
Current research status and development trends of deep well rescue technology and equipment
-
摘要: 深井救援技术是指在深井事故救援过程中对被困人员进行救援各环节涉及的关键技术,主要包括环境侦测技术、生命探测技术、深井快速破拆技术、应急通信网络构建技术及保障深井事故救援顺利进行的其他辅助技术。深井救援装备是指在深井救援技术实施过程中必要的硬件装备和软件平台等。研究深井救援技术和装备对于保障被困人员生命安全、减少事故损失至关重要。分析了深井救援装备及关键技术的研究现状,指出现有的救援技术和装备并不能完全满足复杂多变的环境要求,存在救援装备的通用性与专用性研究不足、救援装备智能化程度有待提升、网络协同能力难以满足救援复杂环境要求、救援装备创新性研究不足等问题。针对上述问题,展望了深井救援装备与技术的发展趋势:① 深井救援装备应通过不同救援场景进行专用性和通用性划分,单一装备向多功能性、高可靠性、高机动性发展。② 救援装备智能化、精准化、自主决策化,实现智能装备为主、人员为辅的救援模式。③ 构建急速组网、多模式组网、一体化救援网络平台。④ 集成TDLAS虽然目前并没有达到救援标准,但其高分辨率、高灵敏度和可集成化在未来将会发挥重要作用,以实现环境监测装备的高集成、轻量化、高效化。Abstract: Deep well rescue technology refers to the key technologies involved in various aspects of rescuing trapped personnel during the process of deep well accident rescue. It mainly includes environmental detection technology, life detection technology, deep well rapid demolition technology, emergency communication network construction technology, and other auxiliary technologies to ensure the smooth progress of deep well accident rescue. Deep well rescue equipment refers to necessary hardware equipment and software platforms during the implementation of deep well rescue technology. Studying deep well rescue technology and equipment is crucial for ensuring the safety of trapped personnel and reducing accident losses. The current research status of deep well rescue equipment and key technologies is analyzed. It is pointed out that existing rescue technologies and equipment cannot fully meet the complex and changing environmental requirements. There are problems such as insufficient research on the universality and specificity of rescue equipment, the need to improve the intelligence level of rescue equipment, difficulty in meeting the needs of complex rescue environments with network collaboration capabilities, and insufficient innovation research on rescue equipment. In order to solve the above issues, the development trend of deep well rescue equipment and technology is discussed. ① Deep well rescue equipment should be divided into specialized and universal categories based on different rescue scenarios. A single equipment should develop towards multifunctionality, high reliability, and high mobility. ② Rescue equipment is intelligent, precise, and self decision-making, achieving a rescue mode of intelligent equipment as the main focus and personnel as the auxiliary. ③ It is suggested to build a rapid networking, multi-mode networking, and integrated rescue network platform. ④ Although TDLAS integration does not currently meet rescue standards, its high resolution, high sensitivity, and integrability will play an important role in the future, achieving high integration, lightweight, and efficiency of environmental monitoring equipment.
-
-
![]()
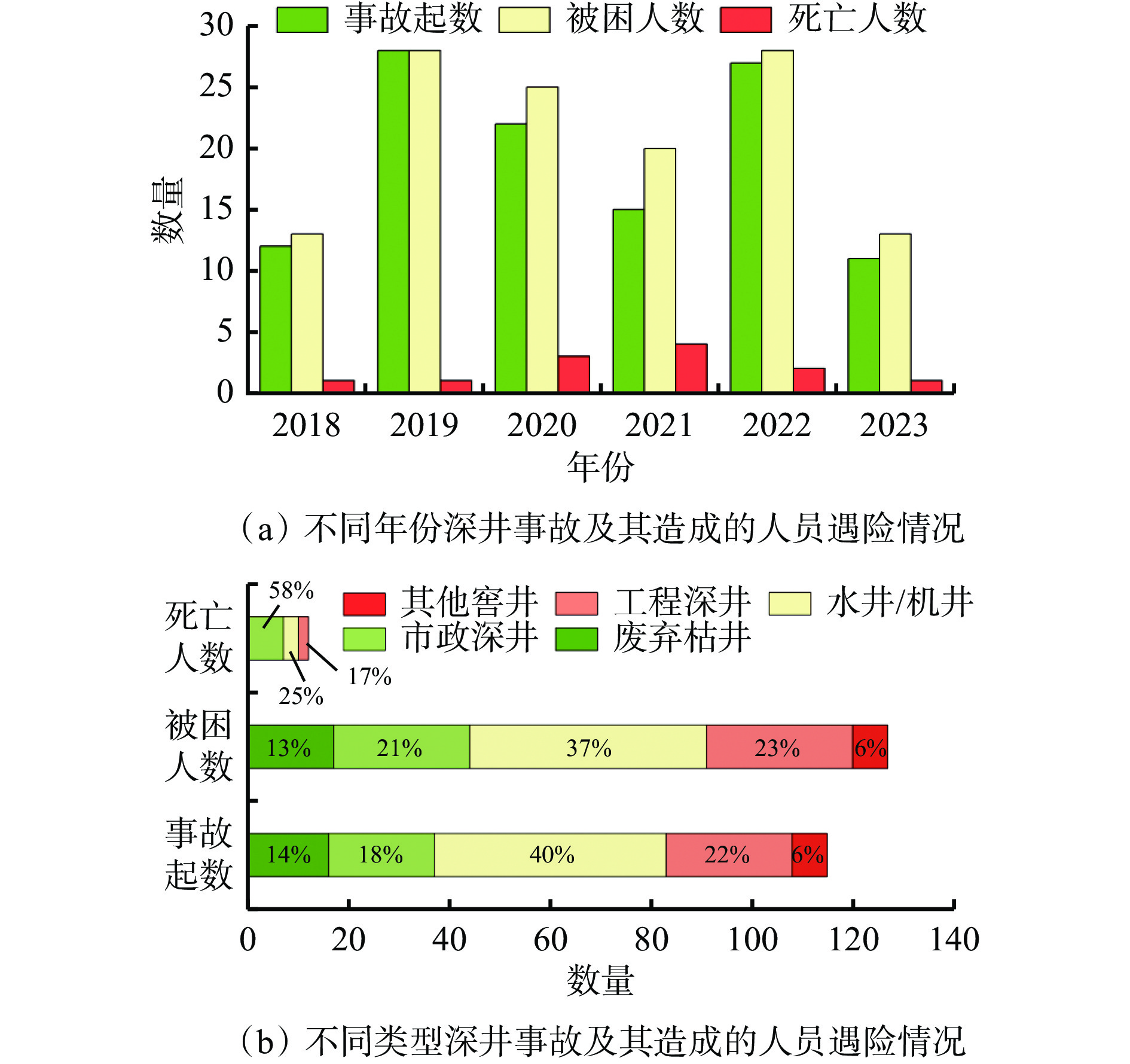
图 1 2018−2023年全国深井困人事故情况
Figure 1. Deep well trapped personnel accidents in China from 2018 to 2023
![]()
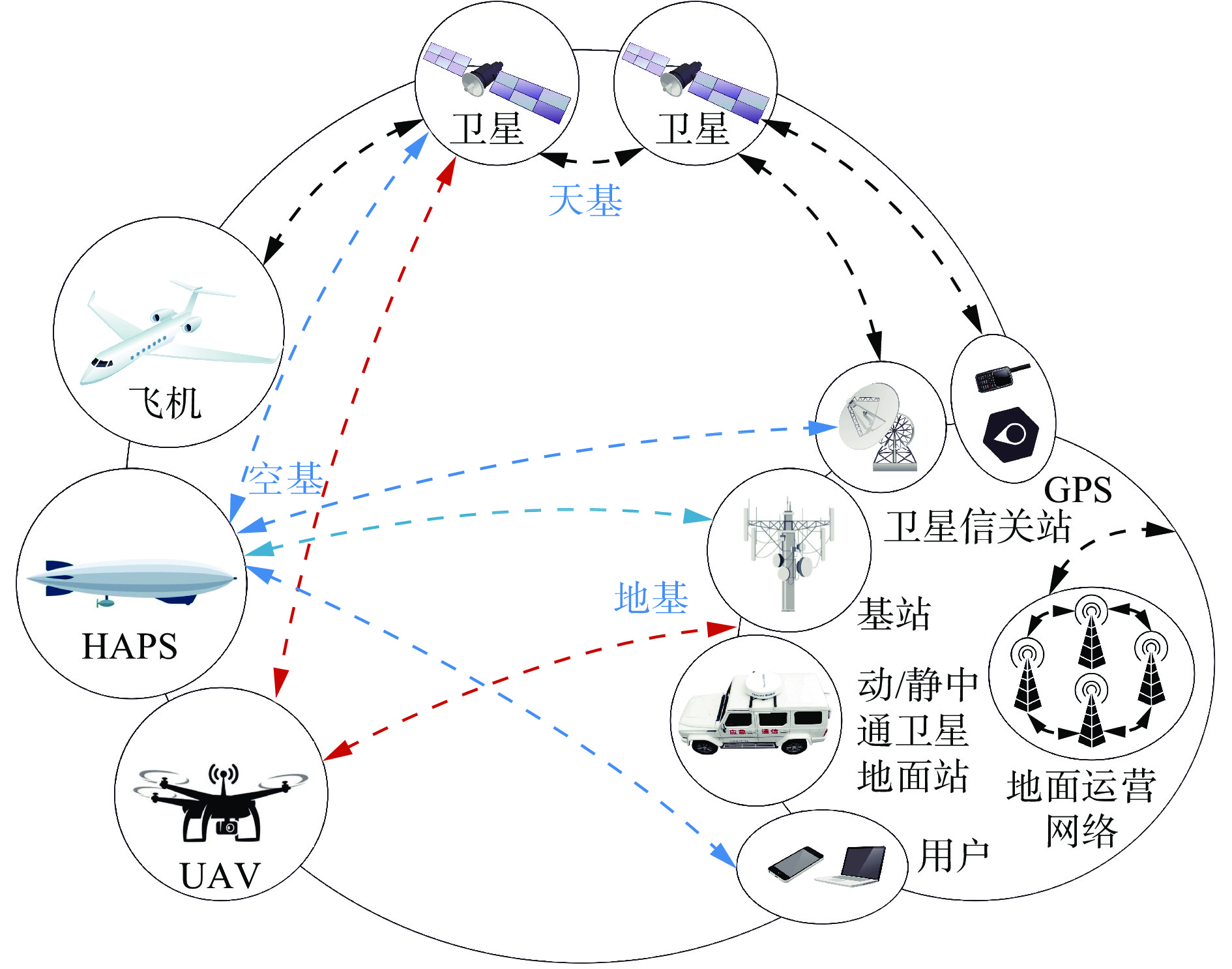
图 8 空天地一体化应急通信装备体系
Figure 8. Emergency communication equipment system with integrated of air and earth
表 1 典型气体检测仪检测性能对比
Table 1 Comparison of typical gas detectors performance
传感器 测量
种类同时测量
气体数量通信
方式适用
环境/℃分辨率/
10−6MultiRAE2 1~30 6 无线通信 −20~50 0.1~1 Honeywell BW Flex4 1~15 4 蓝牙 −40~60 1 Honeywell BW Ultra 1~15 5 蓝牙 −20~50 1 MicroRAE 4 4 无线通信 −40~50 1 GasAlertMax XT II 4 4 无 −20~50 1  下载: 导出CSV
下载: 导出CSV
-
[1] 周裕凡. 面向深井搜救的悬挂机械臂系统设计[D]. 广州:广东工业大学,2021. ZHOU Yufan. Design of suspension manipulator system for deep well search and rescue[D]. Guangzhou:Guangdong University of Technology,2021.
[2] GHAREEB G. Investigation of the potentials and constrains of employing robots in construction in Egypt[J]. Egypts Presidential Specialized Council for Education and Scientific Research,2021(1). DOI: 10.21608/EIJEST.2021.79422.1069.
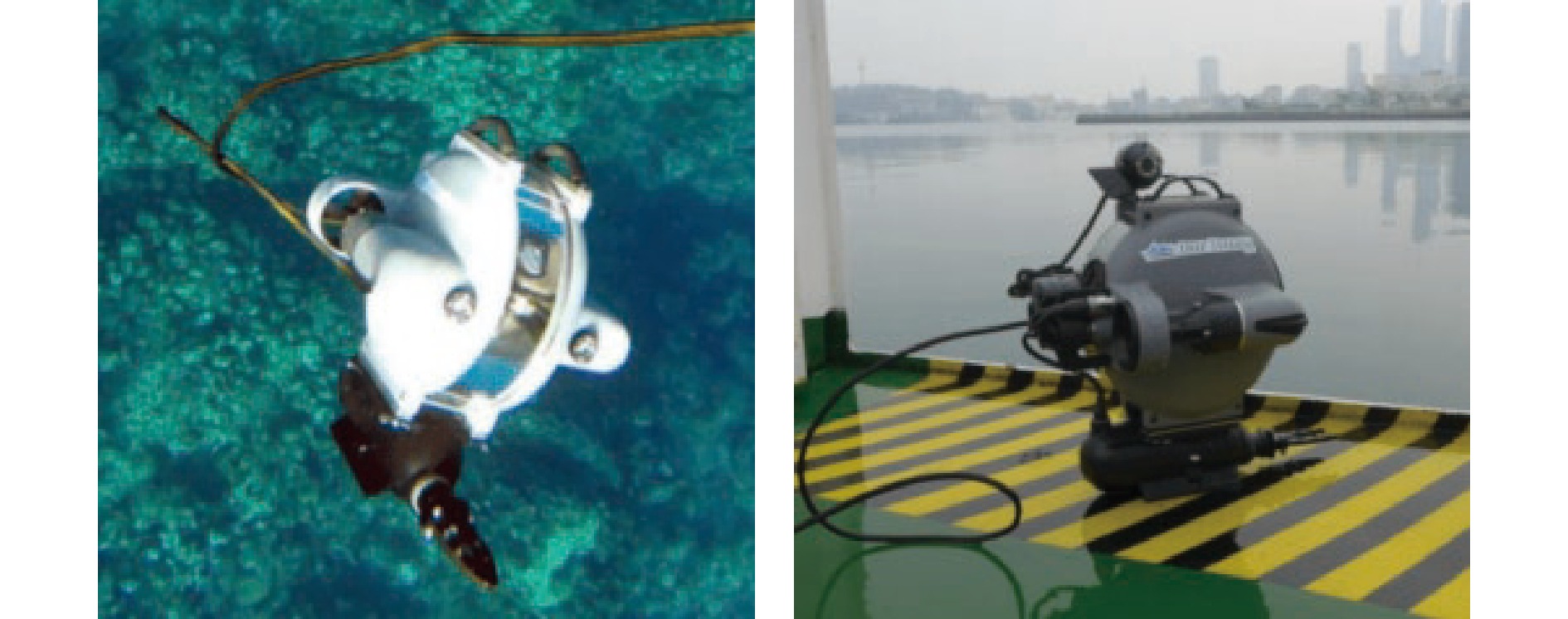
[3] 刘泽发. 观测型ROV航行控制系统设计及运动控制技术研究[D]. 杭州:浙江大学,2015. LIU Zefa. Development of navigation control system and research on the motion control technique of observation-class ROV[D]. Hangzhou:Zhejiang University,2015.
[4] 吴园涛,任小波,段晓男,等. 构建自立自强的海洋科学观测探测技术体系的思考[J]. 中国科学院院刊,2022,37(7):861-869. WU Yuantao,REN Xiaobo,DUAN Xiaonan,et al. Thoughts on constructing self-reliance and self-strengthening marine scientific observation and detection technology system[J]. Bulletin of Chinese Academy of Sciences,2022,37(7):861-869.
[5] LIANG Yuntao,ZHANG Jian,WANG Liancong,et al. Forecasting spontaneous combustion of coal in underground coal mines by index gases:a review[J]. Journal of Loss Prevention in the Process Industries,2019,57:208-222. DOI: 10.1016/j.jlp.2018.12.003
[6] 聂珲,陈海峰. 基于NB−IoT环境监测的多传感器数据融合技术[J]. 传感技术学报,2020,33(1):144-152. NIE Hui,CHEN Haifeng. Multi-sensor data fusion technology based on NB-IoT environment monitoring[J]. Chinese Journal of Sensors and Actuators,2020,33(1):144-152.
[7] 戴海发,卞鸿巍,王荣颖,等. 一种改进的多传感器数据自适应融合方法[J]. 武汉大学学报(信息科学版),2020,45(10):1602-1609. DAI Haifa,BIAN Hongwei,WANG Rongying,et al. An improved multi-sensor data adaptive fusion method[J]. Geomatics and Information Science of Wuhan University,2020,45(10):1602-1609.
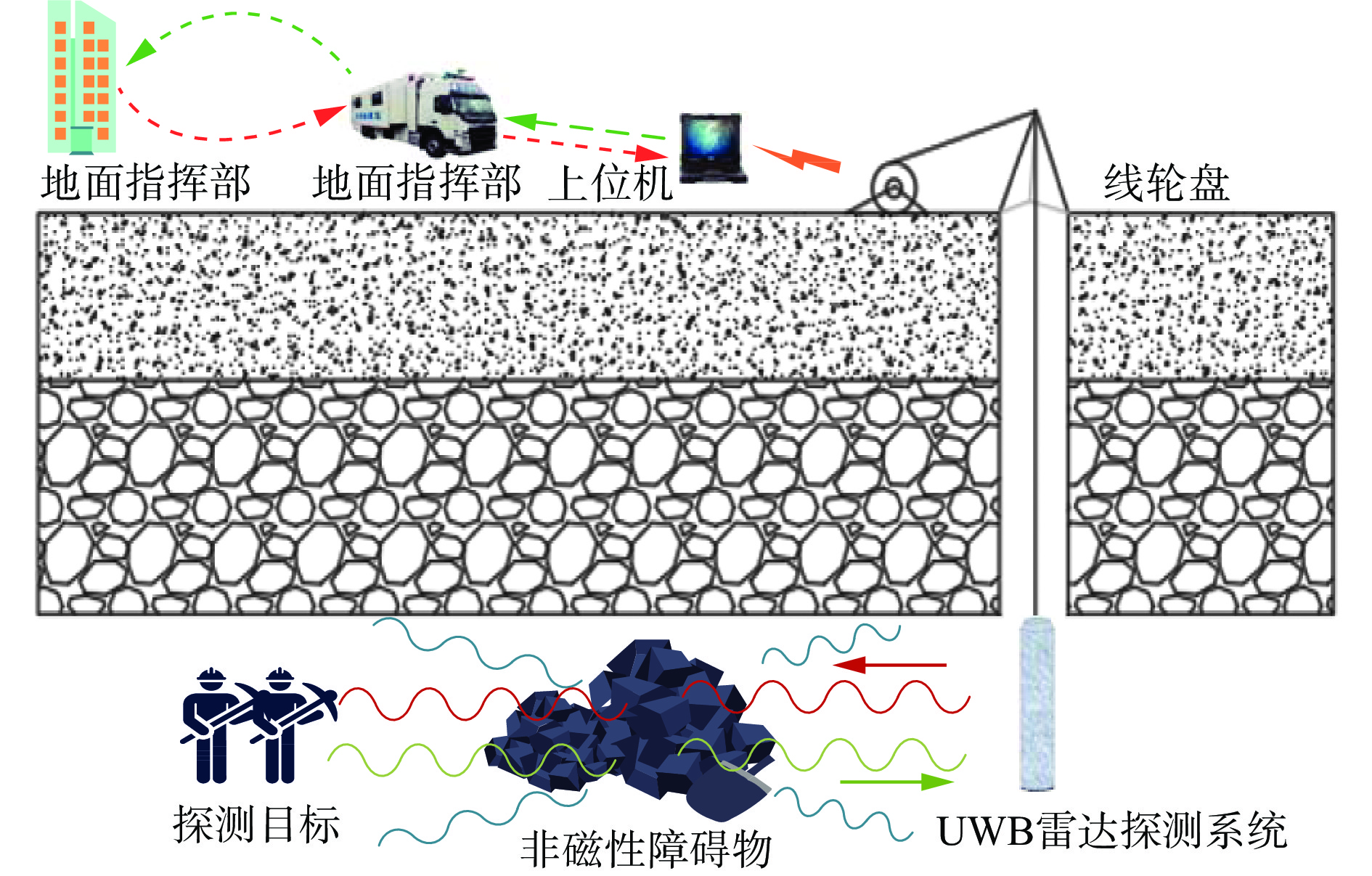
[8] 张铎. 超宽带雷达波在煤中传播规律与定位基础研究[D]. 西安:西安科技大学,2018. ZHANG Duo. Fundamental research on propagation law of ultra-wideband radar wave in coal and localiztion[D]. Xi'an:Xi'an University of Science and Technology,2018.
[9] 文虎,周博,郑学召,等. UWB雷达在矿山钻孔救援中的应用研究[J]. 工矿自动化,2023,49(6):88-94. WEN Hu,ZHOU Bo,ZHENG Xuezhao,et al. Research on the application of UWB radar in mine drilling rescue[J]. Journal of Mine Automation,2023,49(6):88-94.
[10] 郑学召,王虎,文虎,等. 矿井钻孔救援通信技术的研究进展及趋势[J]. 工矿自动化,2017,43(9):41-45. ZHENG Xuezhao,WANG Hu,WEN Hu,et al. Research progress and tendency of mine drilling rescue communication technology[J]. Industry and Mine Automation,2017,43(9):41-45.
[11] 郑学召,孙梓峪,郭军,等. 矿山钻孔救援多源信息探测技术研究与应用[J]. 煤田地质与勘探,2022,50(11):94-102. ZHENG Xuezhao,SUN Ziyu,GUO Jun,et al. Research and application of multi-source information detection technology for drilling rescue of mine[J]. Coal Geology & Exploration,2022,50(11):94-102.
[12] 詹秋磊. 主动式矿用生命探测仪的研究与设计[D]. 重庆:重庆大学,2014. ZHAN Qiulei. Exploration and design of active life detection instrument for coal mine[D]. Chongqing :Chongqing University,2014.
[13] PAWEL Z,ADAM W,PAWEL T. Detection of a predefined acoustic pattern by a measurement system on a drone and its application to search for a missing man in an underground mine[C]. IOP Conference Series:Earth and Environmental Science,Wroclaw,2021. DOI: 10.1088/1755-1315/942/1/012018.
[14] JIAO Mingke,LU Guohua,JING Xijing. A novel radar sensor for the non-contact detection of speech signals[J]. Sensors. 2010,10(5):4622-4633.
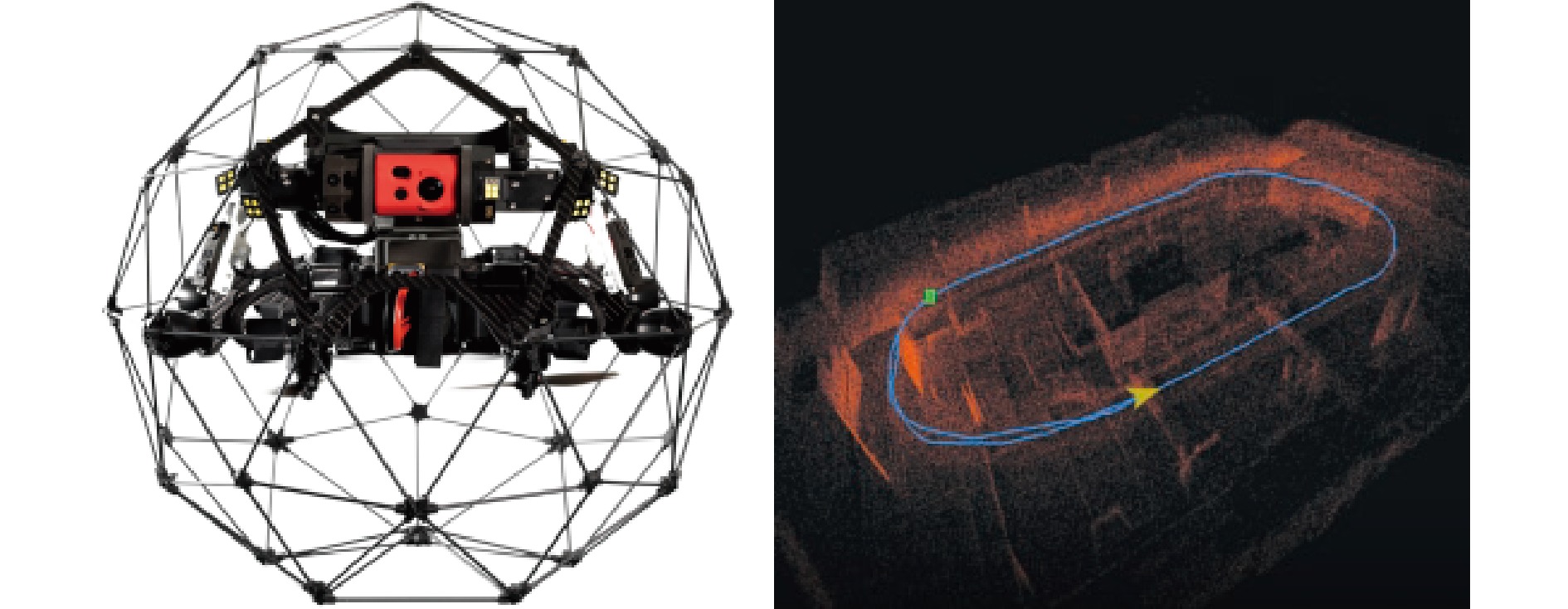
[15] 郑学召,童鑫,张铎,等. 矿井危险区域多旋翼侦测无人机关键技术探讨[J]. 工矿自动化,2020,46(12):48-56. ZHEGN Xuezhao,TONG Xin,ZHANG Duo,et al. Discussion on key technologies of multi-rotor detection UAVs in mine dangerous area[J]. Industry and Mine Automation,2020,46(12):48-56.
[16] 张铎,吴佩利,郑学召,等. 矿井侦测无人机研究现状与发展趋势[J]. 工矿自动化,2020,46(7):76-81. ZHAGN Duo,WU Peili,ZHENG Xuezhao,et al. Research status and development trend of mine detection unmanned aerial vehicle[J]. Industry and Mine Automation,2020,46(7):76-81.
[17] 沈凡凡,杨博帆,梁琦玮,等. 基于深度强化学习的无人机矿井自主巡航研究[J]. 武汉大学学报(理学版),2023,69(2):205-214. SHEN Fanfan,YANG Bofan,LIANG Qiwei,et al. Research on autonomous mine cruise of UAV based on deep reinforcement learning[J]. Journal of Wuhan University(Natural Science Edition),2023,69(2):205-214.
[18] 夏双双. 煤矿井下微小型无人机航迹规划和定位算法研究[D]. 青岛:山东科技大学,2018. XIA Shuangshuang. Research on path planning and location algorithm for microminiature UAV in coal mine[D]. Qingdao:Shandong University of Science and Technology,2018.
[19] 郑伟,徐放,张雅楠,等. 激光切割技术在消防救援破拆中的应用研究[J]. 消防科学与技术,2023,42(1):89-93. DOI: 10.3969/j.issn.1009-0029.2023.01.020 ZHENG Wei,XU Fang,ZHANG Yanan et al. Research on the application of laser cutting technology in fire rescue demolition[J]. Fire Science and Technology,2023,42(1):89-93. DOI: 10.3969/j.issn.1009-0029.2023.01.020
[20] FEKETE S,DIEDERICHS M,LATO M. Geotechnical and operational applications for 3-dimensional laser scanning in drill and blast tunnels[J]. Tunnelling and Underground Space Technology,2010,25(5):614-628. DOI: 10.1016/j.tust.2010.04.008
[21] 肖玉林. 一种救援机器人收纳系统的结构设计与分析[D]. 天津:天津理工大学,2015. XIAO Yulin. The structure design and analysis of the rescue device of the rescue robot[D]. Tianjin:Tianjin University of Technology,2015.
[22] DERLUKIEWICZ D ,PTAK M ,WILHELM J ,et al. The numerical-experimental studies of demolition machine operator work[C]. 13th International Scientific Conference,Wrocław,2016:129-138.
[23] HAGA M,HIROSHI W,FUJISHIMA K. Digging control system for hydraulic excavator[J]. Mechatronics:The Science of Intelligent Machines,2001,11(6):665-676.
[24] 刘金国,王越超,李斌,等. 灾难救援机器人研究现状、关键性能及展望[J]. 机械工程学报,2006,42(12):1-12. DOI: 10.3321/j.issn:0577-6686.2006.12.001 LIU Jinguo,WANG Yuechao,LI Bin,et al. Current research,key performances and future development of search and rescue robot[J]. Chinese Journal of Mechanical Engineering,2006,42(12):1-12. DOI: 10.3321/j.issn:0577-6686.2006.12.001
[25] 李贺武,吴茜,徐恪,等. 天地一体化网络研究进展与趋势[J]. 科技导报,2016,34(14):95-106. LI Hewu,WU Qian,XU Ke,et al. Progress and tendency of space and earth integrated network[J]. Science & Technology Review,2016,34(14):95-106.
[26] 刘志博,邓中亮. 基于MINA的定位终端通信设计与实现[J]. 软件,2017,38(1):1-5. LIU Zhibo,DENG Zhongliang. Design and implementation of location terminal communication based on MINA[J]. Computer Engineering & Software,2017,38(1):1-5.
[27] 姜铁增. 基于LTE信号的灾后环境下的信道建模与定位算法研究[D]. 北京:北京邮电大学,2019. JIANG Tiezeng. Research of LTE-signal-based channel modeling and positioning algorithm in post-disaster environment[D]. Beijing:Beijing University of Posts and Telecommunications,2019.
[28] TAKAHATA K,TAKADA S,SHIBATA Y. Disaster communication network by combination of different wireless lans[C]. 22nd International Conference on Advanced Information Networking and Applications-Workshops,Ginowan,2008:1129-1133.
[29] 周彦果. 5G移动通信的若干关键技术研究[D]. 西安:西安电子科技大学,2018. ZHOU Yanguo. Research on several key technologies for 5G mobile communication[D]. Xi'an:Xidian University,2018.
[30] 丁昌鹏,张屹,张虎,等. 深井救援机械手的机构设计[J]. 三峡大学学报(自然科学版),2011,33(2):79-84. DING Changpeng,ZHANG Yi,ZHANG Hu,et al. Mechanism design of deep well rescue manipulator[J]. Journal of Three Gorges University (Natural Science),2011,33(2):79-84.
[31] 李超. 基于柔性臂的小口径深井救援机器人研制[D]. 哈尔滨:哈尔滨工业大学,2020. LI Chao. Development of small diameter deep well rescue robot based on flexible arms[D]. Harbin:Harbin Institute of Technology,2020.
[32] 张靖,宋家驹,宋志彬,等. 小口径深井救援技术探讨[J]. 消防技术与产品信息,2015(11):34-37. ZHANG Jing,SONG Jiaju,SONG Zhibin,et al. Discussion on rescue technology of small diameter deep well[J]. Fire Technique and Products Information,2015(11):34-37.
[33] 别远辉,梁启文. 新型狭窄井口深井救援设备研发[J]. 消防技术与产品信息,2018,31(8):87-90. DOI: 10.3969/j.issn.1002-784X.2018.08.024 BIE Yuanhui,LIANG Qiwen. Research and development of new deep well rescue equipment for narrow wellhead[J]. Fire Technique and Products Information,2018,31(8):87-90. DOI: 10.3969/j.issn.1002-784X.2018.08.024
[34] 裴锴,陈建强,黄子鹏. 智能纵深救援装备的研发与应用[J]. 消防科学与技术,2016,35(10):1467-1469. DOI: 10.3969/j.issn.1009-0029.2016.10.034 PEI Kai,CHEN Jianqiang,HUANG Zipeng. The development and application of intelligent deep rescue equipment[J]. Fire Science and Technology,2016,35(10):1467-1469. DOI: 10.3969/j.issn.1009-0029.2016.10.034
[35] 赵京,张自强,郑强,等. 机器人安全性研究现状及发展趋势[J]. 北京航空航天大学学报,2018,44(7):1347-1358. DOI: 10.13700/j.bh.1001-5965.2017.0568 ZHAO Jing,ZHANG Ziqiang,ZHENG Qiang,et al. Research status and development trend of robot safety[J]. Journal of Beijing University of Aeronautics and Astronautics,2018,44(7):1347-1358. DOI: 10.13700/j.bh.1001-5965.2017.0568




计量
- 文章访问数: 184
- HTML全文浏览量: 51
- PDF下载量: 50
