
Research on the application of modulated model predictive control in coal mine power quality management based on STATCOM
-
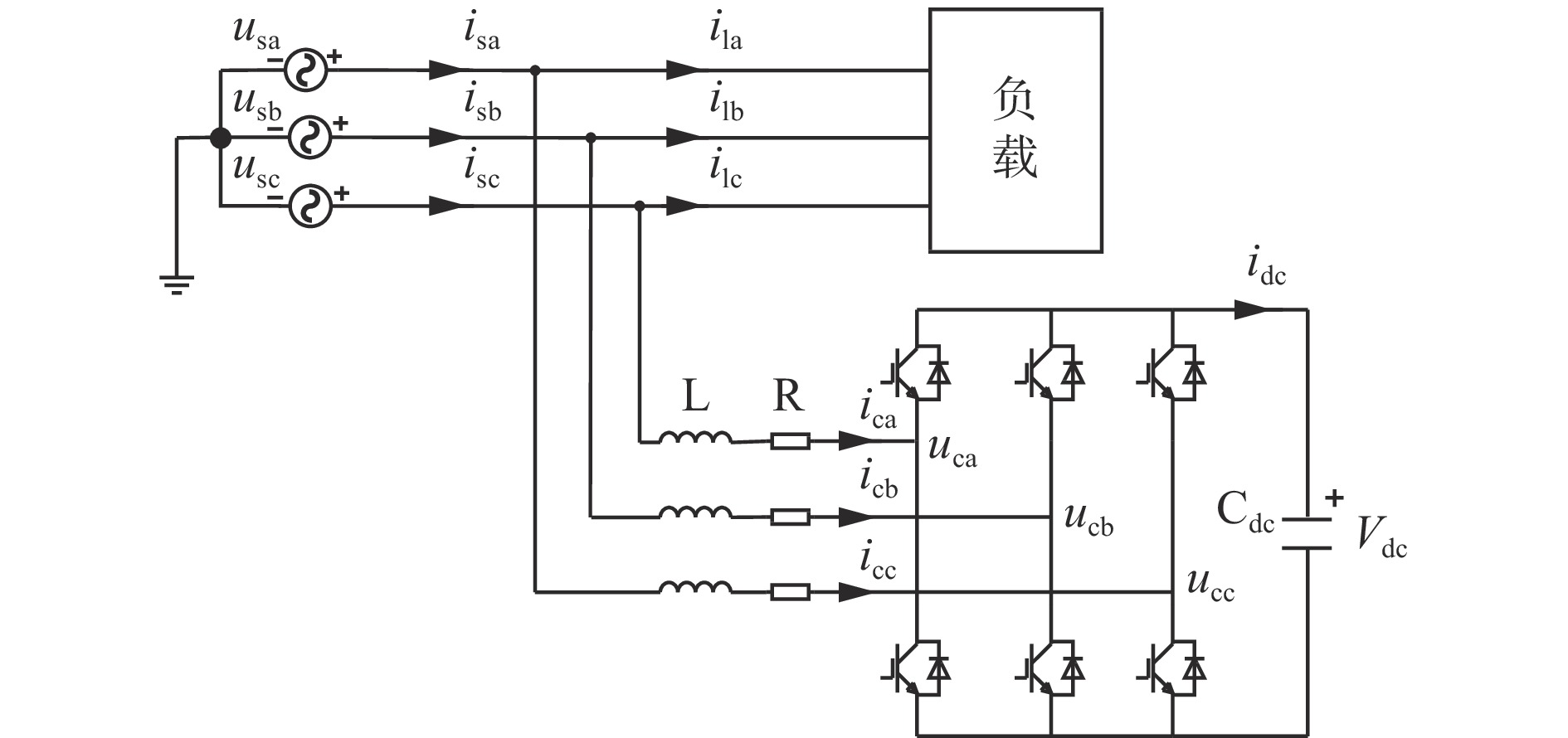
摘要: 大量电力电子设备及非线性负载接入煤矿电网,使得煤矿电网中存在大量电流谐波及无功功率,严重危害煤矿电网电能质量。传统电能质量治理策略大多采用比例积分(PI)调节器对静止同步补偿器(STATCOM)进行控制,以实现谐波抑制和无功补偿,但其参数难以调节且动态响应慢。针对上述问题,提出了一种基于调制模型预测控制(M2PC)的STATCOM控制策略。首先,采用ip−iq法检测出电网中的谐波电流和无功电流作为M2PC的参考电流;其次,根据参考电流及STATCOM数学模型计算出每个扇区的2个有效矢量和零矢量的占空比及扇区代价函数;然后,通过最小化代价函数得到最佳扇区和该扇区所对应的2个最佳有效矢量和零矢量的占空比;最后,根据空间矢量调制(SVM)方式分配开关脉冲,实现固定的开关频率,从而控制STATCOM发出补偿电流,以抵消电网中的谐波电流与无功电流。仿真和实验结果表明:投入基于M2PC的STATCOM前,电网侧电流畸变严重,电网侧无功功率波动大,电网侧功率因数存在波动且小于1;投入基于M2PC的STATCOM后,由于STATCOM补偿了电网侧谐波电流,使得电网侧电流总谐波畸变率(THD)大幅度降低,且由于STATCOM补偿了负载所需无功功率,电网侧无功功率基本保持为0,电网侧功率因数稳定为1,有效改善了电能质量。Abstract: A large number of power electronic devices and nonlinear loads are connected to the coal mine power grid, causing a large amount of current harmonics and reactive power in the coal mine power grid. It seriously endangers the power quality of the coal mine power grid. The traditional coal mine power quality control strategies mostly use proportional integral (PI) regulators to control static synchronous compensator (STATCOM) to achieve harmonic suppression and reactive power compensation. But their parameters are difficult to adjust and their dynamic response is slow. In order to solve the above problems, a STATCOM control strategy based on modulated model predictive control (M2PC) is proposed. Firstly, the ip-iq method is used to detect the harmonic current and reactive current in the power grid as the reference current for M2PC. Secondly, based on the reference current and STATCOM mathematical model, the duty cycle and sector cost function of the two effective vectors and zero vectors for each sector is calculated. Thirdly, by minimizing the cost function, the optimal sector and the duty cycle of the two optimal effective vectors and zero vectors corresponding to that sector are obtained. Finally, according to the space vector modulation (SVM) method, switching pulses are allocated to achieve a fixed switching frequency. It thereby controls STATCOM to emit compensation current to offset harmonic and reactive currents in the power grid. The simulation and experimental results show that before the adopting of M2PC based STATCOM, the grid side current distortion is severe, the reactive power fluctuation on the grid side is large. The power factor on the grid side fluctuates and is less than 1. After the adopting of M2PC based STATCOM, the total harmonic distortion rate (THD) of the grid side current is significantly reduced due to STATCOM compensating for the harmonic current on the grid side. Moreover, due to STATCOM compensating for the required reactive power of the load, the reactive power on the grid side remains basically 0. The power factor on the grid side remains stable at 1, effectively improving power quality.
-
0. 引言
煤矿井下运输机器人通常用于矸石、煤炭、设备和材料的运输。然而,运输机器人需要频繁穿梭于狭窄且障碍物繁多的巷道和综采工作面中,多数运输机器人不具备智能自主避障功能,躲避障碍物需依赖人工操作[1],增加了工作人员劳动强度,若操作不当会导致翻车事故,存在一定的安全隐患。因此,研究具有自主避障功能的井下运输机器人对提高煤矿生产运输效率具有重要意义。
近年来,众多学者对机器人避障技术进行了研究。曹现刚等[2]采用人工势场法改进快速随机扩展树算法,在此基础上提出了一种煤矸分拣机器人避障轨迹规划方法,设计了一种环境敏感型目标偏置策略来提升机器人路径局部特性。金将等[3]针对蚁群算法应用于路径规划时存在的盲目搜索、路径平滑性差等缺点,提出了一种改进的蚁群算法,以提高搜索效果。张彪等[4]提出了一种改进的动态寻优蚁群算法,实时评估和调整机器人路径,实现即时动态避障功能。王欣等[5]建立机器人动力学模型,提出了一种判断转弯方向和转弯角度的策略,使得救灾机器人能够在井下实现自主避障。机器学习和人工智能的飞速发展,加速了其在煤矿机器人中的应用[6]。巩固等[7]提出了基于运动视频的光流场目标视觉识别方法,可识别煤矿井下环境目标。李芳威等[8]通过时间弹性带(Time Elastic Band,TEB)算法进行局部路径规划。张立亚等[9]基于红外摄像仪与激光雷达多源传感融合技术,提出了一种基于子图像分割映射点云空间的机器人避障算法,具有较高的避障效率。宋秦中等[10]提出了一种基于卷积神经网络(Convolutional Neural Network,CNN)的井下无人驾驶无轨胶轮车运动避障控制算法。郭爱军等[11]提出了动态环境下的避障方法,实现了井下矿车的动态自主避障和安全行驶。张可琨等[12]利用障碍物评价子函数改进动态窗口(Dynamic Window Approach,DWA)算法,有效提升了搬运机器人动态避障能力。Yang Hongxia等[13]提出了一种改进A*算法与增强型DWA算法相结合的机器人避障方案,对搜索点选择策略和代价函数进行优化,提升了机器人避障效率。Xu Zhenyang等[14]提出了一种基于改进A*算法与DWA算法的移动机器人自主导航算法,采用DWA算法将移动机器人的驱动直接限制在速度空间内,同时与环境动态交互以实时调整机器人运动轨迹,实现了基于全局最优的未知障碍物规避。彭继国等[15]提出了一种基于模糊控制的井下机器人智能视觉避障方法,通过模糊控制算法计算机器人的转向角度和加速度,实现井下机器人智能避障。王利民等[16]提出了一种融合改进A*算法与DWA算法的煤矿机器人路径规划方法,将改进A*算法规划出的路径节点依次作为局部路径规划DWA的局部目标点,从而缩短路径长度,并通过调整DWA代价函数中的权值比例来提升避障性能。鲁志等[17]提出了一种基于改进A*算法与改进DWA算法的机器人动态避障方法,该方法在A*算法中引入全局障碍物占比,在DWA算法中加入目标点代价子函数,从而实现移动机器人的动态避障。
现有的机器人避障方法多依赖于预设规则或外部奖励信号,难以适应井下复杂多变的动态环境。本文提出一种基于内在动机强化学习(Intrinsic Motivation Reinforcement Learning,IM−RL)算法的煤矿井下运输机器人自主避障方法。煤矿井下运输机器人通过视觉传感器感知外界环境信息,利用基于好奇心[18-19]的内在动机取向函数[20]计算其判断外界环境物体属性的内部奖赏值,利用外部动机奖励函数计算其动作属性的外部奖赏值,结合内在动机取向函数的奖励权重和外部动机奖励函数的奖励权重计算其综合奖赏值,将此奖赏值作为强化学习算法[21]奖励机制,通过深度置信网络对运输机器人状态进行训练和学习,激励运输机器人主动探索未知环境,使其向自身的记忆机制中存储知识和经验,通过不断学习和训练实现井下运输机器人自主避障。
1. IM−RL算法
IM−RL算法利用一个七元组模型〈A,S,V(i),H,R(si,ai),Q(si,ai),p(si,ai)〉进行序列化描述,其中各元素具体含义如下。
1) A:运输机器人动作集合。A={ai|i=1,2,···,ma},其中ai为运输机器人第i个动作,以当前机器人碰到或避开障碍物的动作、接近或远离目标点的动作等来描述,ma为运输机器人所有动作的数量。
2) S:运输机器人状态集合。S={si|i=1,2,···,ms},其中si为运输机器人第i个动作对应的第i个状态,以当前机器人与障碍物的距离、当前机器人与目标点的距离等来描述,ms为运输机器人所有状态的数量。
3) V(i):评价函数。
$$ V\left( i \right) = \max {U^*}\left( {{s_i},{a_i}} \right) $$ (1) 式中U*(si,ai)为运输机器人在状态si时执行动作ai后对动作的评价。
4) H:内在动机取向函数。取向函数用于引导运输机器人在环境中的学习方向,运输机器人根据环境中前后位置的取向函数变化对不稳定空间中的内部奖赏值进行更新。一般情况下,当运输机器人靠近障碍物时,内部奖赏值较低;当运输机器人靠近目标点时,内部奖赏值较高。
$$ H = \dfrac{{1 - {\exp\left({ - \lambda V\left( i \right)}\right)}}}{{1 + {\exp\left({ - \lambda V\left( i \right)}\right)}}} $$ (2) 式中λ为内在动机取向函数的修饰参数,0<λ≤1。
5) R(si,ai):综合奖赏值,即运输机器人在状态si时执行动作ai转移到下一状态si+1后所得到的综合奖赏值。
$$ R\left(s_i,a_i\right)=\xi H+\eta r_{\mathrm{ex}}=\xi\frac{1-\exp\left(-\lambda V\left(i\right)\right)}{1+\exp\left(-\lambda V\left(i\right)\right)}+\eta r_{\mathrm{ex}} $$ (3) 式中:ξ为内在动机取向函数的奖励权重;η为外部动机奖励函数的奖励权重,ξ+η=1;rex为外部动机奖励函数。
6) Q(si,ai):值函数。
将外部动机奖励函数rex分为2个部分:
$$ r_{\mathrm{ex}}=r_{\mathrm{ex}{\text-}\mathrm{obs}}+r_{\mathrm{ex}{\text-}\mathrm{goal}} $$ (4) 式中:rex-obs为运输机器人相对障碍物的运动方向、距离和位置所产生的奖励(rex-obs=−0.5,接近障碍物;rex-obs=+0.5,远离障碍物;rex-obs=0,其他运动);rex-goal为运输机器人相对目标点的运动方向、距离和位置所产生的奖励(rex-goal=−0.5,远离目标点;rex-goal=+0.5,接近目标点;rex-goal=0,其他运动)。
则IM−RL算法的值函数迭代公式为
$$ \begin{split} Q\left( {{s_{i + 1}},{a_{i + 1}}} \right) = & Q\left( {{s_i},{a_i}} \right) + \kappa \Bigg[ {\left( {\xi \frac{{1 - {\exp\left({ - \lambda V\left( i \right)}\right)}}}{{1 + {\exp\left({ - \lambda V\left( i \right)}\right)}}} + \eta {r_{{\mathrm{ex}}}}} \right) + } \\ & {\gamma Q\left( {{s_{i + 1}},{a_{i + 1}}} \right) - Q\left( {{s_i},{a_i}} \right)} \Bigg] \\[-5pt] \end{split} $$ (5) 式中:κ为学习因子;γ为折扣因子。
7) p(si,ai):运输机器人在状态si时执行动作ai后的适应率。
2. 基于IM−RL算法的煤矿井下运输机器人自主避障流程
基于IM−RL算法的煤矿井下运输机器人自主避障流程如图1所示,具体步骤如下。
![]() 图 1 基于IM−RL算法的井下运输机器人自主避障流程Figure 1. Autonomous obstacle avoidance process of underground transport robot based on IM-RL algorithm
图 1 基于IM−RL算法的井下运输机器人自主避障流程Figure 1. Autonomous obstacle avoidance process of underground transport robot based on IM-RL algorithmStep 1:初始化当前运输机器人状态,随机选取学习因子κ和折扣因子γ,同时根据运输机器人工作环境选择恰当的内在动机取向函数的奖励权重ξ和外部动机奖励函数的奖励权重η。
Step 2:运输机器人通过视觉传感器感知外界环境信息,随机获取运输机器人当前状态信息。
Step 3:根据强化学习马尔可夫决策过程(Markov Decision Process,MDP)迭代公式计算当前可能执行的动作的奖赏值,运输机器人根据当前奖赏值选择合适的动作ai。
Step 4:执行动作ai后,运输机器人得到全新状态si+1,并随着下一状态的学习,通过内在动机取向函数计算其判断外界环境物体属性的内部奖赏值,利用外部动机奖励函数计算其动作属性的外部奖赏值。若机器人在训练过程中发生碰撞,则返回一定范围的初始状态重新开始训练。
Step 5:根据不同的奖励权重、内部奖赏值和外部奖赏值计算综合奖赏值,形成强化学习算法奖励机制,通过外界环境反馈到深度置信网络进行下一步训练。
Step 6:重复Step 2至Step 5,直到完成自主学习。
3. 机器人自主避障仿真实验
3.1 静态环境下机器人自主避障仿真实验
3.1.1 实验环境和评价指标
创建尺寸为36 m×36 m的仿真实验环境地图,如图2所示,图中黑色区域表示实验环境中不可触及的障碍物区域,白色方格区域表示煤矿运输机器人可自由行走的无障碍区域。实验硬件配置为13th Gen Intel(R) Core(TM) i9−13900K 3.00 GHz处理器、12 GiB的NVIDIA RTX A2000 GPU、Windows10操作系统,开发环境为Matlab。实验采用运输机器人避障路径距离和到达目标点的搜索时间对IM−RL算法进行性能评估。
3.1.2 不同奖励权重下机器人静态避障仿真实验
为获得IM−RL算法的内在动机取向函数的奖励权重ξ和外部动机奖励函数的奖励权重η,进行机器人静态避障仿真实验,避障路径如图3所示,数据见表1。可看出,当ξ=0.95,η=0.05时,外部奖励权重较低,机器人识别外部环境障碍物和目标点的能力相对较弱,在搜寻目标位置时出现识别准确度低的情况;当ξ=0.85,η=0.15时,外部奖励权重较高,机器人识别外部环境障碍物和目标点的能力相对较强,导致机器人远距离躲避障碍物,进而出现冗余路径。当ξ=0.9,η=0.1时,机器人避障路径最优。
![]() 图 3 不同奖励权重下机器人静态避障路径Figure 3. Static obstacle avoidance paths of robot under different reward weights表 1 不同奖励权重下机器人静态避障仿真数据Table 1. Simulation data of robot static obstacle avoidance under different reward weights
图 3 不同奖励权重下机器人静态避障路径Figure 3. Static obstacle avoidance paths of robot under different reward weights表 1 不同奖励权重下机器人静态避障仿真数据Table 1. Simulation data of robot static obstacle avoidance under different reward weights奖励权重 路径距离/m 搜索时间/s ξ=0.95,η=0.05 76.59 — ξ=0.85,η=0.15 73.53 6.56 ξ=0.90,η=0.10 56.70 5.68 3.1.3 不同算法下机器人静态避障仿真实验
IM−RL算法、CNN算法、混合A*算法和改进A*−DWA算法下机器人静态避障仿真结果见表2。可看出在静态环境中,与CNN算法、混合A*算法和改进A*−DWA算法相比,IM−RL算法的避障路径距离分别缩短了4.26%,3.16%和1.73%,搜索时间分别缩短了80.70%,63.33%和46.57%,IM−RL算法的效率更高。
表 2 不同算法下机器人静态避障仿真实验数据Table 2. Simulation experiment data of robot static obstacle avoidance under different algorithms算法 路径距离/m 搜索时间/s CNN 59.22 29.42 混合A* 58.55 15.49 改进A*−DWA 57.70 10.63 IM−RL 56.70 5.68 3.2 动态环境下机器人自主避障仿真实验
3.2.1 不同奖励权重下机器人动态避障仿真实验
在静态障碍物仿真环境的基础上增加0.4 m×0.4 m的正方形作为动态未知障碍物,其他参数不变。IM−RL算法的内在动机取向函数的奖励权重ξ和外部动机奖励函数的奖励权重η取值不同时,机器人动态避障路径如图4所示,数据见表3。可看出,当ξ=0.95,η=0.05时,外部奖励权重较低,机器人识别外部环境障碍物和目标点的能力相对较弱,在搜寻目标位置时出现识别准确度低的情况;当ξ=0.85,η=0.15时,外部奖励权重较高,机器人识别外部环境障碍物和目标点的能力相对较强,导致机器人远距离躲避障碍物,进而出现冗余路径。当ξ=0.9,η=0.1时,机器人避障路径最优。
![]() 图 4 不同奖励权重下机器人动态避障路径Figure 4. Dynamic obstacle avoidance paths of robot under different reward weights表 3 不同奖励权重下机器人动态避障仿真实验数据Table 3. Simulation experiment data of robot dynamic obstacle avoidance under different reward weights
图 4 不同奖励权重下机器人动态避障路径Figure 4. Dynamic obstacle avoidance paths of robot under different reward weights表 3 不同奖励权重下机器人动态避障仿真实验数据Table 3. Simulation experiment data of robot dynamic obstacle avoidance under different reward weights奖励权重 路径距离/m 搜索时间/s ξ=0.95,η=0.05 76.44 13.43 ξ=0.85,η=0.15 82.21 12.39 ξ=0.90,η=0.10 58.28 9.12 3.2.2 不同算法下机器人动态避障仿真实验
IM−RL算法、CNN算法、混合A*算法和改进A*−DWA算法下机器人动态避障路径如图5所示,数据见表4。可看出在存在未知障碍物的动态环境中,与CNN算法、混合A*算法和改进A*−DWA算法相比,IM−RL算法的避障路径距离分别缩短了23.32%,18.99%和12.98%,搜索时间分别缩短了75.06%,72.51%和70.83%;IM−RL算法下机器人能实时、有效避开动态障碍物,表明IM−RL算法具有较高的鲁棒性。
![]() 图 5 不同算法下机器人动态避障路径Figure 5. Dynamic obstacle avoidance paths of robot under different algorithms表 4 不同算法下机器人动态避障仿真实验数据Table 4. Simulation experiment data of robot dynamic obstacle avoidance under different algorithms
图 5 不同算法下机器人动态避障路径Figure 5. Dynamic obstacle avoidance paths of robot under different algorithms表 4 不同算法下机器人动态避障仿真实验数据Table 4. Simulation experiment data of robot dynamic obstacle avoidance under different algorithms算法 路径距离/m 搜索时间/s CNN 76.00 36.57 混合A* 71.94 33.18 改进A*−DWA 66.97 31.26 IM−RL 58.28 9.12 4. 煤矿井下环境中机器人自主避障实验
由于煤矿井下环境黑暗,在机器人前端安装2个LED补光灯进行照明。在煤矿井下环境中,IM−RL算法、CNN算法、混合A*算法和改进A*−DWA算法下机器人避障路径如图6所示,数据见表5。可看出在煤矿井下环境中出现未知障碍物时,IM−RL算法和改进A*−DWA算法能够实现实时避障;而CNN算法和混合A*算法会出现与障碍物碰撞的情况;改进A*−DWA算法虽然能够实时避开障碍物顺利达到目标点,但其路径较长,影响运输效率;与CNN算法、混合A*算法和改进A*−DWA算法相比,IM−RL算法的避障路径距离分别缩短了9.41%,8.17%和14.49%,搜索时间分别缩短了79.65%,78.58%和76.43%;IM−RL算法下机器人能实时、有效避开未知障碍物,表明IM−RL算法泛化性能好。
![]() 图 6 煤矿井下环境中不同算法下机器人避障路径Figure 6. Obstacle avoidance paths of robot under different algorithms in coal mine underground environment表 5 煤矿井下环境中不同算法下机器人避障实验数据Table 5. Experimental data of robot obstacle avoidance under different algorithms in coal mine underground environment
图 6 煤矿井下环境中不同算法下机器人避障路径Figure 6. Obstacle avoidance paths of robot under different algorithms in coal mine underground environment表 5 煤矿井下环境中不同算法下机器人避障实验数据Table 5. Experimental data of robot obstacle avoidance under different algorithms in coal mine underground environment算法 路径距离/m 搜索时间/s CNN 63.24 57.36 混合A* 62.39 54.47 改进A*−DWA 67.00 49.52 IM−RL 57.29 11.67 5. 结论
1) 运输机器人利用视觉传感器感知外界环境信息,利用基于好奇心的内在动机取向函数计算运输机器人判断外界环境物体属性的内部奖赏值,结合运输机器人动作属性的外部奖赏值和奖励权重,计算运输机器人的综合奖赏值,激励运输机器人主动探索未知环境,使其向自身的记忆机制中存储知识和经验,通过不断的学习训练实现井下运输机器人自主避障。
2) 静态环境和动态环境下运输机器人自主避障仿真实验结果表明,当IM−RL算法的内在动机取向函数的奖励权重ξ=0.90、外部动机奖励函数的奖励权重η=0.10时,运输机器人避障路径和搜索时间均达到最优。
3) 在静态环境、存在未知障碍物动态环境和煤矿井下环境中,IM−RL算法具有较高的鲁棒性、泛化性和实时性,自主避障效果优于CNN算法、混合A*算法和改进A*−DWA算法。
-
![]()
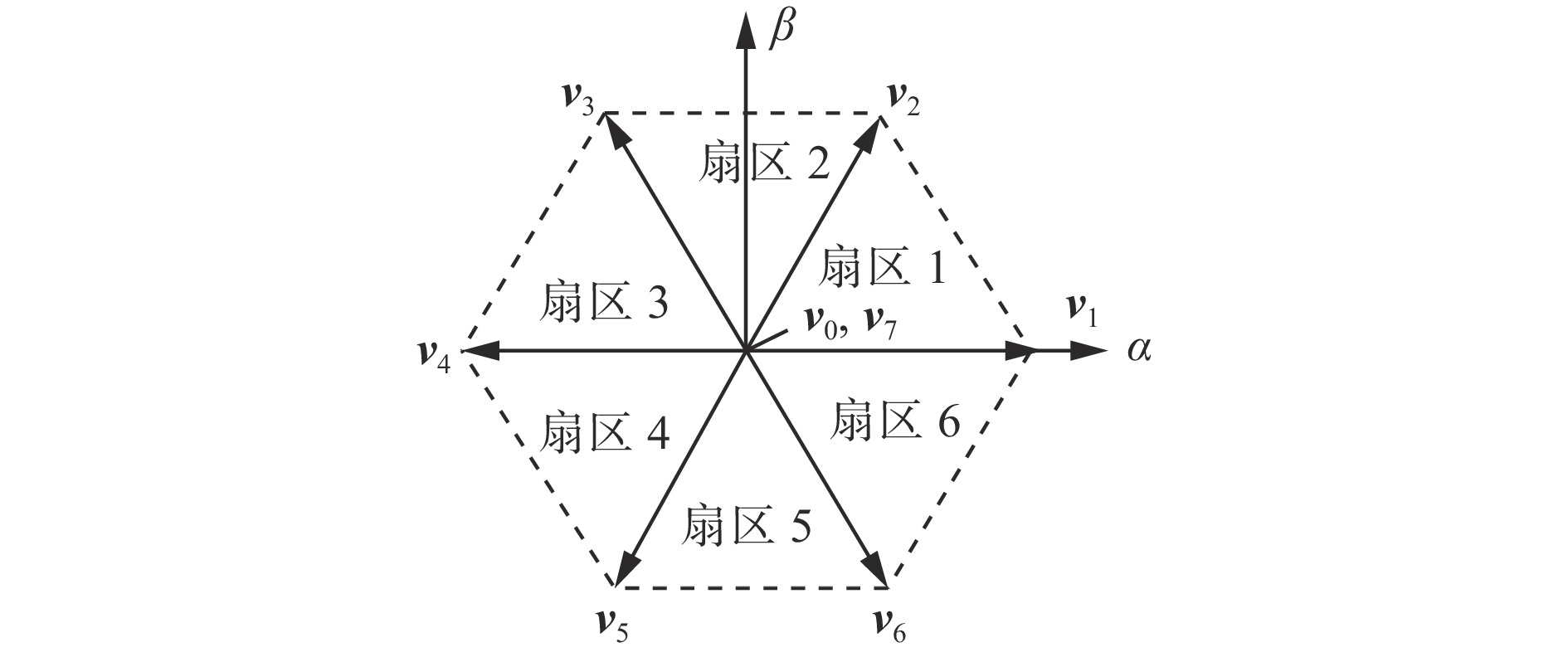
图 2 两电平STATCOM扇区及开关矢量分布
Figure 2. Sector and switching vector distribution of two-level ofstatic synchronous compensator
![]()
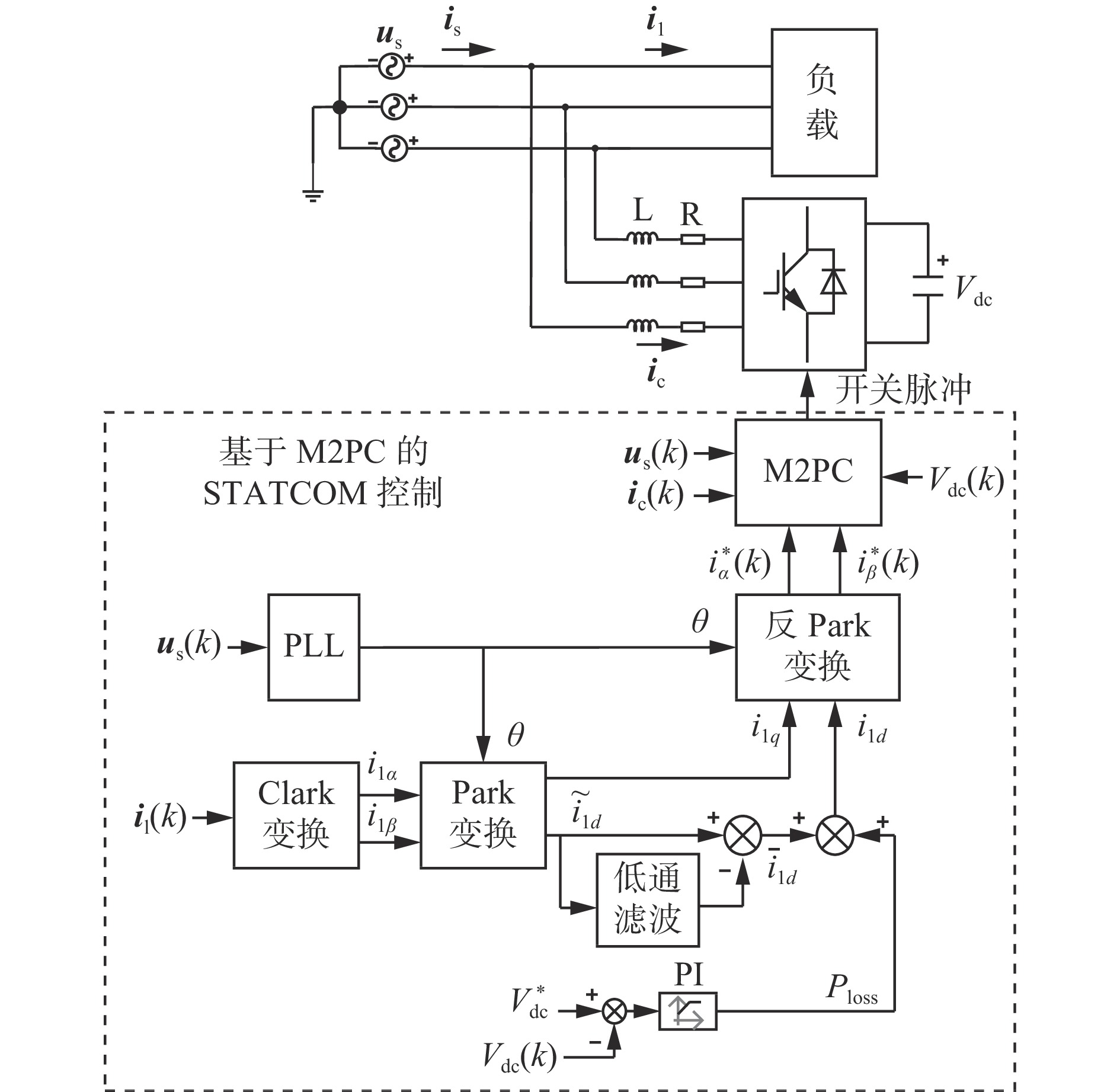
图 4 基于M2PC的STATCOM控制原理
Figure 4. Control principle of static synchronous compensator based on modulated model predictive control
![]()
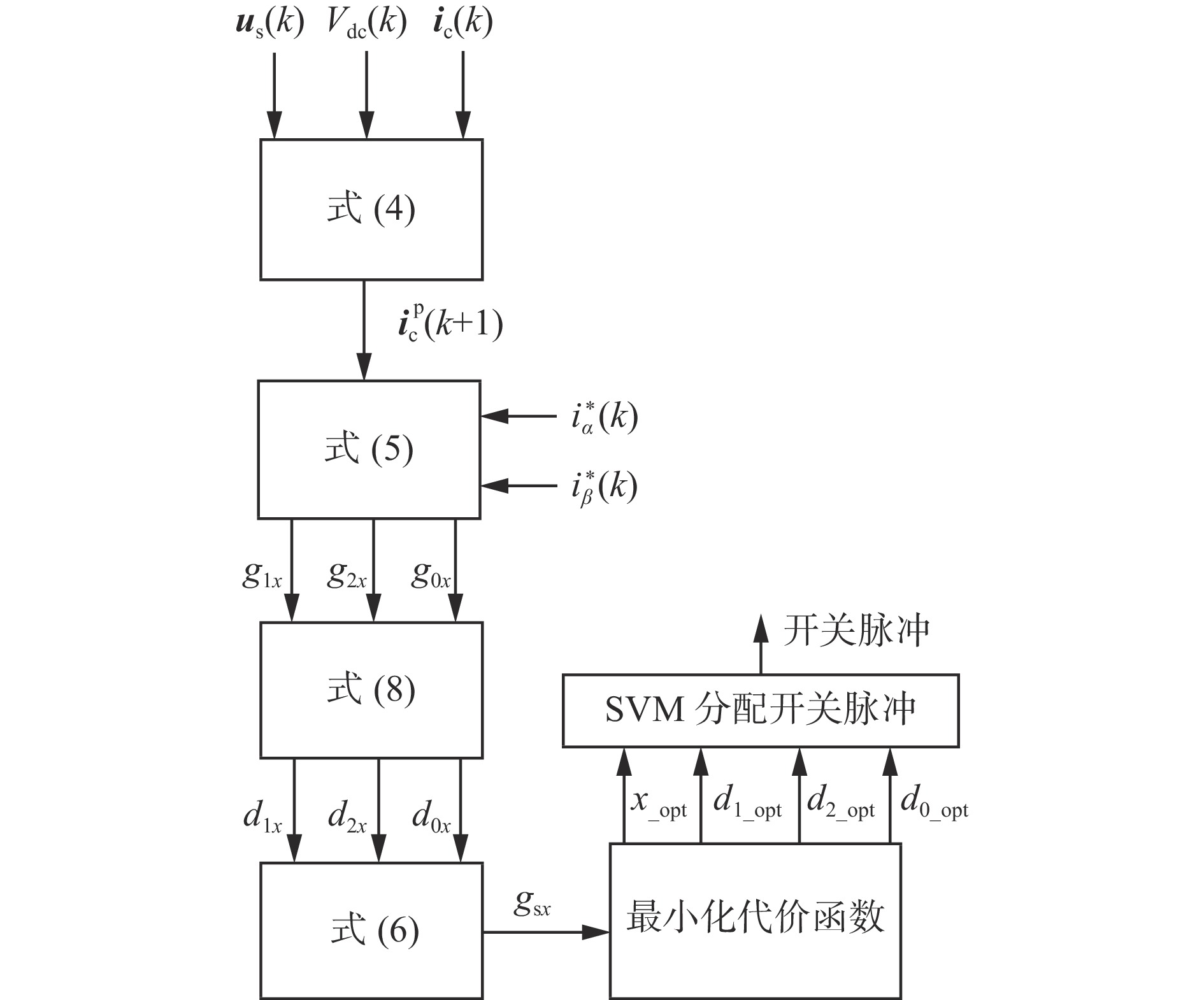
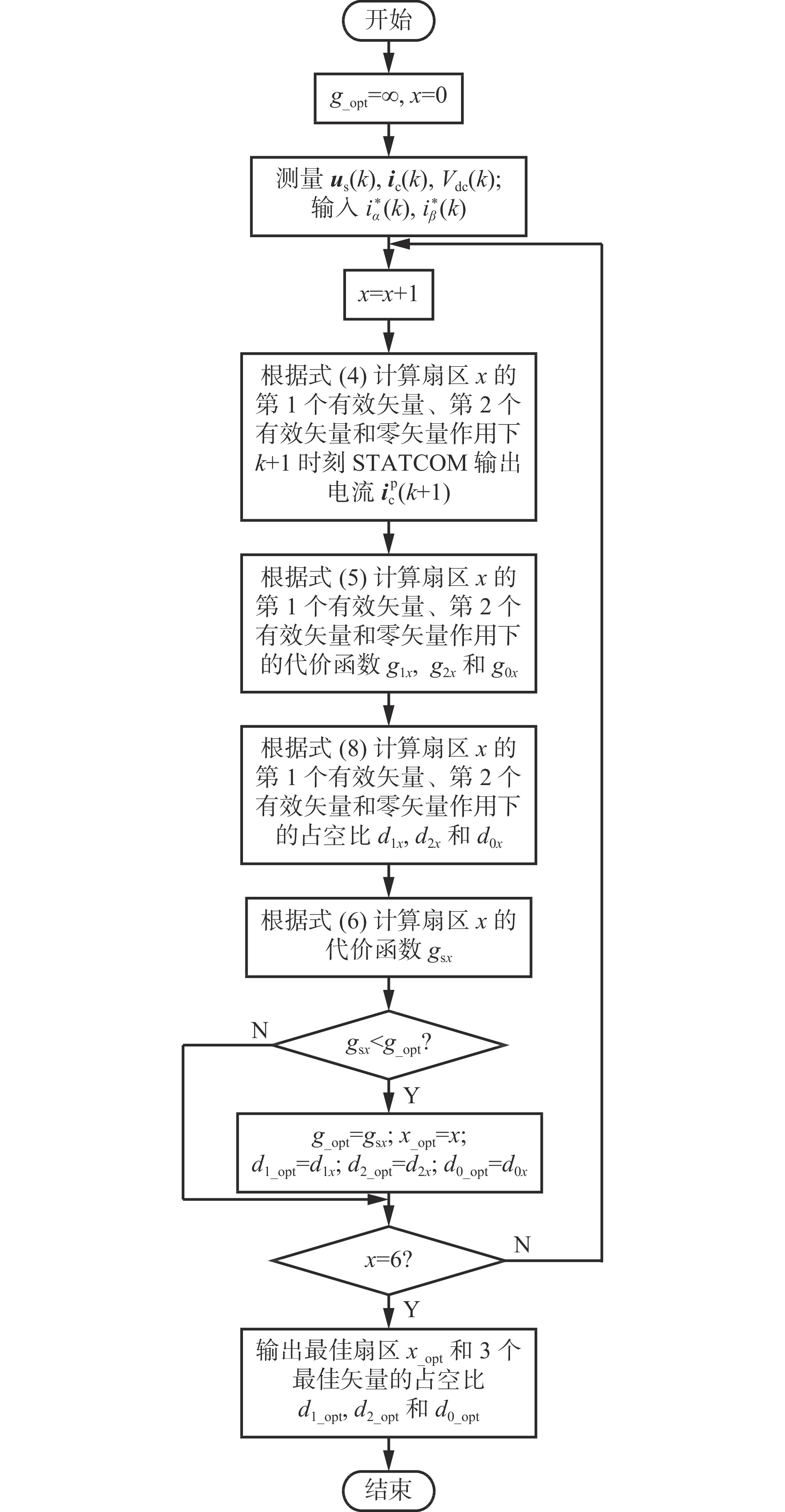
图 5 基于M2PC的STATCOM控制流程
Figure 5. Control process of static synchronous compensator based on modulated model predictive control
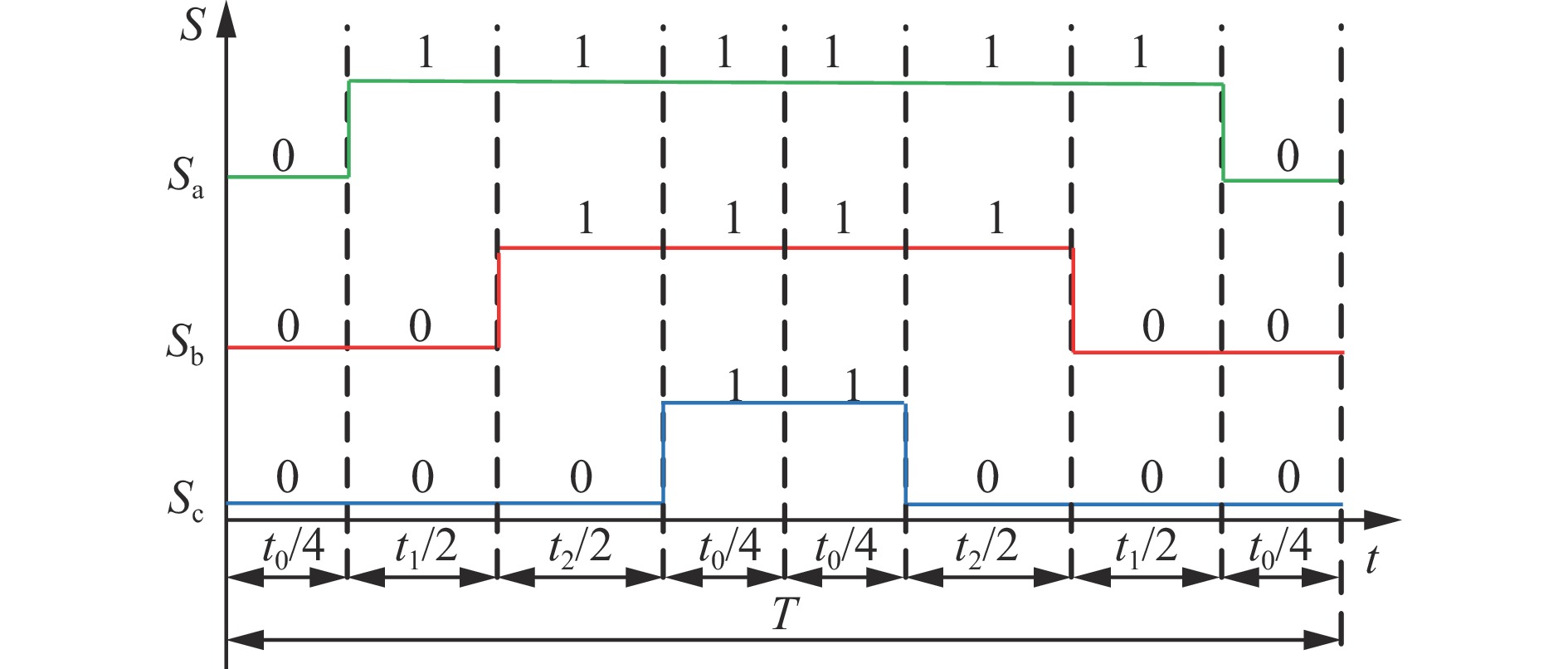
![]()
图 6 M2PC脉冲分配(扇区1)
Figure 6. Pulse distribution of modulated model predictive control(sector 1)
![]()
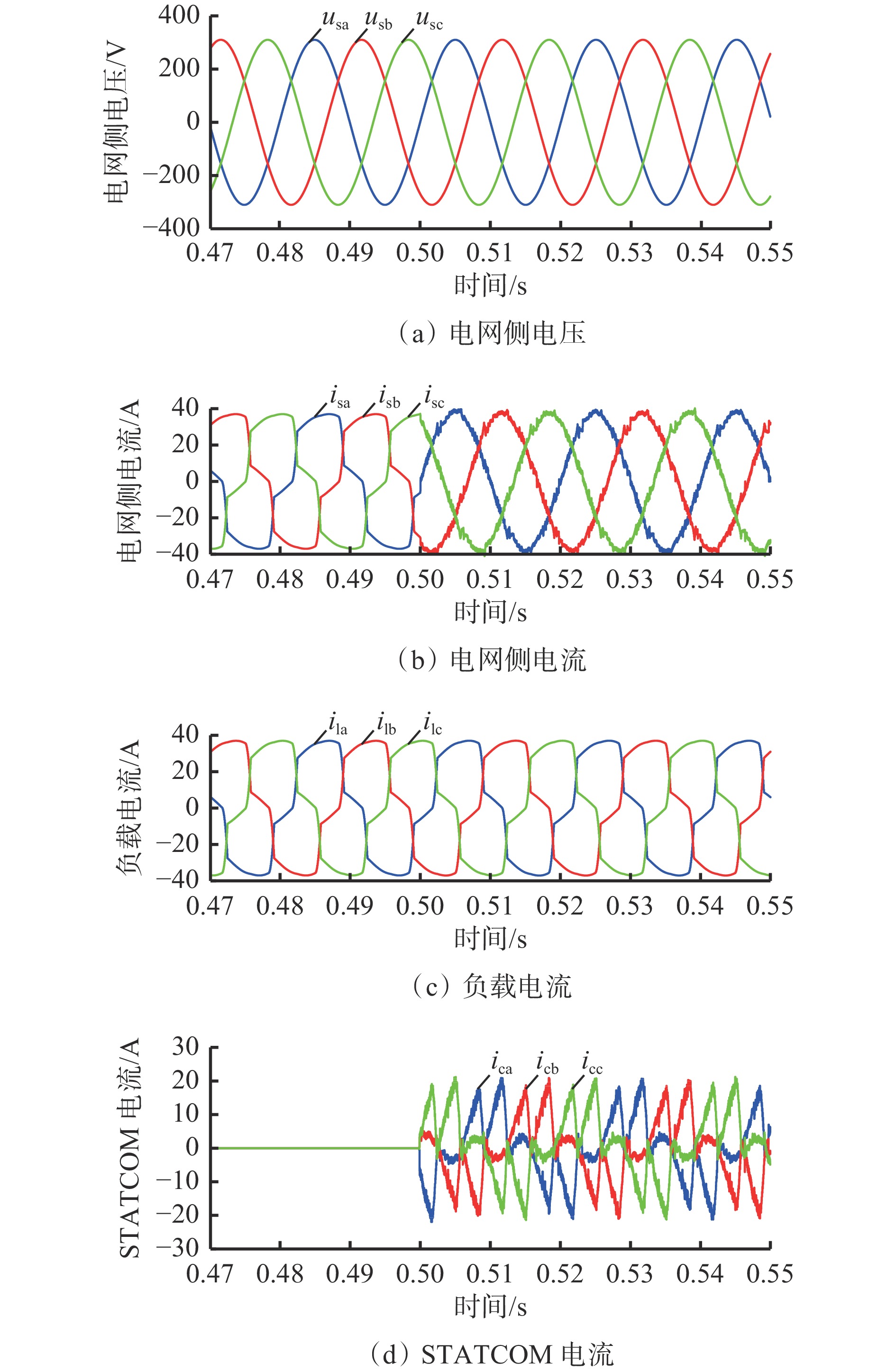
图 7 投入STATCOM前后电压、电流仿真波形
Figure 7. Simulation waveforms of voltage and current before and after adopting static synchronous compensator
![]()
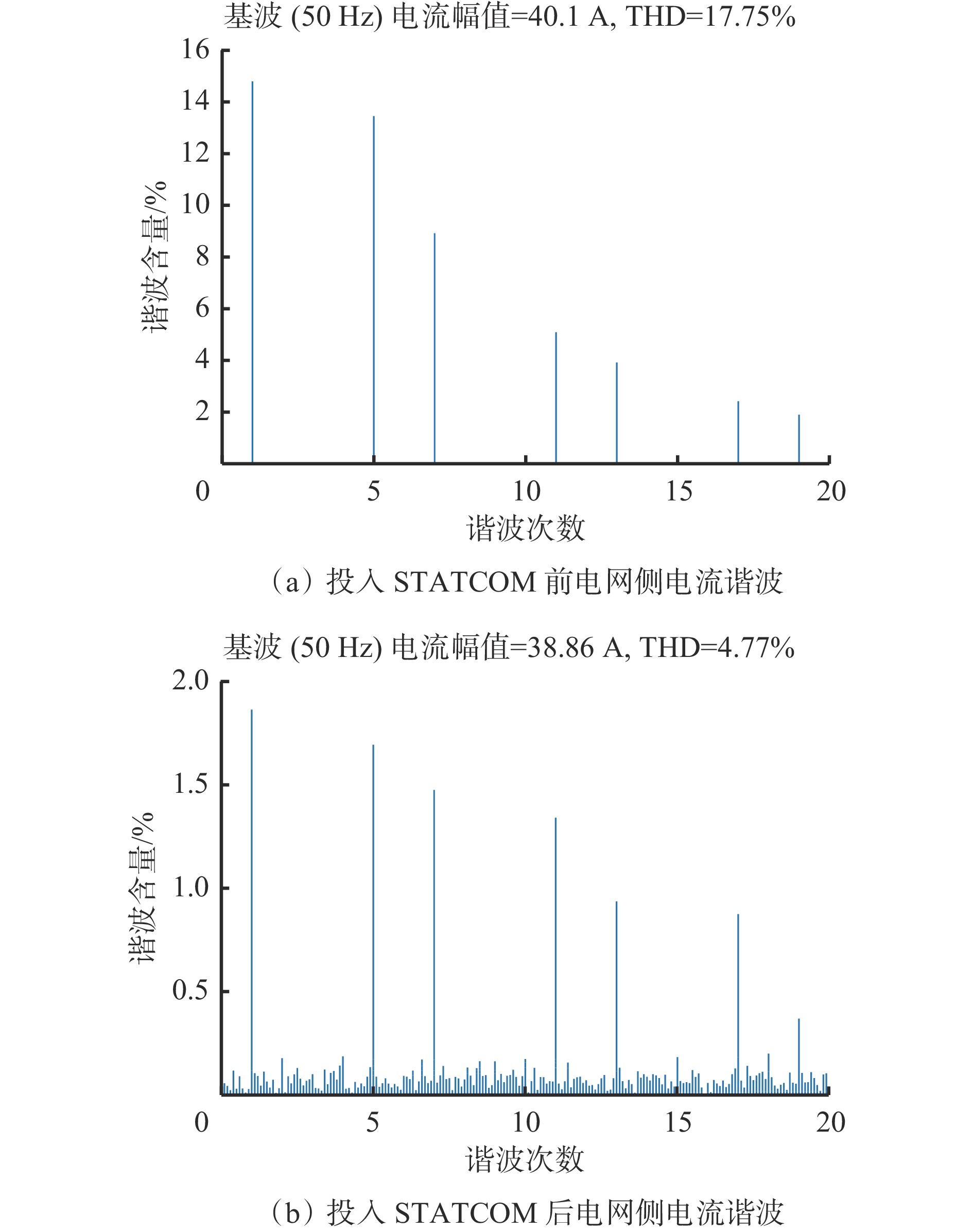
图 8 投入STATCOM前后电网侧电流谐波仿真波形
Figure 8. Simulation waveforms of grid side current harmonics before and after adopting static synchronous compensator
![]()
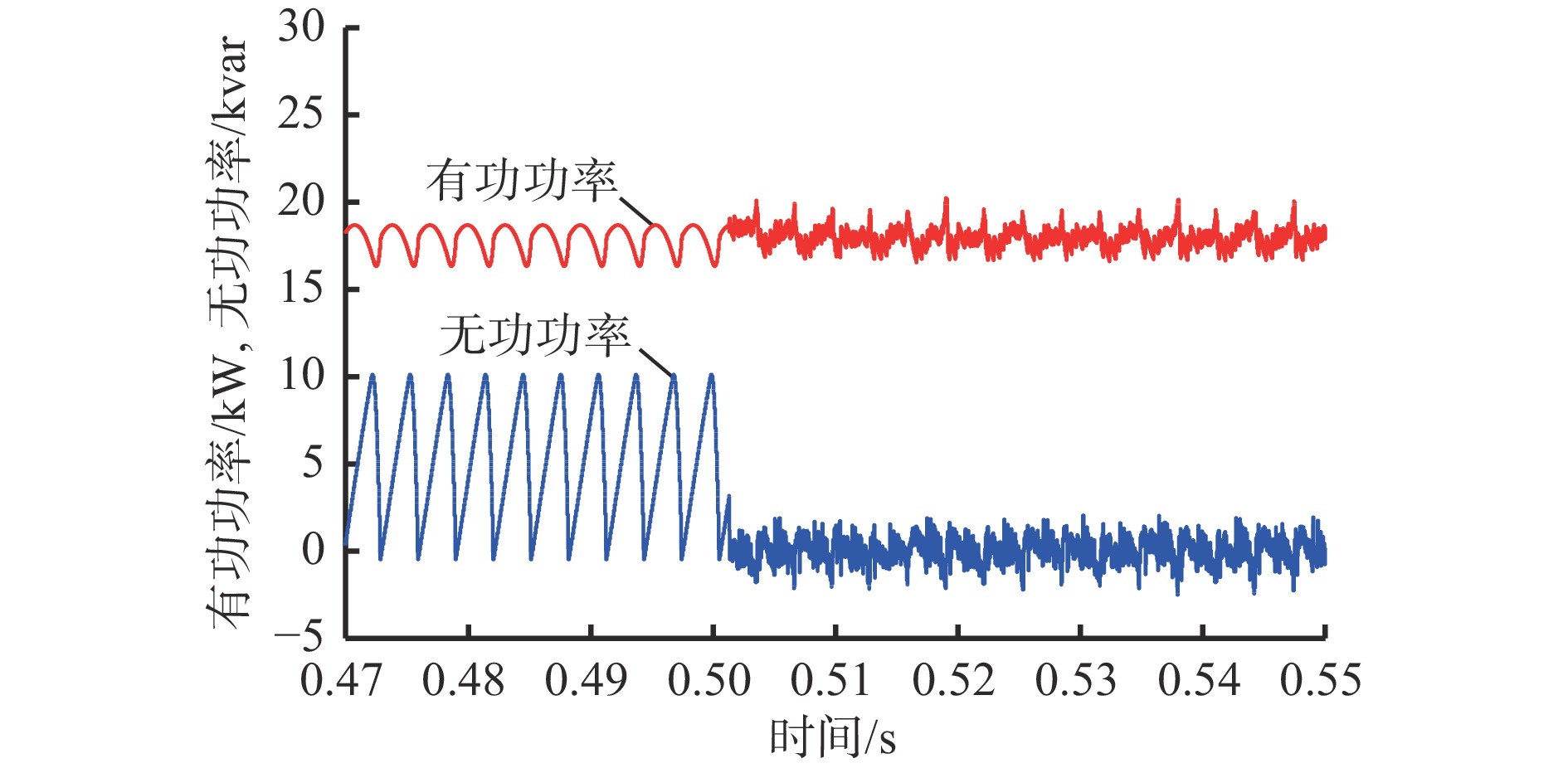
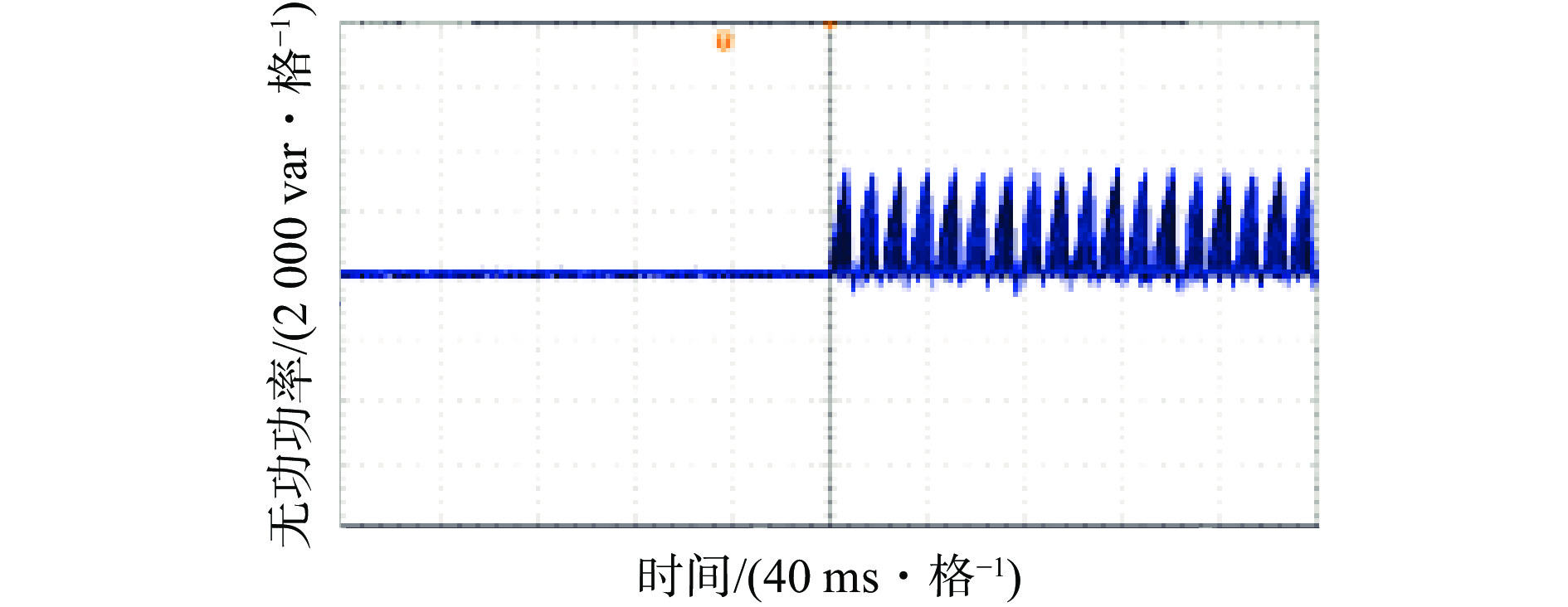
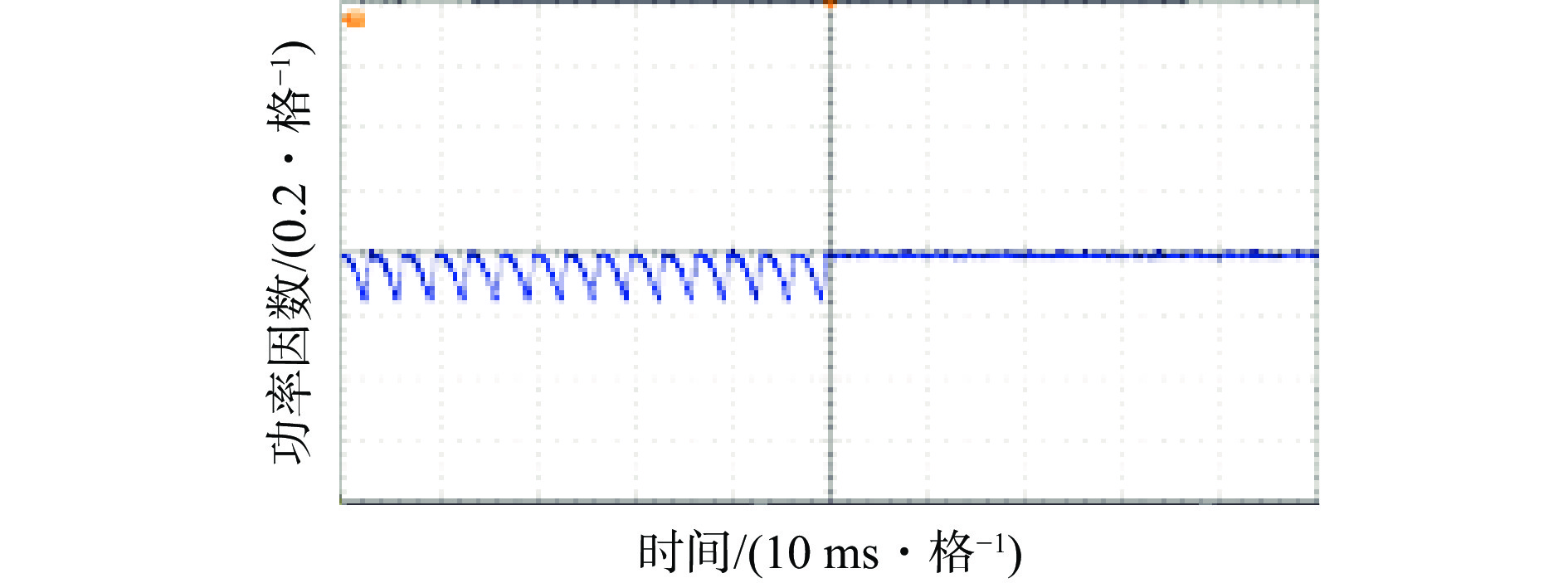
图 9 投入STATCOM前后电网侧有功功率和无功功率仿真波形
Figure 9. Simulation waveforms of grid side active and reactive power before and after adopting static synchronous compensator
![]()
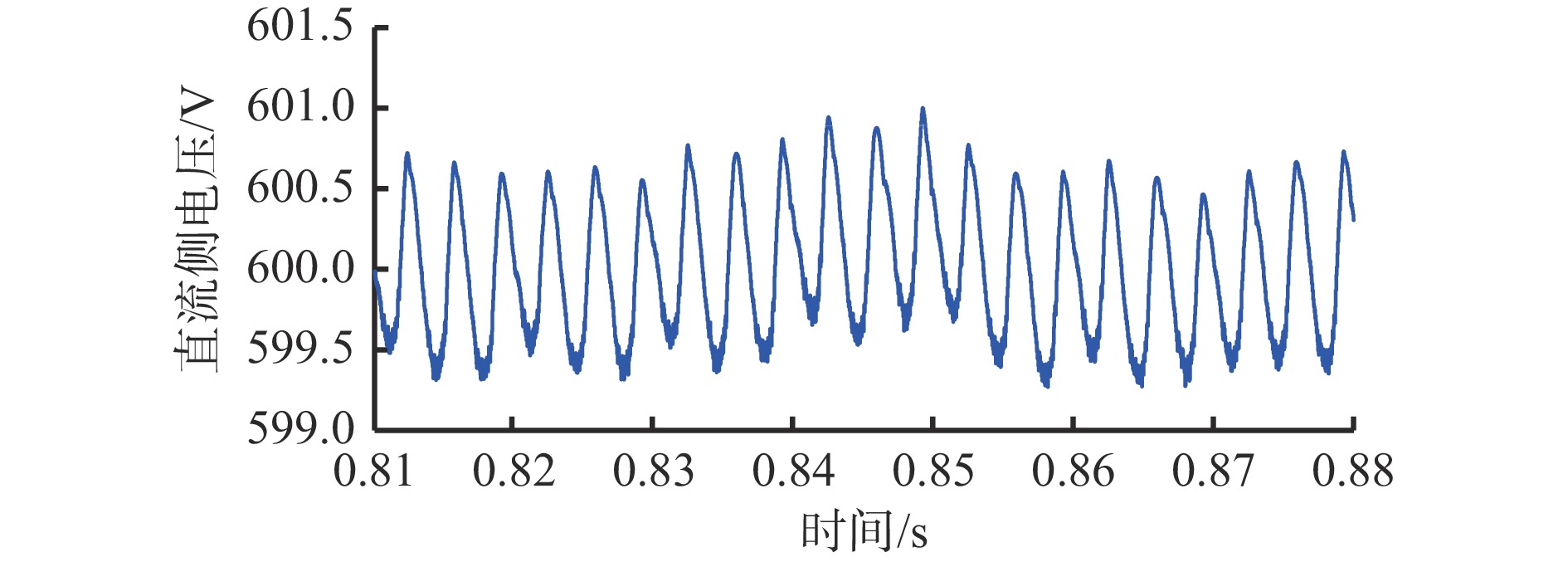
图 10 投入STATCOM后直流侧电压仿真波形
Figure 10. Simulation waveforms of DC-side voltage after adopting static synchronous compensator
![]()
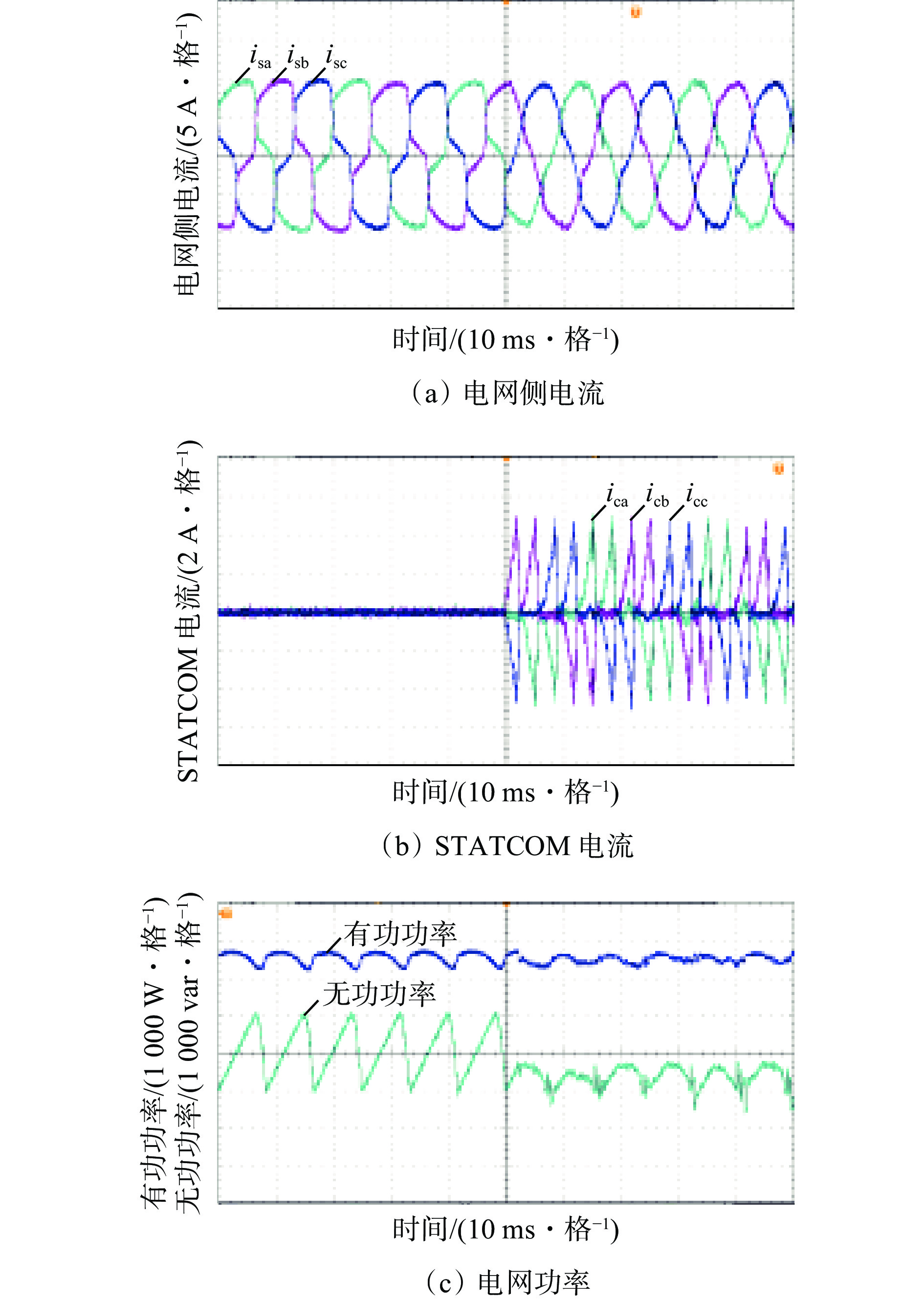
图 12 投入STATCOM前后电流、功率实验波形
Figure 12. Experimental waveforms of current and power before and after adopting static synchronous compensator
![]()
图 13 投入STATCOM前后电网侧电流谐波实验波形
Figure 13. Experimental waveforms of grid side current harmonics before and after adopting static synchronous compensator
![]()
图 14 投入STATCOM后直流侧电压实验波形
Figure 14. Experimental waveforms of DC-side voltage after adopting static synchronous compensator
![]()
图 15 STATCOM发出的无功功率实验波形
Figure 15. Experimental waveforms of reactive power sent by static synchronous compensator
表 1 STATCOM开关状态及开关矢量
Table 1 Switching status and switching vector ofstatic synchronous compensator
Sa Sb Sc 开关矢量 0 0 0 v0=0 1 0 0 v1=2Vdc/3 1 1 0 v2=Vdc/3+j$ \sqrt{3} $Vdc/3 0 1 0 v3=−Vdc/3+j$ \sqrt{3} $Vdc/3 0 1 1 v4=−2Vdc/3 0 0 1 v5=−Vdc/3−j$ \sqrt{3} $Vdc/3 1 0 1 v6=Vdc/3−j$ \sqrt{3} $Vdc/3 1 1 1 v7=0  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数
Table 2 Simulation parameters
参数 值 电网线电压/V 380 滤波电感/mH 2 滤波电感阻值/Ω 0.1 直流侧电压/V 600 直流侧电容/μF 2 200 采样频率/kHz 20 开关频率/kHz 10 负载侧电阻/Ω 20
下载: 导出CSV
表 3 实验参数
Table 3 Experimental parameters
参数 值 电网线电压/V 380 滤波电感/mH 5 滤波电阻/Ω 0.1 直流侧电压/V 600 直流侧电容/μF 2 200 采样频率/kHz 20 开关频率/kHz 10 负载侧电阻/Ω 60
下载: 导出CSV
-
[1] 王清亮,姚苗. 煤矿电能质量综合量化评价研究[J]. 工矿自动化,2015,41(2):42-46. WANG Qingliang,YAO Miao. Research of comprehensive quantitative evaluation of power quality of coal mine[J]. Industry and Mine Automation,2015,41(2):42-46.
[2] 王毅颖. 煤矿电网多谐波源分散抑制和APFs接入点优化研究[D]. 北京:中国矿业大学(北京),2017. WANG Yiying. Optimization research on distributed suppressing harmonic sources and placements of APFs in coal mine power grid[D]. Beijing:China University of Mining and Technology-Beijing,2017.
[3] 郭松梅. 煤矿电能质量综合治理研究[J]. 工矿自动化,2016,42(9):60-64. GUO Songmei. Research on power quality comprehensive treatment for coal mine[J]. Industry and Mine Automation,2016,42(9):60-64.
[4] 杨磊. 董家河煤矿电能质量测试分析与治理研究[D]. 西安:西安科技大学,2018. YANG Lei. Research on test analysis and treatment on power quality of Dongjiahe Coal Mine[D]. Xi'an:Xi'an University of Science and Technology,2018.
[5] 张淼,吴事煜,冯春寿,等. 一种新型谐振混合型有源电力滤波器[J]. 电力电子技术,2023,57(4):41-45. DOI: 10.3969/j.issn.1000-100X.2023.04.010 ZHANG Miao,WU Shiyu,FENG Chunshou,et al. A new resonant hybrid active power filter[J]. Power Electronics,2023,57(4):41-45. DOI: 10.3969/j.issn.1000-100X.2023.04.010
[6] 刘伟豪. 电网T型三电平静止无功补偿器的仿真与设计[J]. 电工技术,2018(19):41-44,47. LIU Weihao. Simulation and design of T type three level static var compensator in power grid[J]. Electric Engineering,2018(19):41-44,47.
[7] 韩冰,张宁宇,胡昊明,等. 考虑UPFC实时控制策略的电网功率调节能力研究[J]. 电力工程技术,2018,37(1):1-7. HAN Bing,ZHANG Ningyu,HU Haoming,et al. Control capability analysis of unified power flow controller considering real-time control strategy[J]. Electric Power Engineering Technology,2018,37(1):1-7.
[8] 祁琦,王宇,盛晓东,等. 基于串并联混合结构的动态电压恢复器研究[J]. 电工技术,2022(7):27-30. QI Qi,WANG Yu,SHENG Xiaodong,et al. Study on dynamic voltage restore based on series parallel hybrid structure[J]. Electric Engineering,2022(7):27-30.
[9] 刘威,季振东,孙毅超,等. 基于双频功率回路的星形级联H桥STATCOM不平衡补偿研究[J]. 中国电机工程学报,2023,43(9):3527-3538. LIU Wei,JI Zhendong,SUN Yichao,et al. Research on unbalance current compensation of star-connected cascaded H-bridge STATCOM based on dual-frequency power loop[J]. Proceedings of the CSEE,2023,43(9):3527-3538.
[10] 王明达,梁军,王广柱,等. 基于单星MMC的新型STATCOM及其控制策略[J]. 电力系统自动化,2015,39(18):108-113. WANG Mingda,LIANG Jun,WANG Guangzhu,et al. Control strategy of novel STATCOM based on modular multilevel converter with single-star configuration[J]. Automation of Electric Power Systems,2015,39(18):108-113.
[11] 秦祥栋,罗朋,王占立. 井下 1 140 V级联STATCOM关键技术的研究[J]. 煤炭技术,2014,33(10):212-214. QIN Xiangdong,LUO Peng,WANG Zhanli. Research on underground 1 140 V cascade STATCOM key technologies[J]. Coal Technology,2014,33(10):212-214.
[12] 赵建阳,张福民,龚博,等. 基于D−STATCOM 的煤矿供电系统功率平衡控制方法[J]. 煤炭学报,2017,42(增刊1):288-294. ZHAO Jianyang,ZHANG Fumin,GONG Bo,et al. Power balance control method based on D-STATCOM in coal mine power supply system[J]. Journal of China Coal Society,2017,42(S1):288-294.
[13] 王烨,牟宪民,齐琛. 三相电流源型STATCOM 的无锁相环控制策略[J]. 电力系统保护与控制,2015,43(14):131-136. WANG Ye,MU Xianmin,QI Chen. A control strategy of three-phase current source converter based STATCOM without PLL[J]. Power System Protection and Control,2015,43(14):131-136.
[14] 易桂平,胡仁杰,蒋玮,等. 电网电压不平衡对STATCOM的影响及抑制[J]. 电工技术学报,2014,29(6):238-247. YI Guiping,HU Renjie,JIANG Wei,et al. Influence of grid voltage unbalance on STATCOM and the countermeasure[J]. Transactions of China Electrotechnical Society,2014,29(6):238-247.
[15] 孙朝霞,张明敏,张晖,等. 配电网储能型 DSTATCOM 电能质量综合补偿策略[J]. 电力系统及其自动化学报,2023,35(4):75-84. SUN Zhaoxia,ZHANG Mingmin,ZHANG Hui,et al. Comprehensive power quality compensation strategy for energy-storage-based DSTATCOM[J]. Proceedings of the CSU-EPSA,2023,35(4):75-84.
[16] 於静,莫修权,徐楠. 矿山高压三电平ANPC变频器预测控制研究[J]. 工矿自动化,2016,42(10):85-90. YU Jing,MO Xiuquan,XU Nan. Research on predictive control for mine high-pressure three-level ANPC inverter[J]. Industry and Mine Automation,2016,42(10):85-90.
[17] 刘春喜,田宝奇,刘志乐,等. NPC型三电平并网逆变器自适应模型预测控制[J]. 电力系统及其自动化学报,2023,35(1):143-151. LIU Chunxi,TIAN Baoqi,LIU Zhile,et al. Adaptive model predictive control for NPC-type three-level grid-connected inverter[J]. Proceedings of the CSU-EPSA,2023,35(1):143-151.
[18] 王明金,苗长新,段森,等. 五电平级联H桥STATCOM改进模型预测电流控制[J]. 电力电子技术,2019,53(9):56-59. WANG Mingjin,MIAO Changxin,DUAN Sen,et al. Five-level cascade H-bridge STATCOM improved model predictive current control[J]. Power Electronics,2019,53(9):56-59.
[19] 李帅虎,向振宇,彭寒梅,等. 基于模型预测控制的SVC与STATCOM协调控制器[J]. 电网技术,2019,43(11):4218-4224. LI Shuaihu,XIANG Zhenyu,PENG Hanmei,et al. SVC and STATCOM coordination controller based on model predictive control[J]. Power System Technology,2019,43(11):4218-4224.
[20] 原亚雷,钊翔坤,徐高祥,等. 兼顾电压波动抑制的级联H桥STATCOM相间电压平衡控制策略[J]. 电网技术,2022,46(4):1494-1502. YUAN Yalei,ZHAO Xiangkun,XU Gaoxiang,et al. Clustered voltage balance control strategy of cascaded H-bridge STATCOM with suppressing DC voltage fluctuation[J]. Power System Technology,2022,46(4):1494-1502.
[21] TARISCIOTTI L,ZANCHETTA P,WATSON A,et al. Modulated model predictive control (M2PC) for a 3-phase active front-end[C]. IEEE Energy Conversion Congress and Exposition,Denver,2013:1062-1069.







计量
- 文章访问数: 622
- HTML全文浏览量: 66
- PDF下载量: 25
