
Small object detection method for mining face based on improved YOLOv8n
-
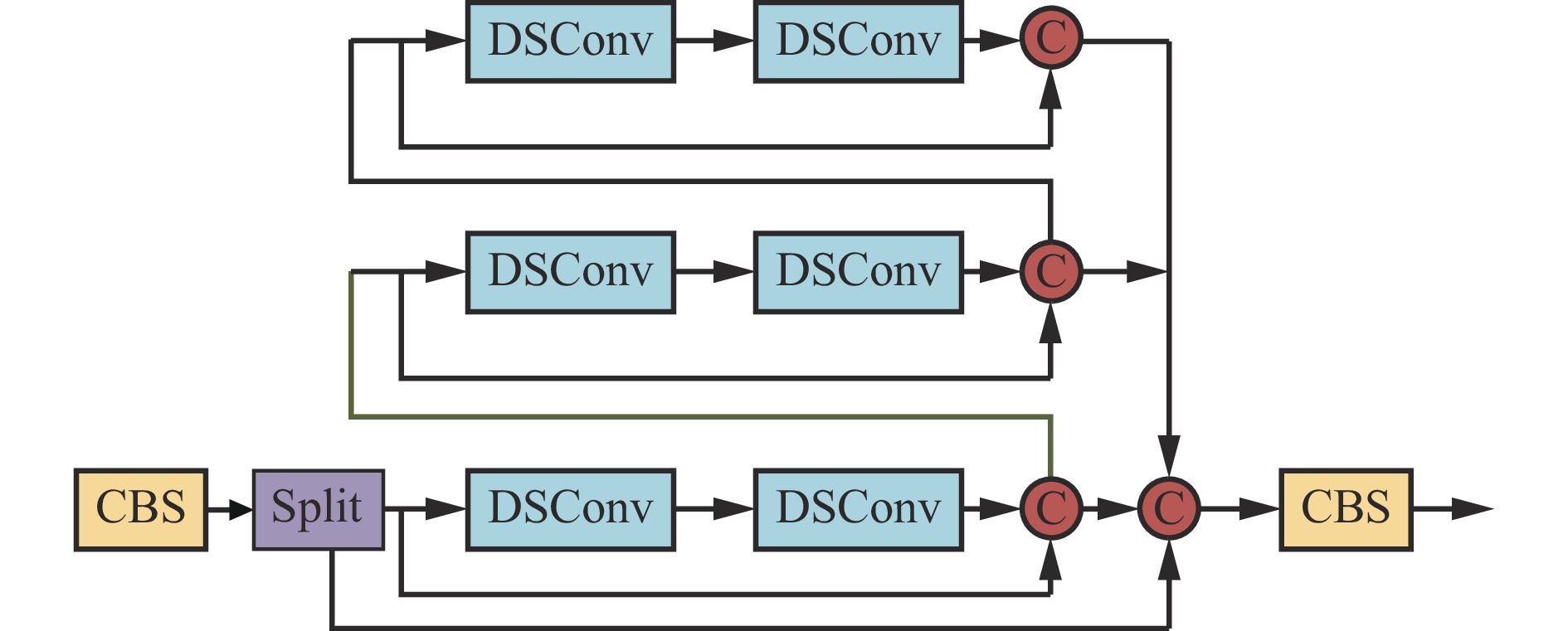
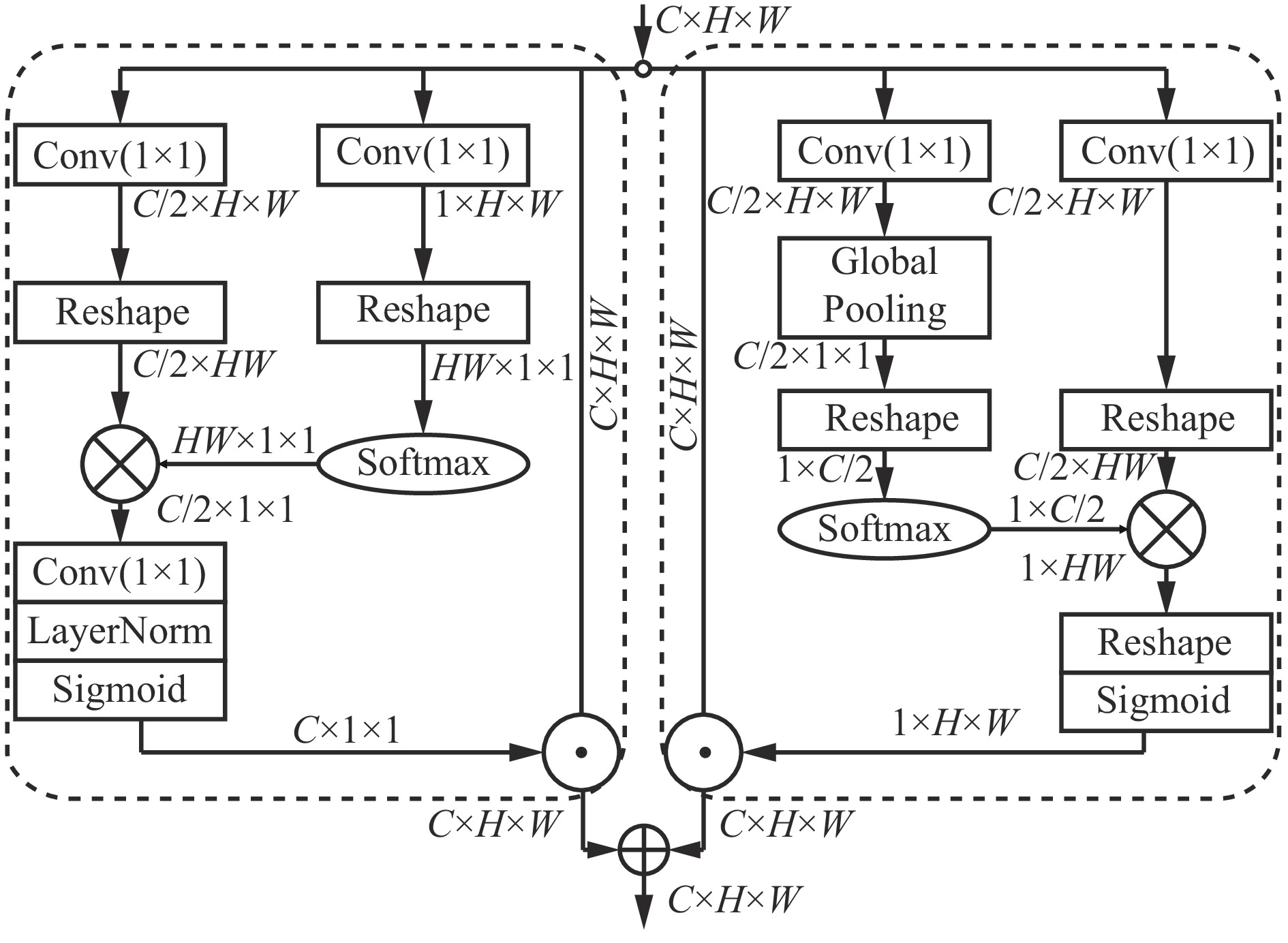
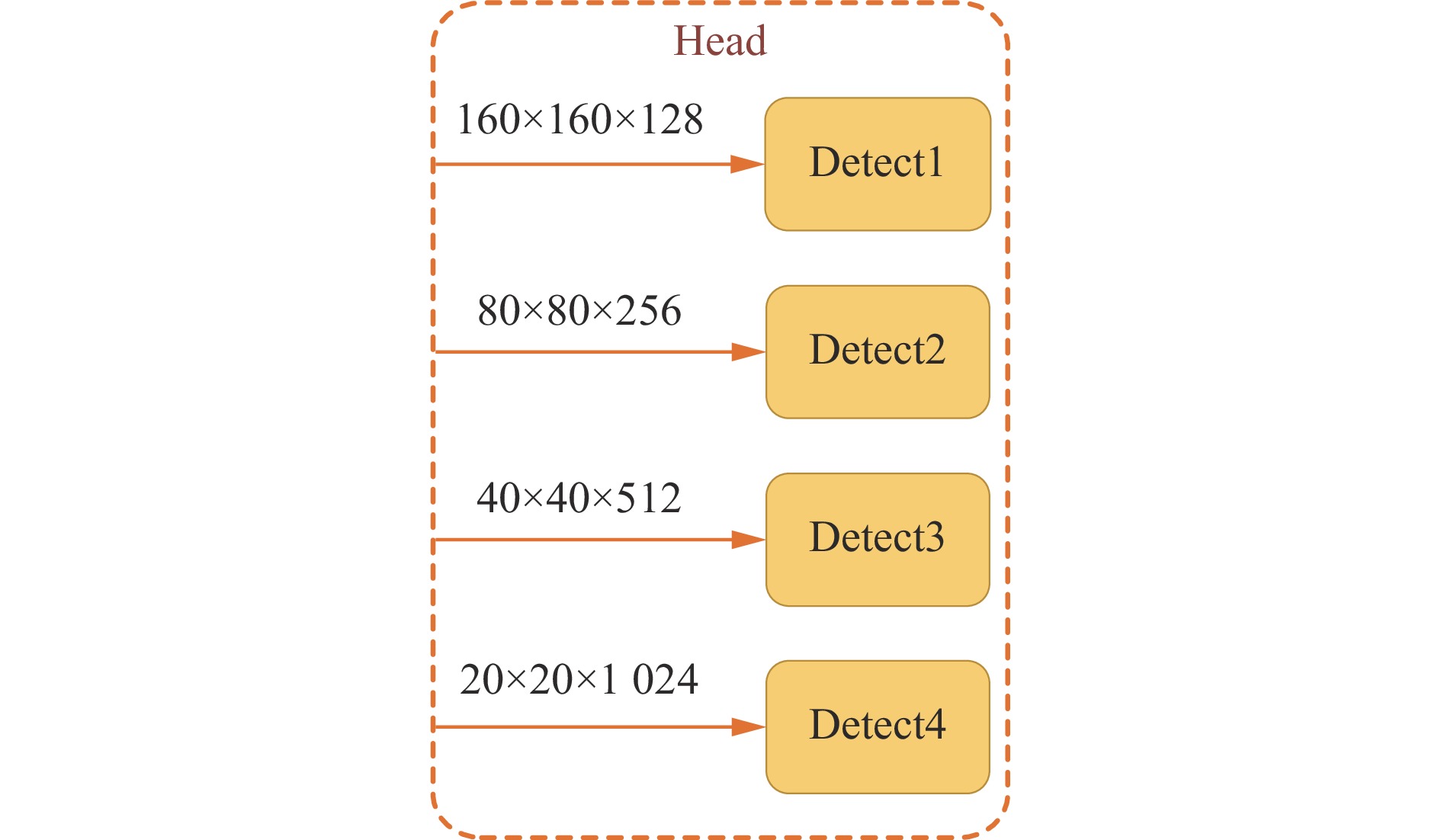
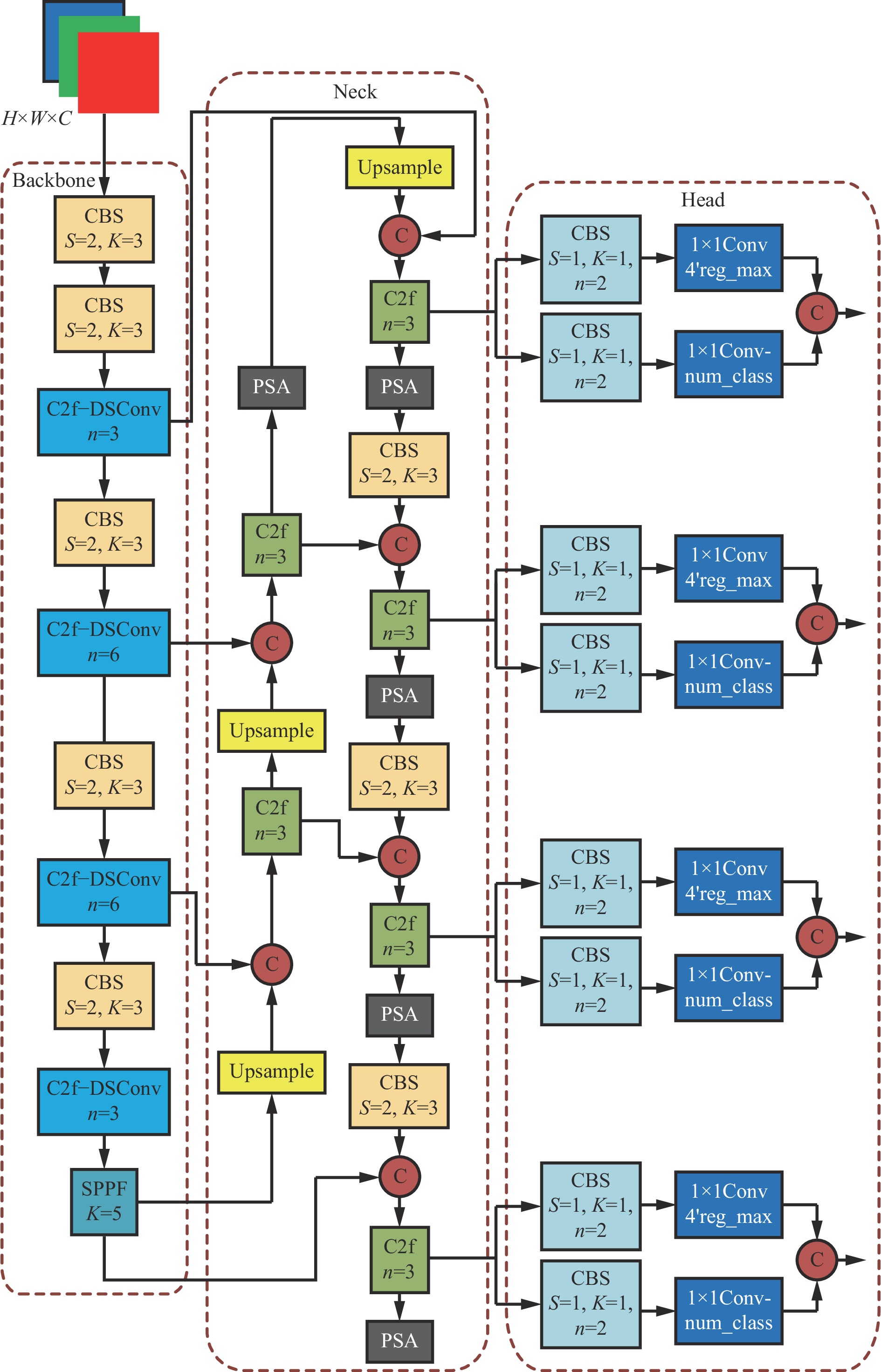
摘要: 为有效检测和识别煤矿井下采掘工作面人员是否佩戴安全防护装置,针对井下光照条件差、安全防护装备目标尺寸小且颜色与背景相似等情况,提出了一种基于改进YOLOv8n的采掘工作面小目标检测方法。在YOLOv8n骨干网络C2f模块中融合动态蛇形卷积(DSConv),构建C2f−DSConv模块,以提高模型提取多尺度特征的能力;在Neck层引入极化自注意力(PSA)机制,以减少信息损失,提高特征表达能力;在Head层增设1个专门针对小目标的检测头,形成4检测头结构,以扩大模型检测范围。实验结果表明,改进YOLOv8n模型对井下人员及其所佩戴安全帽、矿灯、口罩、自救器检测的平均精度分别为98.3%,95.8%,89.9%,87.2%,90.8%,平均精度均值为92.4%,优于Faster R−CNN,YOLOv5s,YOLOv7,YOLOv8n模型,且检测速度达208帧/s,满足煤矿井下目标检测精度和实时性要求。Abstract: In order to effectively detect and recognize whether the personnel on the mining face in coal mines are wearing safety protection devices, a small object detection method based on improved YOLOv8n is proposed. It is applied in situations such as poor underground lighting conditions, small object sizes of safety protection device, and similar colors to the background. The method integrates Dynamic Snake Convolution (DSConv) into the C2f module of YOLOv8n backbone network to construct a C2f DSConv module, in order to enhance the model's capability to extract multi-scale features. The method introduces polarized self-attention (PSA) mechanism in the Neck layer to reduce information loss and improve feature expression capability. The method adds one detection head specifically designed for small objects at the Head layer, forming a four detection head structure to expand the detection range of the model. The experimental results show that the improved YOLOv8n model has an average precision of 98.3%, 95.8%, 89.9%, 87.2%, and 90.8% for detecting underground personnel and their safety helmets, mining lights, masks, and self rescue devices, respectively. The average precision is 92.4%, which is better than Faster R-CNN, YOLOv5s, YOLOv7, and YOLOv8n models. The detection speed reaches 208 frames per second, meeting the requirements of object detection precision and real-time performance in coal mines.
-
0. 引言
煤矿单轨吊作为辅助运输系统的关键装备之一,具有运输连续性好、运输能力强、不受煤矿巷道底板条件限制等优点,广泛应用于煤矿井下采掘工作面。传统的煤矿单轨吊主要依赖人工驾驶,存在自动化和智能化程度低等问题,已成为制约煤矿辅助运输效率和智能化发展的关键问题[1-2]。
2019年,国家煤矿安监局公布了《煤矿机器人重点研发目录》,从国家层面指明了煤矿运输机器人的发展方向,并针对井下无人驾驶运输装备研发提出了精确定位、安全探测、自主感知、主动避障、自动错车、风门联动等功能要求,实现井下运输无人化驾驶。近年来,部分煤矿已经开始尝试进行智能单轨吊研究[3]。由于煤矿井下环境复杂,单轨吊智能辅助运输系统在驱动技术、定位技术、控制技术、信息传输技术等方面仍存在诸多难题。因此,如何实现单轨吊智能化运输已成为煤矿安全、高效、智能辅助运输亟待解决的关键技术问题。
1. 煤矿单轨吊辅助技术研究现状
1.1 煤矿单轨吊辅助运输设备研究现状
目前,矿用单轨吊主要包括防爆柴油机单轨吊、防爆蓄电池单轨吊、气动单轨吊、绳牵引单轨吊和电缆拖挂单轨吊5种。防爆柴油机单轨吊以防爆柴油机为动力源,具有牵引力大、爬坡能力强等优点,主要应用于长距离、大坡度和重载工况的物料运输作业,但运行时噪声大,对环境有污染。石家庄煤矿机械有限责任公司自主研发的DC280/160Y型防爆柴油机单轨吊[4]满足国Ⅲ排放标准,发动机驱动功率为160 kW,牵引力达280 kN。防爆蓄电池单轨吊以蓄电池组为动力源,相比防爆柴油机单轨吊具有噪声小、无污染等优点。山东新沙单轨运输装备有限公司研发的DXR120型防爆蓄电池单轨吊[5],续航能力强,最高可达22 km。气动单轨吊以压缩空气为动力源,具有体积小、运输安全、无污染等优点,缺点是牵引力小、运输速度慢,适用于煤矿井下轻型短距离物料运输。太原矿机电气股份有限公司研制的DQD20型气动单轨吊[6]结构紧凑,尺寸仅为860 mm×790 mm(宽×高)。绳牵引单轨吊以绞车为动力源,运输距离受限、结构复杂。常州科研试制中心有限公司研发的自驾式绳牵引单轨吊[7]具有特定的电控系统,跟车司机独立操控整套设备,减少了参与人员。电缆拖挂单轨吊以防爆交流电动机为动力源,易于调度、运输距离短、牵引力小,适用于轻型短距离运输。防爆柴油机单轨吊和防爆蓄电池单轨吊以其运输能力强的优势,现已广泛应用于煤矿井下设备及物料的运输,其主要代表装备如图1所示。
随着煤矿智能化建设的推进和国家对煤矿井下单轨吊排放标准的提高,防爆蓄电池单轨吊以其绿色清洁等特点逐渐成为煤矿井下辅助运输的重点研发装备。
1.2 煤矿单轨吊辅助运输系统电池驱动技术研究现状
煤矿单轨吊动力电池主要包括铅酸电池和磷酸铁锂电池2种。铅酸电池具有电压稳定、价格便宜、可靠性高、高低温性能良好等优点,且不需要复杂的电池管理控制电路,但其能量密度低、日常维护频繁、存在重金属污染[8-9]。磷酸铁锂电池具有能量密度大、循环寿命长、充放电效率高、自放电率低、无记忆效应及无污染等优点,但其防爆系统和管理系统复杂。因此,许多学者从煤矿锂电池的隔爆和管理2个方面开展了研究。
在煤矿锂电池隔爆方面,主要研究了电池隔爆腔结构设计。现有隔爆腔常采用经验法进行设计,造成隔爆腔壁面应力储备过多、结构笨重、质量较大,间接影响了单轨吊的续航能力,因此需要对隔爆腔进行轻量化设计,在满足强度要求下,通过使用高强度材料、增加肋板的方式减小壁厚[10-14]。王俊浩[15]采用拓扑优化法从理论层面对隔爆腔体结构进行优化,实现了隔爆腔的轻量化。此外,锂离子蓄电池发生泄压或燃爆时会在隔爆腔内产生大量黏稠、高温、腐蚀性混合物,堵塞隔爆腔间隙,造成内部压力积聚,无法释放。张勇[16]通过在隔爆腔侧面增加呼吸泄压装置,对隔爆腔结构进行防堵塞设计,提高了电池组安全性。
在煤矿锂电池管理方面,均衡管理和热管理成为影响电池续航能力和安全性能的关键技术问题。电池均衡管理主要针对磷酸铁锂电池,旨在避免电池组内单体电池出现内阻和容量等不一致现象,防止产生过充过放,影响电池续航和寿命。芮骐骅等[17]采用电阻分流型均衡技术,在充电时使低压电池尽量充满,放电时对高压电池放电,使整组电量一致。李博[18-19]采用主动均衡方式对电压较低的电池进行补偿,使整组锂离子电池性能一致。李学哲等[20]提出了一种基于容量检测和能量转移的均衡管理方案,采用能量双向转移实现电池组充放电过程的高效动态均衡。王亮等[21]提出了一种复合式分层均衡电路,实现3个相邻电池组中任意2个电池组之间的能量传递,缩短了均衡时间,提高了电池电压一致性。针对电池热管理问题,主要采用空气冷却、液体冷却、热管冷却和相变材料冷却等技术,减小温度对电池的影响,防止产生热失控,继而产生燃爆问题。一般可通过改善电池排列[22]和改善空气流动路线[23]提高散热效果。丹聃等[24]研究了基于平板热管技术的电池热管理系统,在多热源条件下,平板热管表面最大温差低于4℃,表明其具有较好的均温性,在电池热管理系统中具有较好的应用前景。凌子夜[25]选取一种基于膨胀石墨的复合相变材料,提高了材料的热导系数,提高了冷却效率。
现有研究尽管在电池防爆设计和电池管理方面取得了一定进展,但仍存在防爆设计冗余、续航能力不足等问题。为进一步优化电池结构、提高电池容量及管理水平,亟待深入研究提高电池续航能力、使用寿命及安全稳定性等关键技术。
1.3 煤矿单轨吊辅助运输系统定位技术研究现状
煤矿单轨吊在井下作业过程中,需要实时确定其位置信息,从而对单轨吊进行调度和控制。赵军[26]通过在巷道内等距离布置带有2.4 G无线射频模块的基站,使携带有该模块的单轨吊进行打卡操作,实现单轨吊定位。赵波等[27]通过在单轨吊上安装旋转式增量编码器,测量单轨吊的运行距离,对单轨吊进行定位。郭梁等[28-29]采用捷联惯导修正算法对单轨吊进行定位,利用加速度变化率阈值法对稳态加速度误差进行修正,将射频识别技术与捷联惯导进行数据融合,提高单轨吊定位精度。朱真才等[30]提出采用UWB系统车载标签和基站、捷联惯导、地图构建系统3种定位方式进行信息融合,构建精确定位卡尔曼滤波模型,对单轨吊实时位置模型进行修正,实现精确定位。
在煤矿井下复杂环境中,单一传感器定位技术存在局限性,多传感器信息融合的单轨吊定位技术研究较少,难以满足智能单轨吊精确定位要求。因此,亟待深入研究多传感器信息融合的智能单轨吊精确定位方法等关键技术。
1.4 煤矿单轨吊辅助运输系统测控技术研究现状
煤矿单轨吊测控技术是实现单轨吊自动化、智能化的关键技术。在单轨吊运行状态监测方面,现有单轨吊基本通过人工驾驶,依靠人眼判断障碍、轨道坡度等,采用机载传感器检测单轨吊的相关参数(如速度、电量、电压、温度、油压等)。单成伟等[31]设计了一套电气监测与控制装置,采用CAN总线完成设备之间的交互,实现单轨吊自动保护参数、系统压力参数、润滑油温度、液压油温度、行车倾角等统一监控。徐特[32]针对单轨吊运行时司机存在视觉盲区问题,采用超声波雷达探测器对障碍物进行检测,保证运输安全。刘泽朝等[33]针对单轨吊的荷载和轨道坡度精确识别问题,采用具有动态遗忘因子递推最小二乘和自适应扩展卡尔曼滤波的识别算法,将荷载识别值与实际运行数据相结合,动态调整轨道坡度识别值,提高了荷载和坡度识别精度。
在单轨吊运行控制方面,许多学者针对蓄电池单轨吊驱动电动机本身特性和控制系统响应慢、稳定性差等问题进行了研究。张鑫[34-35]基于管理级−控制级−设备级3级控制系统,采用模糊−矢量控制技术作为单轨吊交流电动机核心控制策略,提高了电动机控制性能;针对单轨吊开关磁阻电动机调速问题,采用单神经元自适应控制算法设计PID控制器,提高了电动机控制性能。贾倩倩等[36]通过矢量控制法建立单轨吊永磁同步电动机控制模型,将矢量控制与PID控制相结合,实现对电动机转速和转矩的控制。张露伟等[37]将异步电动机作为单轨吊驱动电动机,采用模糊PID控制器对蓄电池单轨吊的设定速度进行调节,提高了变频调速系统的调节精度与调节速度。
单轨吊辅助运输系统测控技术尽管在单轨吊检测和控制方面取得了一定研究成果,但在检测系统的完整性、实时性、准确性和在控制系统鲁棒性、适应性、稳定性等方面仍存在不足。因此,亟待深入研究单轨吊智能测控理论和方法等关键技术。
1.5 煤矿单轨吊辅助运输系统信息传输技术研究现状
通信技术是煤矿单轨吊安全可靠运行的重要保障。为了提高煤矿井下信息传输的速率和质量,学者们从通信方式和数据处理2个方面进行了一系列研究。在单轨吊系统通信技术方面,陈相蒙等[38]采用RS485总线技术和以太网通信技术,使智能通信器引出的4条网路与远程控制分站和地面监控主机通信,实现地面监控主机对井下大巷内单轨吊运输过程的实时监控和智能调度。赵思敏[39]采用ZigBee通信模块实现单轨吊与调度中心定位数据、道岔数据和交通灯数据的传输。郭梁[40]采用WiFi通信将单轨吊车载机定位数据传输至上位机,上位机对数据进行解析后实时显示单轨吊位置,实现单轨吊监控和调度。此外,在其他矿井辅助运输设备信息传输方式上,袁晓明等[41]结合5G/WiFi高速通信技术,对从地面工业广场到井下巷道的数据传输进行了现场测试。周李兵[42]提出采用4G/5G等相关蜂窝网络建立辅助运输设备数据交互网,为智能调度和远程控制提供可靠的数据传输网络。
在通信系统数据处理方面,主要包括数据的压缩和重构。梁艳等[43]提出了一种井下环境信息数据压缩算法,实验结果表明经过压缩重构后的数据与测得的数据误差较小,提高了数据传输的有效性。杨磊等[44]采用Coiflet2小波变换原理对采集图像数据进行稀疏化,采用正交匹配追踪算法和小波反变换重构图像,在有效压缩图像大小的基础上很好地还原图像。尹珠等[45]提出了一种基于小波变换的压缩感知图像处理算法,采用sym8小波基对图像进行稀疏化分块处理,通过正交匹配追踪算法和小波逆变换重构图像,以更低的采样率获得了高质量的重构图像。赵小虎等[46]采用bior4.4小波变换对煤矿井下图像信号进行分块稀疏变换,再利用正则化正交匹配追踪算法对稀疏变换的图像进行重构,在快速还原图像的基础上压缩了图像大小,提高了图像重构质量。
现有单轨吊系统的通信主要是针对一维数据的传输,但随着煤矿智能化快速发展,智能单轨吊的运行需要对大量数据进行处理及传输。因此,迫切需要深入研究适应于单轨吊的无线/有线融合组网的通信策略及快速可靠的数据处理方法。
针对煤矿井下单轨吊系统自动化、智能化水平低等问题,亟待深入研究单轨吊系统动力电池结构设计和安全可靠管理、全局与局部精确定位、智能检测与控制和多源信息传输等关键技术。
2. 智能单轨吊关键技术
智能单轨吊关键技术主要包括电池驱动、精确定位、智能测控和信息传输等,其各部分之间的逻辑关系如图2所示。
![]() 图 2 智能单轨吊关键技术逻辑关系Figure 2. Logic relationship of the key technology of intelligent monorail crane
图 2 智能单轨吊关键技术逻辑关系Figure 2. Logic relationship of the key technology of intelligent monorail crane2.1 煤矿智能单轨吊电池驱动技术
煤矿单轨吊采用电池驱动形式,面临着容量有限、过充放、能效比低等关键难题,为了使电池驱动能满足大容量、防爆、高寿命、高可靠性与高稳定性的要求,亟待破解电池驱动防爆设计、多级组合方式及电池管理等关键技术问题。
1) 在确保高防爆性能的基础上,分析紧凑结构下的多组结构、容量与续航能力之间的耦合关系,研究紧凑型、大容量、长续航的单轨吊电池物理模型和驱动方法。
2) 构建煤矿单轨吊启动、制动及运行过程中的能耗与稳定性关系模型,研究高寿命、高可靠、高稳定的单轨吊电池智能管理方法。
2.2 煤矿智能单轨吊精确定位技术
精确定位技术是确保煤矿智能单轨吊系统安全高效运行的重要保障,是实现煤矿智能单轨吊复杂环境下精准控制的重要依据。因此,如何实时获取煤矿智能单轨吊全局位姿信息和局部位置信息等成为关键。
1) 构建复杂作业环境下的煤矿智能单轨吊多传感器组合定位及其误差消除模型,研究适用于煤矿智能单轨吊运行特征与环境特征等多传感器组合的全局定位方法。
2) 构建复杂作业环境下任务驱动的煤矿智能单轨吊目标位置局部定位模型,研究适用于运行状态下多传感器融合的煤矿智能单轨吊目标位置动态识别与局部定位方法。
2.3 煤矿智能单轨吊测控技术
煤矿智能单轨吊工作状况复杂、工作环境受限,构建智能单轨吊运行状态与环境信息智能检测系统及适应多种工况的智能化控制系统,亟待破解智能单轨吊安全稳定运行和全生命周期维护的关键技术。
1) 构建智能单轨吊车体载荷、运行速度等运行状态实时检测系统,研究多源信息融合的运行状态识别方法、故障诊断方法及全生命周期智能维护与健康管理方法。
2) 构建适用于智能单轨吊的电子围栏,研究单轨吊运行状态、定位信息及环境信息融合的随动电子围栏区域实时构建方法,建立人员和障碍物识别预警机制。
3) 构建基于路况、环境与运行状态信息的智能单轨吊控制模型,研究不同工况条件下的智能单轨吊最优控制策略和自适应控制方法。
2.4 煤矿智能单轨吊信息传输技术
智能单轨吊通信与信息系统具有数据量大、多源化、高冗余等特点,研究受限空间高速单轨吊通信系统构建和多源数据高效计算、保真传输,已成为智能单轨吊多源信息实时、可靠传输的关键技术。
1) 构建煤矿井下智能单轨吊系统与地面集控中心的多跳无线/有线转接通信模型,研究煤矿智能单轨吊数据无线/有线传输方法。
2) 构建智能单轨吊复杂工况条件下多源数据压缩与重构模型,研究高效的数据处理算法和多源大数据协同计算方法。
3. 智能单轨吊关键技术解决方案
针对煤矿智能单轨吊电池驱动、精确定位、智能测控和信息传输等关键技术问题,提出煤矿智能单轨吊锂电池防爆及电池管理、全局与局部融合精确定位、多传感器信息融合智能测控、边缘计算信息传输等解决方案。
3.1 煤矿智能单轨吊锂电池防爆及电池管理技术
1) 智能单轨吊大容量锂电池结构与防爆设计方法。建立满足煤矿智能单轨吊长续航、大负载要求的大容量模块化锂电池组合拓扑结构,构建基于空间、容量、续航与安全等多因素约束下的防爆锂电池系统结构设计模型,提出基于变密度法[47]的防爆外壳结构拓扑优化方法(图3),解决紧凑结构下电池容量与续航性能匹配问题。
![]() 图 3 基于变密度法的防爆外壳结构拓扑优化方法Figure 3. Topology optimization method of explosion proof enclosure structure based on variable density method
图 3 基于变密度法的防爆外壳结构拓扑优化方法Figure 3. Topology optimization method of explosion proof enclosure structure based on variable density method2) 智能单轨吊大容量锂电池均衡管理技术。建立充放电特征和电池均衡状态之间的映射关系,提出电池均衡状态预测及控制方法,构建基于改进麻雀搜索算法[48]的煤矿智能单轨吊大容量锂电池均衡管理模型(图4)。融合遗传算法构建均衡管理方案寻优模型,建立大容量锂电池均衡管理高效动态调整方法,实时获取与执行最优锂电池均衡管理方案;构建基于支持向量机的电池容量与健康状态估计模型,提出电池状态的实时监测和精确预测方法,确保煤矿智能单轨吊大容量锂电池的长寿命和高稳定性。
![]() 图 4 基于改进麻雀种群算法的煤矿智能单轨吊锂电池均衡管理方法Figure 4. A balanced management method for lithium battery of intelligent monorail crane in coal mines based on improved sparrow population algorithm
图 4 基于改进麻雀种群算法的煤矿智能单轨吊锂电池均衡管理方法Figure 4. A balanced management method for lithium battery of intelligent monorail crane in coal mines based on improved sparrow population algorithm3.2 煤矿智能单轨吊精准定位技术
1) 基于惯导+里程计的煤矿单轨吊全局定位技术。建立煤矿智能单轨吊初始位置坐标,解算基于惯导信息的初始姿态转换矩阵;构建里程计速度信息与惯导姿态转换矩阵的煤矿智能单轨吊航位信息解算模型;提出基于全站仪+激光标靶信息的煤矿单轨吊终点目标位置惯导坐标信息修正方法;构建基于改进自适应卡尔曼滤波的惯性导航定位误差补偿模型,建立最优自适应因子的测量系统迭代方程,实现初始与目标位置的惯导初始对准与累计误差消除,构建基于惯导与里程计融合的煤矿智能单轨吊全局定位模型,解决煤矿智能单轨吊高效精准的全局定位问题,如图5所示。
![]() 图 5 基于多传感器组合的煤矿智能单轨吊全局定位方法Figure 5. Global positioning method for intelligent monorail crane in coal mines based on multi-sensor combination
图 5 基于多传感器组合的煤矿智能单轨吊全局定位方法Figure 5. Global positioning method for intelligent monorail crane in coal mines based on multi-sensor combination2) 基于机器视觉+UWB的智能单轨吊局部定位技术。构建目标位置与单轨吊之间的双边双向UWB测距模型,以及巷道多UWB基站与单轨吊UWB设备之间的三边定位模型,获取单轨吊与巷道间的距离与位置信息;融合煤矿智能单轨吊视觉定位标靶信息,提出基于改进卡尔曼滤波的视觉+UWB融合局部定位方法,建立机器视觉+UWB多传感器融合的煤矿智能单轨吊起始与终止目标位置感知系统(图6),解决煤矿智能单轨吊在目标位置的局部定位问题。
![]() 图 6 基于多传感器融合的煤矿智能单轨吊局部定位方法Figure 6. Local positioning method for intelligent monorail crane in coal mines based on multi-sensor fusion
图 6 基于多传感器融合的煤矿智能单轨吊局部定位方法Figure 6. Local positioning method for intelligent monorail crane in coal mines based on multi-sensor fusion3.3 煤矿智能单轨吊测控技术
1) 智能单轨吊多传感器检测系统。提出基于参数递推最小二乘法的智能单轨吊运行状态信息在线识别方法;构建系统噪声协方差和误差协方差动态更新模型,提出基于二阶近似扩展卡尔曼滤波的降噪方法和基于多粒度粗糙集的多源信息融合方法。建立多源检测信息融合的故障诊断模型和运行状态评估模型,提出智能单轨吊全生命周期预知维护与健康管理方法。构建面向智能单轨吊机械特性与电气特性的多传感器融合的多层级智能检测系统(图7),实现智能单轨吊运行状态的实时感知与全生命周期的智能管理。
![]() 图 7 煤矿单轨吊多传感器智能检测方法Figure 7. Intelligent detection scheme for multi sensor of coal mine monorail crane
图 7 煤矿单轨吊多传感器智能检测方法Figure 7. Intelligent detection scheme for multi sensor of coal mine monorail crane2) 智能单轨吊随动电子围栏与预警技术。构建激光雷达测距、红外与可见光视觉多信息融合的单轨吊随动电子围栏模型,提出基于运行参数、人员分布等信息的电子围栏动态区域划分方法;建立煤矿智能单轨吊电子围栏动态调整机制,提出基于环境信息、运行状态及位姿信息驱动的电子围栏区域更新方法,以适应智能单轨吊不同运行状态下的有效预警(图8)。构建智能单轨吊电子围栏随动数据与环境信息融合的防侵入预警模型,提出基于信道状态信息与图像信息融合的障碍物和人员入侵电子围栏区域检测预警方法,确保智能单轨吊安全运行。
![]() 图 8 煤矿智能单轨吊随动电子围栏与预警方法Figure 8. Technical scheme for intelligent monorail crane follow-up electronic fence and warning in coal mines
图 8 煤矿智能单轨吊随动电子围栏与预警方法Figure 8. Technical scheme for intelligent monorail crane follow-up electronic fence and warning in coal mines3) 基于多信息融合的单轨吊智能控制方法。构建融合路况信息、运行状态信息及电子围栏预警信息的单轨吊全局速度规划模型,建立基于路况与载荷融合的局部速度控制方法;建立路况信息数据库,提出单轨吊路况分类方法及不同路况的模糊矢量速度控制方法,引入能效约束,构建单轨吊智能控制模型(图9),实现智能单轨吊安全高效自适应控制。
![]() 图 9 煤矿单轨吊智能控制方法Figure 9. Intelligent control technology scheme for coal mine monorail crane
图 9 煤矿单轨吊智能控制方法Figure 9. Intelligent control technology scheme for coal mine monorail crane3.4 煤矿智能单轨吊通信技术
1) 建立融合5G网络的煤矿智能单轨吊“本地−近程−地面”通信系统。建立“本地−近程”短距离通信的数据传输模型,提出无线/有线混合的“本地−近程”信息传输方法;建立基于井下工业环网的“近程−地面”远程信息传输模型,提出多跳有线/无线“近程−地面”远程信息传输方法,构建智能单轨吊“本地−近程−地面”三级传输通信系统架构(图10),实现智能单轨吊信息实时有效传输。
2) 煤矿智能单轨吊数据传输方法。构建基于一维数据和多维数据特征的计算资源分配与计算任务调度优化模型,提出无迹卡尔曼滤波与小波变换的一维数据压缩模型和GAN网络与稀疏字典的图像压缩方法;提出基于逆小波变换的一维数据重构方法和基于稀疏贝叶斯的多维数据重构方法,构建基于边缘计算的分布式数据计算及传输系统(图11)。实现智能单轨吊数据实时保真传输。
![]() 图 11 基于边缘计算的分布式数据计算及传输方法Figure 11. Distributed data computing and transmission method based on edge computing
图 11 基于边缘计算的分布式数据计算及传输方法Figure 11. Distributed data computing and transmission method based on edge computing4. 结论
1) 针对井下动力电池防爆设计冗余、续航能力不足等问题,提出了基于变密度法的防爆外壳结构拓扑优化方法、基于改进麻雀搜索算法和遗传算法融合的均衡管理方法、基于支持向量机的电池容量与健康状态估计方法,实现对电池状态的实时监测精准管理。
2) 针对单轨吊定位精度不高的问题,提出了基于改进自适应卡尔曼滤波的惯导+里程计融合的全局定位方法;构建了全站仪+激光标靶信息的单轨吊终点目标位置惯导坐标信息修正模型,提出了基于改进卡尔曼滤波的视觉+UWB融合局部定位方法,实现智能单轨吊全局与局部精确定位。
3) 针对复杂多工况条件下煤矿智能单轨检测系统实时性、准确性和控制系统鲁棒性、稳定性不足等问题,构建了多传感器融合的智能检测系统,提出了基于参数递推最小二乘法与二阶近似扩展卡尔曼滤波降噪的单轨吊运行状态信息在线识别方法;提出了基于多粒度粗糙集多源信息融合的智能单轨吊全生命周期预知维护与健康管理方法;提出了基于运行参数、人员分布等信息的随动电子围栏构建与预警方法;提出了融合载荷信息、路况信息、运行状态信息、电子围栏预警信息的单轨吊全局与局部速度控制模型及模糊矢量速度控制方法、节能控制方法,实现智能单轨吊的精准检测与可靠控制。
4) 针对智能单轨吊多源信息可靠传输问题,构建了融合5G网络的智能单轨吊“本地−近程−地面”通信架构,建立了基于数据特征的计算资源分配与计算任务调度优化模型,提出了基于边缘计算的分布式数据计算及传输方法;建立了基于无迹卡尔曼滤波与小波变换的一维数据压缩模型和基于GAN网络与稀疏字典的图像压缩模型;提出了基于逆小波变换的一维数据重构方法和基于稀疏贝叶斯的多维数据重构方法,实现智能单轨吊多源信息远程可靠传输。
-
![]()
图 6 不同目标检测模型检测结果对比
Figure 6. Comparison of detection results of different object detection models
表 1 实验平台配置
Table 1 Experimental platform configuration
配置 参数 操作系统 Windows10 CPU Intel Core i7−12700K GPU NVIDIA GeForce RTX 3060 内存 32 GiB GPU加速工具 CUDA11.1  下载: 导出CSV
下载: 导出CSV
表 2 消融实验结果
Table 2 Ablation experiment results
% YOLOv8n DSConv 检测头 PSA 精确率 召回率 mAP50 √ × × × 86.9 85.9 89.1 √ √ × × 87.4 89.3 89.7 √ √ √ × 88.0 90.1 91.1 √ √ √ √ 89.3 91.3 92.4
下载: 导出CSV
表 3 不同目标检测模型对5种类别目标检测的AP对比
Table 3 Average precision (AP) comparison of detecting five categories by use of different object detection models
% 类别 Faster−
RCNNYOLOv5s YOLOv7 YOLOv8n 改进YOLOv8n 人员 84.2 92.9 94.2 97.7 98.3 安全帽 80.7 90.1 91.7 93.7 95.8 矿灯 68.7 76.6 76.3 79.8 89.9 口罩 74.3 82.9 83.9 86.2 87.2 自救器 73.3 81.7 81.4 85.1 90.8 mAP50 79.2 85.6 86.3 89.1 92.4
下载: 导出CSV
表 4 不同目标检测模型的检测性能对比
Table 4 Comparison of detection performance of different object detection models
模型 参数量/MiB GFLOPs mAP/% 检测速度/(帧·s−1) Faster R−CNN 53.0 887.5 79.2 7 YOLOv5s 7.2 16.0 85.6 59 YOLOv7 36.9 104.7 86.3 142 YOLOv8n 3.0 8.1 89.1 457 改进YOLOv8n 3.4 13.3 92.4 208
下载: 导出CSV
-
[1] 郝帅,杨晨禄,赵秋林,等. 基于双分支头部解耦和注意力机制的灾害环境人体检测[J]. 西安科技大学学报,2023,43(4):797-806. HAO Shuai,YANG Chenlu,ZHAO Qiulin,et al. Pedestrian detection method in disaster environment based on double branch decoupled head and attention mechanism[J]. Journal of Xi'an University of Science and Technology,2023,43(4):797-806.
[2] 罗南超,郑伯川. 视频监控领域深度特征编码的行人检测算法[J]. 西安科技大学学报,2019,39(4):701-707. LUO Nanchao,ZHENG Bochuan. Deep feature coding for pedestrian detection in video surveillance[J]. Journal of Xi'an University of Science and Technology,2019,39(4):701-707.
[3] 程德强,寇旗旗,江鹤,等. 全矿井智能视频分析关键技术综述[J]. 工矿自动化,2023,49(11):1-21. CHENG Deqiang,KOU Qiqi,JIANG He,et al. Overview of key technologies for mine-wide intelligent video analysis[J]. Journal of Mine Automation,2023,49(11):1-21.
[4] 赵伟,王爽,赵东洋. 基于SD−YOLOv5s−4L的煤矿井下无人驾驶电机车多目标检测[J]. 工矿自动化,2023,49(11):121-128. ZHAO Wei,WANG Shuang,ZHAO Dongyang. Multi object detection of underground unmanned electric locomotives in coal mines based on SD-YOLOv5s-4L[J]. Journal of Mine Automation,2023,49(11):121-128.
[5] REDMON J,DIVVALA S,GIRSHICK R,et al. You only look once:unified,real-time object detection[C]. The IEEE Conference on Computer Vision and Pattern Recognition,Las Vegas,2016:779-788.
[6] REDMON J,FARHADI A. YOLO9000:better,faster,stronger[C]. The IEEE Conference on Computer Vision and Pattern Recognition,Honolulu,2017:7263-7271.
[7] REDMON J,FARHADI A. Yolov3:an incremental improvement[EB/OL]. [2024-04-23]. https://pjreddie.com/media/files/papers/YOLOv3.pdf.
[8] BOCHKOVSKIY A, WANG C Y, LIAO H Y M. Yolov4: optimal speed and accuracy of object detection [Z/OL]. [2024-05-23]. https://doi.org/10.48550/arXiv. 2004.10934.
[9] REN Shaoqing,HE Kaiming, GIRSHICK R,et al. Faster R-CNN:towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2017,39(6):1137-1149.
[10] HE Kaiming,ZHANG Xiangyu,REN Shaoqing,et al. Deep residual learning for image recognition[C]. The IEEE Conference on Computer Vision and Pattern Recognition,Las Vegas,2016:770-778.
[11] HUANG Gao,LIU Zhuang,VAN DER MAATEN L,et al. Densely connected convolutional networks[C]. The IEEE Conference on Computer Vision and Pattern Recognition,Honolulu,2017:4700-4708.
[12] HOWARD A G,ZHU Menglong,CHEN Bo,et al. Mobilenets:efficient convolutional neural networks for mobile vision applications[Z/OL]. [2024-04-23]. https://arxiv.org/pdf/1704.04861.
[13] 崔铁军,王凌霄. YOLOv4目标检测算法在煤矿工人口罩佩戴监测工作中的应用研究[J]. 中国安全生产科学技术,2021,17(10):66-71. CUI Tiejun,WANG Lingxiao. Research on application of YOLOv4 object detection algorithm in monitoring on masks wearing of coal miners[J]. Journal of Safety Science and Technology,2021,17(10):66-71.
[14] 李熙尉,孙志鹏,王鹏,等. 基于YOLOv5s改进的井下人员和安全帽检测算法研究[J]. 煤,2023,32(3):22-25. DOI: 10.3969/j.issn.1005-2798.2023.03.006 LI Xiwei,SUN Zhipeng,WANG Peng,et al. Research on underground personnel and safety helmet detection algorithm based on YOLOv5s improvement[J]. Coal,2023,32(3):22-25. DOI: 10.3969/j.issn.1005-2798.2023.03.006
[15] 曹帅,董立红,邓凡,等. 基于YOLOv7−SE的煤矿井下场景小目标检测方法[J]. 工矿自动化,2024,50(3):35-41. CAO Shuai,DONG Lihong,DENG Fan,et al. A small object detection method for coal mine underground scene based on YOLOv7-SE[J]. Journal of Mine Automation,2024,50(3):35-41.
[16] 王科平,连凯海,杨艺,等. 基于改进YOLOv4的综采工作面目标检测[J]. 工矿自动化,2023,49(2):70-76. WANG Keping,LIAN Kaihai,YANG Yi,et al. Target detection of the fully mechanized working face based on improved YOLOv4[J]. Journal of Mine Automation,2023,49(2):70-76.
[17] 顾清华,何鑫鑫,王倩,等. 基于改进YOLOv5的煤矿井下暗环境矿工安全穿戴智能识别[J]. 矿业研究与开发,2024,44(3):201-208. GU Qinghua,HE Xinxin,WANG Qian,et al. Research on intelligent recognition of safety wearing of miners in dark enviroment of coal mine based on improved YOLOv5[J]. Mining Research and Development,2024,44(3):201-208.
[18] 寇发荣,肖伟,何海洋,等. 基于改进YOLOv5的煤矿井下目标检测研究[J]. 电子与信息学报,2023,45(7):2642-2649. DOI: 10.11999/JEIT220725 KOU Farong,XIAO Wei,HE Haiyang,et al. Research on target detection in underground coal mines based on improved YOLOv5[J]. Journal of Electronics & Information Technology,2023,45(7):2642-2649. DOI: 10.11999/JEIT220725
[19] GE Zheng,LIU Songtao,WANG Feng,et al. Yolox:Exceeding YOLO series in 2021[Z/OL]. [2024-04-23]. https://arxiv.org/pdf/2107.08430.
[20] YU F,KOLTUN V. Multi-scale context aggregation by dilated convolutions[Z/OL]. [2024-04-23]. https://arxiv.org/pdf/1511.07122.
[21] DAI Jifeng,QI Haozhi,XIONG Yuwen,et al. Deformable convolutional networks[C]. The IEEE International Conference on Computer Vision,Venice,2017:764-773.
[22] QI Yaolei,HE Yuting,QI Xiaoming,et al. Dynamic snake convolution based on topological geometric constraints for tubular structure segmentation[C]. The IEEE/CVF International Conference on Computer Vision,Paris,2023:6070-6079.
[23] LIU Huajun,LIU Fuqiang,FAN Xinyi,et al. Polarized self-attention:towards high-quality pixel-wise regression[Z/OL]. [2024-04-23]. https://arxiv.org/pdf/2107.00782.
-
期刊类型引用(19)
1. 叶庆春,邓海顺,黄志祥. 单轨吊斜坡运输下承载小车力学特性分析. 煤炭技术. 2025(02): 211-214 .  百度学术
百度学术
2. 蔡晓晴. 井下单轨吊机车的现状与应用. 能源与节能. 2025(03): 241-243+247 . 百度学术
3. 金志伟. 智能矿山建设中的机械自动化技术研究. 现代制造技术与装备. 2025(03): 180-182 . 百度学术
4. 张文兵. 信息化背景下煤矿机电运输事故原因及管理措施. 能源与节能. 2025(05): 296-299 . 百度学术
5. 方同辉,周航,陈永浦,尹可强,邓海顺. 矿用电动单轨吊动力电池监控系统的研究. 煤矿机电. 2024(01): 15-19 . 百度学术
6. 阮学云,卢毅. 矿用单轨吊气动道岔的结构设计与研究. 佳木斯大学学报(自然科学版). 2024(03): 58-61 . 百度学术
7. 王玉强,李宁,李才华,褚乐乐. 单轨吊机车旋转起吊梁结构设计及力学分析. 煤矿机械. 2024(06): 86-88 . 百度学术
8. 刘威,靳华伟,曹铸. 煤矿单轨吊智能监测系统研究. 菏泽学院学报. 2024(02): 31-36 . 百度学术
9. 山耀宾,王晶,李宁,褚乐乐. 多点驱动锂电池单轨吊机车系统研究与应用. 中国设备工程. 2024(11): 144-146 . 百度学术
10. 王玉强,孟涛,陈钦亮,王公印. 单轨吊运人车减振承载梁结构设计与力学分析. 煤矿机械. 2024(07): 88-91 . 百度学术
11. 刘瑭,刘卓然,刘康. 井工煤矿单轨吊机车无人驾驶系统的设计与应用研究. 内蒙古煤炭经济. 2024(09): 148-150 . 百度学术
12. 郑贵军,蔡松,杨辰,袁益平,胡刚,曾勇,叶文凯. 矿用单轨吊智能驾驶系统设计. 中国机械. 2024(17): 18-21 . 百度学术
13. 葛德志,李宁,宋强. 煤矿单轨吊锂电池箱起吊运载梁结构设计与力学分析. 山东煤炭科技. 2024(06): 89-92+97 . 百度学术
14. 吴胜. 基于改进YOLOv8的煤矿输送带异物目标检测方法研究. 选煤技术. 2024(03): 29-34 . 百度学术
15. 韩鹏. 矿用单轨吊系统的设计及运输能力验证. 机械管理开发. 2024(06): 226-227+230 . 百度学术
16. 王茂森,鲍久圣,章全利,杨阳,袁晓明,阴妍,张可琨,葛世荣. 煤矿井下单轨吊无人驾驶目标识别算法与轨道接缝检测方法. 煤炭学报. 2024(S1): 457-471 . 百度学术
17. 于国振,李东升. 煤矿辅助运输系统中高速单轨吊混合动力控制方法研究. 中国机械. 2024(35): 91-94 . 百度学术
18. 吕玉寒,张牧野,鲍久圣,杨阳,杨健健,王茂森. 基于UKF滤波加权C-T融合算法的无人驾驶单轨吊双标签UWB定位. 煤炭科学技术. 2024(S2): 221-235 . 百度学术
19. 李哲. 复杂煤矿环境中单轨吊车吊挂的应用方案研究. 自动化应用. 2023(21): 95-97 . 百度学术
其他类型引用(4)













计量
- 文章访问数: 153
- HTML全文浏览量: 86
- PDF下载量: 29
- 被引次数: 23
