
The overall design for unmanned transportation system in the mining area
-
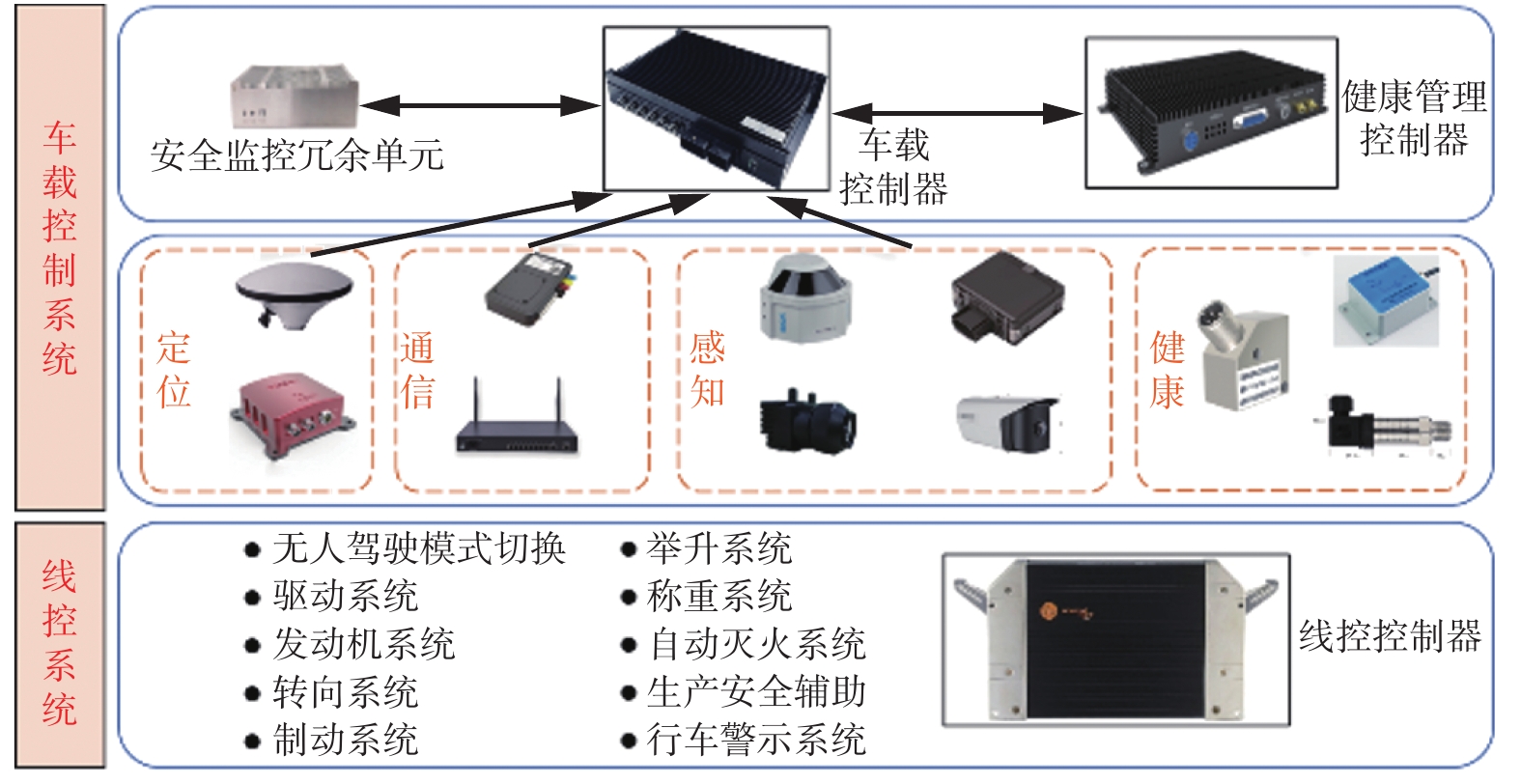
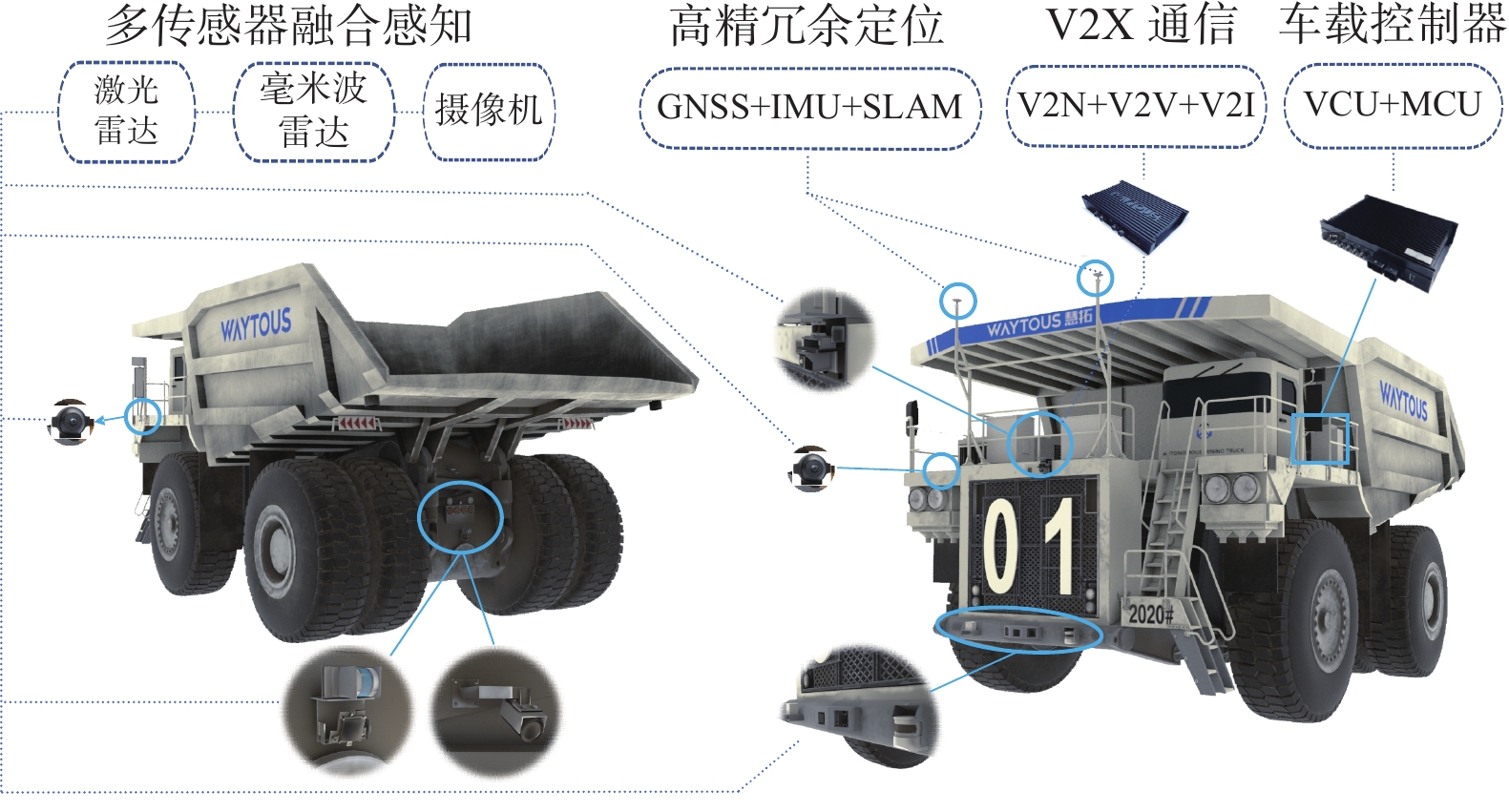
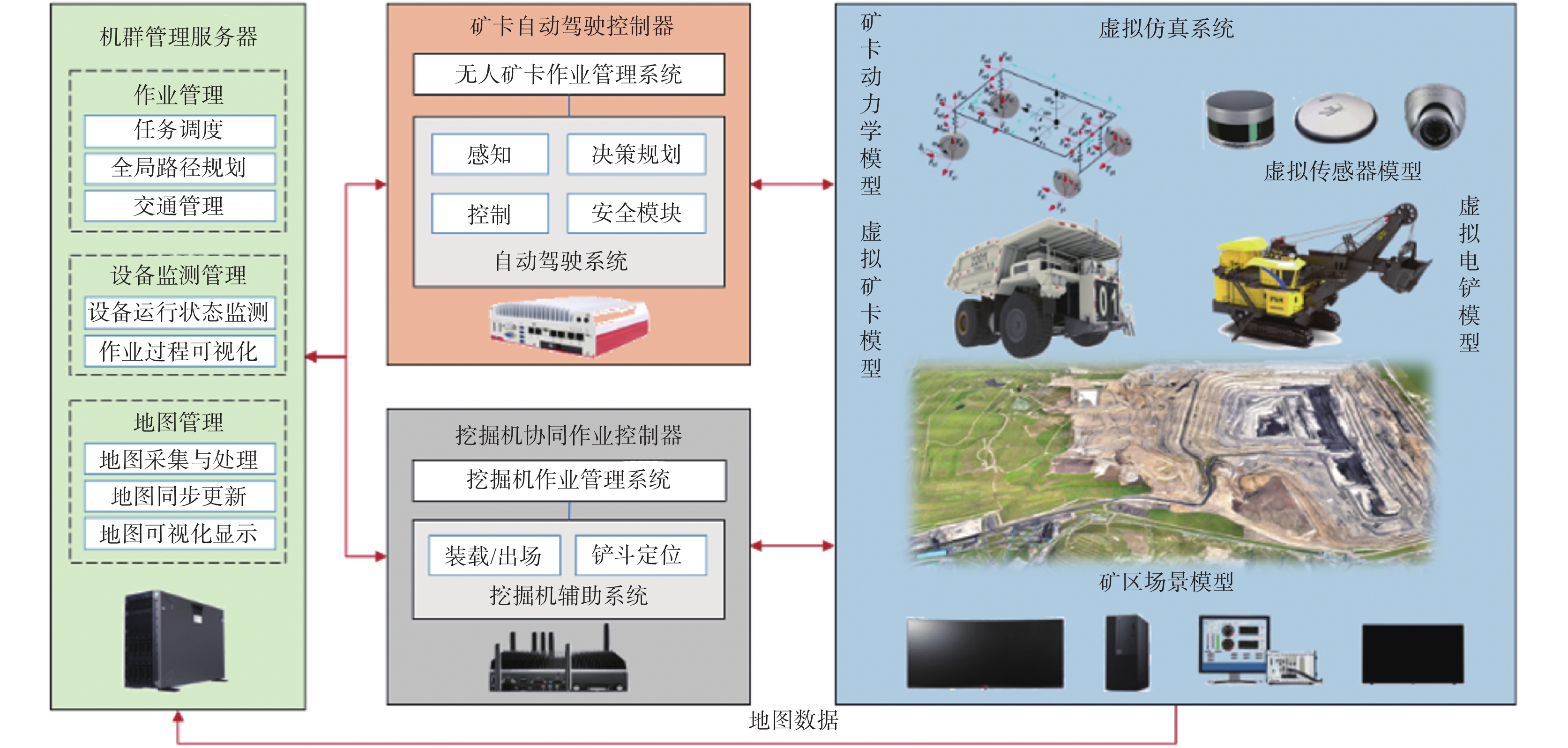
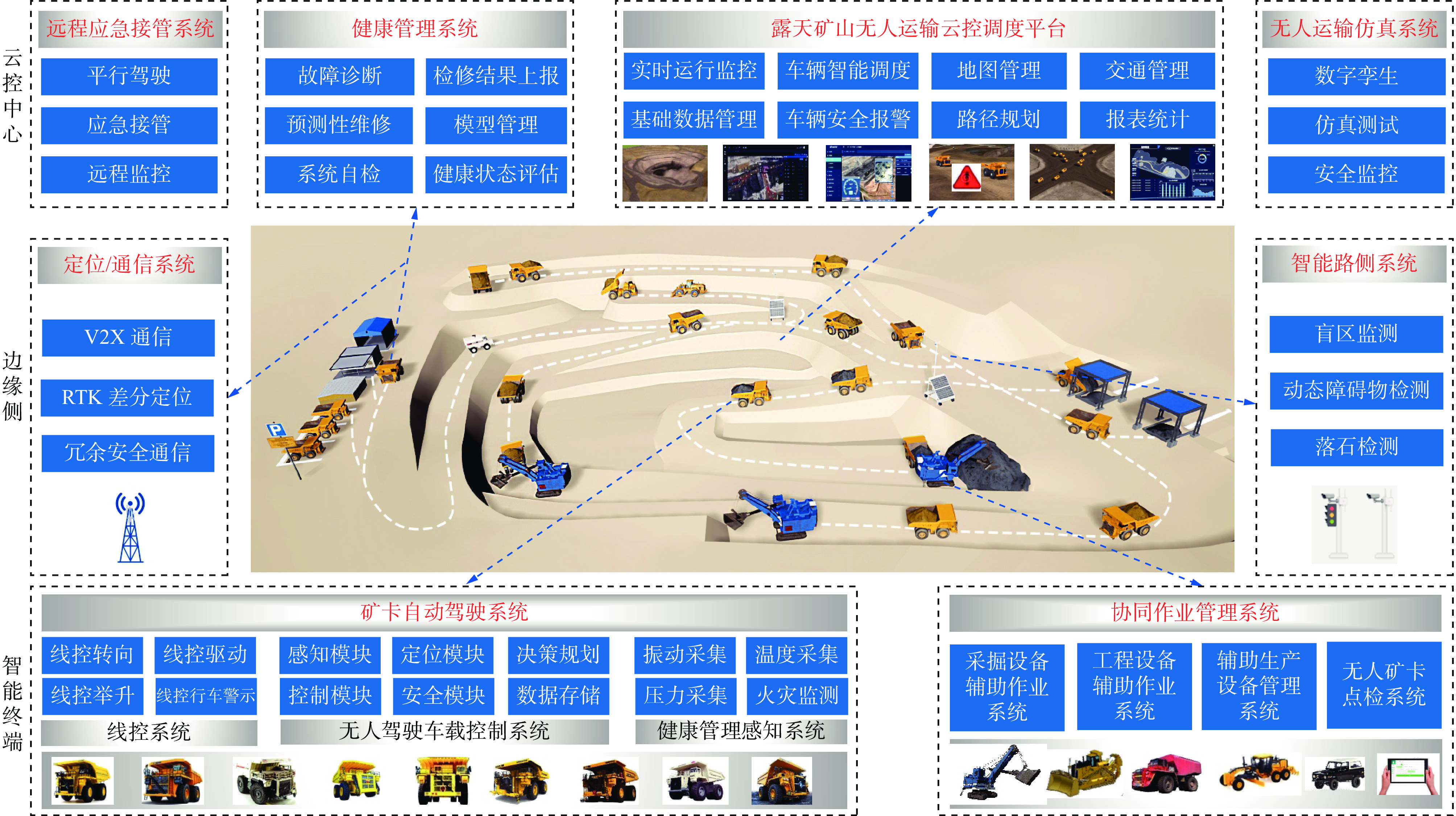
摘要: 目前针对无人驾驶矿用卡车的研究多集中在路径跟踪、安全通行辅助决策等具体控制方法上,不足以支撑整个矿区运输系统的无人化运营。针对该问题,提出了一种矿区无人运输系统总体设计方案。该系统分为云控中心、边缘侧、智能终端3层,主要包括矿用卡车自动驾驶系统、矿区无人运输云控调度平台、无人运输仿真系统、远程应急接管系统、健康管理系统、协同作业管理系统和定位/通信系统。矿用卡车自动驾驶系统具备单车智能管理功能,可实现障碍物感知、智能决策、路径规划、高精定位、精准控制等功能。云控调度平台用于统一调度管理,实现无人驾驶矿用卡车与电铲、推土机等的协同自动装载和卸载及无人驾驶矿用卡车与各类有人驾驶辅助作业车辆的协同混编作业。无人运输仿真系统根据矿山实时环境模拟不同调度运行方式,形成最优调度方案指导实际生产。远程应急接管系统可实现极端危险场景下无人驾驶矿用卡车的远程控制,确保在矿用卡车自动驾驶系统遇到故障时能够紧急接管车辆。健康管理系统通过安装在无人驾驶矿用卡车终端的相关传感器实现设备自检、故障诊断、检修结果上报、健康状态评估等功能。协同作业管理系统通过安装在有人采掘设备、工程设备、辅助生产设备上的软硬件系统,在保证人车安全的情况下协助无人驾驶矿用卡车共同完成作业。定位/通信系统实现云控中心与智能终端的通信连接,支持4G/5G/Mesh等多种通信方式,可实现V2N(车−网络)、V2V(车−车)和V2I(车−基础设施)通信。Abstract: At present, the research on unmanned mine trucks mainly focuses on specific control methods such as path tracking and aided decision-making for driving safety. The research is insufficient to support the unmanned operation of the whole mining area transportation system. To solve this problem, an overall design scheme for unmanned transportation system in the mining area is proposed. The system is divided into three layers of cloud control center, edge side and intelligent terminal. The system mainly comprises a mine truck automatic driving system, a mining area unmanned transportation cloud control dispatching platform, an unmanned transportation simulation system, a remote emergency takeover system, a health management system, a collaborative operation management system and a positioning/communication system. The automatic driving system of mine trucks has the function of intelligent management of a single vehicle. It realizes the functions of obstacle perception, intelligent decision-making, path planning, high-precision positioning and precise control. The cloud control dispatching platform is used for unified dispatching management. It realizes collaborative automatic loading and unloading of unmanned mine trucks, electric shovels and bulldozers. It also realizes collaborative mixed operation of unmanned mine trucks and various manned auxiliary operation vehicles. The unmanned transportation simulation system simulates different dispatching operation modes according to the real-time environment of the mine. It forms an optimal schedule scheme to guide actual production. The remote emergency takeover system realizes remote control of the unmanned mine truck in extremely dangerous scenarios. It ensures that the vehicle can be taken over urgently when the automatic driving system of the mine truck encounters a failure. The health management system realizes the functions of equipment self-inspection, fault diagnosis, maintenance result reporting and health state evaluation through the relevant sensors installed at the terminal of the unmanned mine truck. The collaborative operation management system assists the unmanned mine truck to complete the operation together under the condition of ensuring the safety of the driver and the vehicle. It is realized through the software and hardware systems installed on the manned mining equipments, engineering equipments and auxiliary production equipments. The positioning/communication system is the communication channel connecting the cloud control center and the intelligent terminal. It supports multiple communication modes such as 4G/5G/Mesh, and realizes V2N (vehicle-network), V2V (vehicle-vehicle) and V2I (vehicle-infrastructure) communication.
-
【编者按】无人驾驶运输技术作为煤矿智能化建设的关键部分,对于实现煤矿智能化运行、提升煤矿安全生产水平、保障煤炭稳定供应具有重要意义。近年来,随着人工智能、工业物联网、大数据等技术和煤矿智能化开采的深度融合,我国煤矿无人驾驶运输技术取得了一系列研究成果。为加快推动煤矿无人驾驶运输技术发展,《工矿自动化》于2022年第9期策划出版“煤矿无人驾驶运输技术”专栏。特别感谢国家能源集团煤炭运输部高级主管丁震对专栏组稿工作的大力支持!衷心感谢各位专家学者在百忙之中为本专栏撰稿!
-
![]()
图 1 矿区无人运输系统架构
Figure 1. Architecture of unmanned transportation system in mining area
-
[1] 王富民,贺昌斌. 露天矿卡车无人驾驶技术的现状与展望[J]. 露天采矿技术,2021,36(3):45-47. WANG Fumin,HE Changbin. Status and outlook of autonomous driving technology for trucks in open-pit mine[J]. Opencast Mining Technology,2021,36(3):45-47.
[2] 袁瑜. 矿用卡车的无人驾驶技术[J]. 矿业装备,2013(10):72-74. YUAN Yu. Autonomous driving technology for mine trucks[J]. Mining Equipment,2013(10):72-74.
[3] 丁震,孟峰. 矿用无人卡车国内外研究现状及关键技术[J]. 中国煤炭,2020,46(2):42-49. DING Zhen,MENG Feng. Domestic and overseas research status and key technologies of unmanned mine trucks[J]. China Coal,2020,46(2):42-49.
[4] 张涛,路向阳,李雷,等. 露天矿山运输无人驾驶关键技术与标准[J]. 控制与信息技术,2019(2):13-19. ZHANG Tao,LU Xiangyang,LI Lei,et al. Key technologies and standards of autonomous driving system applied in surface mines[J]. Control and Information Technology,2019(2):13-19.
[5] 付恩三,刘光伟,邸帅,等. 露天矿山无人驾驶技术及系统架构研究[J]. 煤炭工程,2022,54(1):34-39. FU Ensan,LIU Guangwei,DI Shuai,et al. Unmanned driving technology and system architecture in open-pit mines[J]. Coal Engineering,2022,54(1):34-39.
[6] 肖光林. 露天矿山运输无人驾驶关键技术与标准[J]. 设备管理与维修,2021(20):90-92. XIAO Guanglin. Key technologies and standards for unmanned transportation in open-pit mine transportation[J]. Plant Maintenance Engineering,2021(20):90-92.
[7] 陈龙,王晓,杨健健,等. 平行矿山:从数字孪生到矿山智能[J]. 自动化学报,2021,47(7):1633-1645. DOI: 10.16383/j.aas.2021.y000001 CHEN Long,WANG Xiao,YANG Jianjian,et al. Parallel mining operating systems:from digital twins to mining intelligence[J]. Acta Automatica Sinica,2021,47(7):1633-1645. DOI: 10.16383/j.aas.2021.y000001
[8] 化祖旭. 自动驾驶汽车路径跟踪控制算法综述[J]. 装备制造技术,2021(6):100-103. DOI: 10.3969/j.issn.1672-545X.2021.06.024 HUA Zuxu. Research on path tracking control for autonomous driving vehicles[J]. Equipment Manufacturing Technology,2021(6):100-103. DOI: 10.3969/j.issn.1672-545X.2021.06.024
[9] 李宏刚,王云鹏,廖亚萍,等. 无人驾驶矿用运输车辆感知及控制方法[J]. 北京航空航天大学学报,2019,45(11):2335-2344. DOI: 10.13700/j.bh.1001-5965.2019.0521 LI Honggang,WANG Yunpeng,LIAO Yaping,et al. Perception and control method of driverless mining vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics,2019,45(11):2335-2344. DOI: 10.13700/j.bh.1001-5965.2019.0521
[10] 高睿. 露天矿区无人驾驶矿车的安全通行辅助决策研究[D]. 重庆: 西南大学, 2021. GAO Rui. Research on aid decision-making for driving safety of uncrewed mining trucks in open-pit mine[D]. Chongqing: Southwest University, 2021.
[11] 张伦. 矿用自卸卡车无人驾驶线控改装[J]. 工矿自动化,2021,47(增刊1):88-90. ZHANG Lun. Linear control refit of mine-used self-unloading truck for driverless[J]. Industry and Mine Automation,2021,47(S1):88-90.
[12] 孟德将,田滨,蔡峰,等. 面向无人驾驶矿车的露天矿山道路坡度实时检测方法[J]. 测绘学报,2021,50(11):1628-1638. DOI: 10.11947/j.AGCS.2021.20210242 MENG Dejiang,TIAN Bin,CAI Feng,et al. Road slope real-time detection for unmanned truck in surface mine[J]. Acta Geodaetica et Cartographica Sinica,2021,50(11):1628-1638. DOI: 10.11947/j.AGCS.2021.20210242
[13] 汪玥玢. 矿山无人驾驶技术及发展前景分析[J]. 黄金,2020,41(3):48-50. DOI: 10.11792/hj20200310 WANG Yuebin. Driverless technology in mines and its development prospect analysis[J]. Gold,2020,41(3):48-50. DOI: 10.11792/hj20200310
[14] 李东林,路向阳,李雷,等. 露天矿山运输无人驾驶系统综述[J]. 机车电传动,2019(2):1-8. DOI: 10.13890/j.issn.1000-128x.2019.02.001 LI Donglin,LU Xiangyang,LI Lei,et al. An overview of autonomous open-pit mine haulage system[J]. Electric Drive for Locomotives,2019(2):1-8. DOI: 10.13890/j.issn.1000-128x.2019.02.001
[15] 赵浩,毛开江,曲业明,等. 我国露天煤矿无人驾驶及新能源卡车发展现状与关键技术[J]. 中国煤炭,2021,47(4):45-50. ZHAO Hao,MAO Kaijiang,QU Yeming,et al. Development status and key technology of driverless and new energy trucks in open-pit coal mine in China[J]. China Coal,2021,47(4):45-50.
[16] 康陈,郝大雨,王晓燕,等. 露天矿山智能网联自动驾驶场景与技术研究[J]. 信息通信技术与政策,2020(8):52-58. KANG Chen,HAO Dayu,WANG Xiaoyan,et al. Research on scene and technology of intelligent and connected driving in open mine[J]. Information and Communications Technology and Policy,2020(8):52-58.
[17] 杨孝新. 5G背景下智慧露天矿安全管理体系架构及创新应用研究[D]. 徐州: 中国矿业大学, 2021. YANG Xiaoxin. Study on intelligent open-pit mine safety management system architecture and innovative application under 5G background[D]. Xuzhou: China University of Mining and Technology, 2021.
-
期刊类型引用(1)
1. 王磊,孙凯,袁瑞甫,齐俊艳. 基于EtherCAT的液压支架智能控制系统研究. 河南理工大学学报(自然科学版). 2025(03): 53-63 .  百度学术
百度学术
其他类型引用(0)
 下载:
下载:


计量
- 文章访问数: 1135
- HTML全文浏览量: 118
- PDF下载量: 86
- 被引次数: 1
