Research on key technologies of intelligent gangue sorting robot
-
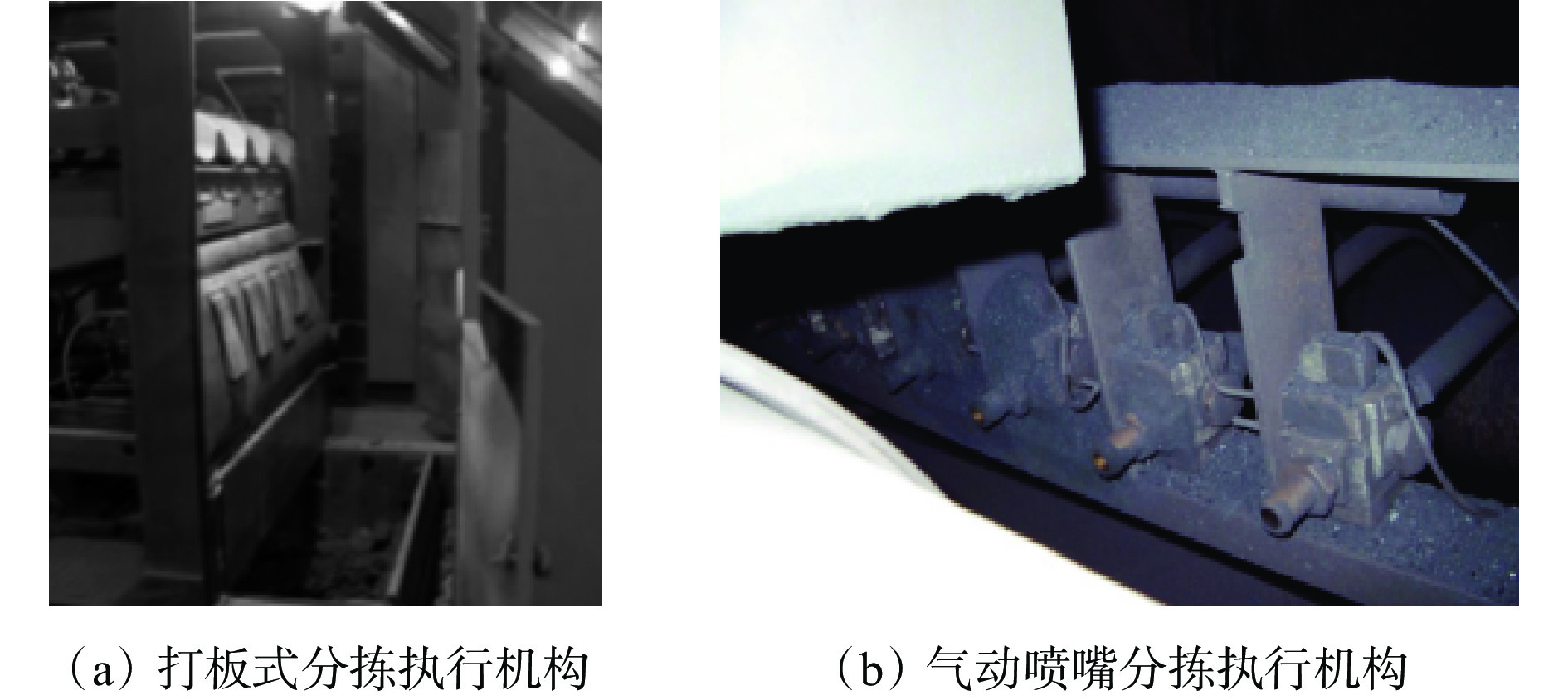
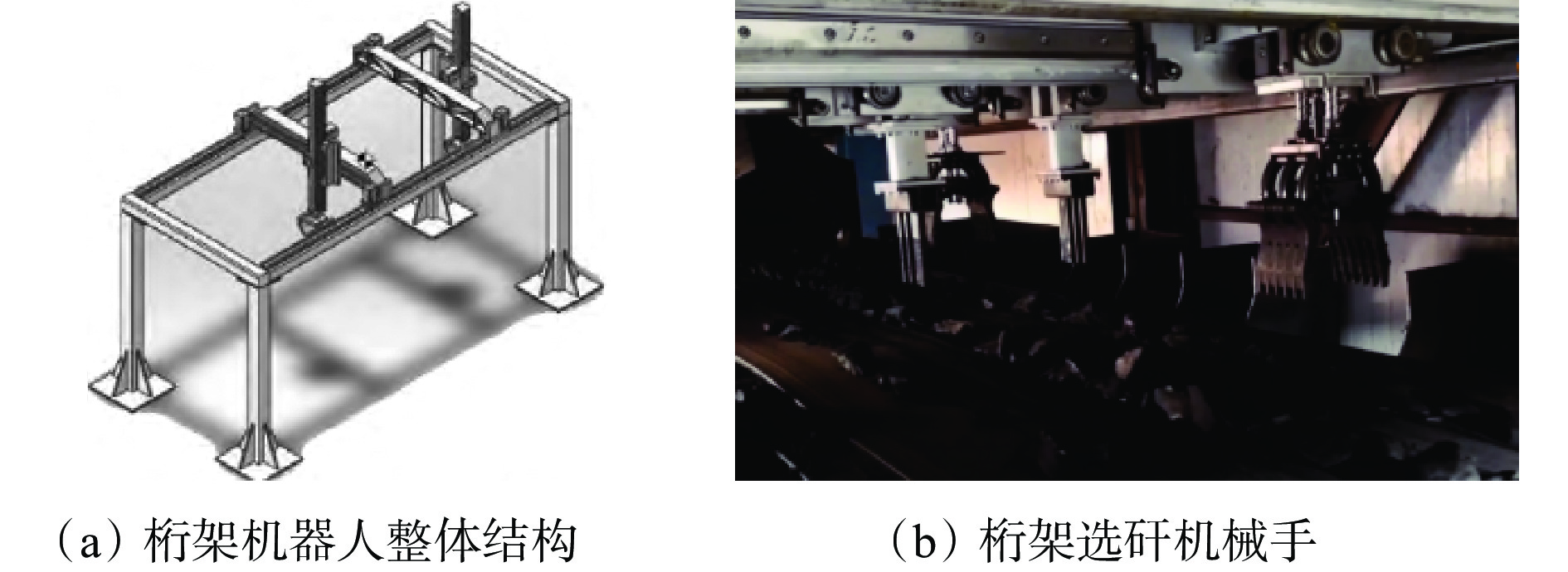
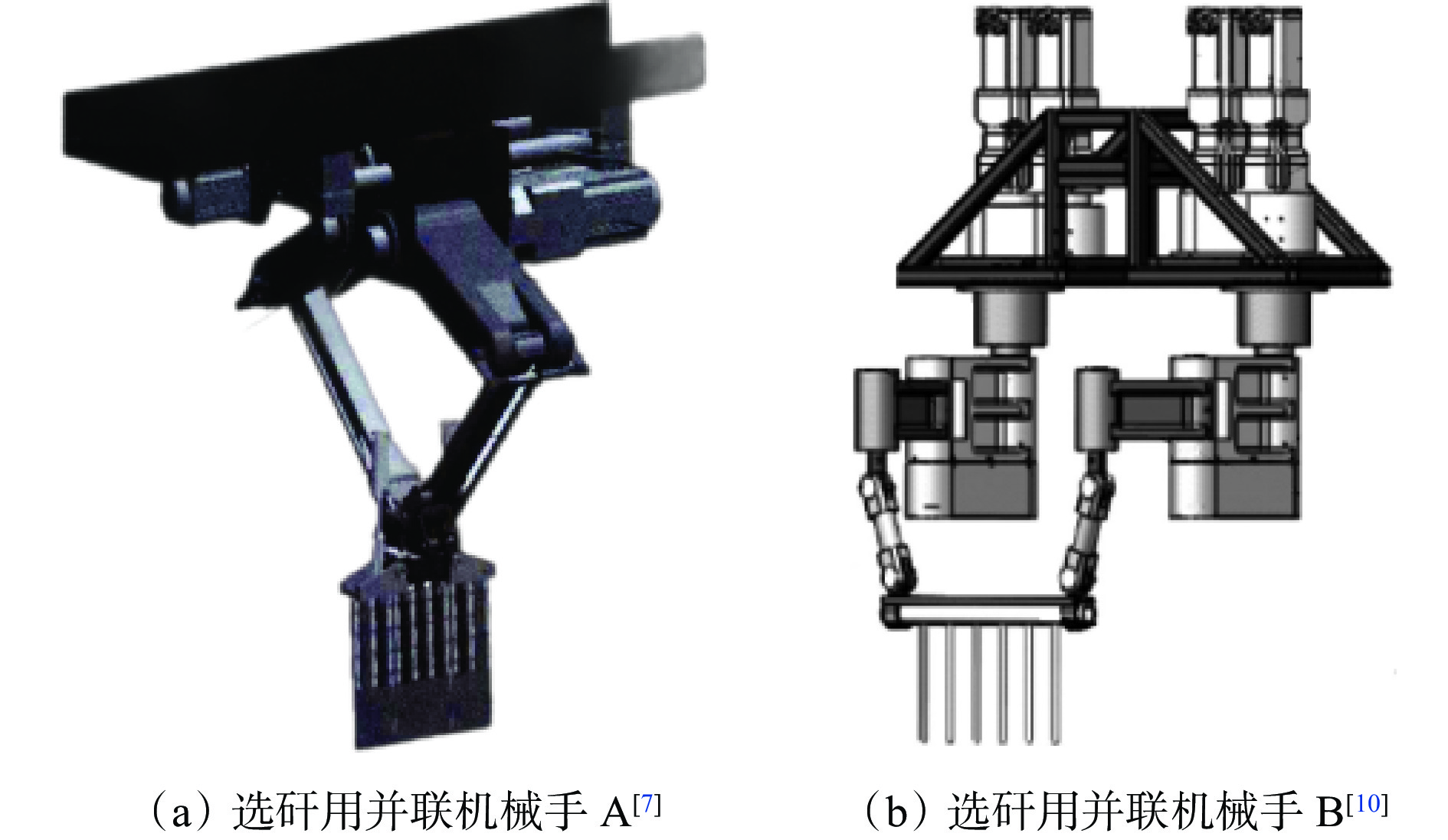
摘要: 介绍了智能选矸机器人应用与研究现状,指出目前智能选矸机器人主要基于X射线和图像识别原理,利用高压气动分拣和桁架机器人抓取进行煤矸分离;智能选矸机器人分拣执行机构主要有桁架式、并联式、串联式等类型,响应速度快,常常以“拨”和“抓”的形式分离矸石;在胶带运输过程中,智能选矸机器人“拨”需要考虑不同矸石尺寸的兼容性及运动路径的优化,“抓”需考虑机械手的作业空间及机器人的承载能力。分析了智能选矸机器人在现场复杂环境中有效实现矸石分拣的基于深度学习的煤矸识别、面向非结构多约束环境的选矸机械臂运动规划、基于力反馈的机械臂主动柔顺控制、多臂协作分拣任务分配策略及控制等关键技术,并指出基于深度学习的煤矸识别技术作为选矸机器人的关键技术之一,仍需在煤矸数据集高效构建方法、煤矸识别算法的泛化性提升及实时性优化等方面进行进一步研究。结合现场应用和机器人智能化发展需求,指出了智能选矸机器人今后的研究方向:针对现场复杂环境进行技术改进,提高煤矸识别算法的鲁棒性和自适应性;适应复杂环境的智能感知和控制技术及矸石高精度三维位姿估算技术的研究;基于力位混合控制的选矸机器人智能拣矸技术研发;智能选矸机器人井下选矸技术探究。Abstract: This paper introduces the application and research status of the intelligent gangue sorting robot. This paper points out that the intelligent gangue sorting robot is mainly based on the principle of X-ray and image identification. And the high-pressure pneumatic sorting and truss robot grasping sorting are used to separate coal and gangue. The sorting actuators are mainly truss type, parallel type and series type of intelligent gangue sorting robot. The sorting actuators have fast response speed and often separate the gangue in the form of 'pulling' and 'grasping'. In the process of belt transportation, the compatibility of different gangue sizes and the optimization of movement path need to be considered in the 'pulling' of the intelligent gangue sorting robot. And the working space of the manipulator and the bearing capacity of the robot need to be considered in the 'grasping'. This paper analyzes the key technologies such as deep learning-based coal and gangue identification, unstructured multi-constraint environment-oriented motion planning of gangue sorting manipulator, force feedback-based active compliance control of manipulator and multi-arm cooperative sorting task allocation strategy and control. These technologies are used for intelligent gangue sorting robot to effectively realize gangue sorting in complex on-site environment. This paper points out that coal and gangue identification technology based on deep learning is one of the key technologies of gangue sorting robot. It still needs further research on the efficient construction method of coal gangue data set, improving the generalization of coal gangue identification algorithm, and the real-time optimization of coal gangue identification algorithm. Combined with the demand of field application and intelligent robot development, the future research directions of intelligent gangue sorting robot are pointed out. In the complex environment on site, it is suggested to improve the robustness and adaptability of the coal gangue identification algorithm. It is suggested to develop intelligent sensing and control technology for complex environment and high-precision three-dimensional pose estimation technology for gangue. It is suggested to develop intelligent gangue picking technology of gangue picking robot based on force position hybrid control. It is suggested to research intelligent gangue sorting robot underground gangue sorting technology.
-
0. 引言
长期以来,煤炭一直是保障我国能源安全稳定供给的压舱石与稳定器。2023年我国原煤产量达47.1亿t,进口煤炭4.74亿t,分别同比增长3.4%与61.8%[1-2]。厚及特厚煤层的产量占比超过50%,因此,实现厚及特厚煤层智能、安全、高效开采是保障我国煤炭稳定供给的关键。
综采放顶煤开采方法是实现厚及特厚煤层安全高效开采的有效技术途径之一。我国自1982年首次引进综放开采技术装备以来,在综放工作面围岩稳定控制、提高顶煤冒放性、煤壁片帮防控、放煤工艺参数优化等方面取得了显著成效[3-5],实现了综放开采技术装备由引进到自主研发再到出口的阶段性跨越。单个综放工作面年生产能力超过1 500万t,但综放工作面仍然存在用人较多、工人劳动强度较大、自动化和智能化水平较低等问题,尤其是放煤工艺流程难以实现智能化,人工放煤不仅效率低、作业环境差,还极易发生欠放或过放等情况,导致煤炭资源回收率低且煤质难以保障[6-7]。综放工作面放煤工艺流程智能化已经成为现阶段制约厚及特厚煤层实现安全高效开采的技术瓶颈。
针对综放工作面智能化放煤技术难题,国内外学者进行了深入研究,部分学者采用视频、音频、射线、超声波等传感技术[8-12]对综放工作面后部刮板输送机上的煤矸进行识别,从而控制放煤口的关闭,在工程现场应用中取得了一定效果,但受制于井下综放工作面煤层厚度变化大、夹矸层多、高粉尘、低照度等复杂恶劣环境,智能化放煤仍难以实现常态化应用。本文从围岩控制、智能割煤、智能放煤等方面分析了智能化综放开采技术发展现状及存在的问题,提出了智能化综放开采技术装备的发展趋势。
1. 智能化综放开采技术难题与工程需求
我国综采放顶煤开采技术于1982年从国外引进,并针对国内煤层赋存条件进行了改进,1984年在沈阳焦煤股份有限公司蒲河煤矿特厚煤层进行实验[13],但工程实践效果不佳。在充分吸收蒲河煤矿综放开采经验教训的基础上,于1984年在甘肃兰州窑街矿务局急倾斜特厚煤层首次成功实施了水平分段放顶煤开采,取得了较好的应用效果。此后逐渐将特厚煤层综放开采技术在国内进行了大范围推广应用[14]。
经过四十余年的开采实践,综放工作面一次开采煤层厚度越来越大,如在鄂尔多斯市国源矿业开发有限责任公司龙王沟煤矿实现了近30 m特厚煤层大采高综放开采;综放工作面的机采高度越来越大,如在兖矿能源金鸡滩煤矿实现了综放工作面最大机采高度6.5 m,液压支架最大支撑高度达7.0 m,单个工作面的年生产能力超过1 500万t;综放液压支架的架型结构逐渐由四柱支撑掩护式向两柱掩护式发展,后部刮板输送机逐渐由端卸向交叉侧卸过渡,控制方式逐渐由手动控制向电液控制迈进。综放工作面智能化放煤的探索实践取得了一定应用效果,但仍然存在诸多不足,主要表现在以下方面。
1) 综放工作面普遍存在巷道掘进效率低、围岩控制效果差等问题,受顶煤厚度大、稳定性差等因素影响,需要布设较多锚杆、锚索,传统锚杆、锚索施工工艺复杂,施工效率低,且极易发生冒顶等安全事故,工程现场亟需开展巷道围岩安全高效控制技术装备研发,提高巷道围岩控制与支护效率。
2) 综放工作面回采过程中需要进行超前支护,传统单体液压支柱支护方式存在支护效率低、工人劳动强度大、有效支护力低、支护效果差等问题,传统“两片式”结构的超前液压支架则存在整体顶梁面积大的问题,难以避开锚杆、锚索等主动支护结构,在移架过程中易对顶板锚杆、锚索及围岩结构造成破坏,极易导致围岩发生损伤破坏失稳,工程现场亟需开发对顶板无反复支撑破坏的高效支护装置。
3) 西部矿区浅埋深、坚硬、特厚煤层的顶煤冒放性差,传统综放开采技术与装备适应性差,导致煤炭资源回采率低,顶煤冒放结构与煤壁片帮机理不清晰,导致综放开采效果不理想。工程现场亟需揭示浅埋深、坚硬、特厚煤层顶煤冒放机理,优化综放工作面开采工艺参数,提高顶煤冒放性及放出效率。
4) 综放工作面前部基本实现了采煤机记忆截割、刮板输送机智能变频调速运输,但液压支架的支护姿态监测困难,难以对液压支架的支护状态进行智能调控。工程现场亟需研发综放液压支架支护姿态监测系统,对液压支架的支护姿态进行实时监测,为实现液压支架自适应控制提供决策支撑。
5) 由于受工作面煤层厚度变化、高粉尘、低照度等因素影响,综放工作面实现常态化智能放煤难度较大,传统综放工作面放煤过程主要依靠工人经验,即工人采用听声音或固定时间间隔等方式进行放煤,放煤效率低,极易发生过放或欠放。工程现场亟需研发综放工作面智能放煤技术装备,实现顶煤垮落放出的智能控制。
针对综放工作面实现安全、高效、智能化开采存在的技术难题与工程需求,笔者及研发团队对综放工作面围岩控制技术、智能化放煤技术进行了研究,为综放工作面实现安全、高效、智能化开采提供技术与经验借鉴。
2. 综放工作面围岩控制技术
采场围岩稳定控制是实现综放工作面安全高效开采的基础,国内外学者针对综放工作面覆岩断裂结构及顶煤放出体结构进行了深入研究,提出了组合悬臂梁−铰接岩梁结构[15]、“台阶岩梁”结构[16]、“切落体”结构[17]等,并基于顶煤冒放结构研究了煤岩分界线移动规律、放煤步距、放煤方式等[18-21],对提高放顶煤开采效率、资源回采率、安全开采水平等具有重要意义,但对西部浅埋深、坚硬、特厚煤层顶煤冒放结构及提高资源回采率技术研究较少,相关技术亟待突破。
2.1 坚硬煤层顶煤冒放结构与冒放性
我国西部神府矿区赋存有大量埋深较浅、煤质坚硬、厚度较大的煤层,采用传统综放开采技术存在顶煤冒放性差、放出块度大、放煤效率低、回采率低等问题,如图1所示。
分析浅埋深、坚硬、特厚煤层赋存情况及顶煤冒放结构可知,由于煤层埋深较浅、顶煤硬度较大,传统综放开采技术在工作面前方形成的支承压力难以对顶煤造成破坏,液压支架上方顶煤仍然保持较好的完整状态,形成了悬臂梁结构,如图2所示。
分析坚硬特厚煤层顶煤冒放结构发现,顶煤厚度越大、悬臂越短、顶板压力越小,则顶煤形成的悬臂梁结构越难发生断裂。因此,应采取措施减小顶煤厚度、增加悬臂梁长度、提高工作面前方的矿山压力。增加综放工作面采煤机的截割高度,不仅可减小支架上方顶煤厚度,增大超大采高综放支架的掩护梁长度,还可增大支架后方的悬臂梁长度;另外,机采高度增加还会导致综放工作面矿山压力显现更加剧烈,有利于提高支架上方顶煤压力,从而提高顶煤的冒放性。因此,针对浅埋深、坚硬、特厚煤层提出了超大采高综放开采技术。
顶煤的垮落放出不仅受矿山压力的影响,还受液压支架对顶煤反复支撑破坏的影响。通过实验及数值模拟分析发现,液压支架对顶煤的主动支护作用力(初撑力)可对顶煤产生一定破坏,且破坏深度与块度受初撑力大小与支撑次数的影响[22],如图3所示。但液压支架对顶煤反复支撑造成顶煤破坏的深度一般不超过2 m,且支撑次数应大于4次。
![图 3 液压支架初撑力与支撑次数对顶煤破坏深度的影响]() 图 3 液压支架初撑力与支撑次数对顶煤破坏深度的影响Figure 3. Influence of initial support force and support frequency on the destruction depth of top coal
图 3 液压支架初撑力与支撑次数对顶煤破坏深度的影响Figure 3. Influence of initial support force and support frequency on the destruction depth of top coal基于上述理论研究成果,针对金鸡滩矿2−2上坚硬特厚煤层研发了ZFY21000/35.5/70D型超大采高综放液压支架及配套装备[23],采用超大采高综放开采技术,工作面采煤机最大割煤高度达6.5 m,有效提高了浅埋深、坚硬、特厚煤层的冒放性,工作面年生产能力超过1 500万t。
2.2 智能自适应支护超前液压支架
针对综放工作面超前支护区域采用单体液压支柱及“两片式”超前液压支架存在的问题,综放工作面逐渐发展应用单元式超前液压支架。由于巷道顶板与底板一般为非平行状态,即顶板相对底板一般存在一定夹角,导致单元式超前液压支架的顶梁难以接顶、单元式超前液压支架的有效支护力低、顶梁与立柱连接销轴易发生损坏等,如图4所示。
针对上述问题,笔者研发了单元式超前液压支架顶梁可旋转自复位装置,如图5所示。当液压支架顶梁接触顶板岩层后,自复位装置可根据顶板岩层的倾斜情况自动发生旋转,促使支架顶梁与顶板岩层充分接顶,从而提高单元式超前液压支架对顶板的有效支护作用力,同时避免支架顶梁与立柱的连接销轴发生折断。
![图 5 单元式超前支架可旋转自复位装置]() 图 5 单元式超前支架可旋转自复位装置Figure 5. Rotatable self-resetting device of modular advanced support
图 5 单元式超前支架可旋转自复位装置Figure 5. Rotatable self-resetting device of modular advanced support在支架顶梁与支撑立柱之间安装了顶梁固定卡环、弹性复位环,其中顶梁固定卡环可连接顶梁与立柱球头,防止二者发生脱离,弹性复位环保证支架顶梁在不受外力作用时保持与底座平行。当顶梁与顶板接触时,顶梁固定卡环压缩弹性复位环,使顶梁发生一定角度旋转,促使顶梁与顶板充分接触。当单元支架降架后,支架顶梁与顶板脱离,弹性复位环驱动顶梁固定卡环使单元支架的顶梁自动转正,防止由于单元支架顶梁歪斜导致倾倒事故。上述研究成果在国内部分矿区进行了推广应用,取得了较好的工程应用效果。
2.3 巷道快速掘进高效支护技术
由于综放工作面两侧巷道一般采用沿底掘进方式,巷道顶板强度较低、控制困难。为了提高巷道顶板的稳定性,需要在巷道顶板布置锚杆、锚索进行加强支护,部分锚索的长度达8~10 m,巷道掘进过程中施工工艺复杂,导致掘进效率低、支护难度大。
为了简化综放工作面巷道掘进支护工艺流程,笔者提出以巷道支护液压支架替代传统锚网支护工艺,即当掘进机掘进一段距离后,在掘进工作面安设巷道支护液压支架,如图6所示,用巷道支护液压支架替代传统的锚网支护工艺。
巷道支护液压支架可通过在掘进机上布设滑道进行运输,即掘进机新揭露巷道断面后,在掘进机上布设滑道,将巷道支护液压支架置于滑道上,通过滑道将巷道支护液压支架运输至新揭露的巷道断面处,对巷道顶板与巷帮煤壁进行支护,可有效解决传统锚杆、锚索支护方式存在的支护效率低、支护工艺复杂、护顶护帮效果差等问题。
综放工作面正常回采过程中,巷道支护液压支架可充当巷道超前液压支架,即不再需要重新布设超前液压支架,节省了超前液压支架布设时间与经费。工作面回采过后,可对巷道支护液压支架进行回收,以方便后续综放工作面重复使用。上述技术不仅节约了传统锚杆锚索支护时间与成本,而且对顶板与巷道的封闭式支护效果更好,同时减少了后续工作面超前支护工艺环节,通过重复利用可大幅降低巷道支护成本,具有显著的技术与经济优势。
3. 综放工作面智能化放煤技术
智能化放煤技术主要涉及对液压支架支护状态的全面感知及基于煤矸识别的智能放煤控制。
3.1 综放液压支架位姿监测技术
综放液压支架位姿监测技术是实现综放工作面围岩自适应控制及智能化放煤的基础,传统液压支架位姿监测技术主要通过液压支架的结构参数及不同位置倾角传感器的监测值进行位姿解算。由于倾角传感器受井下环境因素影响较大,且掩护梁或连杆倾角较大时极易发生数据漂移,导致监测结果误差较大。另外,为了对液压支架顶梁前端的支护高度进行监测,一般还需要在液压支架顶梁安装1个测高传感器。上述传统监测技术存在传感器数量多、成本高、维护量大、数据处理困难等显著不足[24-27]。
针对上述传统液压支架位姿监测技术存在的不足,提出了基于立柱与尾梁千斤顶行程的综放液压支架位姿及支护高度监测方法。通过对液压支架进行运动学分析,构建了液压支架主体结构骨架模型,将传统对液压支架主体结构的几何关系求解转变为对液压支架主要铰接点的坐标关系求解[28],得出了液压支架支护姿态、支护高度求解的数学表达式。
综放液压支架的立柱、尾梁千斤顶行程值与液压支架的支护姿态存在单一的映射关系,通过提取综放液压支架的骨架结构模型,开发了基于牛顿−拉夫逊方法、弦割法、布罗伊登法的综放液压支架支护姿态与支护高度求解算法,实现了对综放液压支架顶梁、掩护梁、四连杆、尾梁相对于底座倾角的高效精准解算,同时可解算出液压支架顶梁前端的支护高度,有效提高了解算效率与精度,为液压支架支护姿态、支护高度监测提供了新方法。
3.2 智能放煤控制方法
目前,制约综放工作面实现智能化的主要因素是如何准确判断液压支架放煤口的最佳开闭时间,现有技术主要依靠放煤过程中形成的经验(如通过监测放煤过程中产生的声音、放煤时间等差异)来进行控制[29-30],部分学者尝试采用基于机器视觉的煤矸识别装置、振动感知装置等对煤矸界面进行识别[31-32],但由于煤层厚度一般存在一定程度的变化,且顶煤放出过程一般会进行多次、多轮放煤,放煤口关闭时间难以准确把握,经常导致工作面欠放或多放,造成煤炭资源损失或煤炭含矸率较高,难以实现智能化放煤。
针对上述问题,笔者提出了基于工作面地质模型与煤量监测的智能放煤控制方法,主要步骤如下。
1) 在工作面运输巷、回风巷、切眼处向顶煤进行钻探打孔,将运输巷中线与切眼中线交叉点作为坐标原点,运输巷中线的长轴为x轴,切眼中线的长轴为y轴,与水平面垂直方向为z轴,建立工作面地质模型坐标系。
2) 根据顶煤钻孔获得的顶煤厚度信息,采用差值计算方法建立工作面顶煤厚度变化的三维地质模型,基于三维地质模型信息,采用离散元数值模拟方法建立顶煤垮落过程的数值计算模型,三维地质模型与数值计算模型的坐标系均采用工作面地质模型坐标系。
3) 在采煤机机身中部位置安装地质雷达装置,在液压支架的尾梁上安装煤量扫描装置与煤矸图像识别装置。
4) 在采煤机割煤移动过程中,利用地质雷达装置对顶煤与顶板岩层分界面进行探测,根据探测结果对三维地质模型与数值计算模型进行超前修正。
5) 采煤机完成割煤后,开启液压支架的放煤口进行放煤。利用修正后的数值计算模型对液压支架上方的顶煤垮落体形态与顶煤放出量进行模拟分析,然后利用煤量扫描装置扫描确定刮板输送机上的煤流量。
6) 当煤量扫描装置扫描到的顶煤放出量达到数值计算模型模拟确定的顶煤放出量的80%时,启动煤矸图像识别装置对刮板输送机上的煤流进行煤矸识别。若煤矸图像识别装置检测到煤流中混有大量矸石,则关闭放煤口。
7) 当煤量扫描装置扫描到的顶煤放出量达到数值计算模型模拟确定的顶煤放出量时,无论是否检测到煤流中混有大量矸石,均关闭放煤口。
上述智能放煤控制方法将透明地质、煤量监测、煤矸识别技术进行融合,利用地质雷达对工作面上方较完整的顶煤与顶板岩层界面进行识别,基于识别结果对三维地质模型与数值计算模型进行实时修正,利用离散元数值计算模型模拟顶煤放出量,采用煤量扫描装置确定顶煤实际放出煤量,辅助采用煤矸图像识别装置对放出体进行智能识别,从而确定最佳放煤口关闭时间,有效解决了现有技术与装备难以确定综放工作面放煤口最佳关闭时间的问题,为实现综采放顶煤工作面智能化、无人化开采提供了一种有效的技术途径。
4. 结语与展望
综放工作面围岩控制与智能化放煤是实现厚及特厚煤层安全高效开采的关键,随着我国煤炭开发战略重心西移,西部矿区厚及特厚煤层的产量及开发强度将进一步增强,智能化综放开采技术的需求将进一步增大。基于我国智能化综放开采技术现状、存在的问题及工程技术需求,提出了未来我国智能化综放开采技术与装备的发展趋势:
1) 我国西部矿区赋存有大量特厚煤层,存在地质条件复杂、围岩控制难度大、地质灾害突出等问题,亟需对大采高综放工作面采动应力演化规律、覆岩断裂结构、顶煤冒放结构、煤壁片帮防控机理、近距离多煤层综放开采技术、煤柱留设尺寸、综合防灾治灾技术等进行系统研究,保障综放工作面实现安全高效开采。
2) 智能地质保障技术。智能地质保障技术是实现综放工作面安全高效开采的基础,虽然近年来提出了“透明地质”技术,但受地质探测技术装备探测精度限制,目前还很难实现地质透明。因此,亟需开发智能地质保障技术,为综放工作面灾害超前预测预警、超前治理及智能化开采奠定基础。
3) 机器视觉精准测量与智能感知技术。综放工作面前部需要实现采煤机智能截割,因此需要对工作面液压支架的位姿、护帮板伸缩状态、煤壁等进行精准测量感知,开发工作面视频拼接技术,以及基于机器视觉的空间位姿智能感知技术,为综放工作面实现常态化智能开采提供技术支撑。
4) 综放工作面设备智能精准自适应控制技术。研发适用于井下复杂恶劣作业环境的精准控制装备,实现采煤机自适应截割、液压支架智能自适应支护、刮板输送机智能调速运输、顶煤智能高效放煤。
5) 综放工作面数字孪生技术。基于高精度地质模型、综放工作面装备模型及围岩损伤破坏机理模型,构建综放工作面数字孪生模型,充分结合5G+VR/AR等技术,研发综放工作面智能人机交互模式及远程控制方法,实现综放工作面智能化开采技术常态化无人/少人运行。
-
表 1 主流选矸机器人系统工作原理
Table 1 Working principles of main gangue sorting robot systems
选矸机器人 煤矸识别 煤矸分离 特点 TDS智能干选机 X射线识别 高压气动分拣 可适配高速胶带,可分拣50~300 mm的矸石 GPRT智能煤矸分选机器人 图像识别 桁架机器人拨/抓分拣 可同时进行多臂分拣任务,可分拣50~800 mm的矸石 RDS智能选矸机器人 图像识别 高压气动分拣 可适配高速胶带,可分拣50~300 mm的矸石 BIS−R智能机器人拣矸系统 X射线识别 桁架机器人抓取 适配0.5 ~0.8 m/s带速,可分拣50~300 mm的矸石  下载: 导出CSV
下载: 导出CSV
-
[1] 葛世荣,胡而已,裴文良. 煤矿机器人体系及关键技术[J]. 煤炭学报,2020,45(1):455-463. GE Shirong,HU Eryi,PEI Wenliang. Classification system and key technology of coal mine robot[J]. Journal of China Coal Society,2020,45(1):455-463.
[2] 王国法,范京道,徐亚军,等. 煤炭智能化开采关键技术创新进展与展望[J]. 工矿自动化,2018,44(2):5-12. WANG Guofa,FAN Jingdao,XU Yajun,et al. Innovation process and prospect on key technologies of intelligent coal mining[J]. Industry and Mine Automation,2018,44(2):5-12.
[3] 刘园园. “十四五”能源领域科技创新规划[N]. 科技日报, 2022-04-06(1). LIU Yuanyuan. The 14th Five-Year Plan for energy science and technological innovation[N]. Science and Technology Daily, 2022-04-06(1).
[4] 葛世荣. 煤矿机器人现状及发展方向[J]. 中国煤炭,2019,45(7):18-27. DOI: 10.3969/j.issn.1006-530X.2019.07.004 GE Shirong. Present situation and development direction of coal mine robots[J]. China Coal,2019,45(7):18-27. DOI: 10.3969/j.issn.1006-530X.2019.07.004
[5] 胡而已,葛世荣. 煤矿机器人研发进展与趋势分析[J]. 智能矿山,2021,2(1):59-74. HU Eryi,GE Shirong. Coal mining robot research progress and trend analysis[J]. Journal of Intelligent Mine,2021,2(1):59-74.
[6] 黄邦松. TDS智能干选机在双柳煤矿的应用[J]. 中国煤炭,2020,46(3):47-50. DOI: 10.3969/j.issn.1006-530X.2020.03.008 HUANG Bangsong. Application of the TDS intelligent dry separator at Shuangliu Coal Mine[J]. China Coal,2020,46(3):47-50. DOI: 10.3969/j.issn.1006-530X.2020.03.008
[7] 江洪,宋勇,隋国成,等. 智能选矸机器人系统的研究与应用[J]. 选煤技术,2020(4):81-87. JIANG Hong,SONG Yong,SUI Guocheng,et al. Study and application of the intelligent robotic gangue picking system[J]. Coal Preparation Technology,2020(4):81-87.
[8] 朱道瑶,梁殿印,史佩伟,等. 矿石拣选技术和设备的研究和进展[J]. 矿山机械,2016,44(7):5-10. ZHU Daoyao,LIANG Dianyin,SHI Peiwei,et al. Research and development of ore sorting technology and equipments[J]. Mining & Processing Equipment,2016,44(7):5-10.
[9] 王鹏,曹现刚,夏晶,等. 基于机器视觉的多机械臂煤矸石分拣机器人系统研究[J]. 工矿自动化,2019,45(9):47-53. WANG Peng,CAO Xiangang,XIA Jing,et al. Research on multi-manipulator coal and gangue sorting robot system based on machine vision[J]. Industry and Mine Automation,2019,45(9):47-53.
[10] 赵明辉,宣鹏程,张少宾. 并联煤矸石分拣机器人的结构设计及分析[J]. 机床与液压,2021,49(5):55-59. ZHAO Minghui,XUAN Pengcheng,ZHANG Shaobin. Structure design and analysis for parallel gangue sorting robot[J]. Machine Tool & Hydraulics,2021,49(5):55-59.
[11] 商德勇,章林,牛艳奇,等. 煤矸分拣机器人设计与关键技术分析[J]. 煤炭科学技术,2022,50(3):232-238. SHANG Deyong,ZHANG Lin,NIU Yanqi,et al. Design and key technology analysis of coal-gangue sorting robot[J]. Coal Science and Technology,2022,50(3):232-238.
[12] 袁华昕. 基于X射线图像的煤矸石智能分选控制系统研究[D]. 沈阳: 东北大学, 2014. YUAN Huaxin. Research on coal and gangue smart sorting control system based on X-ray image[D]. Shenyang: Northeastern University, 2014.
[13] 李曼,段雍,曹现刚,等. 煤矸分选机器人图像识别方法和系统[J]. 煤炭学报,2020,45(10):3636-3644. LI Man,DUAN Yong,CAO Xiangang,et al. Image identification method and system for coal and gangue sorting robot[J]. Journal of China Coal Society,2020,45(10):3636-3644.
[14] 曹现刚,费佳浩,王鹏,等. 基于多机械臂协同的煤矸分拣方法研究[J]. 煤炭科学技术,2019,47(4):7-12. CAO Xiangang,FEI Jiahao,WANG Peng,et al. Study on coal-gangue sorting method based on multi- manipulator collaboration[J]. Coal Science and Technology,2019,47(4):7-12.
[15] 李阳阳. 长平公司洗煤厂智能煤矸分选机器人技术研究[J]. 机械管理开发,2022,37(1):221-222. LI Yangyang. Intelligent gangue sorting robot technology research in Changping Coal Washing Plant[J]. Mechanical Management and Development,2022,37(1):221-222.
[16] 宋文革,陶亚东,齐成军,等. 智能机器人拣矸系统的设计研究[J]. 煤炭加工与综合利用,2018(9):5-8. SONG Wenge,TAO Yadong,QI Chengjun,et al. Design and research of intelligent robot gangue picking system[J]. Coal Processing & Comprehensive Utilization,2018(9):5-8.
[17] 马宪民,蒋勇. 煤与矸石识别的数字图像处理方法探讨[J]. 煤矿机电,2004,25(5):9-11. DOI: 10.3969/j.issn.1001-0874.2004.05.004 MA Xianmin,JIANG Yong. Digital image processing method of coal gangues[J]. Colliery Mechanical & Electrical Technology,2004,25(5):9-11. DOI: 10.3969/j.issn.1001-0874.2004.05.004
[18] 何敏,王培培,蒋慧慧. 基于SVM和纹理的煤和煤矸石自动识别[J]. 计算机工程与设计,2012,33(3):1117-1121. DOI: 10.3969/j.issn.1000-7024.2012.03.055 HE Min,WANG Peipei,JIANG Huihui. Recognition of coal and stone based on SVM and texture[J]. Computer Engineering and Design,2012,33(3):1117-1121. DOI: 10.3969/j.issn.1000-7024.2012.03.055
[19] 孙继平,佘杰. 基于支持向量机的煤岩图像特征抽取与分类识别[J]. 煤炭学报,2013,38(增刊2):508-512. SUN Jiping,SHE Jie. Coal-rock image-feature extraction and recognition based on support vector machine[J]. Journal of China Coal Society,2013,38(S2):508-512.
[20] LI Lihong,WANG Haijiang,AN Lei. Research on recognition of coal and gangue based on image processing[J]. World Journal of Engineering,2015,12(3):247-253. DOI: 10.1260/1708-5284.12.3.247
[21] 李莹. 基于深度学习的煤矸石目标检测方法研究[D]. 西安: 西安科技大学, 2020. LI Ying. Research on coal gangue detection based on deep learning[D]. Xi'an: Xi'an University of Science and Technology, 2020.
[22] 曹现刚,李莹,王鹏,等. 煤矸石识别方法研究现状与展望[J]. 工矿自动化,2020,46(1):38-43. CAO Xiangang,LI Ying,WANG Peng,et al. Research status of coal-gangue identification method and its prospect[J]. Industry and Mine Automation,2020,46(1):38-43.
[23] 曹现刚,刘思颖,王鹏,等. 面向煤矸分拣机器人的煤矸识别定位系统研究[J]. 煤炭科学技术,2022,50(1):237-246. CAO Xiangang,LIU Siying,WANG Peng,et al. Research on coal gangue identification and positioning system based on coal-gangue sorting robot[J]. Coal Science and Technology,2022,50(1):237-246.
[24] 郜亚松,张步勤,郎利影. 基于深度学习的煤矸石识别技术与实现[J]. 煤炭科学技术,2021,49(12):202-208. GAO Yasong,ZHANG Buqin,LANG Liying. Coal and gangue recognition technology and implementation based on deep learning[J]. Coal Science and Technology,2021,49(12):202-208.
[25] 沈科,季亮,张袁浩,等. 基于改进YOLOv5s模型的煤矸目标检测[J]. 工矿自动化,2021,47(11):107-111,118. SHEN Ke,JI Liang,ZHANG Yuanhao,et al. Research on coal and gangue detection algorithm based on improved YOLOv5s model[J]. Industry and Mine Automation,2021,47(11):107-111,118.
[26] 谭建荣. 智能制造与机器人应用关键技术与发展趋势[J]. 机器人技术与应用,2017(3):18-19. DOI: 10.3969/j.issn.1004-6437.2017.03.007 TAN Jianrong. Key technologies and development trends of intelligent manufacturing and robot applications[J]. Robot Technique and Application,2017(3):18-19. DOI: 10.3969/j.issn.1004-6437.2017.03.007
[27] 李黎,尚俊云,冯艳丽,等. 关节型工业机器人轨迹规划研究综述[J]. 计算机工程与应用,2018,54(5):36-50. DOI: 10.3778/j.issn.1002-8331.1712-0116 LI Li,SHANG Junyun,FENG Yanli,et al. Research of trajectory planning for articulated industrial robot:a review[J]. Computer Engineering and Applications,2018,54(5):36-50. DOI: 10.3778/j.issn.1002-8331.1712-0116
[28] 夏群峰,彭勇刚. 基于视觉的机器人抓取系统应用研究综述[J]. 机电工程,2014,31(6):697-701,710. XIA Qunfeng,PENG Yonggang. Review on application research of robots scraping system based on visual[J]. Journal of Mechanical & Electrical Engineering,2014,31(6):697-701,710.
[29] 贾丙西,刘山,张凯祥,等. 机器人视觉伺服研究进展:视觉系统与控制策略[J]. 自动化学报,2015,41(5):861-873. JIA Bingxi,LIU Shan,ZHANG Kaixiang,et al. Survey on robot visual servo control:vision system and control strategies[J]. Acta Automatica Sinica,2015,41(5):861-873.
[30] 赵明辉. 双臂并联煤矸石分拣机器人及其轨迹规划研究[J]. 工矿自动化,2020,46(9):57-63. ZHAO Minghui. Research on dual-arm parallel coal gangue sorting robot and its trajectory planning[J]. Industry and Mine Automation,2020,46(9):57-63.
[31] 夏晶,张昊,周世宁,等. 煤矸分拣机器人动态拣取避障路径规划[J]. 煤炭学报,2021,46(增刊1):570-577. XIA Jing,ZHANG Hao,ZHOU Shining,et al. Dynamic picking and obstacle avoidance path planning of coal gangue sorting robot[J]. Journal of China Coal Society,2021,46(S1):570-577.
[32] 朱子祺,李创业,代伟. 基于G−RRT*算法的煤矸石分拣机器人路径规划[J]. 工矿自动化,2022,48(3):55-62. ZHU Ziqi,LI Chuangye,DAI Wei. Path planning of coal gangue sorting robot based on G-RRT* algorithm[J]. Journal of Mine Automation,2022,48(3):55-62.
[33] 谢龙,刘山. 基于改进势场法的机械臂动态避障规划[J]. 控制理论与应用,2018,35(9):1239-1249. DOI: 10.7641/CTA.2018.70187 XIE Long,LIU Shan. Dynamic obstacle-avoiding motion planning for manipulator based on improved artificial potential filed[J]. Control Theory & Applications,2018,35(9):1239-1249. DOI: 10.7641/CTA.2018.70187
[34] 邹宇星,李立君,高自成. 基于改进PRM的采摘机器人机械臂避障路径规划[J]. 传感器与微系统,2019,38(1):52-56. ZOU Yuxing,LI Lijun,GAO Zicheng. Obstacle avoidance path planning for harvesting robot arm based on improved PRM[J]. Transducer and Microsystem Technologies,2019,38(1):52-56.
[35] 陈秋莲,蒋环宇,郑以君. 机器人路径规划的快速扩展随机树算法综述[J]. 计算机工程与应用,2019,55(16):10-17. DOI: 10.3778/j.issn.1002-8331.1905-0061 CHEN Qiulian,JIANG Huanyu,ZHENG Yijun. Summary of rapidly-exploring random tree algorithm in robot path planning[J]. Computer Engineering and Applications,2019,55(16):10-17. DOI: 10.3778/j.issn.1002-8331.1905-0061
[36] 葛吉民,邓朝晖,李尉,等. 机器人磨抛力柔顺控制研究进展[J]. 中国机械工程,2021,32(18):2217-2230,2238. DOI: 10.3969/j.issn.1004-132X.2021.18.011 GE Jimin,DENG Zhaohui,LI Wei,et al. Research progresses of robot grinding and polishing force compliance controls[J]. China Mechanical Engineering,2021,32(18):2217-2230,2238. DOI: 10.3969/j.issn.1004-132X.2021.18.011
-
期刊类型引用(4)
1. 阚磊. 麻地梁煤矿大采高综放工作面主动式超前支护技术应用. 工矿自动化. 2025(06)  本站查看
本站查看
2. 王国法,张金虎,任怀伟,杜毅博,张德生,闫汝瑜,于翔. 煤炭高效开采数智技术与成套装备研究及应用. 煤炭学报. 2025(01): 43-64 . 百度学术
3. 姜二虎,王灿灿. 矿井瓦斯抽采钻孔智能绘图及分析系统应用研究. 煤炭技术. 2025(06): 172-176 . 百度学术
4. 张伟,高鹏,崔博,阿斯哈尔·尼亚孜别克,潘卫东. 近距离特厚煤层综放开采可行性及合理放煤工艺研究. 工矿自动化. 2024(11): 161-168 . 本站查看
其他类型引用(0)
-
其他相关附件