
IMU-LiDAR integrated SLAM technology for unmanned driving in mines
-
摘要: 同时定位与地图构建(SLAM)是无人驾驶关键技术,现有SLAM技术在煤矿巷道环境下存在累计误差大、漂移等问题。提出一种巷道环境特征辅助的惯性测量单元(IMU)与激光雷达融合SLAM算法。利用IMU观测数据预测点云运动状态并进行运动补偿,减少由设备运动引起的点云畸变;通过点云配准得到雷达里程计位姿变换信息,构成雷达里程计约束;提取巷道侧壁和地面点云并进行平面拟合,构成环境约束;基于IMU预积分约束、雷达里程计约束和环境约束,采用因子图优化方法完成激光雷达与IMU紧耦合,实现对巷道三维场景的高精度重建和无人驾驶车辆定位。仿真实验表明,巷道环境特征辅助的IMU与激光雷达融合SLAM算法的绝对轨迹均方根误差为0.116 2 m,相对轨迹均方根误差为0.040 9 m,定位精度较常用的LeGO−LOAM算法和LIO−SAM算法有所提升。真实环境测试结果表明,该算法具有良好的建图效果,未出现漂移和拖尾现象,具有较强的环境适应性和鲁棒性。Abstract: Simultaneous localization and mapping (SLAM) is a critical technology for unmanned driving. Existing SLAM methods have the drawbacks of significant cumulative errors and drift in coal mine roadway environment. In this study, a roadway environment feature-assisted SLAM algorithm integrating inertial measurement unit (IMU) and LiDAR was proposed. IMU observation data was used to predict the motion state of point cloud and motion compensation was applied to reduce point cloud distortion caused by equipment movement. Pose transformation information from LiDAR odometry was obtained through point cloud registration, forming a LiDAR odometry constraint. Point clouds from roadway sidewalls and floor were extracted and fitted to planes, establishing environmental constraints. Using IMU pre-integration constraints, LiDAR odometry constraints, and environmental constraints, the algorithm applied factor graph optimization to achieve tight coupling between LiDAR and IMU, enabling high-precision 3D reconstruction of roadway scenes and accurate localization of autonomous vehicles. Simulation experiments showed that the absolute trajectory root mean square error (RMSE) of the roadway environment feature-assisted IMU-LiDAR integrated SLAM algorithm was 0.1162 m, and the relative trajectory RMSE was 0.0409 m, improving positioning accuracy compared to commonly used algorithms such as LeGO-LOAM and LIO-SAM. Based on the test results in a real environment, the algorithm provides excellent mapping performance with no drift or trailing, demonstrating strong environmental adaptability and robustness.
-
-
![]()
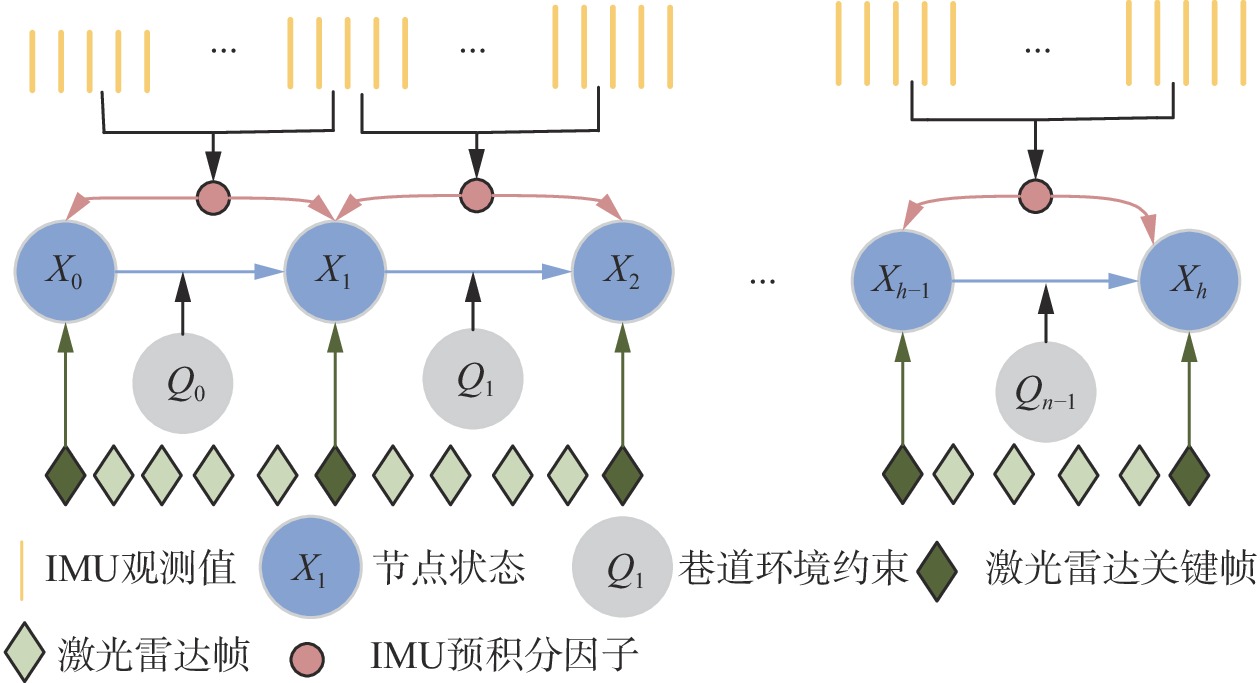
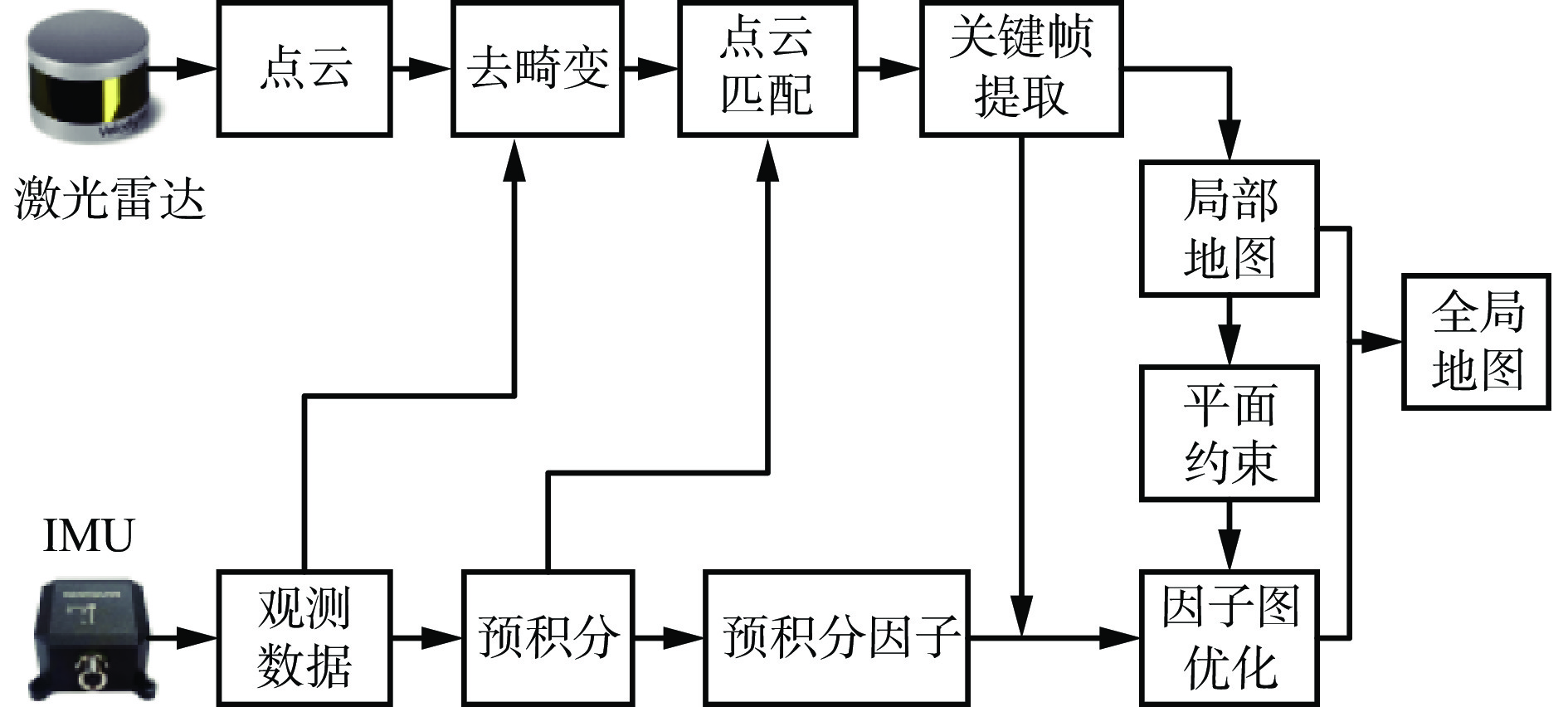
图 1 IMU与激光雷达融合SLAM算法框架
Figure 1. Framework of simultaneous localization and mapping(SLAM) algorithm integrating inertial measurement unit(IMU) and LiDAR
![]()
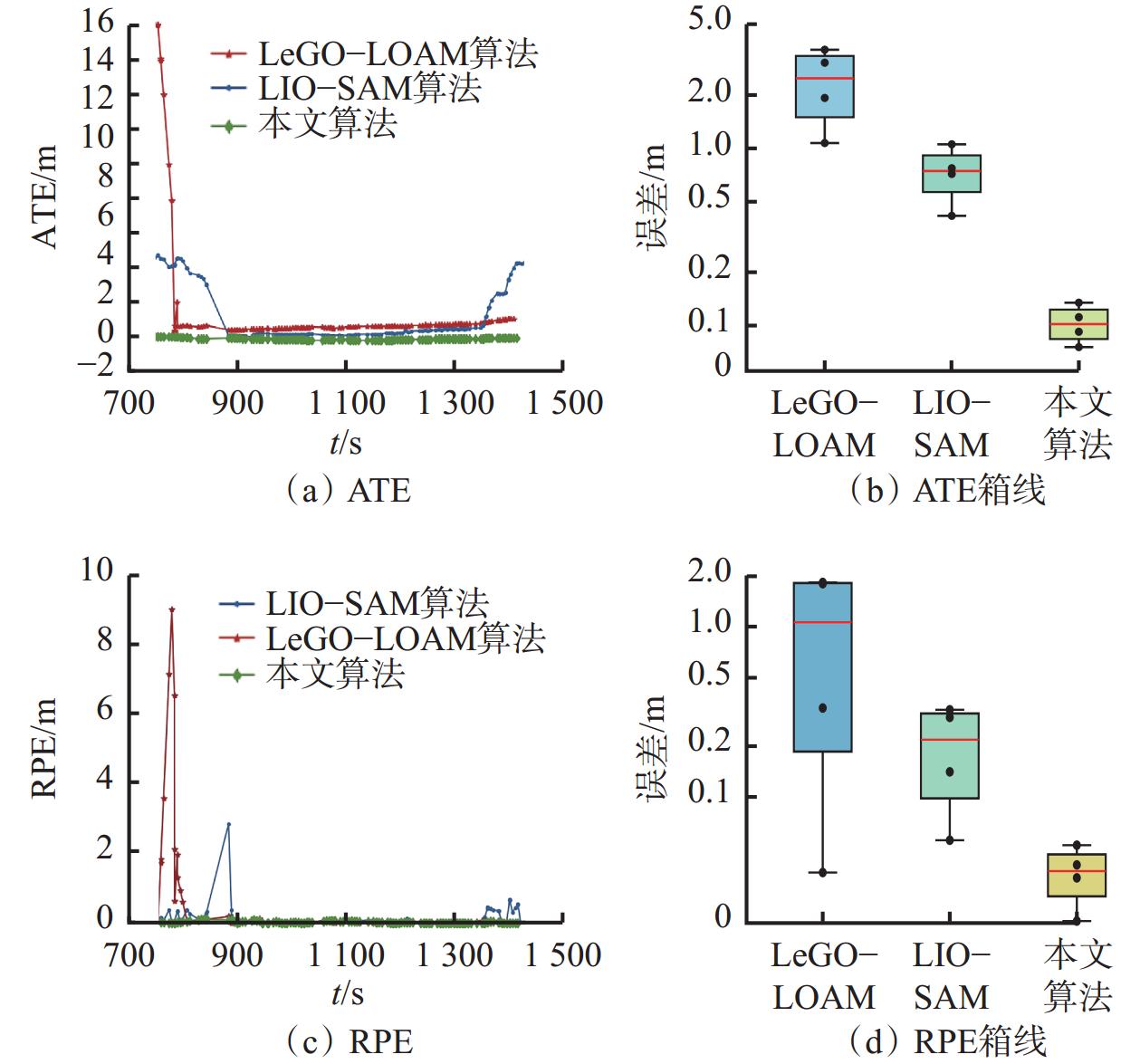
图 8 3种算法规划的二维轨迹对比
Figure 8. Comparisons of 2D trajectories planned by three algorithms
![]()
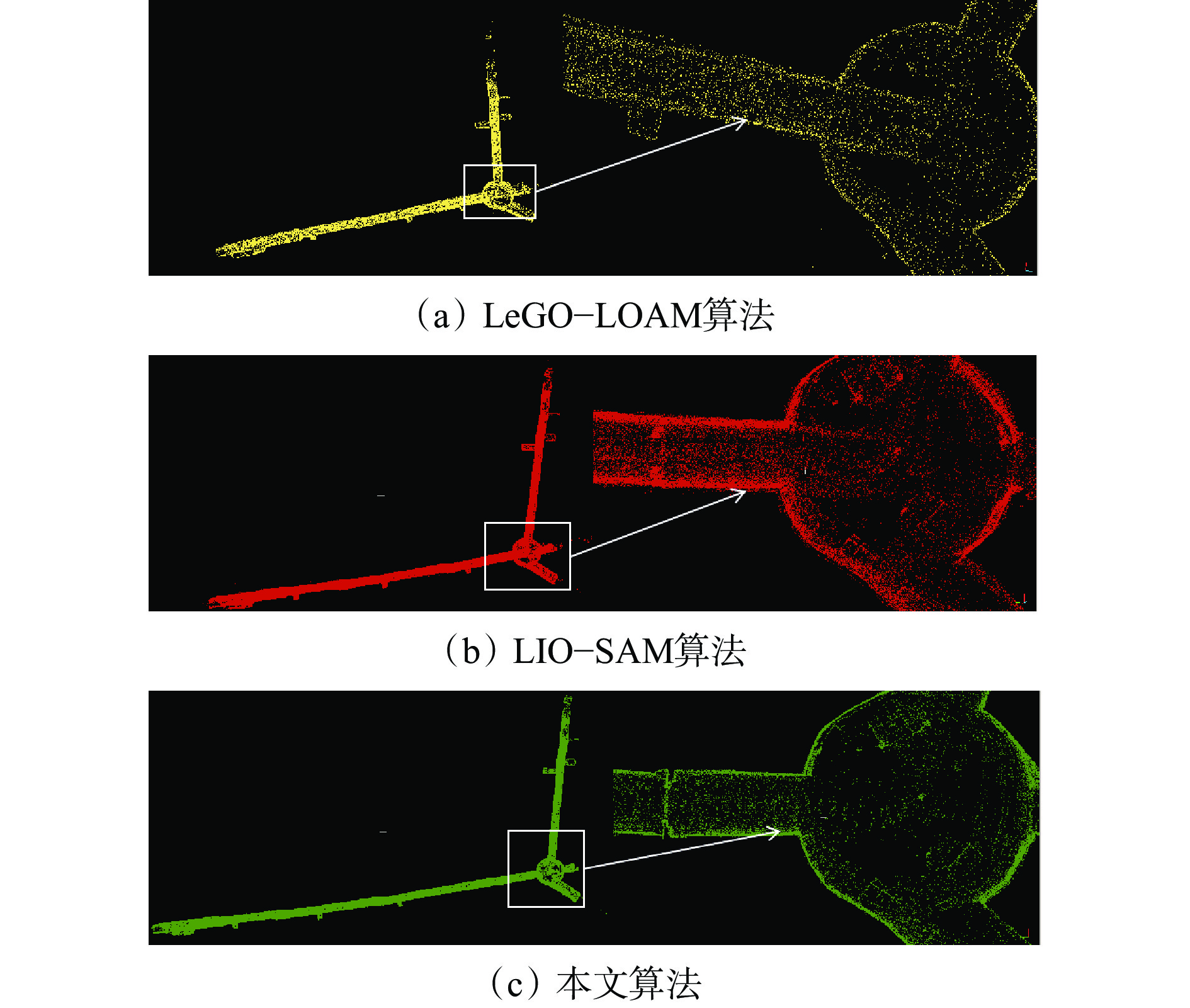
图 12 3种算法在巷道环境中的建图效果
Figure 12. Mapping results of three algorithm in readway environment
![]()
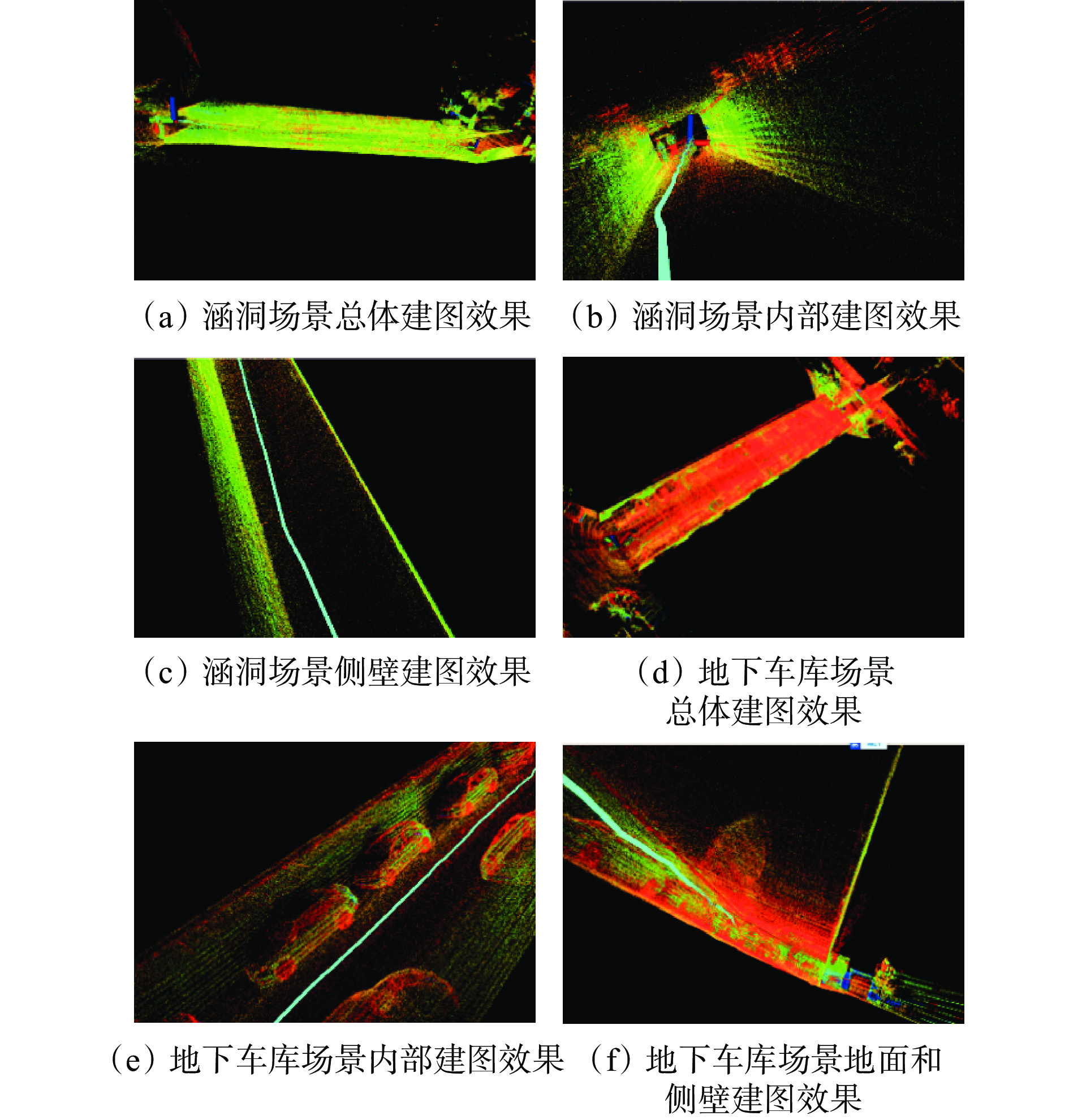
图 14 涵洞和地下车库场景中建图效果
Figure 14. Mapping effect in culvert and underground garage scenarios
表 1 3种算法的绝对轨迹误差
Table 1 Absolute trajectory error (ATE) of three algorithms
m 指标 LeGO−LOAMS算法 LIO−SAM算法 本文算法 均方根误差 3.2237 1.9166 0.1162 平均值 1.4160 1.2771 0.1053 中值 0.7579 0.5030 0.1052 标准差 2.8961 1.4291 0.0495  下载: 导出CSV
下载: 导出CSV
表 2 3种算法的相对轨迹误差
Table 2 Relative pose error (RPE) of three algorithms
m 指标 LeGO−LOAM算法 LIO−SAM算法 本文算法 均方根误差 1.4924 0.3303 0.0409 平均值 0.3627 0.1236 0.0298 中值 1.0193 0.2061 0.0254 标准差 1.4476 0.3063 0.0283
下载: 导出CSV
-
[1] 胡青松,孟春蕾,李世银,等. 矿井无人驾驶环境感知技术研究现状及展望[J]. 工矿自动化,2023,49(6):128-140. HU Qingsong,MENG Chunlei,LI Shiyin,et al. Research status and prospects of perception technology for unmanned mining vehicle driving environment[J]. Journal of Mine Automation,2023,49(6):128-140.
[2] 陈善有,郭洋,田斌,等. 国内外露天矿山无人驾驶研究现状分析与发展前景[J]. 现代矿业,2023,39(12):12-16. CHEN Shanyou,GUO Yang,TIAN Bin,et al. Analysis of current research status and development prospects of unmanned driving in open-pit mines at home and abroad[J]. Modern Mining,2023,39(12):12-16.
[3] 危双丰,庞帆,刘振彬,等. 基于激光雷达的同时定位与地图构建方法综述[J]. 计算机应用研究,2020,37(2):327-332. WEI Shuangfeng,PANG Fan,LIU Zhenbin,et al. Survey of LiDAR-based SLAM algorithm[J]. Application Research of Computers,2020,37(2):327-332.
[4] 张新,徐建华,陈彤,等. 面向重大自然灾害的救援装备研究现状及发展趋势[J]. 科学技术与工程,2021,21(25):10552-10565. DOI: 10.3969/j.issn.1671-1815.2021.25.002 ZHANG Xin,XU Jianhua,CHEN Tong,et al. Research status and development trend of rescue equipment for major natural disasters[J]. Science Technology and Engineering,2021,21(25):10552-10565. DOI: 10.3969/j.issn.1671-1815.2021.25.002
[5] 蒋济州,徐文福,潘尔振. 仿生扑翼飞行机器人自主导航系统研究进展[J]. 仪器仪表学报,2023,44(11):66-84. JIANG Jizhou,XU Wenfu,PAN Erzhen. Survey on autonomous navigation systems of bionic flapping-wing flying robot[J]. Chinese Journal of Scientific Instrument,2023,44(11):66-84.
[6] 周治国,曹江微,邸顺帆. 3D激光雷达SLAM算法综述[J]. 仪器仪表学报,2021,42(9):13-27. ZHOU Zhiguo,CAO Jiangwei,DI Shunfan. Overview of 3D lidar SLAM algorithms[J]. Chinese Journal of Scientific Instrument,2021,42(9):13-27.
[7] 聂明炎,杨诚. 一种LiDAR平面配准方法辅助的IMU室内定位算法[J]. 测绘地理信息,2021,46(5):27-30. NIE Mingyan,YANG Cheng. An IMU indoor location algorithm assisted by LiDAR plane registration method[J]. Journal of Geomatics,2021,46(5):27-30.
[8] ZHANG Ji,SINGH S. Low-drift and real-time lidar odometry and mapping[J]. Autonomous Robots,2017,41:401-416 . DOI: 10.1007/s10514-016-9548-2
[9] TANG Jian,CHEN Yuwei,NIU Xiaoji,et al. LiDAR scan matching aided inertial navigation system in GNSS-denied environments[J]. Sensors,2015,15(7):16710-16728. DOI: 10.3390/s150716710
[10] FRANK S A B D G. Tight coupling of laser scanner and inertial measurements for a fully autonomous relative navigation solution[J]. Navigation,2007,54(3):189-205. DOI: 10.1002/j.2161-4296.2007.tb00404.x
[11] 马艾强,姚顽强,蔺小虎,等. 面向煤矿巷道环境的LiDAR与IMU融合定位与建图方法[J]. 工矿自动化,2022,48(12):49-56. MA Aiqiang,YAO Wanqiang,LIN Xiaohu,et al. Coal mine roadway environment-oriented LiDAR and IMU fusion positioning and mapping method[J]. Journal of Mine Automation,2022,48(12):49-56.
[12] 李猛钢,胡而已,朱华. 煤矿移动机器人LiDAR/IMU紧耦合SLAM方法[J]. 工矿自动化,2022,48(12):68-78. LI Menggang,HU Eryi,ZHU Hua. LiDAR/IMU tightly-coupled SLAM method for coal mine mobile robot[J]. Journal of Mine Automation,2022,48(12):68-78.
[13] 杨林,马宏伟,王岩. 基于激光惯性融合的煤矿井下移动机器人SLAM算法[J]. 煤炭学报,2022,47(9):3523-3534. YANG Lin,MA Hongwei,WANG Yan. LiDAR-inertial SLAM for mobile robot in underground coal mine[J]. Journal of China Coal Society,2022,47(9):3523-3534.
[14] GENTIL C L,VIDAL-CALLEJA T,HUANG S. IN2LAMA:inertial lidar localisation and mapping[C]. International Conference on Robotics and Automation,Montreal,2019:6388-6394.
[15] SHAN Tixiao,ENGLOT B,MEYERS D,et al. LIO-SAM:tightly-coupled lidar inertial odometry via smoothing and map[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems,Las Vegas,2020:5135-5142.
[16] RANGANATHAN A. The levenberg-marquardt algorithm[J]. Tutoral on LM Algorithm,2004,11(1):101-110.
[17] DERPANIS K G. Overview of the RANSAC algorithm[J]. Image Rochester NY,2010,4(1):2-3.
[18] LENG Zhixin,LI Shu,LI Xin,et al. An improved fast ground segmentation algorithm for 3D point cloud[C]. Chinese Control and Decision Conference,Hefei,2020:5016-5020.
[19] SHAN Tixiao,ENGLOT B. LeGO-LOAM:lightweight and ground-optimized lidar odometry and mapping on variable terrain[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems,Madrid,2018. DOI: 10.1109/IROS.2018.8594299.
[20] 秦学斌,王炳,景宁波,等. 基于矿区巷道巡检机器人的LOAM-SLAM地图重建改进算法的研究[J]. 金属矿山,2022(4):163-168. QIN Xuebin,WANG Bing,JIN Ningbo,et al. Research on improved algorithm of LOAM-SLAM map reconstruction based on mine roadway inspection robot[J]. Metal Mine,2022(4):163-168.
-
期刊类型引用(8)
1. 张朋. 低水压掏穴扩孔技术在卸压增透钻孔中的应用. 煤矿机械. 2024(01): 142-145 .  百度学术
百度学术
2. 田东庄,杨文佳,田宏杰. 低透气煤层无泵式钻扩一体化增透技术与钻具研究. 中国煤炭. 2024(05): 73-76 . 百度学术
3. 梅安平. 基于节流压降原理的煤层段水力造穴钻头研究. 煤矿安全. 2024(10): 207-213 . 百度学术
4. 牟全斌. 我国煤层造穴增渗技术研究现状与进展. 煤矿机械. 2023(02): 65-68 . 百度学术
5. 毕猛,董群,周建伟,高保彬,刘彦伟,史进. 瓦斯抽采孔离心式机械造穴增透机制及装备研发. 煤矿安全. 2023(10): 189-195 . 百度学术
6. 高晓亮,邵国杰,杨虎伟. 中硬煤层瓦斯穿层钻孔无泵式双通道机械掏穴钻头设计与应用. 煤田地质与勘探. 2022(10): 159-164 . 百度学术
7. 宋建民,邹永洺. 机械造穴增透技术在高瓦斯低透气性煤层的应用研究. 山西煤炭. 2022(04): 25-32 . 百度学术
8. 杨哲,栗子剑,李鹏. 桑树坪二号井矿预掘巷道顶板梳状定向钻孔关键技术. 煤矿安全. 2020(08): 96-99 . 百度学术
其他类型引用(1)





计量
- 文章访问数: 1861
- HTML全文浏览量: 69
- PDF下载量: 83
- 被引次数: 9
