
Research on pose measurement system of cantilever roadheader based on laser target tracking
-
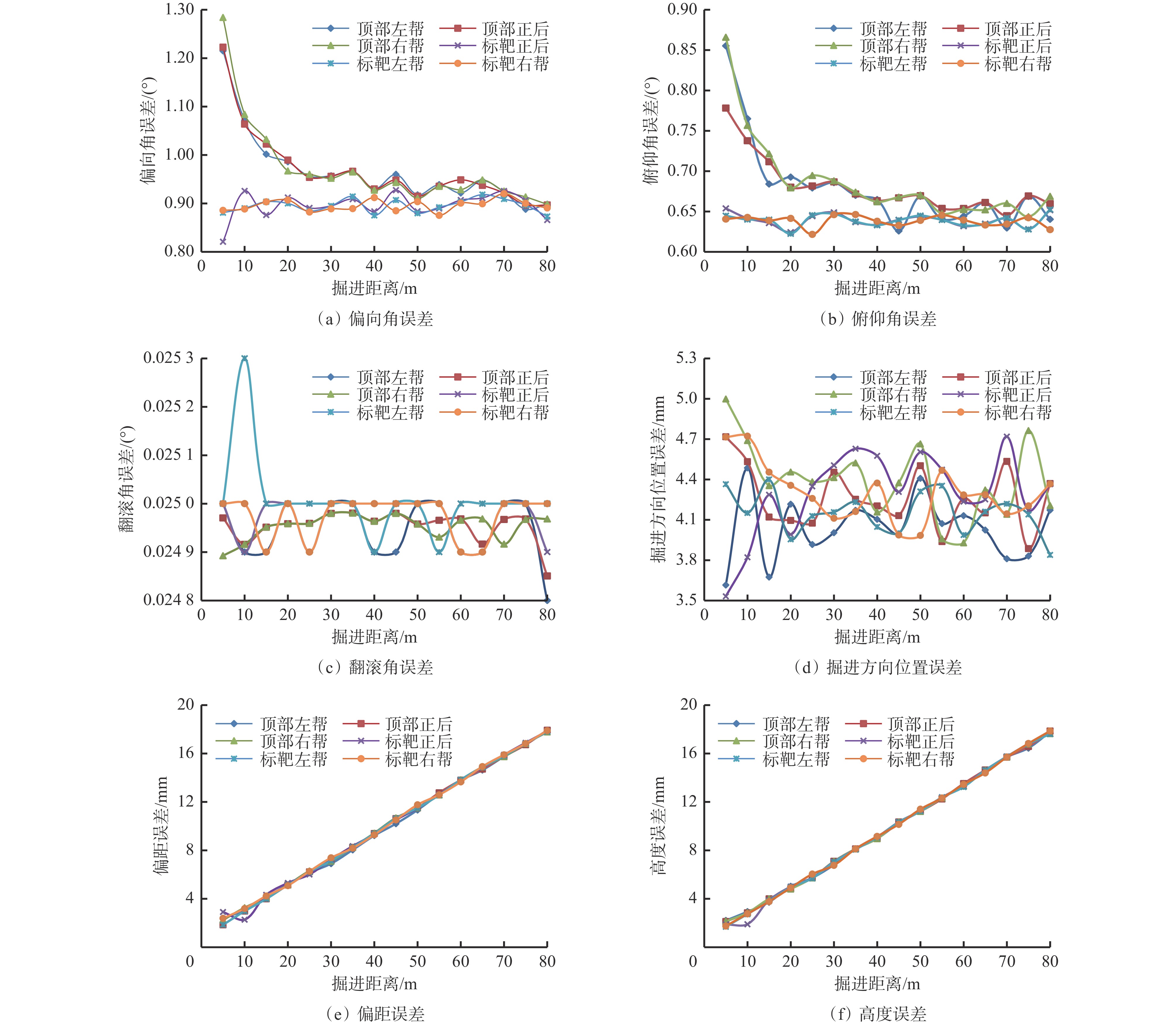
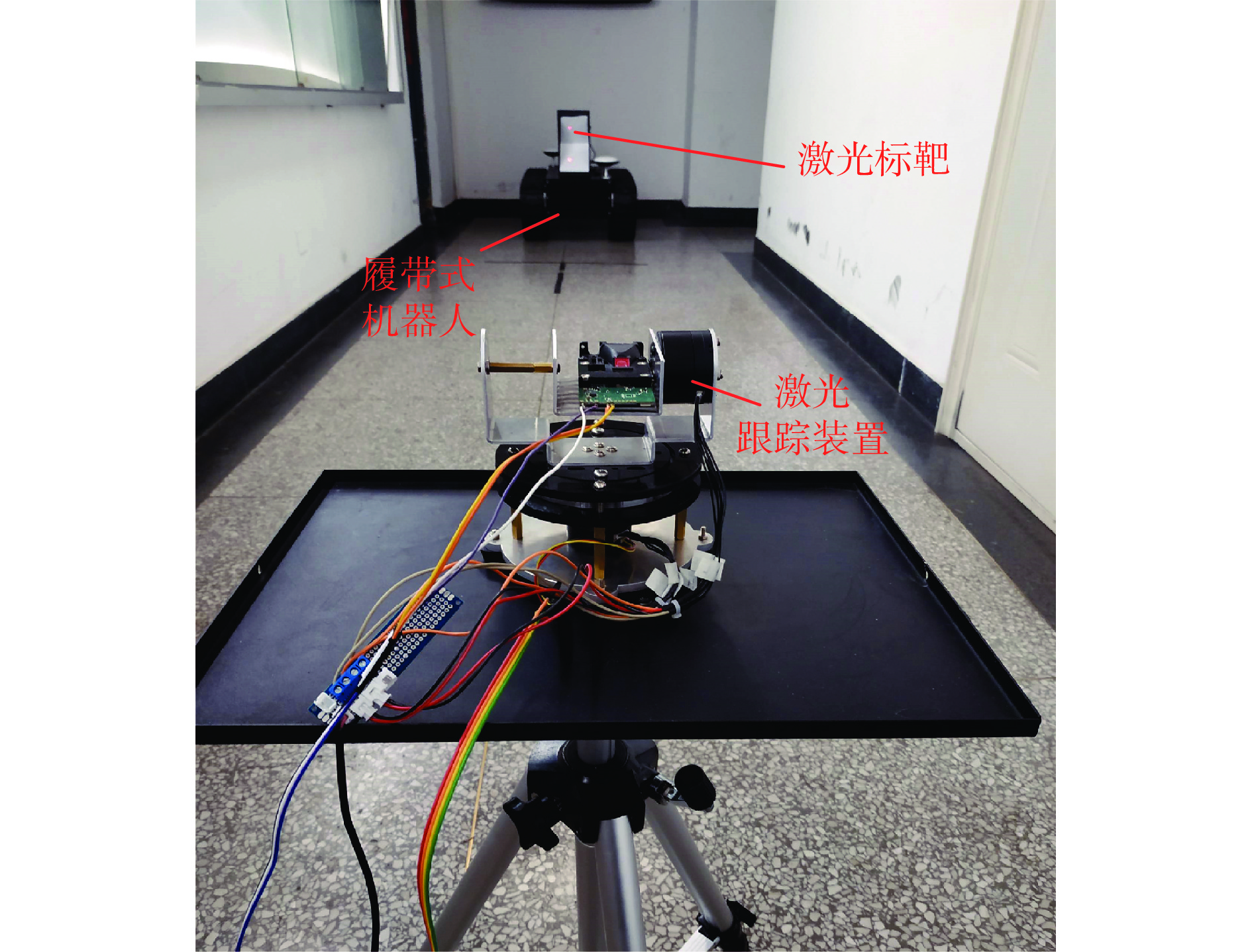
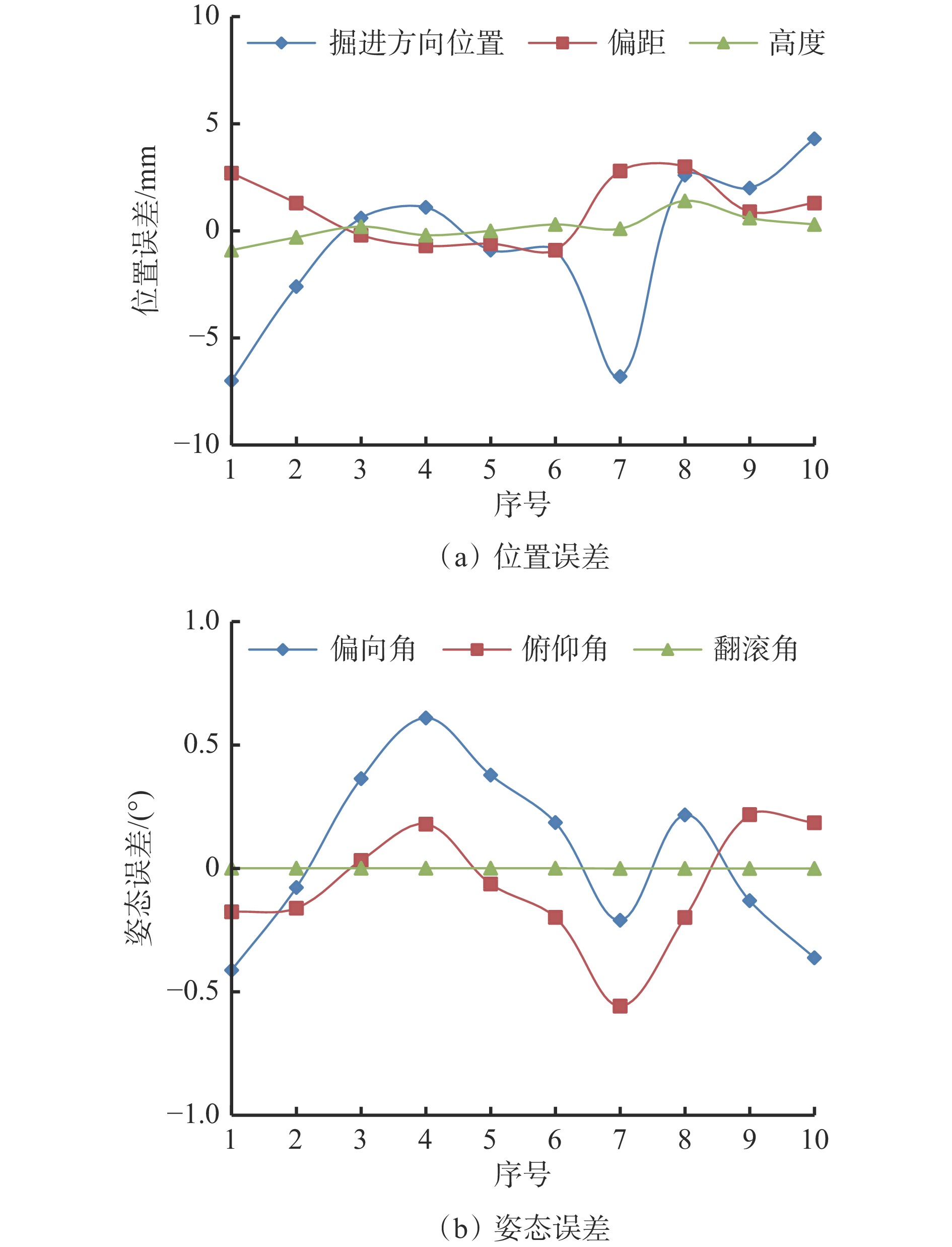
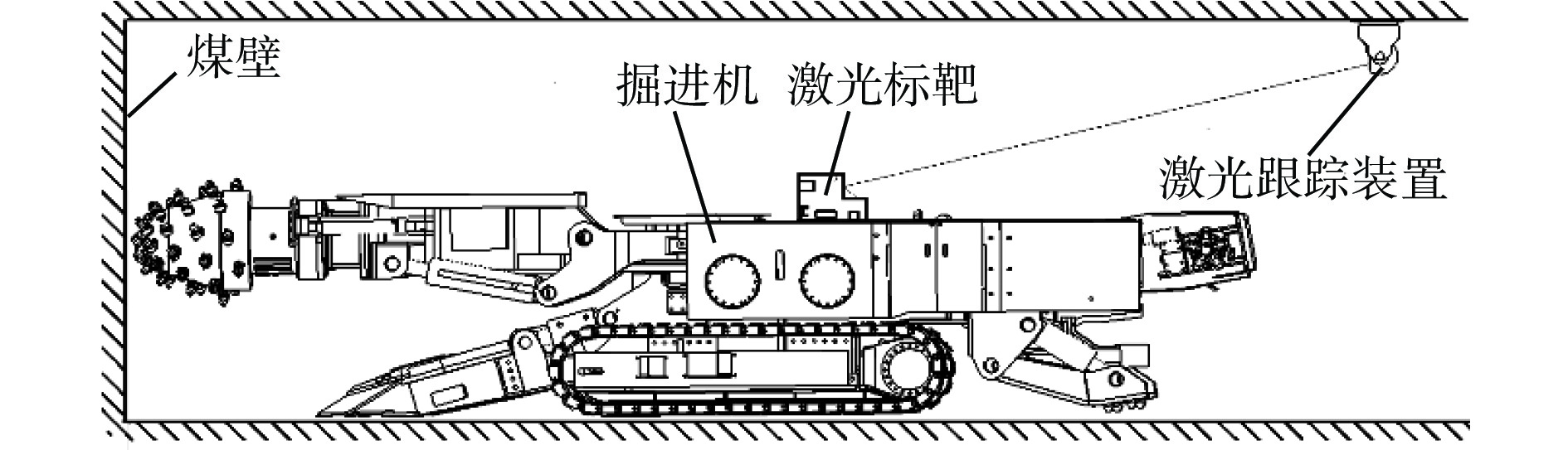
摘要: 掘进机位姿准确快速测量是煤矿巷道智能掘进的前提和基础。目前悬臂式掘进机位姿测量存在非绝对位姿测量、测量精度低、布置复杂或仅能测量少数位姿参数等问题,无法满足智能掘进需要。针对上述问题,在基于激光靶向跟踪的悬臂式掘进机位姿测量方法的基础上,设计了一种基于激光靶向跟踪的悬臂式掘进机位姿测量系统。该系统由激光跟踪装置和激光标靶组成,激光跟踪装置安装在巷道后方,发射激光到安装在悬臂式掘进机机身上的激光标靶上并跟踪激光标靶移动,通过求解激光跟踪装置、激光标靶、掘进机和巷道等坐标系间的转换矩阵即可测得掘进方向位置、偏距、高度、偏向角、俯仰角和翻滚角6个绝对位姿参数,实现了悬臂式掘进机在巷道大地坐标系中绝对位姿的全参数实时测量。分析了该系统的误差影响因素,仿真得到了其误差分布规律:随着掘进距离增加,掘进机姿态测量误差在一定范围内变化,偏距和高度测量误差呈线性增加趋势;在5~80 m测量范围内,掘进机偏向角、俯仰角和翻滚角测量误差分别小于1.4,1,0.03°,掘进方向位置测量误差小于5 mm,偏距和高度测量误差均小于20 mm。利用履带式机器人底盘搭建了位姿测量实验系统,开展了其在模拟巷道中的位姿测量实验,结果表明,掘进方向位置、偏距和高度测量误差均小于5 mm,偏向角测量误差小于1°,俯仰角测量误差小于0.6°,翻滚角测量误差可忽略不计,与仿真结果一致,证明了该系统的可靠性。Abstract: The accurate and rapid measurement of the roadheader pose is the premise and foundation of intelligent heading in coal mine roadway. The existing cantilever roadheader pose measurement has the problem of non-absolute pose measurement, low measurement precision, complex arrangement, or only a few pose parameters being measured. The measurement can not meet the intelligent heading requirement. In order to solve the above problems, based on the pose measurement method of the cantilever roadheader based on laser target tracking, a pose measurement system of cantilever roadheader based on laser target tracking is designed. The system consists of a laser tracking device and a laser target. The laser tracking device is arranged behind the roadway, emits laser to the laser target arranged on the cantilever roadheader fuselage, and tracks the movement of the laser target. By solving the conversion matrix between coordinate systems such as laser tracking device, laser target, roadheader and roadway, six absolute pose parameters such as heading direction position, offset, height, deviation angle, pitch angle and roll angle can be measured. The full parameter real-time measurement of absolute pose of cantilever roadheader in roadway coordinate system is realized. The error influence factors of the system are analyzed, and the error distribution law is obtained by simulation. With the increase of heading distance, the pose measurement error of roadheader changes within a certain range. The measurement errors of offset and height increase linearly. Within the measurement range of 5-80 m, the measurement errors of the deviation angle, pitch angle and roll angle of the roadheader are less than 1.4, 1, 0.03° respectively. The measurement error of the heading direction position is less than 5 mm, and the measurement errors of offset and height are less than 20 mm. Using the crawler robot chassis, an experimental system for pose measurement is built. The pose measurement experiment is carried out in the simulated roadway. The results show that the measurement errors of the heading direction position, offset and height are less than 5 mm. The measurement error of the deviation angle is less than 1°. The measurement error of the pitch angle is less than 0.6°. And the measurement error of the roll angle can be ignored. The results are consistent with the simulation results, which proves the reliability of the system.
-
-
![]()
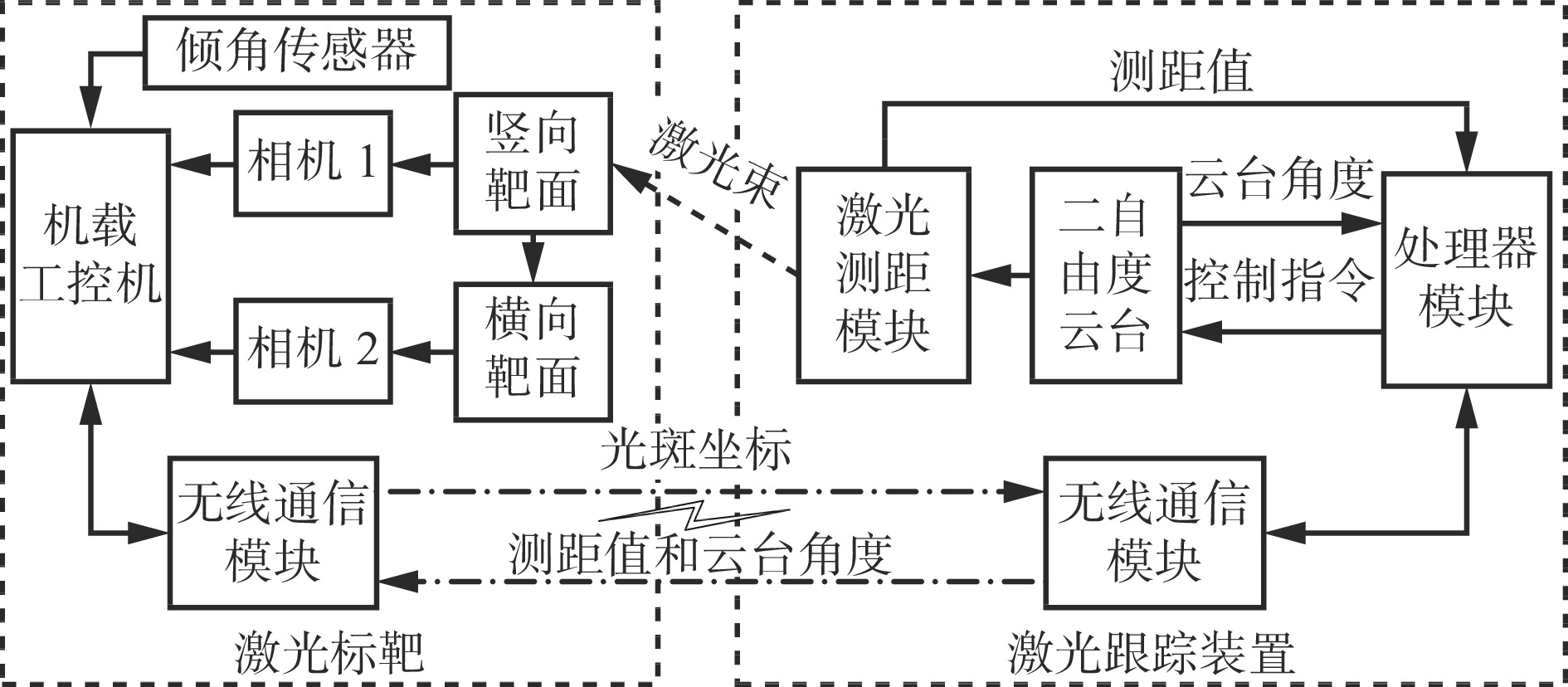
图 1 悬臂式掘进机位姿测量系统组成
Figure 1. Composition of pose measurement system of cantilever roadheader
![]()
图 2 悬臂式掘进机位姿测量系统结构与工作原理
Figure 2. Structure and operation principle of pose measurement system of cantilever roadheader
![]()
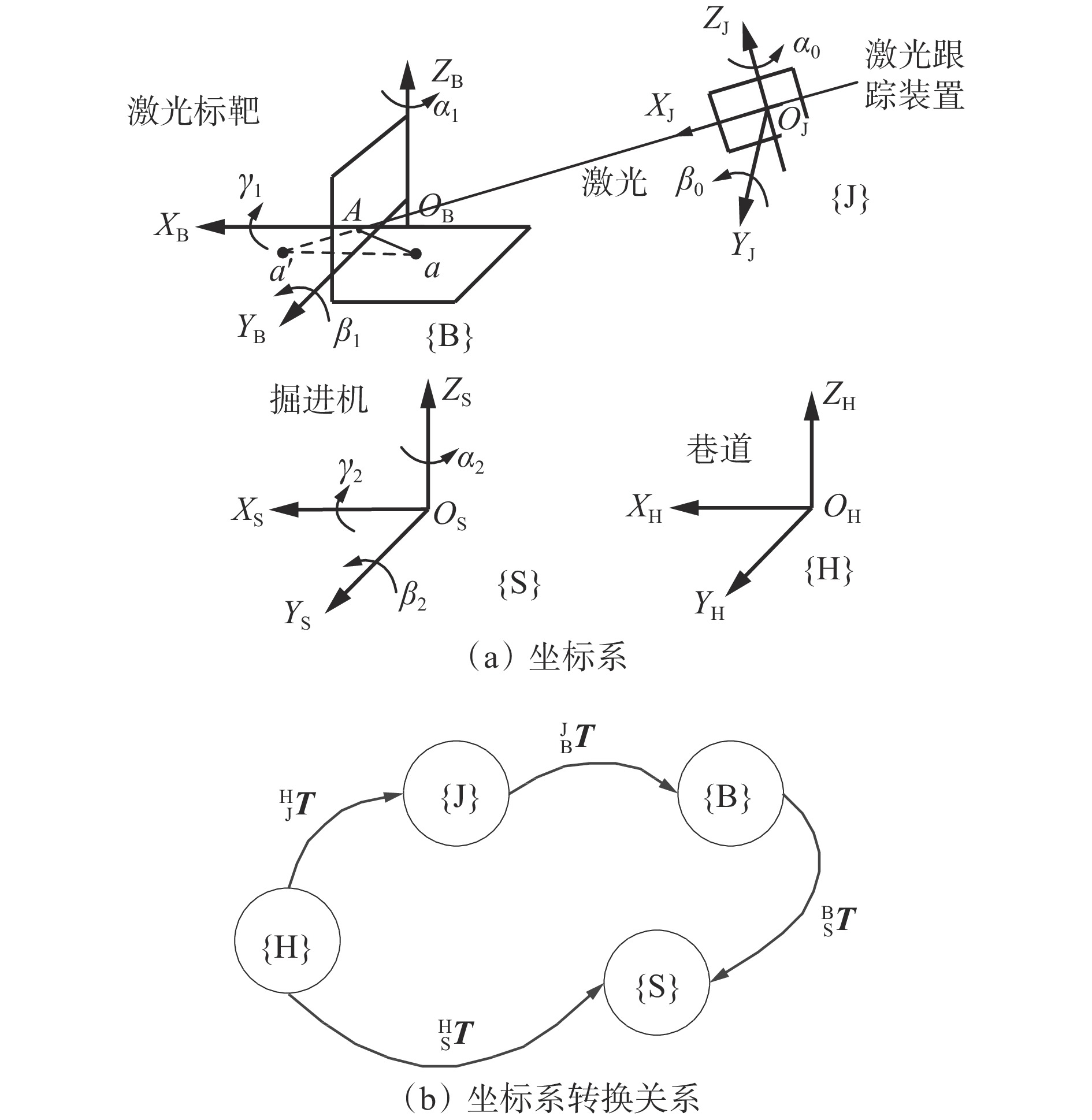
图 3 悬臂式掘进机位姿测量系统坐标系及其转换关系
Figure 3. Coordinate systems of pose measurement system of cantilever roadheader and their transform relationships
![]()
图 4 悬臂式掘进机位姿测量误差仿真曲线
Figure 4. The error simulation curves of pose measurement of cantilever roadheader
![]()
图 5 悬臂式掘进机位姿测量实验系统
Figure 5. Experimental system for pose measurement of cantilever roadheader
表 1 实验结果
Table 1 The experimental results
序号 x/mm y/mm z/mm α/(°) β/(°) γ/(°) 测量值 误差 测量值 误差 测量值 误差 测量值 误差 测量值 误差 测量值 误差 1 4506.0 −4.0 −325.3 2.7 367.1 −0.9 −2.413 −0.413 0.323 −0.177 0.001 0 2 4507.4 −2.6 −326.7 1.3 367.7 −0.3 −2.078 −0.078 0.338 −0.162 0.001 0 3 4510.6 0.6 −328.2 −0.2 368.2 0.2 −1.637 0.363 0.532 0.032 0.001 0 4 4511.1 1.1 −328.7 −0.7 367.8 −0.2 −1.391 0.609 0.679 0.179 0.001 0 5 4509.1 −0.9 −328.6 −0.6 368 0 −1.622 0.378 0.436 −0.064 0.001 0 6 4509.1 −0.9 −328.9 −0.9 368.3 0.3 −1.815 0.185 0.301 −0.199 0.001 0 7 5817.2 −2.8 198.8 2.8 435.1 0.1 −2.711 −0.211 0.441 −0.559 0 −0.001 8 5822.6 2.6 199.0 3.0 436.4 1.4 −2.284 0.216 0.801 −0.199 0 −0.001 9 5822.0 2.0 196.9 0.9 435.6 0.6 −2.631 −0.131 1.217 0.217 0 −0.001 10 5824.3 4.3 197.3 1.3 435.3 0.3 −2.863 −0.363 1.184 0.184 0 −0.001  下载: 导出CSV
下载: 导出CSV
-
[1] 王国法,赵国瑞,任怀伟. 智慧煤矿与智能化开采关键核心技术分析[J]. 煤炭学报,2019,44(1):34-41. WANG Guofa,ZHAO Guorui,REN Huaiwei. Analysis on key technologies of intelligent coal mine and intelligent mining[J]. Journal of China Coal Society,2019,44(1):34-41.
[2] 刘峰,曹文君,张建明,等. 我国煤炭工业科技创新进展及“十四五”发展方向[J]. 煤炭学报,2021,46(1):1-15. DOI: 10.13225/j.cnki.jccs.2021.0042 LIU Feng,CAO Wenjun,ZHANG Jianming,et al. Current technological innovation and development direction of the 14th Five-Year Plan period in China coal industry[J]. Journal of China Coal Society,2021,46(1):1-15. DOI: 10.13225/j.cnki.jccs.2021.0042
[3] 张国喜. 悬臂式掘进机惯性测量系统的改进与试验[J]. 江西煤炭科技,2021(2):238-240. DOI: 10.3969/j.issn.1006-2572.2021.02.080 ZHANG Guoxi. Transformation and experiment on inertial measurement system in cantilever roadheader[J]. Jiangxi Coal Science & Technology,2021(2):238-240. DOI: 10.3969/j.issn.1006-2572.2021.02.080
[4] 张超. 悬臂式掘进机双目视觉与捷联惯导组合定位技术研究[D]. 西安: 西安科技大学, 2020. ZHANG Chao. Research on integrated positioning technology of boom-type roadheader based on binocular vision and strapdown inertial navigation[D]. Xi'an: Xi'an University of Science and Technology, 2020.
[5] 张旭辉,刘博兴,张超,等. 掘进机全站仪与捷联惯导组合定位方法[J]. 工矿自动化,2020,46(9):1-7. ZHANG Xuhui,LIU Boxing,ZHANG Chao,et al. Roadheader positioning method combining total station and strapdown inertial navigation system[J]. Industry and Mine Automation,2020,46(9):1-7.
[6] 原世进. 基于iGPS的悬臂式掘进机位姿测定系统研究[J]. 煤矿现代化,2018(2):94-95, 98. DOI: 10.3969/j.issn.1009-0797.2018.02.037 YUAN Shijin. Research on the measuring system to heading cantilever's position and posture within iGPS[J]. Coal Mine Modernization,2018(2):94-95, 98. DOI: 10.3969/j.issn.1009-0797.2018.02.037
[7] 段笑蔚. 基于超宽带技术的掘进机自主定位定向方法研究[J]. 机械管理开发,2020,35(12):234-235, 267. DOI: 10.16525/j.cnki.cn14-1134/th.2020.12.100 DUAN Xiaowei. Research on self-positioning orientation method of roadheader based on ultra wide band technology[J]. Mechanical Management and Development,2020,35(12):234-235, 267. DOI: 10.16525/j.cnki.cn14-1134/th.2020.12.100
[8] 周玲玲,董海波,杜雨馨. 基于双激光标靶图像识别的掘进机位姿检测方法[J]. 激光与光电子学进展,2017,54(4):186-192. ZHOU Lingling,DONG Haibo,DU Yuxin. Method of roadheader position detection based on image recognition of double laser targets[J]. Laser & Optoelectronics Progress,2017,54(4):186-192.
[9] 吴淼,贾文浩,华伟,等. 基于空间交汇测量技术的悬臂式掘进机位姿自主测量方法[J]. 煤炭学报,2015,40(11):2596-2602. WU Miao,JIA Wenhao,HUA Wei,et al. Autonomous measurement of position and attitude of boom-type roadheader based on space intersection measurement[J]. Journal of China Coal Society,2015,40(11):2596-2602.
[10] 马一心,范百兴,黄剑. 多台激光跟踪仪联合动态位姿测量精度评定方法研究[J]. 测绘工程,2021,30(2):55-59. MA Yixin,FAN Baixing,HUANG Jian. Research on the evaluation method of the accuracy of combined dynamic position and attitude measurement of multiple laser trackers[J]. Engineering of Surveying and Mapping,2021,30(2):55-59.
[11] 邓国华. 基于激光导向器的悬臂式掘进机位置姿态自动测定方法[J]. 工矿自动化,2009,35(9):20-23. DENG Guohua. An automatic detecting method for position and posture of boom-type roadheader based on laser guide[J]. Industry and Mine Automation,2009,35(9):20-23.
[12] LI Jianguo,ZHAN Kai. Intelligent mining technology for an underground metal mine based on unmanned equipment[J]. Engineering,2018(4):381-391.
[13] DU Yuxin, TONG Minming, LIU Ting, et al. Visual measurement system for roadheaders pose detection in mines [J]. Optical Engineering, 2016, 55(10). DOI: 10.1117/1.OE.55.10.104107.
[14] 张超,张旭辉,杜昱阳,等. 基于双目视觉的悬臂式掘进机位姿测量技术研究[J]. 煤炭科学技术,2021,49(11):225-235. DOI: 10.13199/j.cnki.cst.2021.11.029 ZHANG Chao,ZHANG Xuhui,DU Yuyang. Measuring technique of cantilever roadheader position based on binocular stereo vision[J]. Coal Science and Technology,2021,49(11):225-235. DOI: 10.13199/j.cnki.cst.2021.11.029
[15] 薛光辉,张云飞,候称心,等. 基于激光靶向跟踪的掘进机位姿测量方法[J]. 矿业科学学报,2020,5(4):416-422. DOI: 10.19606/j.cnki.jmst.2020.04.008 XUE Guanghui,ZHANG Yunfei,HOU Chenxin,et al. Measurement of roadheader position and posture based on laser target tracking[J]. Journal of Mining Science and Technology,2020,5(4):416-422. DOI: 10.19606/j.cnki.jmst.2020.04.008
[16] 薛光辉,张云飞,候称心,等. 基于激光靶向扫描的掘进机位姿测量方法[J]. 煤炭科学技术,2020,48(11):19-25. DOI: 10.13199/j.cnki.cst.2020.11.003 XUE Guanghui,ZHANG Yunfei,HOU Chenxin,et al. Measurement of roadheader position and posture based on orientation laser scanning[J]. Coal Science and Technology,2020,48(11):19-25. DOI: 10.13199/j.cnki.cst.2020.11.003
[17] ZHU Jun,XU Zhengjie,FU Deli,et al. Laser spot center detection and comparison test[J]. Photonic Sensors,2019,9(1):49-52. DOI: 10.1007/s13320-018-0432-x
[18] 张鹏程,刘瑾,杨海马,等. 基于PSD的非均匀激光光斑中心定位研究[J]. 激光与红外,2020,50(8):941-947. DOI: 10.3969/j.issn.1001-5078.2020.08.007 ZHANG Pengcheng,LIU Jin,YANG Haima,et al. Research on center positioning of non-uniform laser spot based on PSD[J]. Laser & Infrared,2020,50(8):941-947. DOI: 10.3969/j.issn.1001-5078.2020.08.007
-
期刊类型引用(5)
1. 刘晓阳,刘旭,陈伟,王文清. 基于改进残差神经网络的滚动轴承故障检测. 计算机仿真. 2024(05): 81-87 .  百度学术
百度学术
2. 李晓旭. 结合Alexnet和极限学习机的网络模型的研究. 网络安全技术与应用. 2022(01): 37-38 . 百度学术
3. 刁英,王亚慧. 煤炭运输设备故障自动识别系统研究. 能源与环保. 2022(04): 228-233 . 百度学术
4. 吴冬梅,王福齐,李贤功,唐润,张新建. 轴承智能故障诊断. 工矿自动化. 2022(09): 49-55 . 本站查看
5. 杜菲,马天兵,胡伟康,吕英辉,彭猛. 基于小波变换和改进卷积神经网络的刚性罐道故障诊断. 工矿自动化. 2022(09): 42-48+62 . 本站查看
其他类型引用(0)
计量
- 文章访问数: 1045
- HTML全文浏览量: 41
- PDF下载量: 49
- 被引次数: 5
