Multi-source information fusion based underground autonomous mapping and localization method
-
摘要:
由于煤矿井下环境恶劣,基于单源里程信息的建图方法易出现偏移、遮挡、缺失语义特征等现象,现有主流定位算法应用于煤矿井下时存在定位失准等现象。针对上述问题,提出一种基于多源信息融合的井下无人驾驶建图与定位方法。采用基于多源信息融合的RTAB−Map算法建图,通过融合点云与图像信息,显著降低建图偏移,提高特征捕捉能力;采用自适应蒙特卡罗定位(AMCL)算法实现精准定位,结合激光雷达与运动信息,利用粒子滤波、位姿预测与重采样实现自适应定位,减少定位失准和建图漂移问题。仿真及试验结果表明:相较单一轮式里程计,基于多源信息融合的RTAB−Map建图相对误差绝对值缩减到1%以内,地图匹配度更高,提升了建图可靠性;基于AMCL算法的定位粒子能够在2 m内迅速收敛,满足无人驾驶辅助运输车辆的定位要求。
-
关键词:
- 井下无人驾驶 /
- SLAM /
- 多源信息融合 /
- RTAB−Map算法 /
- AMCL算法
Abstract:Due to the harsh environment in coal mines underground, mapping methods based on single-source odometry information are prone to issues such as drift, occlusion, and missing semantic features. Existing mainstream localization algorithms applied underground in coal mines often encounter localization errors. To address these issues, this paper proposed an underground autonomous mapping and localization method based on multi-source information fusion. The mapping was performed using the multi-source information fusion-based RTAB-Map algorithm, which significantly reduced mapping drift and improved feature capture ability by fusing point cloud and image data. Precise localization was achieved using the Adaptive Monte Carlo Localization (AMCL) algorithm, which combined LiDAR and motion information and employed particle filtering, pose prediction and resampling to achieve adaptive localization, thereby reducing localization inaccuracies and mapping drift. Simulation and experimental results showed that, compared with a single wheel odometry, the absolute value of the relative error of RTAB-Map mapping based on multi-source information fusion was reduced to within 1%, and the map matching accuracy was higher, improving mapping reliability. Particles using the AMCL algorithm converged rapidly within 2 meters, meeting the localization requirements of autonomous auxiliary transport vehicles.
-
-
![]()
图 7 基于轮式里程计的RTAB−Map建图仿真效果
Figure 7. Simulation result of RTAB-Map mapping based on wheel odometer
![]()
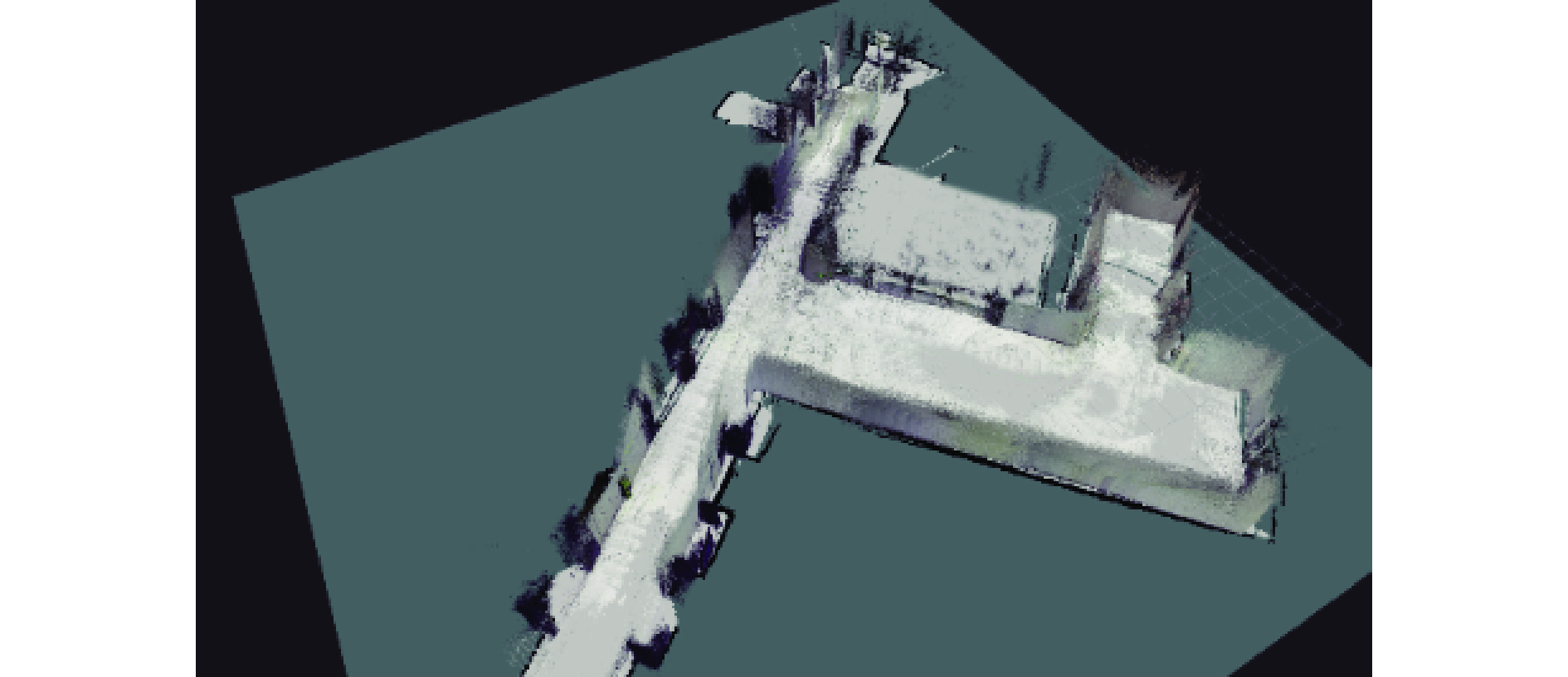
图 8 基于多源信息融合的RTAB−Map建图仿真效果
Figure 8. Simulation result of RTAB-Map mapping based on multi-source information fusion
![]()
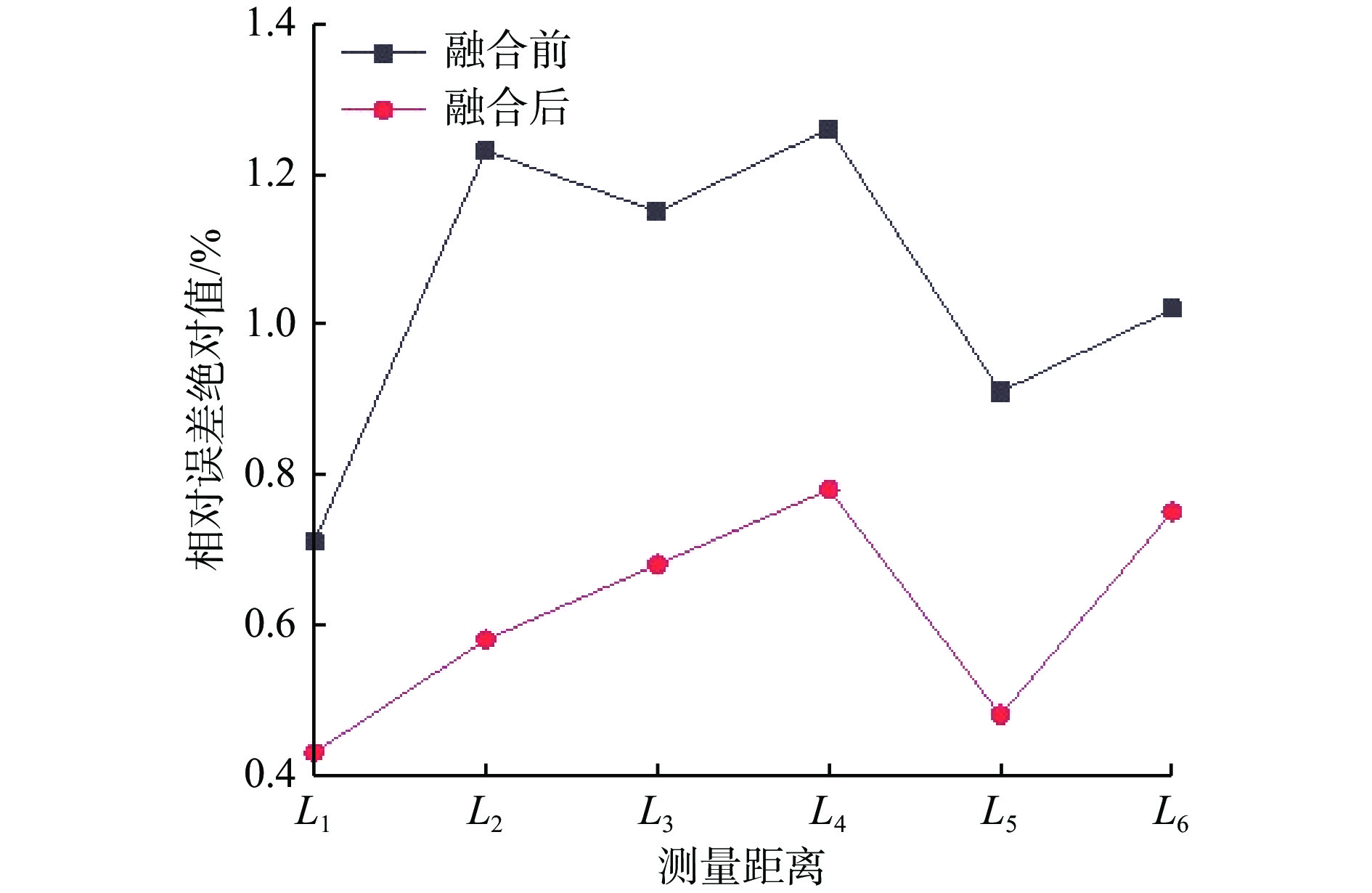
图 9 融合多源信息前后仿真误差绝对值对比
Figure 9. Comparison of absolute simulation errors before and after multi-source information fusion
![]()
图 13 基于轮式里程计的RTAB−Map建图试验效果
Figure 13. Test results of RTAB-Map mapping based on wheel odometer
![]()
图 14 基于多源信息融合的RTAB−Map建图试验效果
Figure 14. Test results of RTAB-Map mapping based on multi-source information fusion
![]()
图 15 融合多源里程计前后试验误差绝对值对比
Figure 15. Comparison of absolute values of test errors before and after fusion of multi-source odometry
表 1 基于轮式里程计的RTAB−Map建图仿真误差
Table 1 RTAB-Map mapping simulation errors based on wheel odometer
测量距离 实际值/cm 图测值/cm 绝对误差/cm 相对误差绝对值/% L1 242 243.4 +1.4 0.72 L2 692 695.1 +3.1 0.45 L3 371 368.1 −2.9 0.78 L4 957 958.1 +1.1 0.11 L5 1 538 1 524.7 −13.3 0.86 L6 1 834 1 811.1 +22.9 1.24  下载: 导出CSV
下载: 导出CSV
表 2 基于多源信息融合的RTAB−Map建图仿真误差
Table 2 RTAB-Map mapping simulation errors based on multi-source information fusion
测量距离 实际值/cm 图测值/cm 绝对误差/cm 相对误差绝对值/% L1 242 242.5 +0.5 0.21 L2 692 693.5 +1.5 0.22 L3 371 370.5 −0.5 0.13 L4 957 957.7 +0.7 0.07 L5 1 538 1 534.7 −3.3 0.21 L6 1 834 1 823.5 −10.5 0.57
下载: 导出CSV
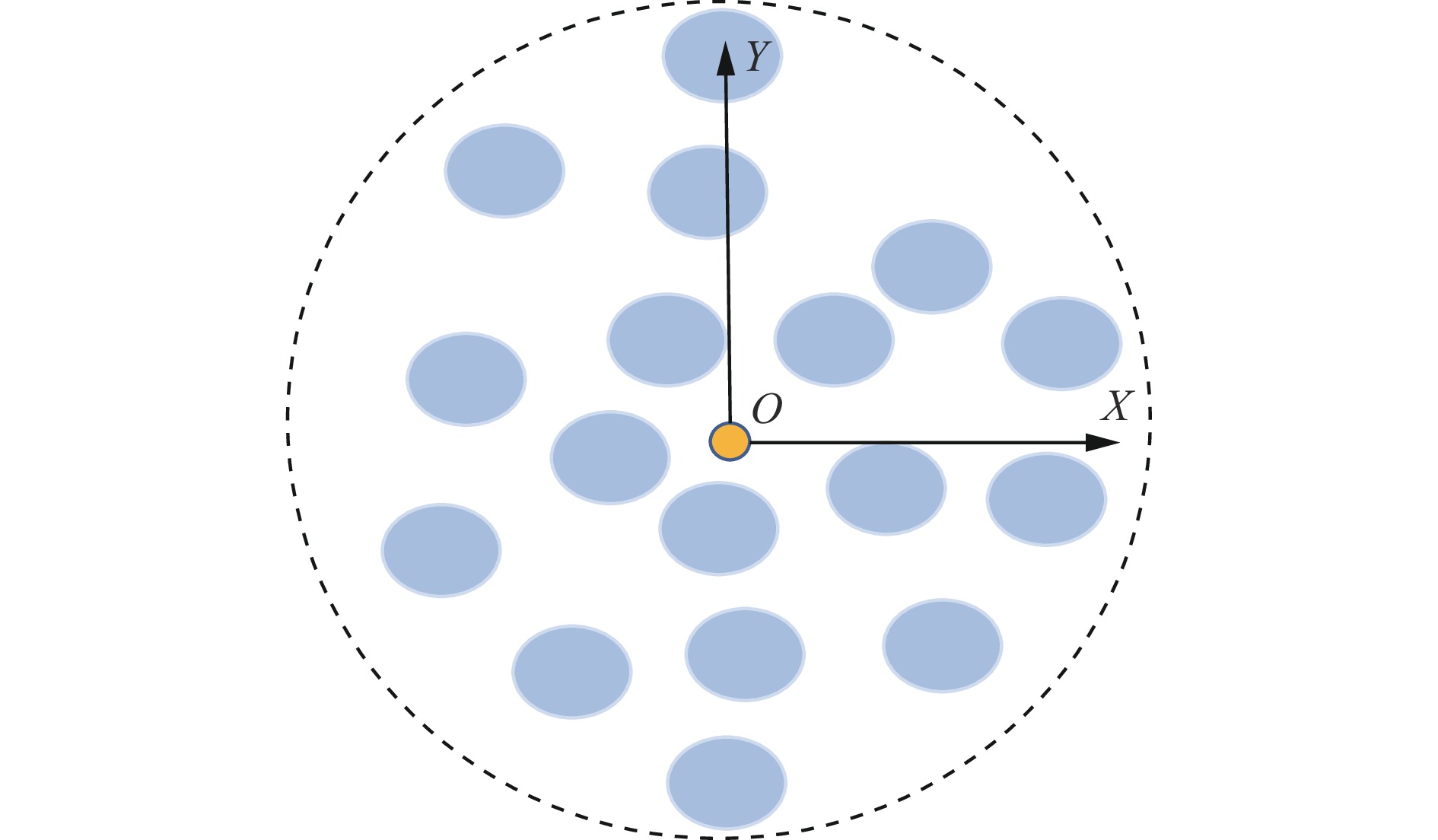
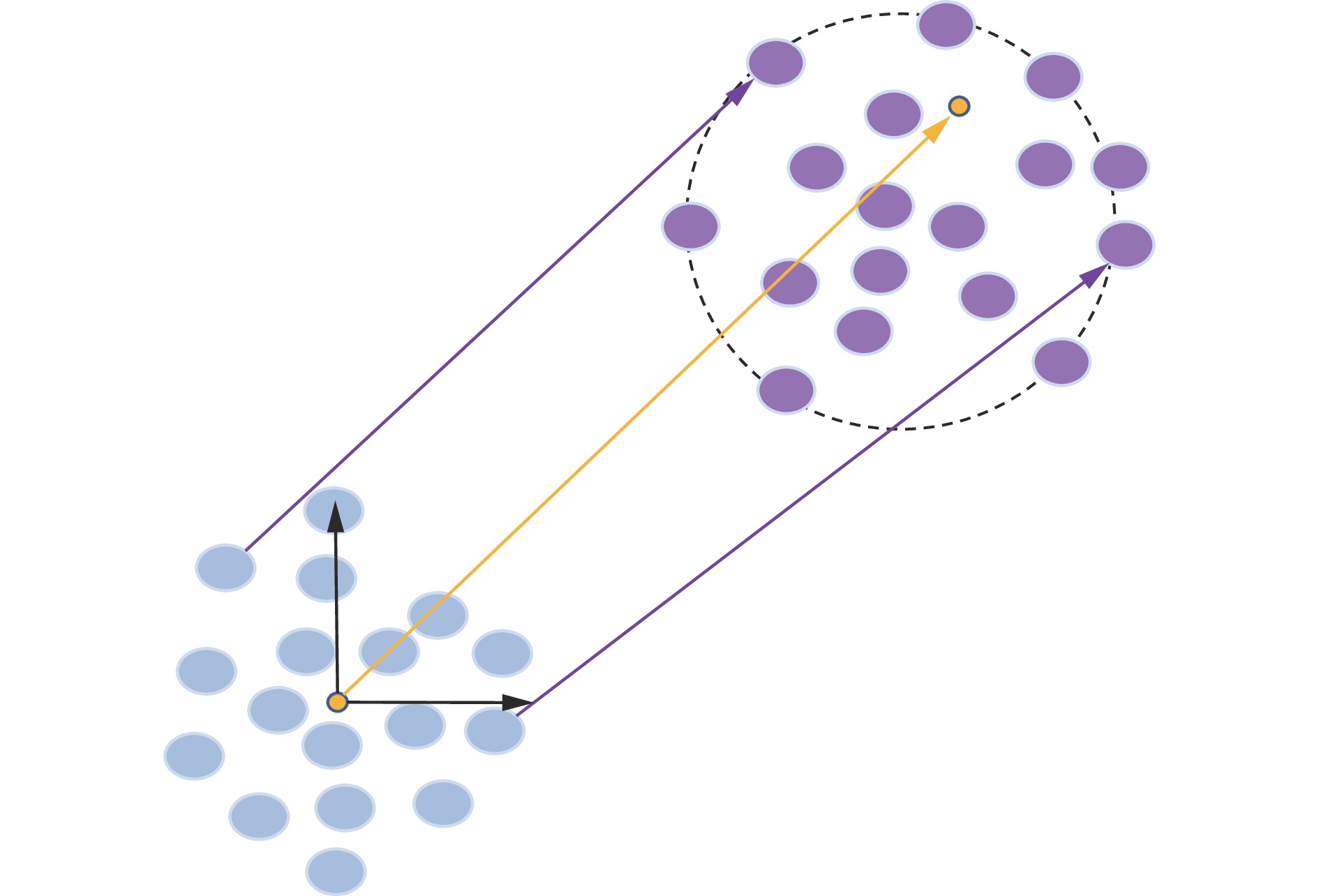
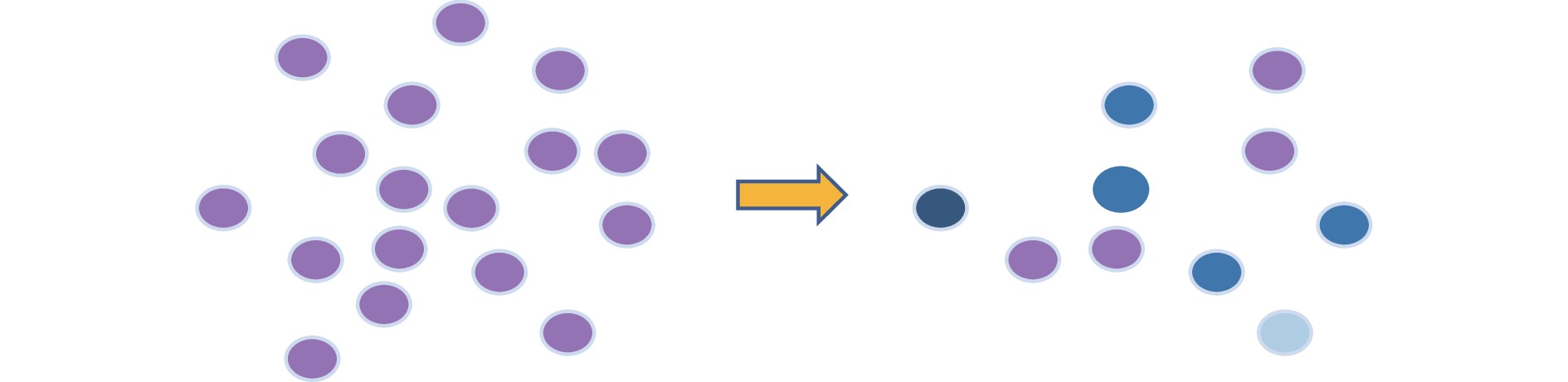
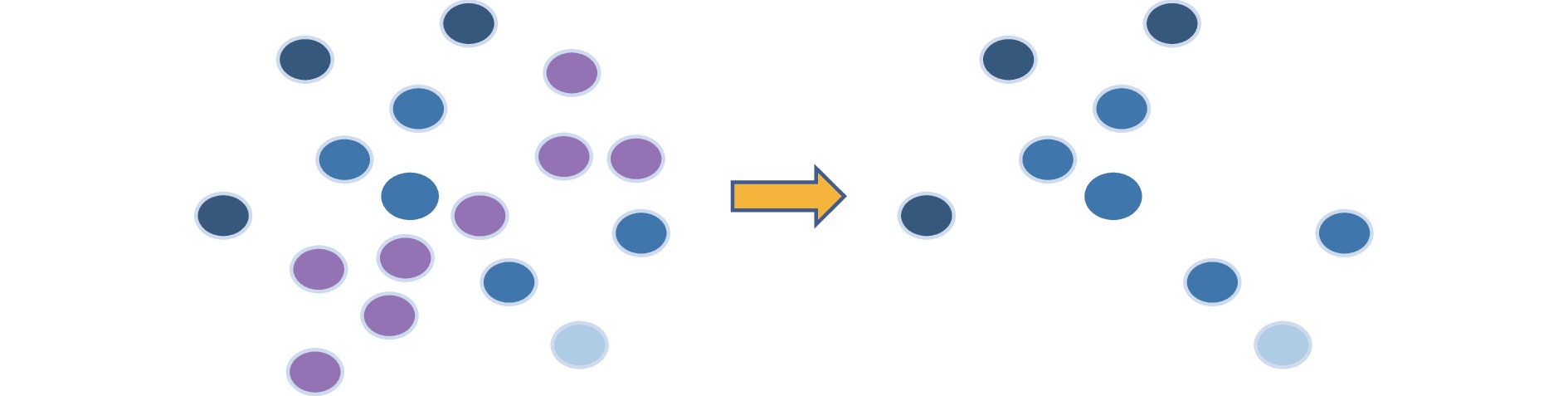
表 3 AMCL算法在不同阶段的收敛效果(仿真)
Table 3 Convergence performance of AMCL localization algorithm at different stages (simulation)
下载: 导出CSV
表 4 基于轮式里程计的RTAB−Map建图试验误差
Table 4 Error in RTAB-Map mapping test based on wheel odometer
测量距离 实际值/cm 图测值/cm 绝对误差/cm 相对误差绝对值/% L1 356 358.6 +2.6 0.72 L2 692 699.1 +7.1 1.03 L3 251 248.1 −2.9 1.15 L4 798 808.1 +10.1 1.27 L5 1216 1204.7 −11.3 0.93 L6 1793 1811.1 +18.1 1.01
下载: 导出CSV
表 5 基于多源信息融合的RTAB−Map建图试验误差
Table 5 Error in RTAB-Map mapping experiment based on multi-source information fusion
测量距离 实际值/cm 图测值/cm 绝对误差/cm 相对误差绝对值/% L1 356 357.5 +1.5 0.43 L2 692 687.8 −4.2 0.60 L3 251 249.2 −1.8 0.71 L4 798 804.6 +6.6 0.83 L5 1216 1209.7 −6.3 0.52 L6 1793 1803.9 +10.9 0.61
下载: 导出CSV
表 6 AMCL算法在不同阶段的收敛效果(试验)
Table 6 Convergence effect of AMCL algorithm at different stages (test)
下载: 导出CSV
表 7 基于不同信息源的建图误差
Table 7 Mapping errors based on different information sources
实验组别 平均绝对误差/cm 相对误差/% 激光+IMU 12.3 2.1 相机+IMU 9.7 1.4 激光+相机 5.8 0.8 多源融合 3.1 0.4
下载: 导出CSV
表 8 不同速度条件下的建图误差
Table 8 Mapping errors at different speed conditions
速度/(km·h−1) 绝对轨迹误差/cm 收敛距离/m 最大瞬时误差/cm 10 7.2 4.2 27.9 30 7.6 4.5 28.1 40 7.8 4.8 28.4
下载: 导出CSV
-
[1] 王国法. 煤矿智能化最新技术进展与问题探讨[J]. 煤炭科学技术,2022,50(1):1-27. DOI: 10.3969/j.issn.0253-2336.2022.1.mtkxjs202201001 WANG Guofa. New technological progress of coal mine intelligence and its problems[J]. Coal Science and Technology,2022,50(1):1-27. DOI: 10.3969/j.issn.0253-2336.2022.1.mtkxjs202201001
[2] 王陈,鲍久圣,袁晓明,等. 无轨胶轮车井下无人驾驶系统设计及控制策略研究[J]. 煤炭学报,2021,46(增刊1):520-528. WANG Chen,BAO Jiusheng,YUAN Xiaoming,et al. Design and control strategy of underground driverless system for trackless rubber tire vehicle[J]. Journal of China Coal Society,2021,46(S1):520-528.
[3] 鲍久圣,章全利,葛世荣,等. 煤矿井下无人化辅助运输系统关键基础研究及应用实践[J]. 煤炭学报,2023,48(2):1085-1098. BAO Jiusheng,ZHANG Quanli,GE Shirong,et al. Basic research and application practice of unmanned auxiliary transportation system in coal mine[J]. Journal of China Coal Society,2023,48(2):1085-1098.
[4] 韦晓琴. 基于激光雷达的AGV机器人SLAM与定位导航研究[D]. 广州:华南理工大学,2019. WEI Xiaoqin. Research on SLAM,localization and navigation of an AGV robot based on laser sensors[D]. Guangzhou:South China University of Technology,2019.
[5] 王陈. 井下无人驾驶无轨胶轮车自主建图与导航技术研究[D]. 徐州:中国矿业大学,2022. WANG Chen. Research on autonomous mapping and navigation technology of underground driverless trackless rubber-tyred vehicle[D]. Xuzhou:China University of Mining and Technology,2022.
[6] 李仲强. 煤矿救援机器人自主建图和导航技术研究[D]. 淮南:安徽理工大学,2019. LI Zhongqiang. Research on self-construction and navigation technology of coal mine rescue robot[D]. Huainan:Anhui University of Science & Technology,2019.
[7] 刘停. 基于机器视觉的井下救援探测机器人路径规划研究[D]. 徐州:中国矿业大学,2017. LIU Ting. Research on path planning of mine rescue detection robot based on machine vision[D]. Xuzhou:China University of Mining and Technology,2017.
[8] 胡青松,李敬雯,张元生,等. 面向矿井无人驾驶的IMU与激光雷达融合SLAM技术[J]. 工矿自动化,2024,50(10):21-28. HU Qingsong,LI Jingwen,ZHANG Yuansheng,et al. IMU-LiDAR integrated SLAM technology for unmanned driving in mines[J]. Journal of Mine Automation,2024,50(10):21-28.
[9] 田野,陈宏巍,王法胜,等. 室内移动机器人的SLAM算法综述[J]. 计算机科学,2021,48(9):223-234. DOI: 10.11896/jsjkx.200700152 TIAN Ye,CHEN Hongwei,WANG Fasheng,et al. Overview of SLAM algorithms for mobile robots[J]. Computer Science,2021,48(9):223-234. DOI: 10.11896/jsjkx.200700152
[10] MARTÍN F,MORENO L,BLANCO D,et al. Kullback-Leibler divergence-based global localization for mobile robots[J]. Robotics and Autonomous Systems,2014,62(2):120-130. DOI: 10.1016/j.robot.2013.11.006
[11] 韩彦峰,李君君,肖科. 基于优化Gmapping算法的巷道喷浆机器人建图研究[J]. 湖南大学学报(自然科学版),2023,50(6):118-126. HAN Yanfeng,LI Junjun,XIAO Ke. Research on mapping of shotcrete robot in roadway based on optimized gmapping algorithm[J]. Journal of Hunan University (Natural Sciences),2023,50(6):118-126.
[12] 汪建华,黄磊,石雨婷,等. 基于优化Hector−SLAM算法的机器人自主导航系统设计[J]. 工程设计学报,2023,30(6):678-686. DOI: 10.3785/j.issn.1006-754X.2024.03.161 WANG Jianhua,HUANG Lei,SHI Yuting,et al. Design of robot autonomous navigation system based on optimized Hector-SLAM algorithm[J]. Chinese Journal of Engineering Design,2023,30(6):678-686. DOI: 10.3785/j.issn.1006-754X.2024.03.161
[13] 李芳威,鲍久圣,王陈,等. 基于LD改进Cartographer建图算法的无人驾驶无轨胶轮车井下SLAM自主导航方法及试验[J]. 煤炭学报,2024,49(增刊2):1271-1284. LI Fangwei,BAO Jiusheng,WANG Chen,et al. Unmanned trackless rubber wheeler based on LD improved Cartographer mapping algorithm underground SLAM autonomous navigation method and test[J]. Journal of China Coal Society,2024,49(S2):1271-1284.
[14] 侯可馨,李霁翔,邹腾跃,等. 基于Karto算法的割草机器人建图及其运动畸变校正[J]. 南方农机,2022,53(14):1-4. DOI: 10.3969/j.issn.1672-3872.2022.14.001 HOU Kexin,LI Jixiang,ZOU Tengyue,et al. Drawing and motion distortion correction of mowing robot based on Karto algorithm[J]. China Southern Agricultural Machinery,2022,53(14):1-4. DOI: 10.3969/j.issn.1672-3872.2022.14.001
[15] 崔邵云,鲍久圣,胡德平,等. SLAM技术及其在矿山无人驾驶领域的研究现状与发展趋势[J]. 工矿自动化,2024,50(10):38-52. CUI Shaoyun,BAO Jiusheng,HU Deping,et al. Research status and development trends of SLAM technology in autonomous mining field[J]. Journal of Mine Automation,2024,50(10):38-52.
[16] 刘燕,张健,肖庆高,等. UKF与EKF在导航定位中的对比研究[J]. 微处理机,2023,44(4):30-33. DOI: 10.3969/j.issn.1002-2279.2023.04.009 LIU Yan,ZHANG Jian,XIAO Qinggao,et al. A comparative study of UKF and EKF in navigation and positioning[J]. Microprocessors,2023,44(4):30-33. DOI: 10.3969/j.issn.1002-2279.2023.04.009
[17] 尚明姝,王克朝,高玉宝. 一种基于SURF−ORB的改进图像配准算法[J]. 计量学报,2025,46(3):323-328. DOI: 10.3969/j.issn.1000-1158.2025.03.03 SHANG Mingshu,WANG Kechao,GAO Yubao. An improved image registration algorithm based on SURF-ORB[J]. Acta Metrologica Sinica,2025,46(3):323-328. DOI: 10.3969/j.issn.1000-1158.2025.03.03
[18] 王珊,张双寒,高靖楠,等. 基于PoseNet模型实现人体姿态识别[J]. 电脑编程技巧与维护,2022(1):112-113,135. DOI: 10.3969/j.issn.1006-4052.2022.01.041 WANG Shan,ZHANG Shuanghan,GAO Jingnan,et al. Realization of human posture recognition based on PoseNet model[J]. Computer Programming Skills & Maintenance,2022(1):112-113,135. DOI: 10.3969/j.issn.1006-4052.2022.01.041
[19] 李泽龙,张小俊,王晓阳,等. 基于改进AMCL的AGV激光定位技术研究 [J/OL]. 激光杂志:1-10[2025-03-16]. http://kns.cnki.net/kcms/detail/50.1085.TN.20240926.1432.008.html. LI Zelong,ZHANG Xiaojun,WANG Xiaoyang,et al. Research on AGV laser positioning technology based on improved AMCL[J/OL]. Journal of Lasers:1-10[2025-03-16]. http://kns.cnki.net/kcms/detail/50.1085.TN.20240926.1432.008.html.
[20] 薛光辉,李瑞雪,张钲昊,等. 基于3D激光雷达的SLAM算法研究现状与发展趋势[J]. 信息与控制,2023,52(1):18-36. XUE Guanghui,LI Ruixue,ZHANG Zhenghao,et al. State-of-the-art and tendency of SLAM algorithms based on 3D LiDAR[J]. Information and Control,2023,52(1):18-36.
[21] 赵文金,朱子恒,吴云雁. 基于SLAM导航的煤矿井下机器人设计[J]. 山东煤炭科技,2024,42(2):161-165. DOI: 10.3969/j.issn.1005-2801.2024.02.035 ZHAO Wenjin,ZHU Ziheng,WU Yunyan. Design of coal mine downhole robot based on SLAM navigation[J]. Shandong Coal Science and Technology,2024,42(2):161-165. DOI: 10.3969/j.issn.1005-2801.2024.02.035
[22] 崔邵云,鲍久圣,李芳威,等. 基于多源里程融合的井下无人驾驶自主导航SLAM方法 [J/OL]. 煤炭科学技术:1-10[2025-03-13]. http://kns.cnki.net/ kcms/detail/11.2402.td.20240925.1231.002.html. CUI Shaoyun,BAO Jiusheng,LI Fangwei,et al. Autonomous navigation SLAM method for underground unmanned driving based on multi-source mileage fusion scenarios[J/OL]. Coal Science and Technology:1-10[2025-03-13]. http://kns.cnki.net/ kcms/detail/11.2402.td.20240925.1231.002.html.