
A filtering method for underground manipulator communication signal
-
摘要: 多自由度机械臂在煤矿井下作业时,其通信信号易受到脉冲、电磁干扰等外部因素的影响,降低信号传输可靠性,影响多自由度机械臂的灵活性和控制精度。为提高井下多自由度机械臂通信信号质量,提出了一种基于改进时频峰值滤波的井下机械臂通信信号滤波方法。根据机械臂通信信号的载波节点提取载波特征,基于希尔伯特变换理论提取传输周期特征。利用小波分解求解每一级小波变换系数,获取通信信号扰动频率,完成通信信号特征分类。引入相位补偿因子改进时频峰值滤波,根据比例因子和削减因子计算削减门限阈值,调整固定窗口长度,并采用改进时频峰值滤波滤除通信信号中的噪声,实现多自由度机械臂通信信号噪声抑制。以3自由度机械臂为试验对象,设置脉冲宽度为8 μs、波特率为120 bit/s,通信信号传输时间间隔为2 ms、信号幅度为1,向通信信号加入30 dB高斯白噪声。试验结果表明:经基于改进时频峰值滤波的井下机械臂通信信号滤波方法处理后的通信信号输出信噪比为94 dB,误码率基本稳定在0.6%,丢帧率均值由滤波前的2.9%降至0.8%,有效提高了多自由度机械臂通信信号质量和传输可靠性。Abstract: When a multi-degree-of-freedom manipulator operates in underground coal mines, its communication signal is easily affected by external factors such as pulses and electromagnetic interference. It reduces the reliability of signal transmission and affects the flexibility and control precision of the multi-degree-of-freedom manipulator. To improve the communication signal quality of underground multi-degree-of-freedom manipulator, a filtering method for underground manipulator communication signal based on improved time-frequency peak filtering is proposed. The method extracts carrier features based on the carrier nodes of the manipulator communication signal, and extracts transmission period features based on Hilbert transform theory. The method uses wavelet decomposition to solve the wavelet transform coefficient of each level, obtains the disturbance frequency of communication signals, and completes the classification of communication signal features. The method introduces phase compensation factors to improve time-frequency peak filtering. The reduction threshold is calculated according to the scaling factor and reduction factor, so as so adjust the fixed window length. The improved time-frequency peak filtering is used to filter the noise in communication signals. Thus the noise suppression of the multi-degree-of-freedom manipulator communication signal is achieved. A 3-degree-of-freedom manipulator is taken as the experimental object. The pulse width is set to be 8 μs. The Baud rate is 120 bit/s, the communication signal transmission interval is 2 ms, and the signal amplitude is 1. 30 dB Gaussian white noise is added to the communication signal. The experimental results show that the output signal-to-noise ratio of the communication signal processed by the filtering method for underground manipulator communication signal based on improved time-frequency peak filtering is 94 dB. The bit error rate is basically stable at 0.6%, and the average frame loss rate is reduced from 2.9% before filtering to 0.8%. The method effectively improves the communication signal quality and transmission reliability of the multi-degree-of-freedom manipulator.
-
0. 引言
具有3个及以上可自由编程轴的机械臂称为多自由度机械臂,具有精度高、速度快、灵活性强的特点,在煤矿井下采样作业中高频使用[1-3]。但井下作业环境恶劣,多自由度机械臂通信信号易受脉冲噪声和电磁干扰等外部因素影响,导致在决策多自由度机械臂状态、调节关节角控制量、控制运行轨迹过程中产生大量相似特征频谱,干扰指令信号传输,导致输出端信噪比较低、信号丢帧率和误码率较高,降低多自由度机械臂的灵活性和控制精度,甚至产生误操作而造成生产事故。因此,有必要对井下多自由度机械臂通信信号进行滤波,抑制噪声,以提升机械臂控制性能。
在工业控制领域,有学者针对机械臂通信信号噪声抑制进行了研究。李正楠等[4]提出了多关节机械臂反演滑模神经网络干扰观测器控制方法,对多关节机械臂不确定干扰通信信号进行观测补偿,实现机械臂末端轨迹自适应跟踪,但该方法未对通信信号进行高低频分类,信噪比较低。张润梅等[5]提出了多关节机械臂干扰观测器的自适应滑模控制方法,观测机械臂通信干扰信号,通过自适应律进行估计补偿,但未提取通信信号的传输周期特征,导致通信丢帧率较高。丁力等[6]利用线性扩张状态观测器进行空中采样机械臂的抗干扰控制,通过线性扩张状态观测器估计并补偿机械臂通信总干扰,采用快速连续非奇异终端滑模面提升观测器的稳定性,但所用的观测器未有效分解各频率信号,输出信噪比较低,信号质量不佳。
目前对于井下多自由度机械臂通信信号去噪的研究较少。本文基于现有研究成果,提出了一种井下机械臂通信信号滤波方法。根据机械臂通信信号载波节点提取载波特征,基于希尔伯特变换理论提取传输周期特征。对提取的机械臂通信信号特征进行小波分解,将通信信号划分为低频信号与高频信号,获取信号扰动频率,实现信号特征分类。引入相位补偿因子改进时频峰值滤波,在去噪的同时保留有效信号,完成多自由度机械臂通信信号噪声抑制。
1. 多自由度机械臂通信信号特征提取
多自由度机械臂通信信号特征主要是载波特征和传输周期特征。
1.1 载波特征提取
通信信号的载波特征即通信过程中信号的电磁波特征,主要包括载波频率、载波强度(功率)。通过频谱分析对井下多自由度机械臂通信信号的载波强度进行物理性归纳。
$$ E = \frac{{\left| {2y} \right|\vartheta }}{{\sqrt a }}{q^2} $$ (1) 式中:$ E $为通信信号的载波强度;$ y $为机械臂通信信号的载波强度分布系数;$ \vartheta $为信号强度衰减系数;$ a $为机械臂通信信号负载阻抗;$ q $为信号电压。
根据通信信号载波频率相异性和求取的载波强度提取通信信号载波特征。机械臂通信单节点信号载波特征为
$$ A = E(r\partial + u \beta ) $$ (2) 式中:$ r $为通信信号调制指数;$ \partial $为基带频率;$ u $为多自由度机械臂信号调制频率;$ \beta $为载波初始频率。
在实际应用中,多自由度机械臂通信载波信号要向多个关节传输,具有不同的传输周期,因此需在载波特征基础上提取传输周期特征。
1.2 传输周期特征提取
多自由度机械臂通信信号传输周期易受脉冲噪声和电磁干扰影响,难以提取。根据希尔伯特变换理论[7]计算通信信号传输频率门限均值[8],以提取信号传输周期特征。
$$ I = \dfrac{{\displaystyle \sum\limits_{l = 1}^R {{A_l}{u_l}} }}{{{{({\varepsilon _1} - {\varepsilon _0})}^2}}} $$ (3) 式中:I为通信信号传输频率门限均值;Al为第l(l=1,2,…,R,R为希尔伯特变换运行次数)次传输的信号载波特征;$ {u_l} $为第l次传输的信道数量;$ {\varepsilon _1} $为通信信号传输频率预测值;$ {\varepsilon _0} $为通信信号传输频率实际值[9]。
在多自由度机械臂通信信号传输周期稳定不变的情况下,提取信号的传输周期特征:
$$ L = \frac{{\lambda {A_l} - \overline t _{\rm{p}}}}{I} $$ (4) 式中:$ \lambda $为信号传输占空比;$ \overline t_{\rm{p}} $为信号传输中脉冲持续的时间长度均值。
通过上述方法完成多自由度机械臂通信信号特征提取,将特征值上传至信号传输单元,提高通信信号特征分类能力,为后续多自由度机械臂通信信号噪声抑制提供数据支持。
2. 多自由度机械臂通信信号滤波
2.1 基于小波分解的通信信号分类
基于多自由度机械臂通信信号特征对噪声信号和通信信号进行分类,进而对分离出的噪声信号进行有针对性的滤除。考虑多自由度机械臂通信信号分布在多维度空间,因此采用小波变换分解信号,从高频和低频2个尺度,根据高斯白噪声对通信信号进行分类[10]。
$$ \left\{ \begin{gathered} {C_J} = \sum\limits_{}^{} {{C_{J - 1}}} p\left( x \right) + \log _2 {p\left( x \right)} \\ {D_J} = n\sum\limits_{}^{} {\left( {GA + HL} \right){C_J}} p\left( x \right) \\ \end{gathered} \right. $$ (5) 式中:$ {C_J} $,$ {D_J} $分别为小波分解第$ J $层的空间尺度系数和小波系数;$ p\left( x \right) $为通信信号$ x $的概率密度函数;$ n $为离散系数;$ G,H $分别为高通、低通滤波器滤波次数。
利用小波系数,从通信信号低频与高频尺度重构通信信号:
$$ f\left( x \right) = {D_J} \frac{{\left| {xn + c} \right| \ \left| {xn + b} \right|}}{J} $$ (6) 式中$c $,$ b $分别为信号的低频、高频尺度参数。
以高斯白噪声$ \varphi $作为特征分类标准,计算通信信号中扰动噪声的频率识别结果:
$$ \xi = \frac{{{\sigma _ { \varphi} }f\left( x \right)}}{J} $$ (7) 式中$ \sigma _ { \varphi}$为通信信号与高斯白噪声$ \varphi $的频率方差。
根据噪声频率识别结果,将多自由度机械臂通信信号中的噪声分离出来。
$$ N^\prime{\left( x \right) } = {\rm{mad}}\left( { \frac{{\left| \xi \right|}} {{\varphi f\left( x \right)}} } \right)$$ (8) 式中$ {\rm{mad}} $(·)为峰值估计函数。
2.2 基于改进时频峰值滤波的噪声抑制
2.2.1 通信信号瞬时频率转换
多自由度机械臂通信信号中的噪声具有瞬时特征,经噪声分离后的通信信号中仍包含瞬时噪声。为了增强滤波效果,对通信信号进行瞬时频率转换,突出信号的瞬时频率,在一定程度上提升信号质量。
设$ U(x) $为分类后的有效信号,计算公式为
$$ U(x) = \xi ( {f(x) - N'(x)}) $$ (9) 对$ U(x) $进行瞬时频率转换,获得瞬时频率中的噪声信号:
$$ Z(x) = U(x){\gamma ^{2{\text{π}} \mu }} $$ (10) 式中:$ \gamma $为噪声信号的瞬时频率幅度;$ \mu $为频率调制指数。
将瞬时噪声信号与分类后的噪声信号融合,获得噪声信号估计值:
$$ \kappa \left( x \right) = \frac{{\left( {Z(x) + N^\prime{{\left( x \right)} }} \right)W}}{\mu } $$ (11) 式中$ W $为通信信号多频带分布融合系数。
至此便分离出全部噪声信号,之后对其进行滤除。
2.2.2 通信信号噪声抑制
考虑时频峰值滤波约束条件较少,能增强同相轴连续性,因此,采用时频峰值滤波提取通信信号标准差:
$$e = \frac{{ \displaystyle \sum\limits{{g_{\kappa \left( x \right)}}\iota - \kappa \left( x \right)} }}{{\kappa \left( x \right)}} $$ (12) 式中:$ {g_{\kappa \left( x \right)}} $为噪声信号的瞬时相位;$ \iota $为时频峰值滤波窗口长度。
时频峰值滤波采用固定长度窗口对多自由度机械臂通信信号频率成分进行估计,对于含噪声较多的信号,可直接剔除噪声,计算效率较高。但当信号存在部分信号频率损失时,直接剔除噪声将导致通信信号有效信息缺失[16-17]。对此,引入相位补偿因子$ \psi $和$ \eta $,得到改进的通信信号标准差:
$$ e' = \psi e + \left( {T - \alpha \iota } \right)\eta $$ (13) 式中:$ \psi $为削减因子;$ T $为削减门限阈值;$ \alpha $为窗口长度对应置信区间的重合度;$ \eta $为比例因子。
采用改进的通信信号标准差滤除所有多自由度机械臂通信信号中的噪声,输出噪声抑制后的信号结果,完成多自由度机械臂通信信号滤波处理[18-20]。
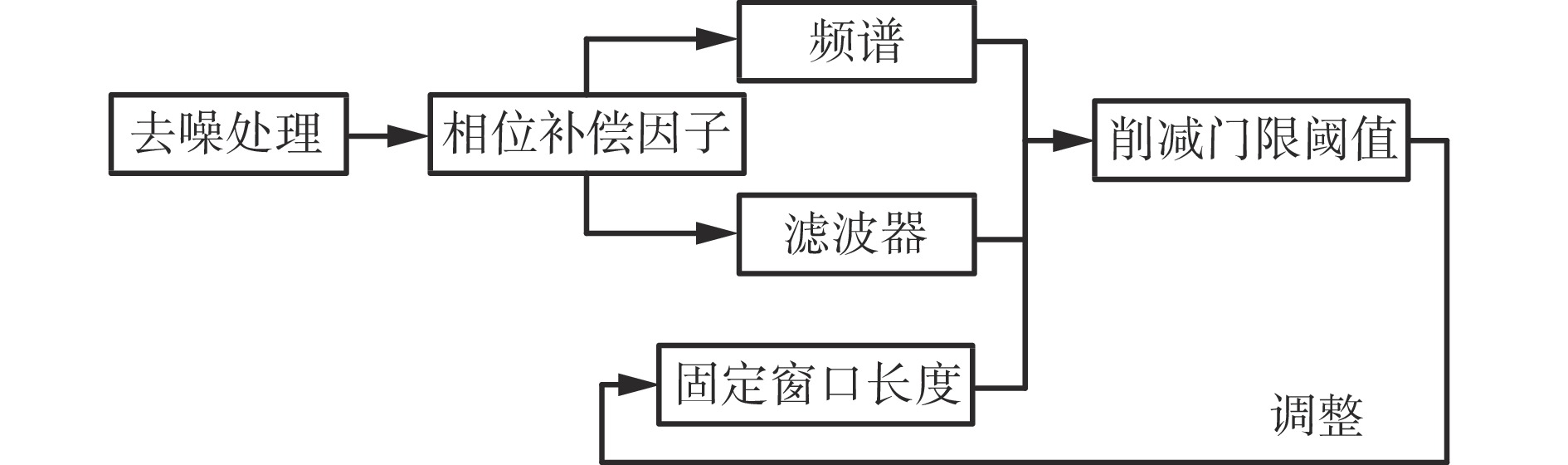
$$ F\left( x \right) = f\left( x \right)e - \kappa \left( x \right) $$ (14) 采用改进时频峰值滤波对多自由度机械臂通信信号进行降噪处理时,通过相位补偿因子使固定窗口长度随着削减门限阈值的变化而调整,可增强时频分辨率,降低通信信号丢帧率,提升多自由度机械臂通信信号幅度平稳性。改进时频峰值滤波流程如图1所示。
3. 试验验证
3.1 试验设置
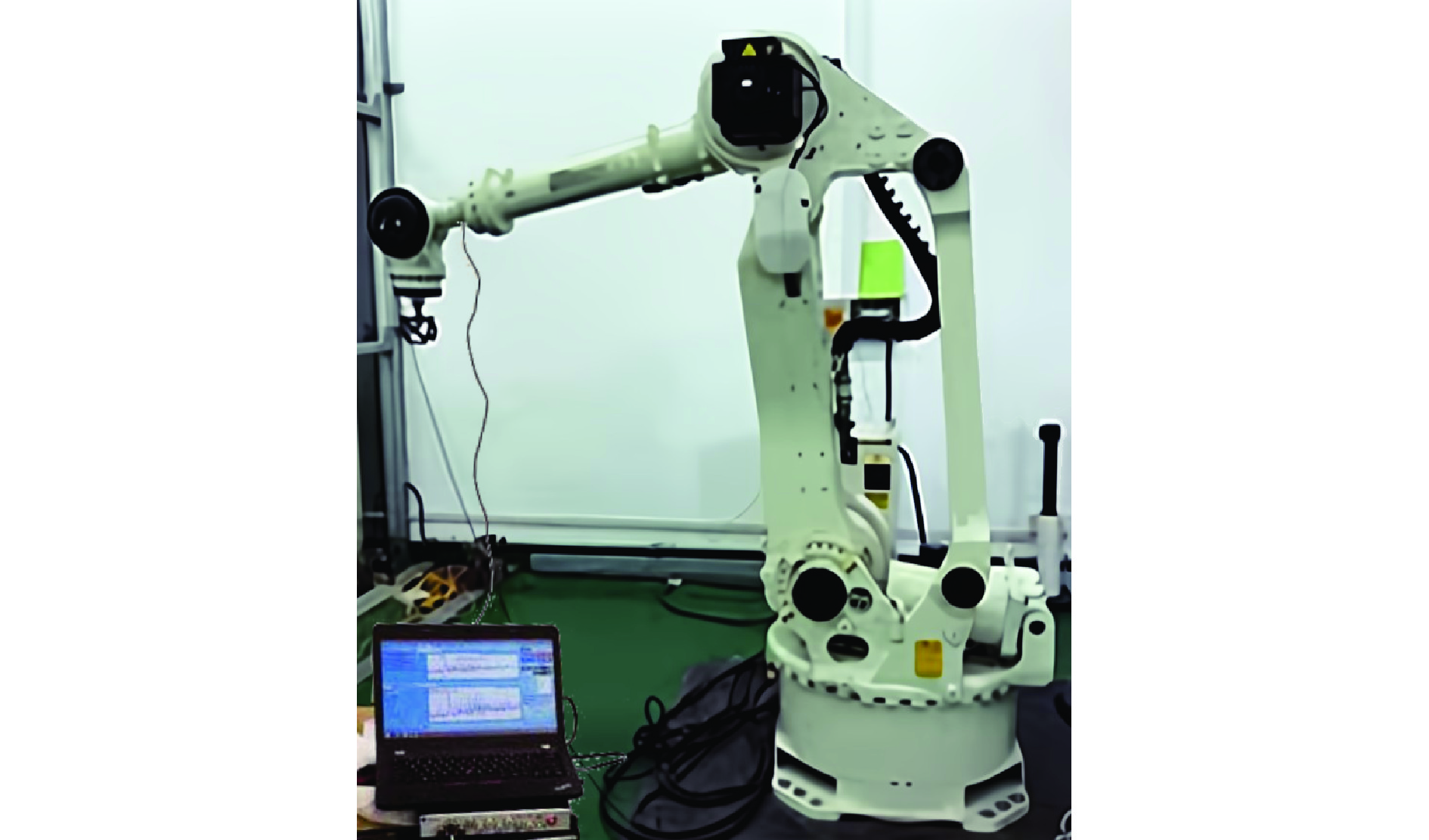
选择煤矿井下常用的3自由度机械臂作为试验对象。设定脉冲宽度为8 μs,波特率为120 bit/s,每2次通信信号传输时间间隔为2 ms,信号幅度为1。仿真平台为Matlab R2019b。试验平台如图2所示,计算机软硬件配置见表1。
表 1 计算机配置Table 1. Computer configuration项目 参数 硬件 CPU i3 2120 主频/GHz 3.3 物理内存/GiB 32 软件 操作系统 Windows 10 开发语言 Python 语料提取工具 NLP 向量训练工具 Fast Text 数据库处理工具 SQL Server 2019 试验环境模拟井下采掘工作面环境:温度为28~30 ℃,湿度为80%~100%,大气压为103~108 hPa,风流速度为2.5~3.0 m/s。多自由度机械臂承压5.5 MPa,导热系数为0.02 W/(m·℃)。
3.2 试验结果分析
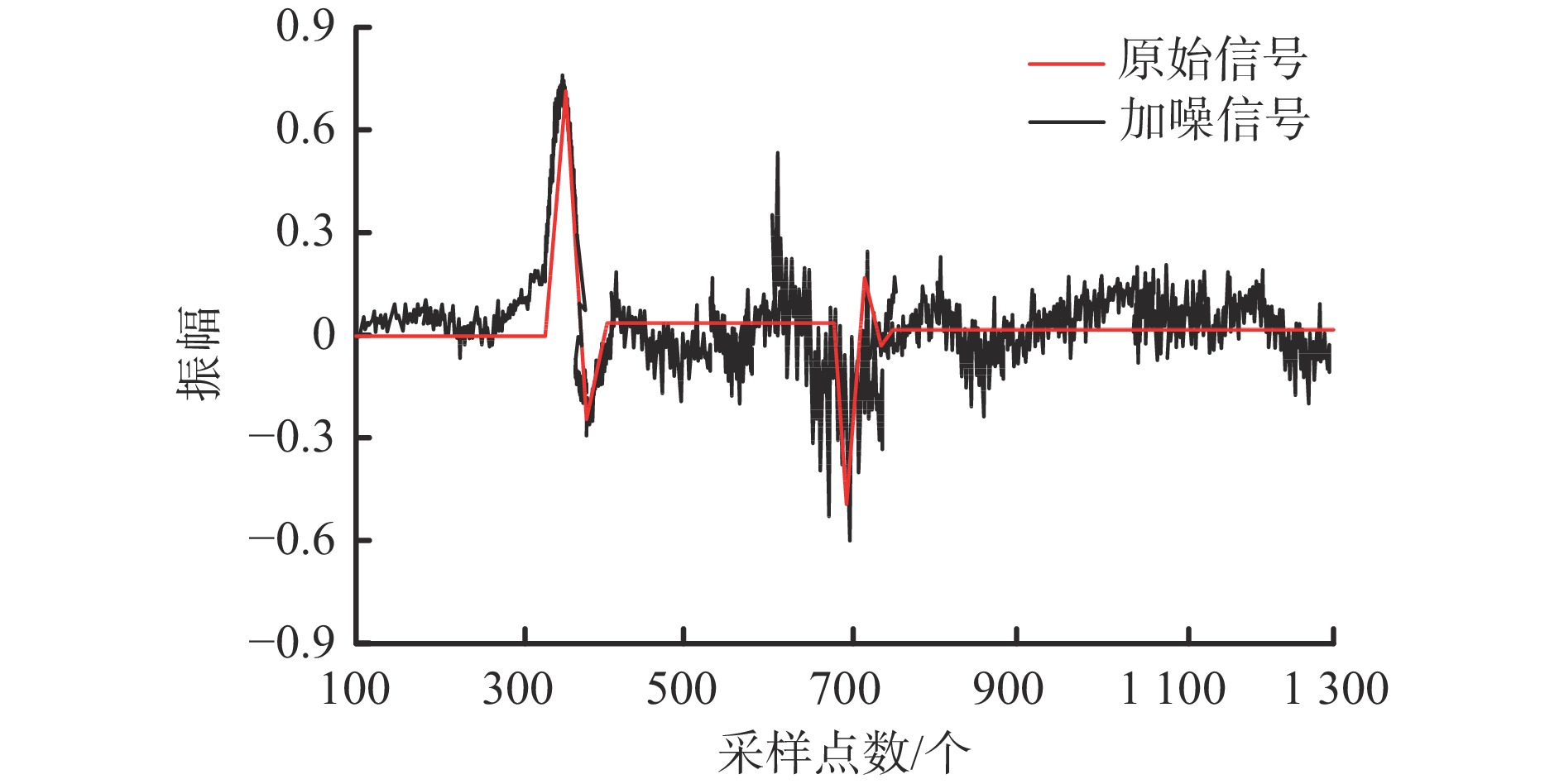
试验过程中生成1 794个通信信号离散数据,组成12.07 Gbit信号样本集,共计1 300个采样点。在样本集中加入30 dB高斯白噪声,使有效通信信号被噪声淹没,如图3所示。
分别采用文献[21]方法、文献[22]方法和本文方法对煤矿井下多自由度机械臂加噪通信信号进行滤波,测试输出信噪比、误码率,结果如图4所示。
![]() 图 4 信噪比和误码率对比试验结果Figure 4. Comparative experiment results of signal-to-noise ratio and bit error rate
图 4 信噪比和误码率对比试验结果Figure 4. Comparative experiment results of signal-to-noise ratio and bit error rate在实际应用中,信噪比达到60 dB即可满足通信信号高清传输要求。从图4(a)可看出,当滤波器频率响应达到120 MHz时,经本文方法处理的通信信号输出信噪比为94 dB,而其他2种方法的信噪比均低于80 dB,验证了本文方法可有效抑制通信信号噪声,通信质量较高。
从图4(b)可看出,随着采样点数量不断增加,采用3种方法处理的通信信号输出误码率均呈增大趋势,但本文方法的误码率始终较其他2种方法低;当采样点达到600个以上时,本文方法的误码率基本稳定在0.6%,而其他2种方法的误码率均高于0.8%,验证了本文方法通信可靠性较其他方法高。
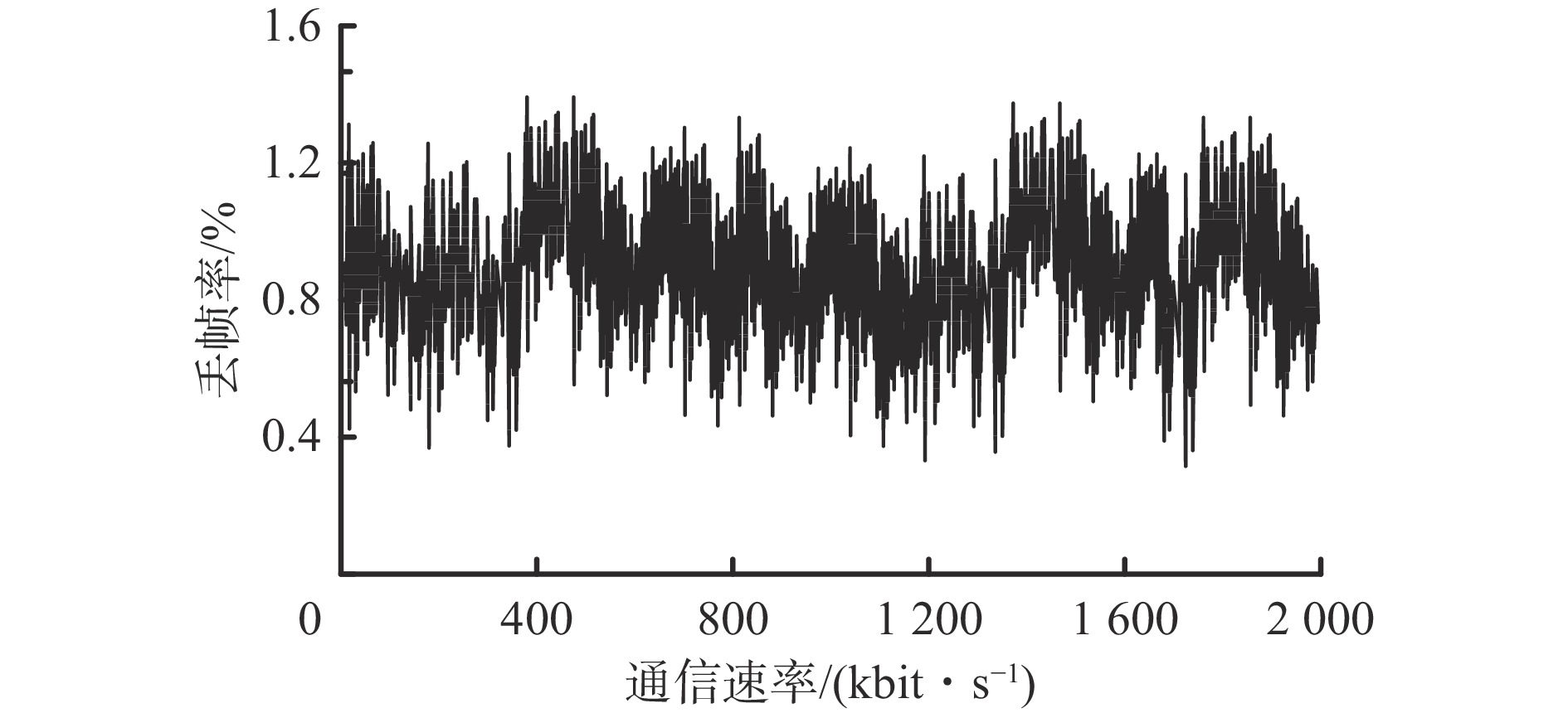
采用本文方法对通信信号进行滤波后,丢帧率如图5所示。可看出采用本文方法后,丢帧率均值为0.8%,仅在通信速率为420 kbit/s时达到最大值1.4%,较滤波前的2.9%大幅下降,表明本文方法可有效提高多自由度机械臂通信信号质量。
4. 结论
1) 提取矿井多自由度机械臂通信信号的载波特征和传输周期特征,可提高通信信号特征分类能力,降低脉冲噪声等因素干扰,提升多自由度机械臂通信信号质量。
2) 采用小波分解对通信信号瞬时频率进行转换,完成通信信号特征分类,提高通信传输可靠性。
3) 在时频峰值滤波中引入相位补偿因子,根据比例因子、削减因子计算削减门限阈值,调整固定窗口长度。采用改进时频峰值滤波对多自由度机械臂通信信号进行滤波,可降低信号丢帧率,提升信号平稳性。
4) 试验结果表明,采用改进时频峰值滤波抑制矿井多自由度机械臂通信信号中的噪声,可提高通信信号信噪比,降低丢帧率、误码率,抑制噪声性能较优。
-
![]()
图 4 信噪比和误码率对比试验结果
Figure 4. Comparative experiment results of signal-to-noise ratio and bit error rate
表 1 计算机配置
Table 1 Computer configuration
项目 参数 硬件 CPU i3 2120 主频/GHz 3.3 物理内存/GiB 32 软件 操作系统 Windows 10 开发语言 Python 语料提取工具 NLP 向量训练工具 Fast Text 数据库处理工具 SQL Server 2019  下载: 导出CSV
下载: 导出CSV
-
[1] 刘送永,徐海乔,张德义,等. 多自由度自动喷浆机械臂运动分析及路径优化[J]. 煤炭学报,2020,45(增刊2):1079-1088. LIU Songyong,XU Haiqiao,ZHANG Deyi,et al. Motion analysis and path optimization of multi-DOF automatic shotcrete manipulator[J]. Journal of China Coal Society,2020,45(S2):1079-1088.
[2] 杨鹏民. 基于嵌入式Linux与深度视觉的井下多轴机械臂系统设计[J]. 煤炭工程,2022,54(12):90-96. YANG Pengmin. Design of underground multi-axis mechanical arm system based on embedded Linux and deep perception[J]. Coal Engineering,2022,54(12):90-96.
[3] 马宏伟,张烨,王鹏,等. 多机械臂煤矸石智能分拣机器人关键共性技术研究[J]. 煤炭科学技术,2023,51(1):427-436. MA Hongwei,ZHANG Ye,WANG Peng,et al. Research on key generic technology of multi-arm intelligent coal gangue sorting robot[J]. Coal Science and Technology,2023,51(1):427-436.
[4] 李正楠,殷玉枫,张锦,等. 多关节机械臂反演滑模神经网络干扰观测器控制[J]. 机械设计,2021,38(3):126-131. DOI: 10.13841/j.cnki.jxsj.2021.03.019 LI Zhengnan,YIN Yufeng,ZHANG Jin,et al. Disturbance observer control of the multi-joint manipulator based on the backstepping sliding mode's neural network[J]. Journal of Machine Design,2021,38(3):126-131. DOI: 10.13841/j.cnki.jxsj.2021.03.019
[5] 张润梅,罗谷安,袁彬,等. 多关节机械臂干扰观测器的自适应滑模控制[J]. 机械科学与技术,2021,40(10):1595-1602. ZHANG Runmei,LUO Gu'an,YUAN Bin,et al. Adaptive sliding mode control of disturbance observer for multi-joint manipulator[J]. Mechanical Science and Technology for Aerospace Engineering,2021,40(10):1595-1602.
[6] 丁力,姚勇,巢渊,等. 面向水质采样的绳驱动空中机械臂抗干扰控制[J]. 农业机械学报,2022,53(8):452-458. DING Li,YAO Yong,CHAO Yuan,et al. Disturbance rejection control for cable-driven aerial manipulator applied on water samples[J]. Transactions of the Chinese Society for Agricultural Machinery,2022,53(8):452-458.
[7] 阙红波,高扬,吴成攀,等. 基于扩展卡尔曼滤波和希尔伯特−黄变换瞬时频率的齿轮啮合刚度辨识算法[J]. 科学技术与工程,2021,21(8):3104-3111. QUE Hongbo,GAO Yang,WU Chengpan,et al. Gear meshing stiffness identification algorithm based on extended Kalman filter and Hilbert-Huang transform instantaneous frequency[J]. Science Technology and Engineering,2021,21(8):3104-3111.
[8] 刘高辉,刘军. 基于扩展粒子滤波算法的单载波通信信号载波跟踪方法研究[J]. 微电子学与计算机,2021,38(12):61-68. LIU Gaohui,LIU Jun. Research on the carrier tracking method of single-carrier communication signal based on extended particle filter algorithm[J]. Microelectronics & Computer,2021,38(12):61-68.
[9] 赵永梅. VMD和小波阈值重构的电力电缆局部放电信号去噪法[J]. 西安科技大学学报,2021,41(4):739-746. ZHAO Yongmei. Denoising method of cable partial discharge signals based on VMD and wavelet threshold reconstruction[J]. Journal of Xi'an University of Science and Technology,2021,41(4):739-746.
[10] 邓云云,陈克安,李豪,等. 噪声主观评价中的白噪声标准样本法及其应用[J]. 西北工业大学学报,2022,40(4):746-754. DOI: 10.1051/jnwpu/20224040746 DENG Yunyun,CHEN Ke′an,LI Hao,et al. The white noise standard sample method and application for subjective noise evaluation[J]. Journal of Northwestern Polytechnical University,2022,40(4):746-754. DOI: 10.1051/jnwpu/20224040746
[11] 邓黎,李伯中,金炜,等. 光纤非线性补偿中低通滤波器对DBP算法的影响[J]. 光通信技术,2021,45(7):10-13. DENG Li,LI Bozhong,JIN Wei,et al. Influence of low pass filter with optical fiber nonlinear compensation on DBP algorithm[J]. Optical Communication Technology,2021,45(7):10-13.
[12] 陈建国,黄宇,严南. 基于频谱修正的通信噪声信号峰值检测系统[J]. 科技通报,2021,37(4):33-36,41. CHEN Jianguo,HUANG Yu,YAN Nan. Simulation of software secret data loss prevention transmission based on mobile gateway[J]. Bulletin of Science and Technology,2021,37(4):33-36,41.
[13] 章小宝,陈巍. 基于时域有限差分的通信干扰信号广域监测[J]. 计算机仿真,2021,38(10):227-231. ZHANG Xiaobao,CHEN Wei. Wide-area monitoring of communication interference signals based on finite difference time domain[J]. Computer Simulation,2021,38(10):227-231.
[14] 王永杰. 船岸通信技术下舰船导航信号非线性滤波[J]. 舰船科学技术,2022,44(20):139-142. WANG Yongjie. Nonlinear filtering of ship navigation signal based on ship shore communication technology[J]. Ship Science and Technology,2022,44(20):139-142.
[15] 林家锴,衣文索. 基于M−Z干涉结构的低频信号相位解调方法[J]. 光通信技术,2022,46(4):94-96. LIN Jiakai,YI Wensuo. Phase demodulation method of low frequency signal based on M-Z interference structure[J]. Optical Communication Technology,2022,46(4):94-96.
[16] 张霄霄,梁兴东,王杰,等. 融合失配处理和LMS滤波的雷达通信一体化OFDM信号距离旁瓣抑制技术[J]. 信号处理,2021,37(9):1727-1738. ZHANG Xiaoxiao,LIANG Xingdong,WANG Jie,et al. Range sidelobe suppression using mismatching and LMS adaptive filter for radar communication integrated OFDM signal[J]. Journal of Signal Processing,2021,37(9):1727-1738.
[17] 朱雨男,王彪,张岑. 基于深度神经网络的水声FBMC通信信号检测方法[J]. 声学技术,2021,40(2):199-204. DOI: 10.16300/j.cnki.1000-3630.2021.02.008 ZHU Yunan,WANG Biao,ZHANG Cen. DNN based signal detection for underwater acoustic FBMC communications[J]. Technical Acoustics,2021,40(2):199-204. DOI: 10.16300/j.cnki.1000-3630.2021.02.008
[18] 李冬霞,陈佩,刘海涛,等. 测距仪干扰信号频域特性研究[J]. 中国民航大学学报,2021,39(2):16-20,41. LI Dongxia,CHEN Pei,LIU Haitao,et al. Frequency-domain characteristics of DME interference signal[J]. Journal of Civil Aviation University of China,2021,39(2):16-20,41.
[19] 陈晓威,杨文革. 基于时变白化滤波器的DSSS系统干扰盲检测[J]. 系统工程与电子技术,2021,43(7):1981-1988. CHEN Xiaowei,YANG Wenge. Blind jamming detection based on time variant whitener for DSSS systems[J]. Systems Engineering and Electronics,2021,43(7):1981-1988.
[20] 王伟屹,赵晔. 卡尔曼滤波算法下电力通信自动化监测系统设计[J]. 西安工程大学学报,2021,35(5):50-55. DOI: 10.13338/j.issn.1674-649x.2021.05.008 WANG Weiyi,ZHAO Ye. Design of power communication automatic monitoring system based on Kalman filter algorithm[J]. Journal of Xi'an Polytechnic University,2021,35(5):50-55. DOI: 10.13338/j.issn.1674-649x.2021.05.008
[21] BRAUN S, GAMPER H, REDDY C K A, et al. Towards efficient models for real-time deep noise suppression[C]. IEEE International Conference on Acoustics, Speech and Signal Processing, Toronto, 2021: 656-660.
[22] HALIMEH M M, HAUBNER T, BRIEGLEB A, et al. Combining adaptive filtering and complex-valued deep postfiltering for acoustic echo cancellation[C]. IEEE International Conference on Acoustics, Speech and Signal Processing, Toronto, 2021: 121-125.
-
期刊类型引用(2)
1. 韩影,高传磊,王宇璐,贾芳云,周晚. 输送机电液伺服装置分布式远程故障诊断专家系统优化设计. 环境技术. 2025(04): 127-132+137 .  百度学术
百度学术
2. 孙嘉泽. 基于改进小波包变换的机械臂振动信号噪声自动去除研究. 自动化应用. 2024(15): 38-41+44 . 百度学术
其他类型引用(0)

计量
- 文章访问数: 128
- HTML全文浏览量: 51
- PDF下载量: 20
- 被引次数: 2
