
Straightness solution of the fully mechanized working face based on VR and DT technology
-
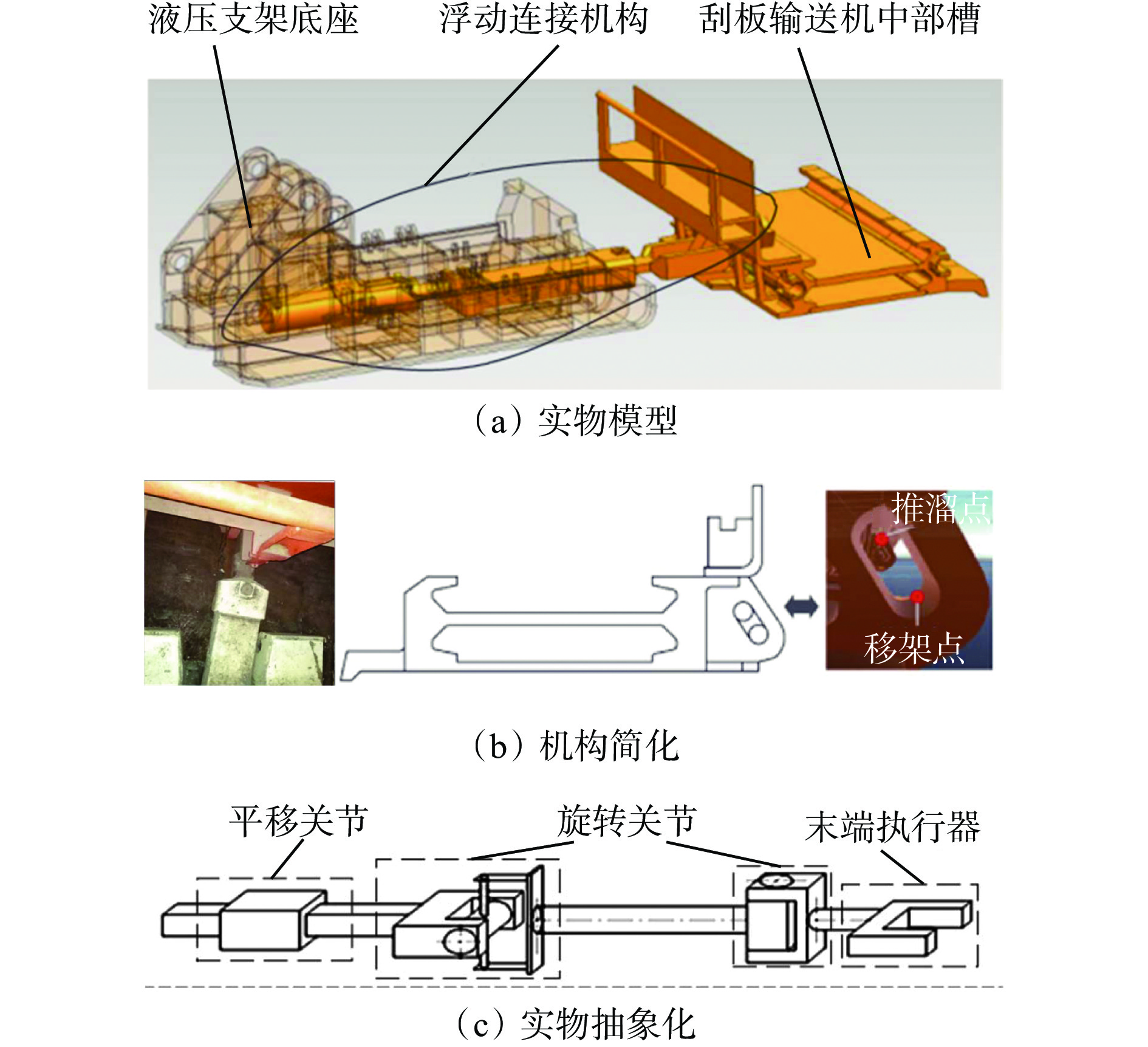
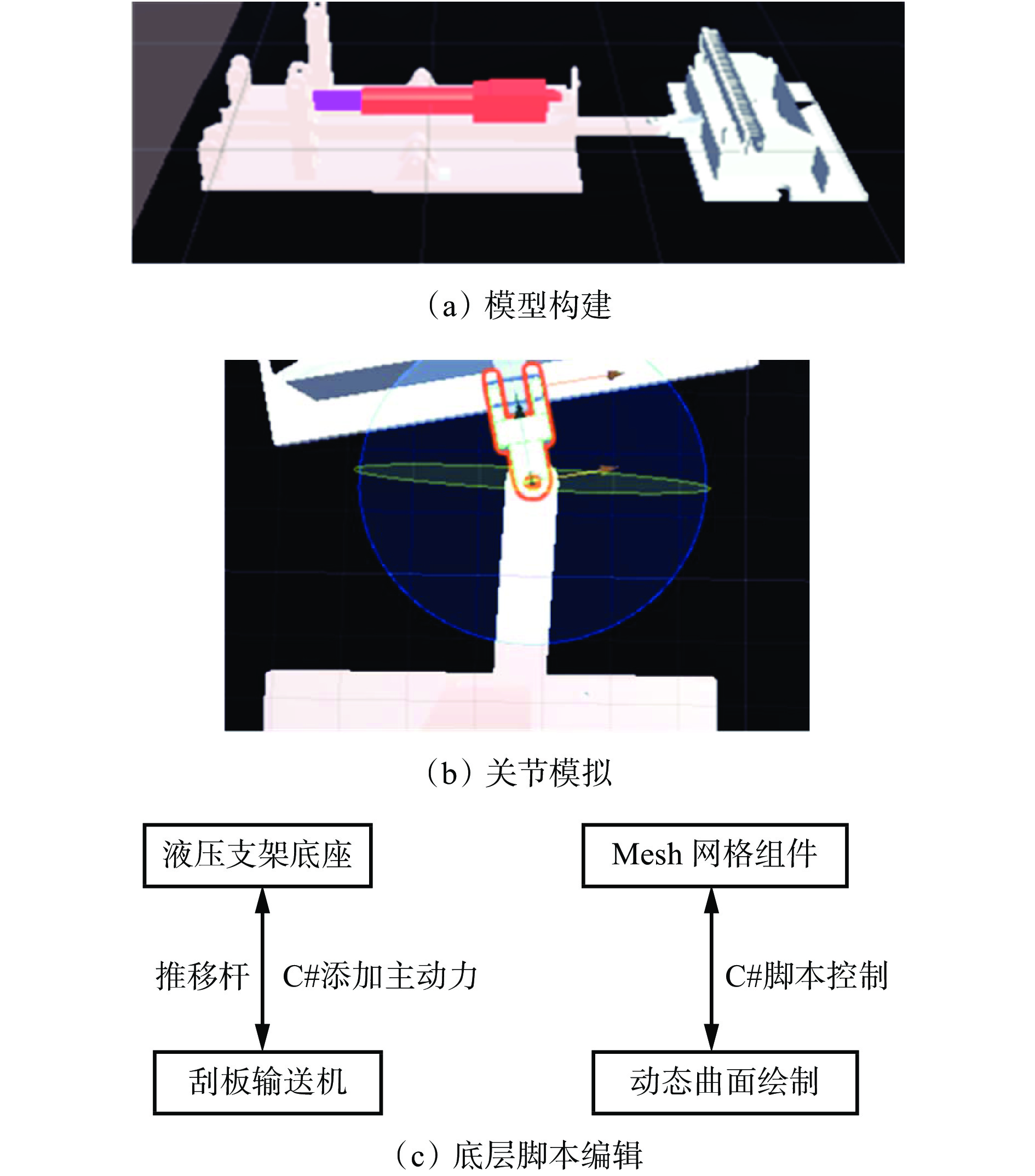
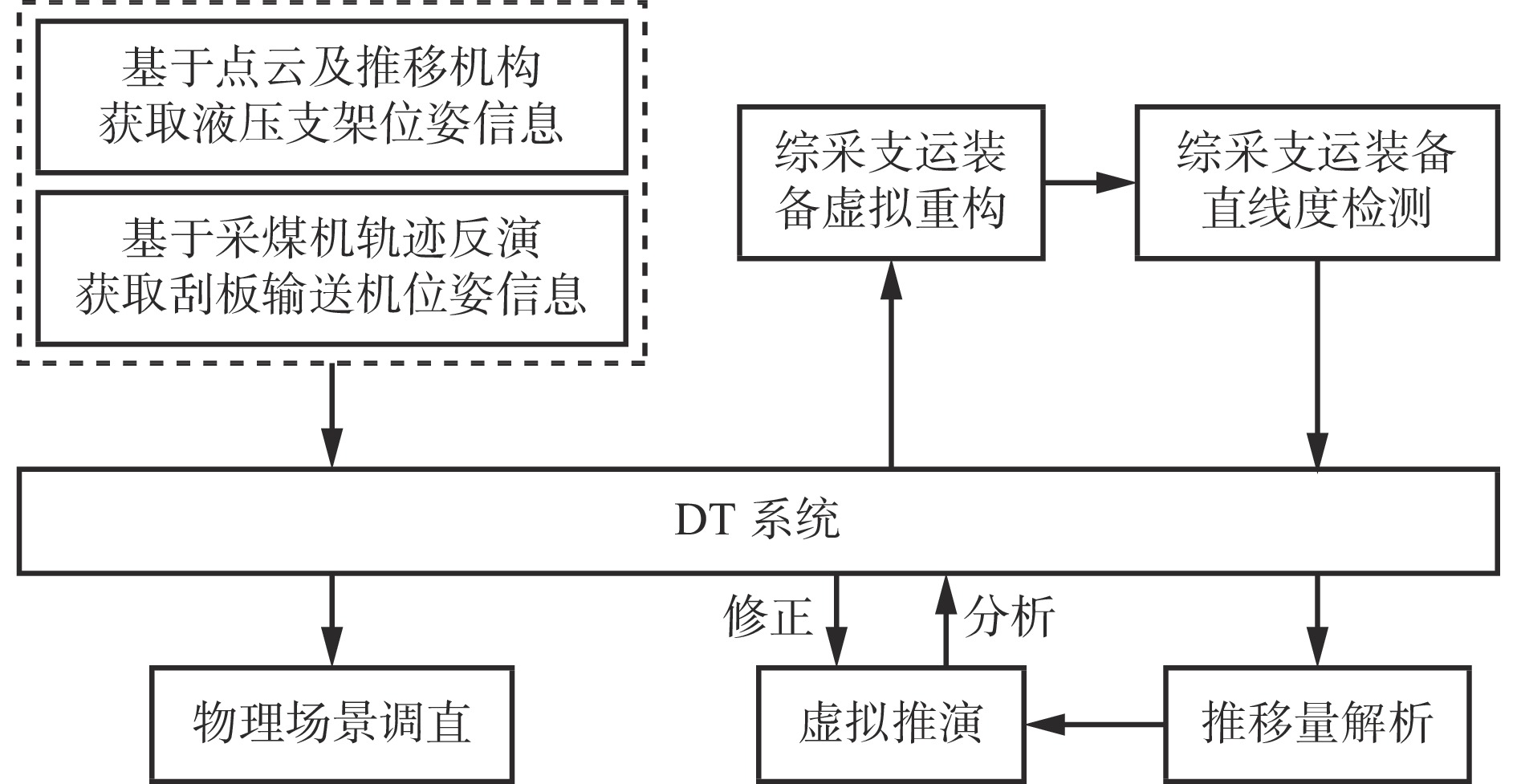
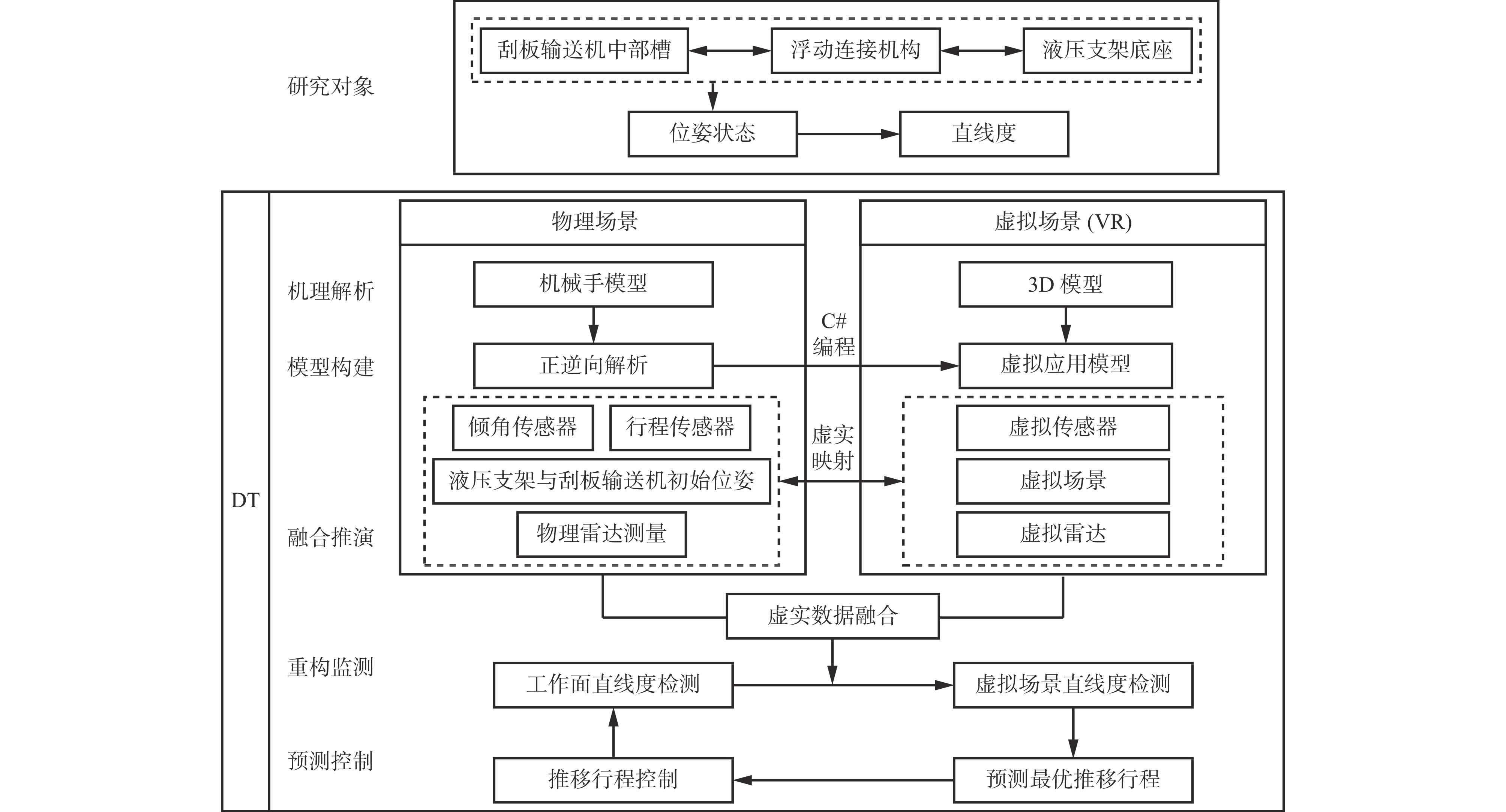
摘要: 直线度问题是综采工作面智能化建设的卡脖子问题之一,解决该问题的关键在于刮板输送机或者液压支架群的位姿获取。目前针对综采工作面直线度的研究大多是对液压支架和刮板输送机的直线度分别进行讨论,存在成本高、实现困难等问题。针对该问题,基于虚拟现实(VR)与数字孪生(DT)技术对综采工作面直线度求解方法进行探索,将液压支架、浮动连接机构、刮板输送机看作一个系统来进行整体考虑,搭建了综采工作面直线度求解框架,主要分为机理解析、模型构建、融合推演、重构监测、预测控制5个步骤。指出综采支运装备相对位置关系分析的关键在于连接液压支架底座与刮板输送机的浮动连接机构,根据浮动连接机构的运动特性将其简化为机器人模型,进行正逆向运动解析;依据真实的煤层环境,在Unity3D中建立基于关节的综采支运装备运动仿真模型,构建VR场景,实现虚实映射;通过非接触式视觉传感器、虚拟传感器、虚实融合等技术,融合传感器及点云信息进行支运装备位姿推演;利用虚实交互技术,联合真实物理场景构建DT系统,实现综采工作面虚拟监测;在虚拟场景中对保证直线度所需的推移行程进行预测,并将其反馈至物理场景中进行直线度控制。Abstract: The straightness problem is one of the neck problems in the intelligent construction of the fully mechanized working face. The key to solve this problem is to obtain the position and posture of the scraper conveyor or hydraulic support group. At present, most of the research on the straightness of fully mechanized working face is to discuss the straightness of hydraulic support and scraper conveyor separately. There are problems such as high cost and difficulty in implementation. In order to solve this problem, based on virtual reality(VR) and digital twin(DT) technology, the method to solve the straightness problem of the fully mechanized working face is explored. The hydraulic support, floating connection mechanism and scraper conveyor are considered as a whole system. The straightness solution framework of the fully mechanized working face is built. There are mainly five steps: mechanism analysis, model construction, fusion deduction, reconstruction monitoring and predictive control. It is pointed out that the key to the analysis of the relative position relationship of the fully mechanized supporting equipment is the floating connection mechanism connecting the hydraulic support base and the scraper conveyor. According to the motion characteristics of the floating connection mechanism, it is simplified into a robot model and solved by forward and reverse motion. According to the real coal seam environment, the motion simulation model of fully mechanized mining support equipment based on joints is established in Unity3D, and the VR scene is constructed to realize virtual and real mapping. Through non-contact visual sensor, virtual sensor, virtual-real fusion and other technologies, the information of sensor and point cloud are fused to perform the position and posture deduction of support equipment. Using the technology of virtual and reality interaction, combined with a real physical scenario, a DT system is constructed to achieve virtual monitoring of the fully mechanized working face. The travel distance required to ensure straightness is predicted in the virtual scene and fed back to the physical scene for straightness control.
-
-
![]()
图 1 基于VR与DT技术的综采工作面直线度求解框架
Figure 1. A framework for solving the straightness of fully mechanized working face based on VR and DT technology
-
[1] 王国法,刘峰,庞义辉,等. 煤矿智能化——煤炭工业高质量发展的核心技术支撑[J]. 煤炭学报,2019,44(2):349-357. WANG Guofa,LIU Feng,PANG Yihui,et al. Coal mine intellectualization:The core technology of high quality development[J]. Journal of China Coal Society,2019,44(2):349-357.
[2] 王国法,任怀伟,庞义辉,等. 煤矿智能化(初级阶段)技术体系研究与工程进展[J]. 煤炭科学技术,2020,48(7):1-27. WANG Guofa,REN Huaiwei,PANG Yihui,et al. Research and engineering progress of intelligent coal mine technical system in early stages[J]. Coal Science and Technology,2020,48(7):1-27.
[3] 刘峰,曹文君,张建明. 持续推进煤矿智能化 促进我国煤炭工业高质量发展[J]. 中国煤炭,2019,45(12):32-36. DOI: 10.3969/j.issn.1006-530X.2019.12.006 LIU Feng,CAO Wenjun,ZHANG Jianming. Continuously promoting the coal mine intellectualization and the high-quality development of China's coal industry[J]. China Coal,2019,45(12):32-36. DOI: 10.3969/j.issn.1006-530X.2019.12.006
[4] PENG S S,DU Feng,CHENG Jingyi,et al. Automation in U. S. longwall coal mining:A state-of-the-art review[J]. International Journal of Mining Science and Technology,2019,29(2):151-159. DOI: 10.1016/j.ijmst.2019.01.005
[5] 中国矿业大学. 煤矿井下综采工作面推进距动态监测仪: 2014100994407[P]. 2014-03-18. China University of Mining and Technology. Dynamic monitor for advance distance of fully mechanized mining face in coal mine: 2014100994407[P]. 2014-03-18.
[6] 方新秋,宁耀圣,李爽,等. 基于光纤光栅的刮板输送机直线度感知关键技术研究[J]. 煤炭科学技术,2019,47(1):152-158. FANG Xinqiu,NING Yaosheng,LI Shuang,et al. Research on key technique of straightness perception of scraper conveyor based on fiber grating[J]. Coal Science and Technology,2019,47(1):152-158.
[7] 张智喆,王世博,张博渊,等. 基于采煤机运动轨迹的刮板输送机布置形态检测研究[J]. 煤炭学报,2015,40(11):2514-2521. ZHANG Zhizhe,WANG Shibo,ZHANG Boyuan,et al. Shape detection of scraper conveyor based on shearer trajectory[J]. Journal of China Coal Society,2015,40(11):2514-2521.
[8] 牛永刚,窦学丽,殷鹏,等. 基于UWB与激光测距的综采工作面定位系统[J]. 工矿自动化,2021,47(7):125-129,134. NIU Yonggang,DOU Xueli,YIN Peng,et al. Positioning system of fully mechanized working face based on UWB and laser ranging[J]. Industry and Mine Automation,2021,47(7):125-129,134.
[9] 李森,王峰,刘帅,等. 综采工作面巡检机器人关键技术研究[J]. 煤炭科学技术,2020,48(7):218-225. LI Sen,WANG Feng,LIU Shuai,et al. Study on key technology of patrol robots for fully-mechanized mining face[J]. Coal Science and Technology,2020,48(7):218-225.
[10] 任怀伟,赵国瑞,周杰,等. 智能开采装备全位姿测量及虚拟仿真控制技术[J]. 煤炭学报,2020,45(3):956-971. REN Huaiwei,ZHAO Guorui,ZHOU Jie,et al. Key technologies of all position and orientation monitoring and virtual simulation and control for smart mining equipment[J]. Journal of China Coal Society,2020,45(3):956-971.
[11] 谢嘉成,王学文,李祥,等. 虚拟现实技术在煤矿领域的研究现状及展望[J]. 煤炭科学技术,2019,47(3):53-59. XIE Jiacheng,WANG Xuewen,LI Xiang,et al. Research status and prospect of virtual reality technology in field of coal mine[J]. Coal Science and Technology,2019,47(3):53-59.
[12] 葛世荣,王世博,管增伦,等. 数字孪生——应对智能化综采工作面技术挑战[J]. 工矿自动化,2022,48(7):1-12. DOI: 10.13272/j.issn.1671-251x.17959 GE Shirong,WANG Shibo,GUAN Zenglun,et al. Digital twin:meeting the technical challenges of intelligent fully mechanized working face[J]. Journal of Mine Automation,2022,48(7):1-12. DOI: 10.13272/j.issn.1671-251x.17959
[13] 谢嘉成,王学文,杨兆建,等. 综采工作面煤层装备联合虚拟仿真技术构想与实践[J]. 煤炭科学技术,2019,47(5):162-168. XIE Jiacheng,WANG Xuewen,YANG Zhaojian,et al. Technical conception and practice of joint virtual simulation for coal seam and equipment in fully-mechanized coal mining face[J]. Coal Science and Technology,2019,47(5):162-168.
[14] 葛世荣,张帆,王世博,等. 数字孪生智采工作面技术架构研究[J]. 煤炭学报,2020,45(6):1925-1936. GE Shirong,ZHNAG Fan,WANG Shibo,et al. Digital twin for smart coal mining workface:Technological frame and construction[J]. Journal of China Coal Society,2020,45(6):1925-1936.
[15] 毛善君,崔建军,令狐建设,等. 透明化矿山管控平台的设计与关键技术[J]. 煤炭学报,2018,43(12):3539-3548. MAO Shanjun,CUI Jianjun,LINGHU Jianshe,et al. System design and key technology of transparent mine management and control platform[J]. Journal of China Coal Society,2018,43(12):3539-3548.
[16] 张旭辉,张超,王妙云,等. 数字孪生驱动的悬臂式掘进机虚拟操控技术[J]. 计算机集成制造系统,2021,27(6):1617-1628. DOI: 10.13196/j.cims.2021.06.008 ZHANG Xuhui,ZHANG Chao,WANG Miaoyun,et al. Digital twin-driven virtual control technology of cantilever roadheader[J]. Computer Integrated Manufacturing Systems,2021,27(6):1617-1628. DOI: 10.13196/j.cims.2021.06.008
[17] GE Xing,XIE Jiacheng,WANG Xuewen,et al. A virtual adjustment method and experimental study of the support attitude of hydraulic support groups in propulsion state[J]. Measurement,2020:158. DOI: 10.1016/j.measurement.2020.107743.
[18] 李娟莉,沈宏达,谢嘉成,等. 基于数字孪生的综采工作面工业虚拟服务系统[J]. 计算机集成制造系统,2021,27(2):445-455. LI Juanli,SHEN Hongda,XIE Jiacheng,et al. Development of industrial virtual service system for fully mechanized mining face based on digital twin[J]. Computer Integrated Manufacturing Systems,2021,27(2):445-455.
[19] 王学文,谢嘉成,郝尚清,等. 智能化综采工作面实时虚拟监测方法与关键技术[J]. 煤炭学报,2020,45(6):1984-1996. DOI: 10.13225/j.cnki.jccs.zn20.0342 WANG Xuewen,XIE Jiacheng,HAO Shangqing,et al. Key technologies of real-time virtual monitoring method for an intelligent fully mechanized coal-mining face[J]. Journal of China Coal Society,2020,45(6):1984-1996. DOI: 10.13225/j.cnki.jccs.zn20.0342
[20] 谢嘉成,杨兆建,王学文,等. 综采工作面三机虚拟协同关键技术研究[J]. 工程设计学报,2018,25(1):85-93. XIE Jiacheng,YANG Zhaojian,WANG Xuewen,et al. Research on key technologies of virtual collaboration of three machines in fully mechanized coal mining face[J]. Chinese Journal of Engineering Design,2018,25(1):85-93.
[21] XIE Jiacheng,GE Fuxiang,CUI Tao,et al. A virtual test and evaluation method for fully mechanized mining production system with different smart levels[J]. International Journal of Coal Science & Technology,2022:9. DOI: 10.1007/s40789-022-00510-3.
[22] JIAO Xiubo,XIE Jiacheng,WANG Xuewen,et al. Intelligent decision method for the position and attitude self-adjustment of hydraulic support groups driven by a digital twin system[J]. Measurement,2022:202. DOI: 10.1016/j.measurement.2022.111722.
[23] 王学文,李素华,谢嘉成,等. 机器人运动学与时序预测融合驱动的刮板输送机调直方法[J]. 煤炭学报,2021,46(2):652-666. DOI: 10.13225/j.cnki.jccs.XR20.1897 WANG Xuewen,LI Suhua,XIE Jiacheng,et al. Straightening method of scraper conveyor driven by robot kinematics and time series prediction[J]. Journal of China Coal Society,2021,46(2):652-666. DOI: 10.13225/j.cnki.jccs.XR20.1897
[24] 王学文,葛星,谢嘉成,等. 基于真实煤层环境的液压支架运动虚拟仿真方法[J]. 煤炭科学技术,2020,48(2):158-163. DOI: 10.13199/j.cnki.cst.2020.02.020 WANG Xuewen,GE Xing,XIE Jiacheng,et al. Virtual simulation method of hydraulic support movement based on real coal seam environment[J]. Coal Science and Technology,2020,48(2):158-163. DOI: 10.13199/j.cnki.cst.2020.02.020
-
期刊类型引用(3)
1. 侯瑞丽. 基于EMMD-RVM的煤矿采矿机械设备异常检测系统. 能源与环保. 2022(05): 149-155 .  百度学术
百度学术
2. 李敬兆,叶桐舟,欧阳其春,王翼宁,陆正兴. 基于TCN的散装物料精准装车系统研究. 煤矿机械. 2021(03): 63-65 . 百度学术
3. 吴炬华. 基于雾计算的煤矿安全监测系统研究. 煤炭技术. 2021(12): 193-195 . 百度学术
其他类型引用(3)
 下载:
下载:

计量
- 文章访问数: 1991
- HTML全文浏览量: 73
- PDF下载量: 85
- 被引次数: 6
