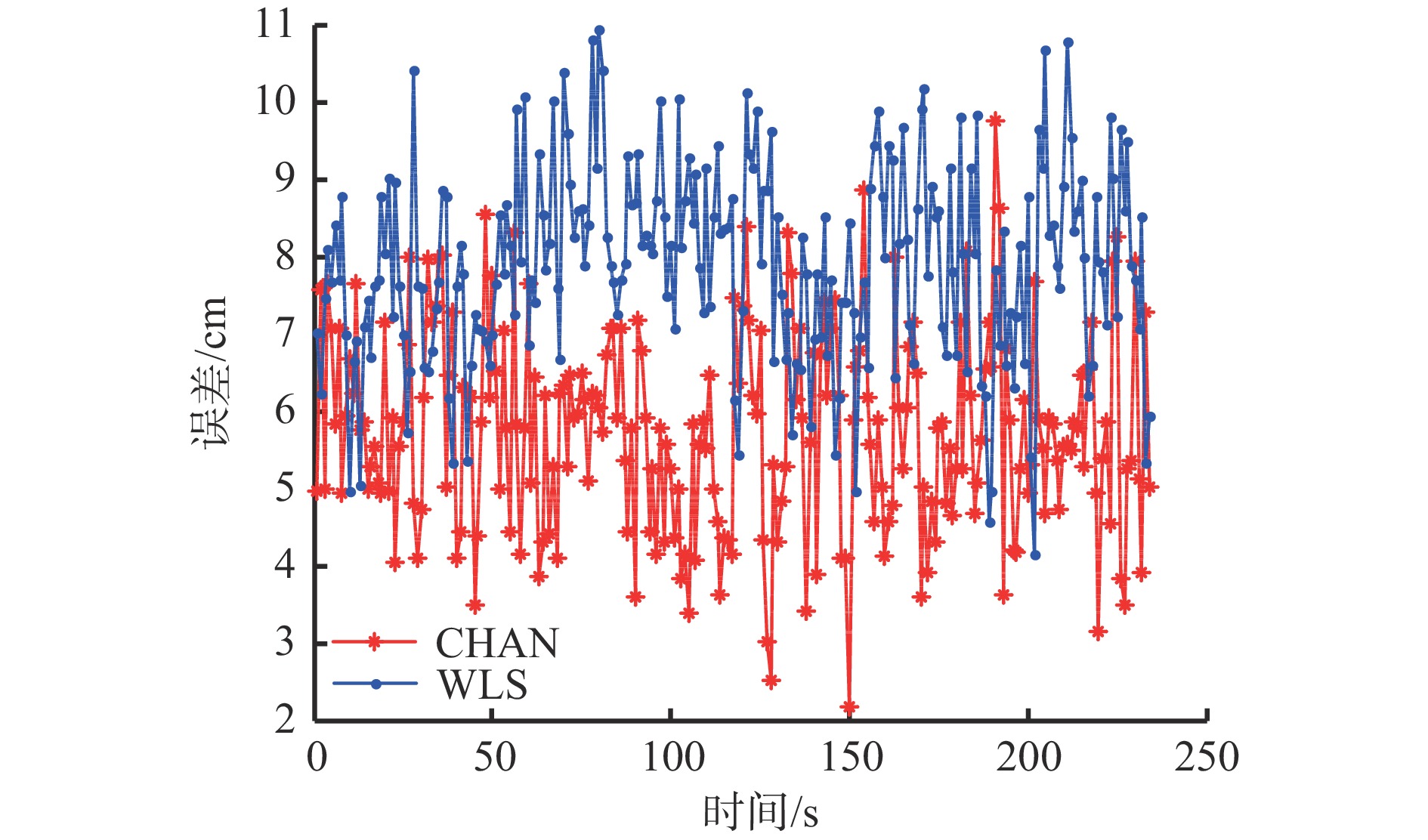
图 3 CHAN与WLS算法定位结果(静态实验)Figure 3. Positioning results of CHAN and WLS algorithms (static experiment)计算定位标签估算位置与真实位置的欧氏距离,并绘制误差曲线,如图4所示。可看出,定位标签为静态时,CHAN算法的定位误差小于WLS算法。经计算,CHAN算法和WLS算法的均方根误差分别为5.878 6,8.007 4 cm,CHAN算法的均方根误差比WLS算法低26.59%。
![]() 图 4 CHAN与WLS算法误差对比(静态实验)Figure 4. Comparison of errors between CHAN and WLS algorithms(static experiment)
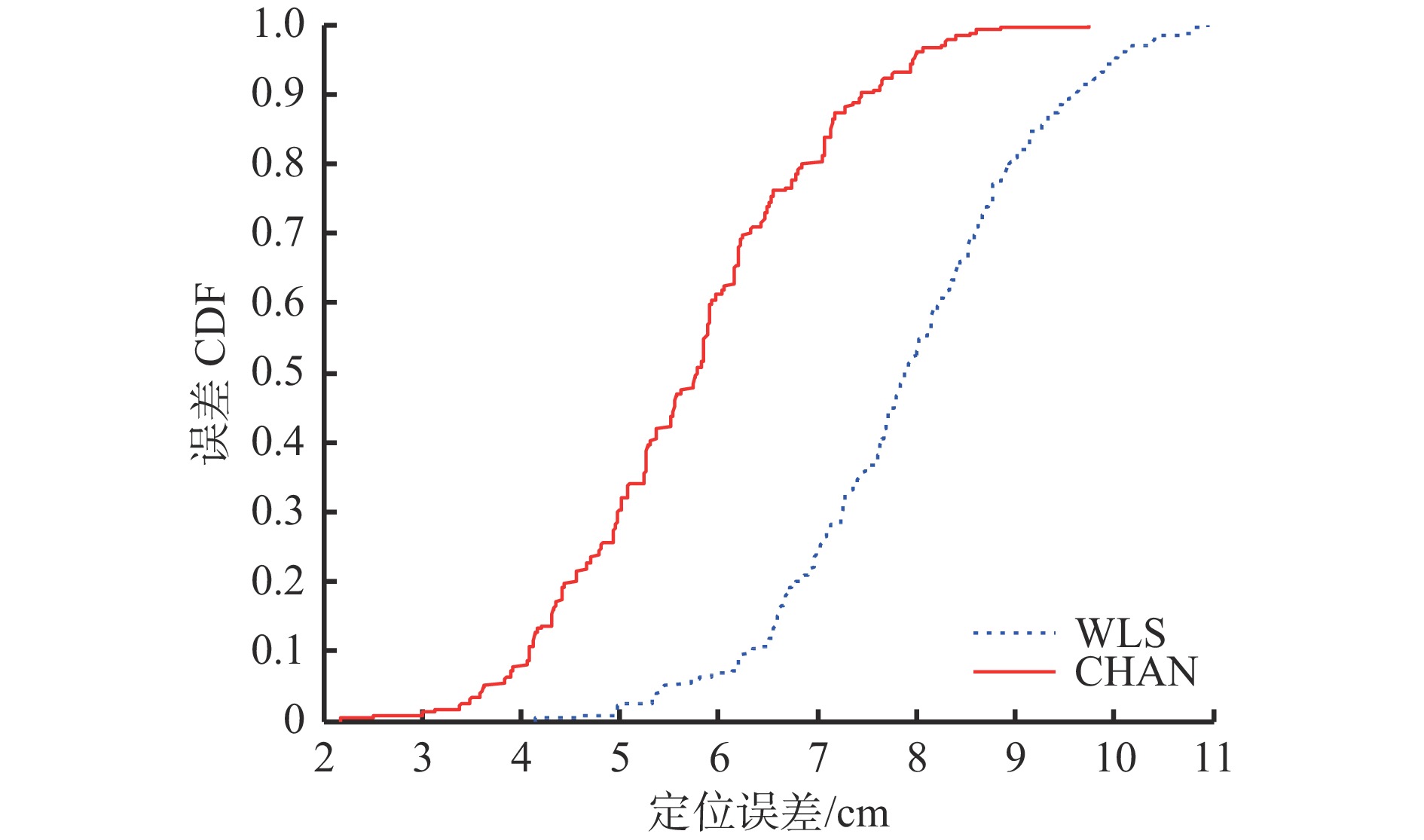
图 4 CHAN与WLS算法误差对比(静态实验)Figure 4. Comparison of errors between CHAN and WLS algorithms(static experiment)CHAN算法和WLS算法的误差CDF曲线如图5所示。可看出,CHAN算法的误差CDF曲线在WLS算法的左上方,在设置同一误差门限值的条件下,CHAN算法的误差在门限值以内的概率较高。例如,当误差门限值取7 cm时,CHAN算法的误差在7 cm以内的概率约为80%,WLS算法的误差在7 cm以内的概率约为25%。
![]() 图 5 CHAN与WLS算法的误差CDF曲线(静态实验)Figure 5. Error CDF curves of CHAN and WLS algorithms (static experiment)
图 5 CHAN与WLS算法的误差CDF曲线(静态实验)Figure 5. Error CDF curves of CHAN and WLS algorithms (static experiment)3.2 动态实验分析
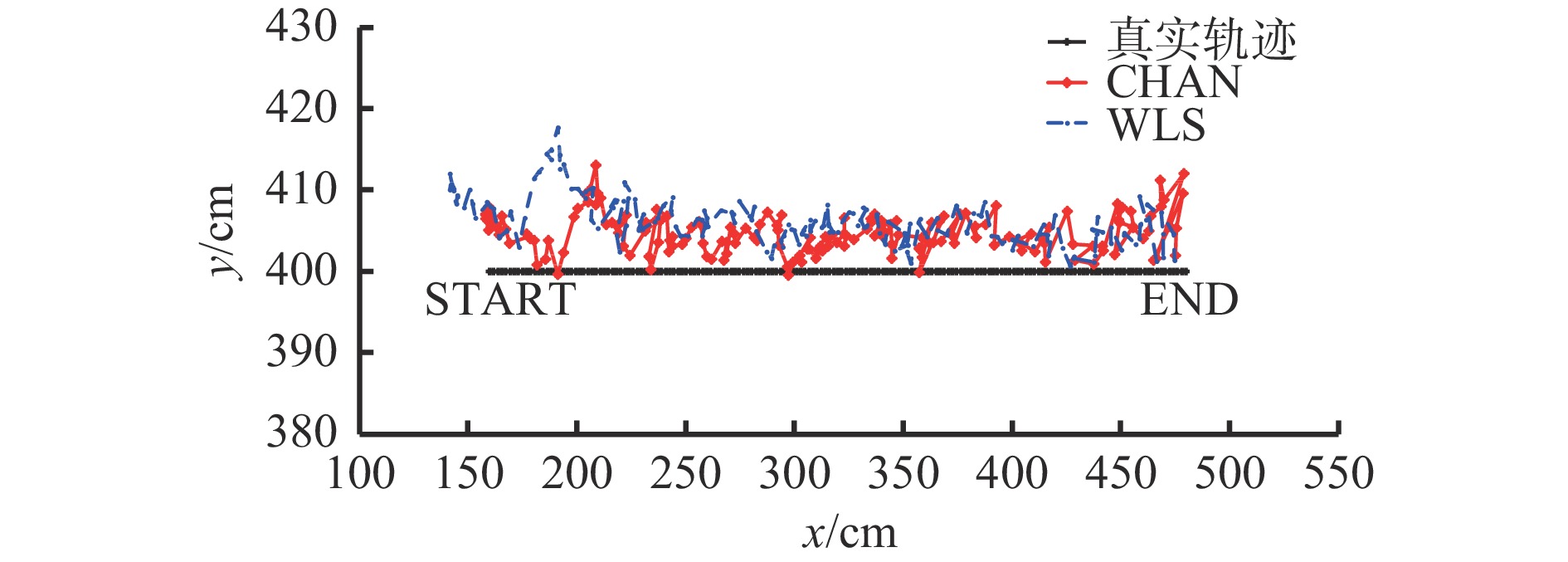
利用移动小车搭载定位标签,模拟井下携带定位标签的作业人员。定位标签起始点坐标为(160 cm,400 cm),结束点坐标为(480 cm,400 cm),小车匀速行驶。利用CHAN和WLS算法得到的定位结果如图6所示。可看出,用CHAN算法得到的轨迹更加接近真实轨迹。
![]() 图 6 CHAN与WLS算法定位结果(动态实验)Figure 6. Positioning results of CHAN and WLS algorithms (dynamic experiment)
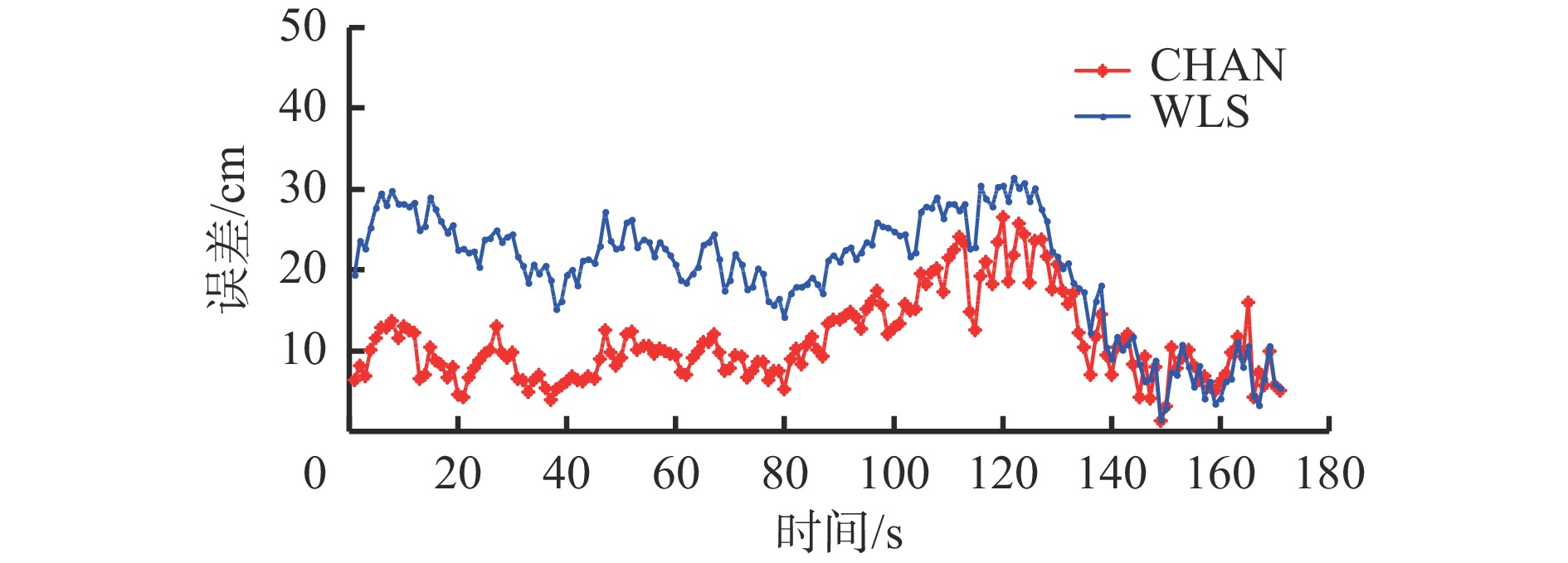
图 6 CHAN与WLS算法定位结果(动态实验)Figure 6. Positioning results of CHAN and WLS algorithms (dynamic experiment)计算不同时刻定位标签估算位置与真实位置的欧氏距离,并绘制误差曲线,如图7所示。可看出,定位标签为动态时,CHAN算法的定位误差小于WLS算法。经计算,CHAN算法和WLS算法的均方根误差分别为12.292 3,21.180 9 cm,CHAN算法的均方根误差比WLS算法低41.97%。
![]() 图 7 CHAN与WLS算法误差对比(动态实验)Figure 7. Comparison of errors between CHAN and WLS algorithms(dynamic experiment)
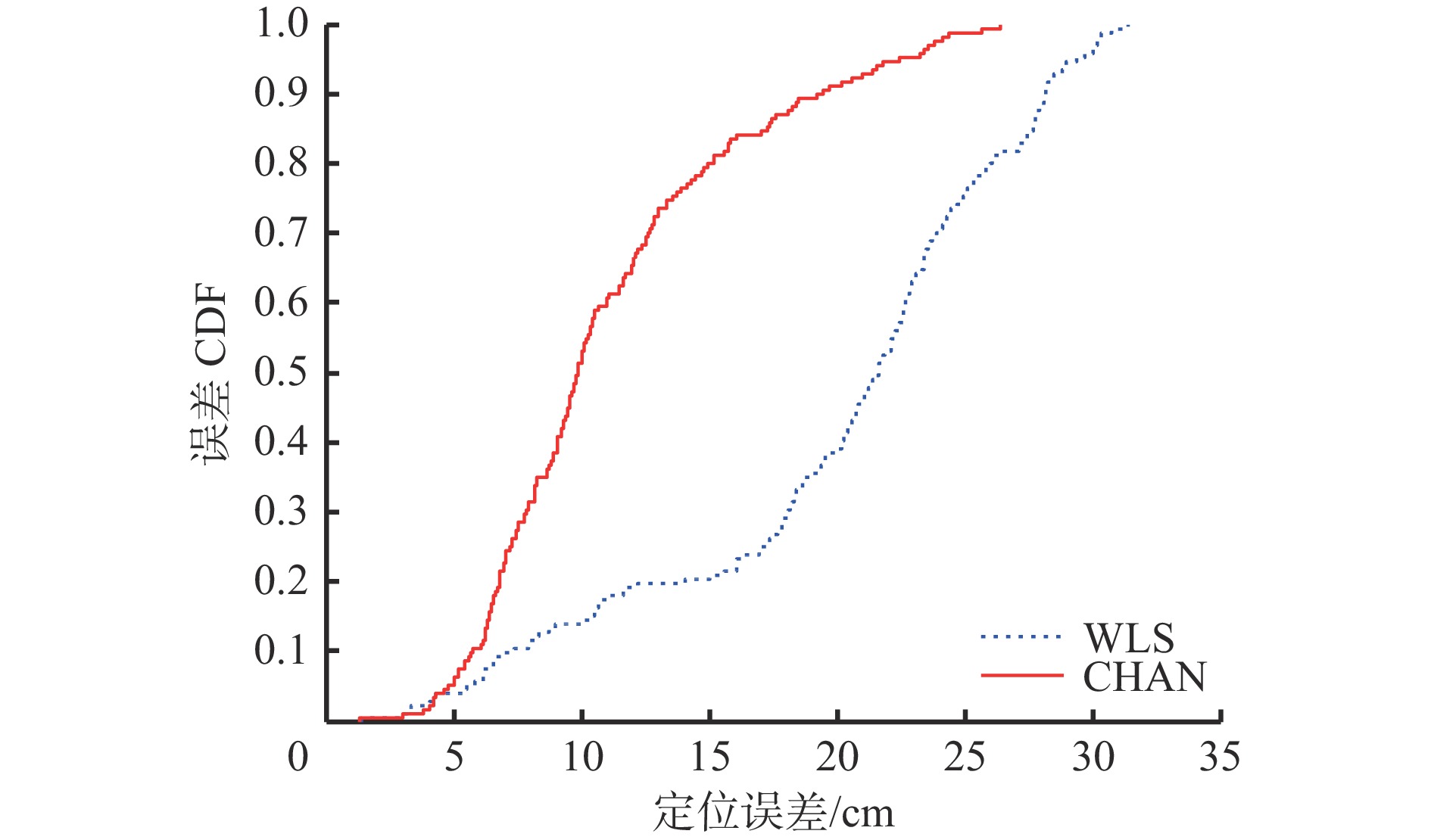
图 7 CHAN与WLS算法误差对比(动态实验)Figure 7. Comparison of errors between CHAN and WLS algorithms(dynamic experiment)CHAN算法和WLS算法的误差CDF曲线如图8所示。
![]() 图 8 CHAN与WLS算法的误差CDF曲线(动态实验)Figure 8. Error CDF curves of CHAN and WLS algorithms (dynamic experiment)
图 8 CHAN与WLS算法的误差CDF曲线(动态实验)Figure 8. Error CDF curves of CHAN and WLS algorithms (dynamic experiment)从图8可看出,CHAN算法的误差CDF曲线基本在WLS算法的上方,说明在动态实验中CHAN算法的定位精度高于WLS算法。
4. 结语
研究了基于UWB的井下人员定位算法。采用DS−TWR方式测量定位基站与定位标签的距离,利用WLS算法和CHAN算法对静态测距信息和动态测距信息进行解算,最后通过均方根误差和误差CDF综合评估2种算法的定位性能。实验结果表明:静态实验时,CHAN算法和WLS算法的均方根误差分别为5.878 6,8.007 4 cm,CHAN算法的均方根误差比WLS算法低26.59%;动态实验时,CHAN算法和WLS算法的均方根误差分别为12.292 3,21.180 9 cm,CHAN算法的均方根误差比WLS算法低41.97%;CHAN算法的定位精度高于WLS算法,更加适用于煤矿井下人员定位。
-
![]()
图 2 实验环境与自制定位设备
Figure 2. Experimental environment and self-made positioning equipment
![]()
图 3 CHAN与WLS算法定位结果(静态实验)
Figure 3. Positioning results of CHAN and WLS algorithms (static experiment)
![]()
图 4 CHAN与WLS算法误差对比(静态实验)
Figure 4. Comparison of errors between CHAN and WLS algorithms(static experiment)
![]()
图 5 CHAN与WLS算法的误差CDF曲线(静态实验)
Figure 5. Error CDF curves of CHAN and WLS algorithms (static experiment)
![]()
图 6 CHAN与WLS算法定位结果(动态实验)
Figure 6. Positioning results of CHAN and WLS algorithms (dynamic experiment)
![]()
图 7 CHAN与WLS算法误差对比(动态实验)
Figure 7. Comparison of errors between CHAN and WLS algorithms(dynamic experiment)
-
[1] 王龙康,李祥春,李安金,等. 我国煤矿安全生产现状分析及改善措施[J]. 中国煤炭,2016,42(9):96-100. DOI: 10.3969/j.issn.1006-530X.2016.09.023 WANG Longkang,LI Xiangchun,LI Anjin,et al. Analysis and improvement measures on current situation of coal mine safety production in China[J]. China Coal,2016,42(9):96-100. DOI: 10.3969/j.issn.1006-530X.2016.09.023
[2] 汪义庭. 基于UWB的无线室内定位系统设计与实现[D]. 淮南: 安徽理工大学, 2019. WANG Yiting. Design and implementation of wireless indoor positioning system based on UWB[D]. Huainan: Anhui University of Science and Technology, 2019.
[3] BIANCHI V,CIAMPOLINI P,MUNARI I D. RSSI-based indoor localization and identification for ZigBee wireless sensor networks in smart homes[J]. IEEE Transactions on Instrumentation and Measurement,2019,68(2):566-575. DOI: 10.1109/TIM.2018.2851675
[4] VU-HOANG L, NGUYEN-MANH H, PHAN-DUY C, et al. A new technique to enhance accuracy of WLAN fingerprinting based indoor positioning system[C]//IEEE Fifth International Conference on Communications and Electronics, Danang, 2014.
[5] CHEN X, WANG Z J. Reliable indoor location sensing technique using active RFID[C]//The 2nd International Conference on Industrial Mechatronics and Automation, Wuhan, 2010.
[6] 刘鹏媛. 基于UWB的高速弹丸定距关键技术研究及实现[D]. 太原: 中北大学, 2020. LIU Pengyuan. Research and implementation of the key technology of high speed projectile distance determination based on UWB[D]. Taiyuan: North University of China, 2020.
[7] 严嘉祺. 基于UWB的室内定位系统的算法与误差分析[D]. 哈尔滨: 哈尔滨工业大学, 2020. YAN Jiaqi. Algorithm and error analysis of indoor positioning system based on UWB[D]. Harbin: Harbin Institute of Technology, 2020.
[8] 陈思远,尹栋,牛轶峰. 基于UWB的SS−TWR改进方法研究与实现[J]. 计算机应用研究,2021,38(11):3398-3402. CHEN Siyuan,YIN Dong,NIU Yifeng. Research and implementation of improved SS-TWR method based on UWB[J]. Application Research of Computers,2021,38(11):3398-3402.
[9] SHULE W,ALMANSA C M,QUERALTA J P,et al. UWB-based localization for multi-UAV systems and collaborative heterogeneous multi-robot systems[J]. Procedia Computer Science,2020,175:357-364. DOI: 10.1016/j.procs.2020.07.051
[10] WANG Gang,CAI Shu,LI Youming,et al. A bias-reduced nonlinear WLS method for TDOA/FDOA-based source localization[J]. IEEE Transactions on Vehicular Technology,2016,65(10):8603-8615. DOI: 10.1109/TVT.2015.2508501
[11] LI Aiguo, LUAN Fuzeng. An improved localization algorithm based on CHAN with high positioning accuracy in NLOS-WGN environment[C]//The 10th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, 2018: 332-335.
[12] 刘怡佳. 非视距环境下的UWB室内定位技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2020. LIU Yijia. Research on UWB indoor positioning technology in non-line-of-sight environment[D]. Harbin: Harbin Institute of Technology, 2020.
[13] 顾慧东. 基于UWB的室内测距与定位系统[D]. 南京: 南京邮电大学, 2020. GU Huidong. Indoor ranging and positioning system based on UWB[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2020.
-
期刊类型引用(17)
1. 冉登科. 屯宝洗煤厂智能照明与人员定位系统一体化设计与应用. 能源与环保. 2025(06)  百度学术
百度学术
2. 陈贤. 基于UWB的TOF与TDOA井下联合定位方法. 煤矿安全. 2025(02): 220-225 . 百度学术
3. 杨昊坤,凌宇志,张栋梁. 基于YOLO算法的海上钻井平台人员定位算法研究. 现代传输. 2024(04): 41-44 . 百度学术
4. 马光辉,陈莉伟. 基于UWB的隧道内人员定位系统设计研究. 微型电脑应用. 2024(09): 40-44 . 百度学术
5. 陈贤,周澍,张蓉. 一种井下人员乘车识别与定位方法. 煤矿安全. 2024(11): 217-221 . 百度学术
6. 王媛彬,郭亚茹,刘佳,王旭,吴冰超,刘萌. 基于注意力机制和空洞卷积的CycleGAN煤矿井下低照度图像增强算法. 煤炭科学技术. 2024(S2): 375-383 . 百度学术
7. 杨坤. 矿井无轨胶轮车智能化管理系统研究. 工矿自动化. 2023(01): 162-170 . 本站查看
8. 康俊瑄. 基于微型惯性传感器的井下人员跟踪定位系统. 中国安全生产科学技术. 2023(01): 73-78 . 百度学术
9. 郑学召,严瑞锦,蔡国斌,王宝元,何芹健. 矿井动目标精确定位技术及优化方法研究. 工矿自动化. 2023(02): 14-22 . 本站查看
10. 李斐. 三维环境下的智能水力发电厂移动目标UWB定位方法. 水力发电. 2023(04): 81-86 . 百度学术
11. 刘厚荣. 基于5G和UWB融合基站的井下系统应用分析. 自动化与仪器仪表. 2023(05): 318-322+327 . 百度学术
12. 鲜炜,杨杰,吴绩伟. 测量精度约束的模糊度搜索定位算法. 计算机应用研究. 2023(07): 2053-2059 . 百度学术
13. 刘德龙,柳景斌,龚晓东,邓浩坤. 一种基于UWB位置感知的室内人员安全管控方法. 测绘科学. 2023(06): 38-48 . 百度学术
14. 潘世一. 基于视觉定位技术的水力发电厂入侵人员UWB定位方法. 水力发电. 2023(11): 109-114 . 百度学术
15. 王文庆,朱梁,吴益凡. 一种基于UWB的CTK-IDS联合定位算法. 西安邮电大学学报. 2023(04): 9-17 . 百度学术
16. 李政民. 煤矿智能供电系统综合分析平台设计. 工矿自动化. 2023(S2): 130-132+149 . 本站查看
17. 郁露,唐超礼,黄友锐,韩涛,徐善永,付家豪. 基于UWB和IMU的煤矿机器人紧组合定位方法研究. 工矿自动化. 2022(12): 79-85 . 本站查看
其他类型引用(18)


 下载:
下载:











































计量
- 文章访问数: 248
- HTML全文浏览量: 37
- PDF下载量: 55
- 被引次数: 35
