
Research on unmanned driving system of underground trackless rubber-tyred vehicle in coal mine
-
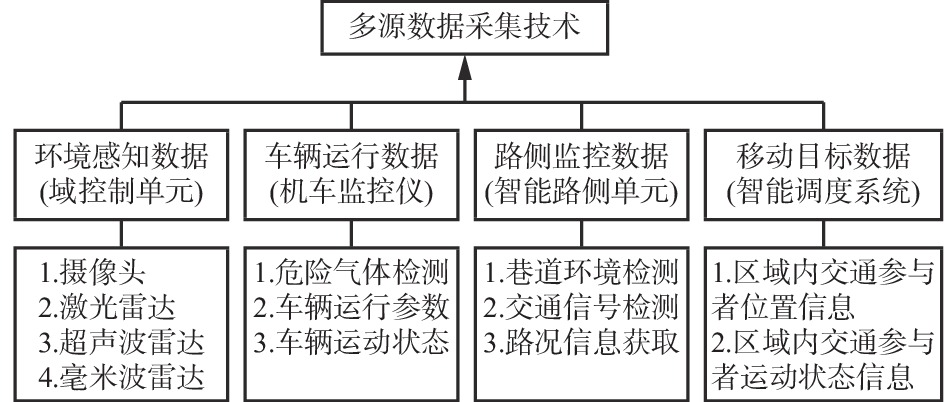
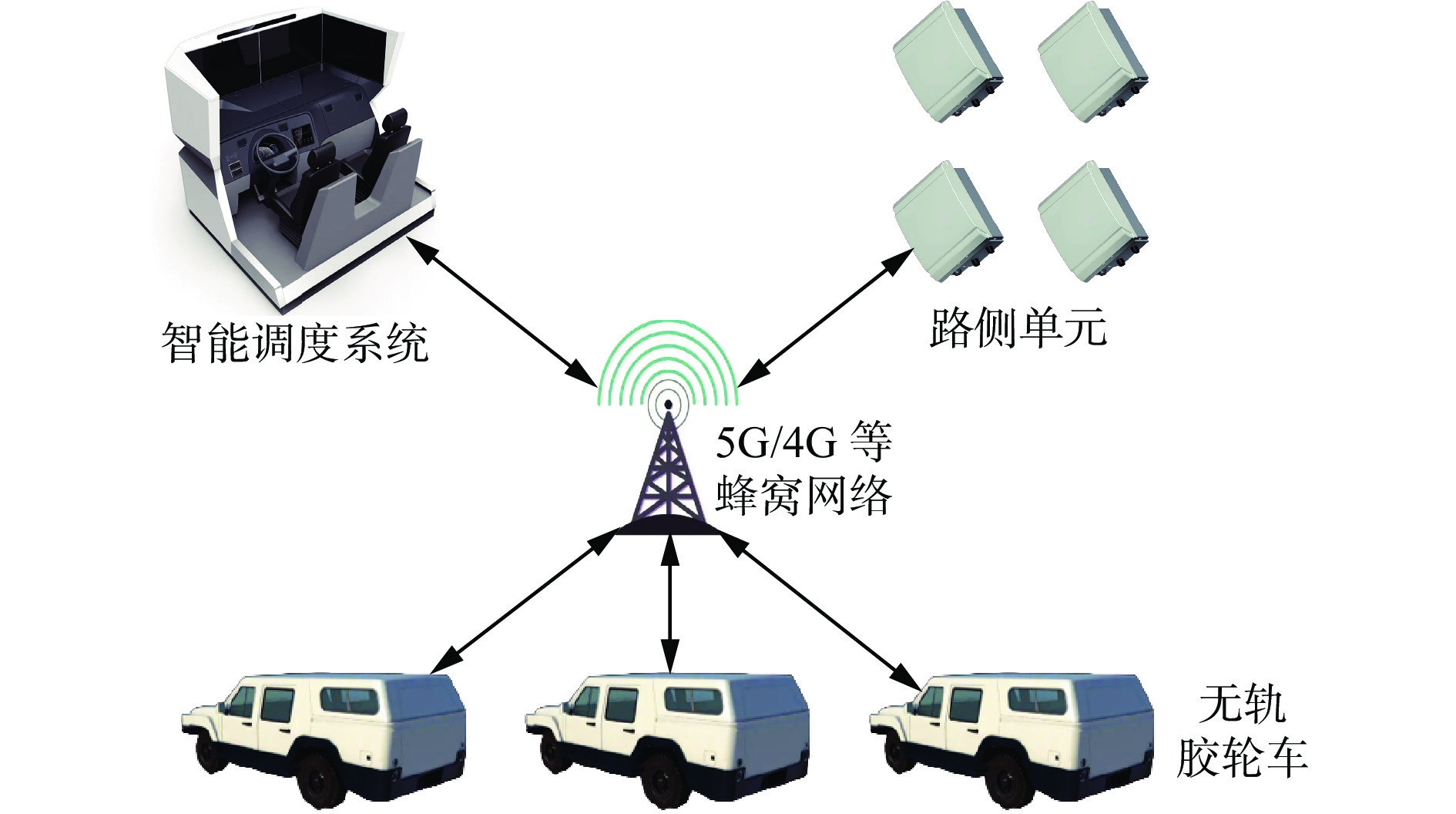
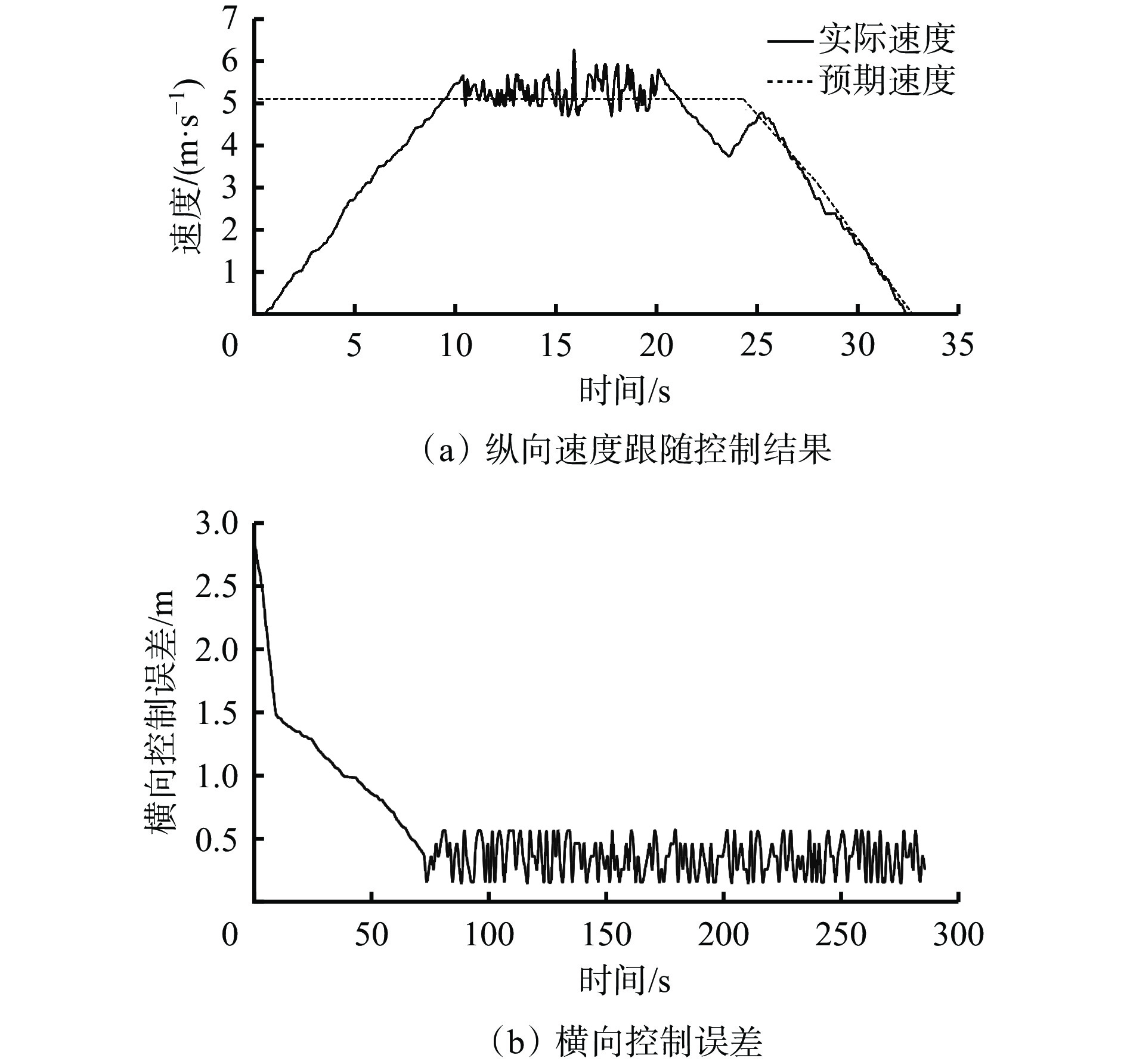
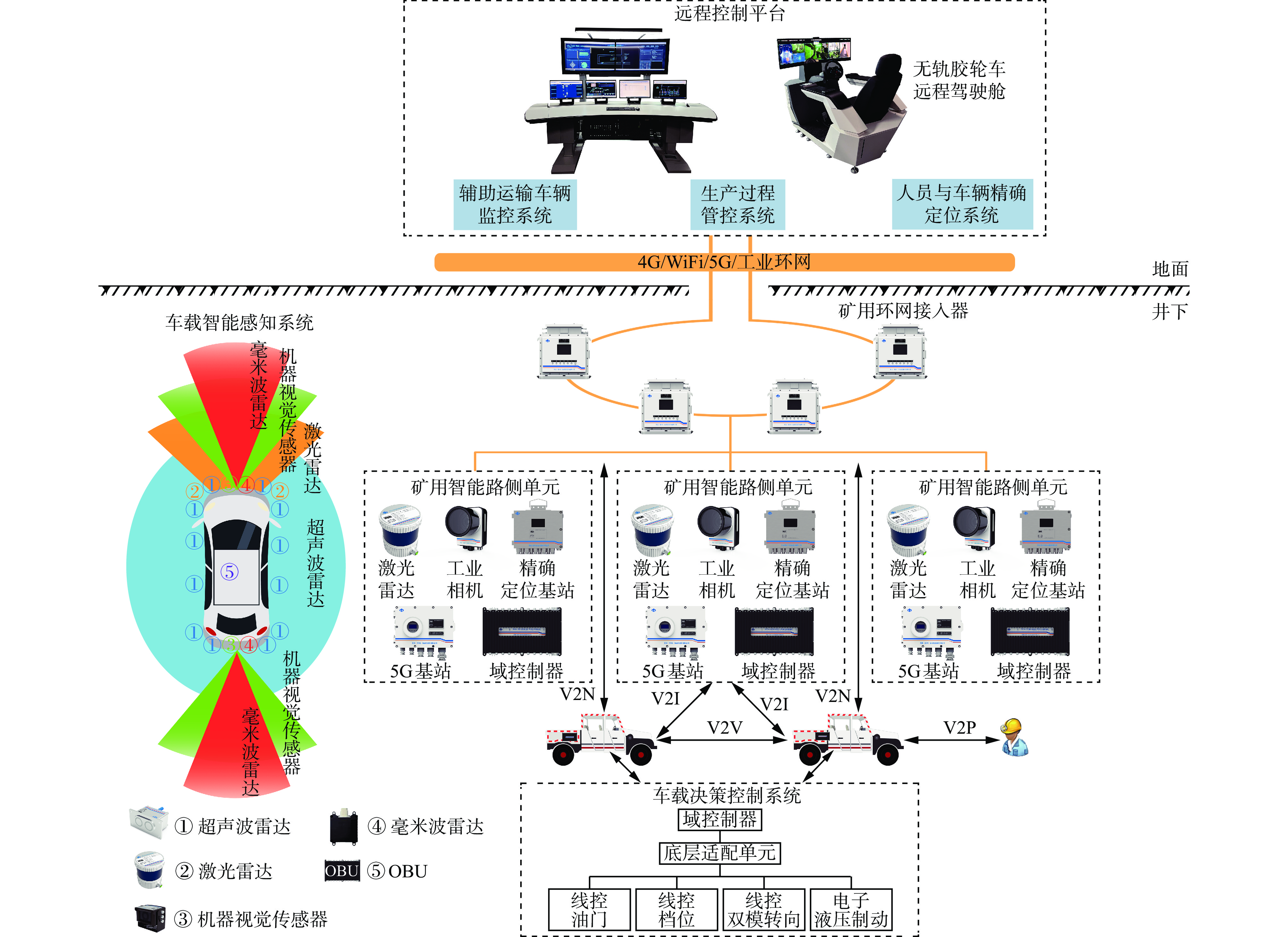
摘要: 煤矿井下无轨胶轮车无人驾驶可大幅减少井下辅助运输作业人员数量,降低人员劳动强度,是辅助运输智能化的主要发展方向之一。相较于地面汽车无人驾驶,煤矿井下无轨胶轮车无人驾驶存在一系列新的挑战:井下巷道“长廊效应”、“多径效应”干扰;狭窄场景内人车混行等复杂路况对车辆精准控制的高要求;井下卫星拒止环境带来的定位问题;井下光照多变且巷道壁阻挡影响机器视觉的应用;设备需满足MA认证;安全措施需多重冗余设计等。针对上述挑战,提出了以车联网为核心的煤矿井下无轨胶轮车无人驾驶系统架构,分析了系统实现的关键技术:利用基于激光同步定位与建图(SLAM)和超宽带(UWB)/惯性导航系统(INS)的组合定位方式,实现车辆高速移动状态下的精确定位;依托车身多传感器(毫米波雷达、激光雷达、超声波雷达、摄像头)、矿用智能路侧单元等识别车身周边路况信息,并通过车联网共享相关信息;利用多源数据采集技术获得环境感知数据、车辆运行数据、路侧监控数据、移动目标数据,海量数据经5G等无线通信网络交互至基于边缘计算的分布式算力单元融合分析后,结合全局和局部路径规划算法合理规划车辆行驶路径,实现仓库管理系统化的车辆智能调度;考虑到井下机电设备安全准入要求,感知、线控、决策控制装备需实现矿用化设计且应尽量采用矿用本安型产品,以满足成本低、体积小、效率高的设计需求;井下无人驾驶车辆需实现感知、决策与控制环节的冗余设计,以实现非正常状况下车辆的安全可靠控制。现场测试结果表明:车辆定位精度可达0.3 m,通信带宽≥50 Mbit/s,数据通信时延≤50 ms,定位精度和数据交互满足井下无人驾驶基本需求;针对T形支巷及U型弯道等典型环境可实现避障及连续路径规划;基于多传感器融合策略,可实现多种目标感知能力提升;车辆动态跟随误差<0.54 m/s,垂直于巷道壁方向平均控制误差<0.2 m,满足无人驾驶车辆的控制要求。Abstract: The unmanned driving of underground trackless rubber-tyred vehicles in coal mine can significantly reduce the number of underground auxiliary transportation operating personnel, and reduce labor intensity. It is one of the leading development directions of intelligent auxiliary transportation. Compared with the unmanned driving of the ground vehicles, there are a series of new challenges for unmanned driving of underground trackless rubber-tyred vehicles. There is the interference of 'corridor effect' and 'multipath effect' in the underground roadway. There are high requirements for precise vehicle control under complex road conditions such as mixed traffic in narrow scenes. The underground satellite refusal environment causes positioning problems. Machine vision application is affected by the changeable illumination underground and the blocking of the roadway wall. The equipment shall meet MA certification. Multiple redundancy design is required for safety measures. In order to solve the above challenges, the architecture of the unmanned driving system for underground trackless rubber-tyred vehicle in coal mine based on the vehicle-to-everything is proposed. And the critical technologies of system implementation are analyzed. The integrated positioning method based on simultaneous localization and mapping (SLAM) and ultra wide band (UWB)/inertial navigation system (INS) is used to realize the precise positioning of the vehicle in the state of high-speed movement. By relying on the multi-sensor (millimeter-wave radar, laser radar, ultrasonic radar, camera) of the vehicle body and mining intelligent roadside unit, the road condition information around the vehicle body is identified. Through the vehicle-to-everything, the relevant information is shared. The multi-source data acquisition technology is used to obtain environmental perception data, vehicle operation data, roadside monitoring data, and mobile target data. The massive data is exchanged through 5G and other wireless communication networks to the distributed computing unit based on edge computing for fusion analysis. The vehicle driving path is reasonably planned in combination with global and local path planning algorithms to realize the systematic vehicle intelligent scheduling of warehouse management. Considering the safety access requirements of underground electromechanical equipment, the perception, wire control and decision-making control equipment shall be designed for mining. The mining intrinsically safe products shall be used as far as possible to meet the design requirements of low cost, small volume and high efficiency. Underground unmanned driving vehicles need to realize the redundant design of perception, decision-making and control links to realize the safe and reliable control of vehicles under abnormal conditions. The field test results show that the vehicle positioning precision can reach 0.3 m. The communication bandwidth is more than or equal to 50 Mbit/s. The data communication delay is less than or equal to 50 ms. Therefore the positioning precision and data exchange can meet the basic requirements of underground unmanned driving vehicles. The obstacle avoidance and continuous path planning can be realized for typical environments such as T-shaped roadway and U-shaped curve. Based on the multi-sensor fusion strategy, the perception capability of multiple targets can be improved. The vehicle dynamic following error is less than 0.54 m/s, and the average control error perpendicular to the roadway wall is less than 0.2 m. These results meet the control requirements of unmanned driving vehicles.
-
0. 引言
地下铝土矿开采环境与煤矿相似[1],借鉴煤矿开采经验,在地下铝土矿中引进综采成套机械设备,是铝土矿高效、安全开采的一条新出路[2]。大部分地下铝土矿的工作面地质赋存条件与煤矿相似,矿体与岩层交界崎岖,直接顶与直接底为岩石,将采矿机应用于地下铝土矿生产时,采矿机滚筒可能因割顶底板的岩类负载,致使滚筒截齿磨损加速,机械损耗增加。在地下开采过程中,工作人员根据经验判断截割负载类型,并通过手持遥控装置或端子调节采矿机滚筒高度,但受限于开采现场的恶劣环境,工作人员的判断往往会出现一定的误差和滞后性。在开采智能化趋势下,采矿机智能化是其中的重要环节,而准确、智能地识别截割负载是实现采矿机智能化的关键技术。
目前,以振动信号为参考的截割负载类型识别方式被广泛应用[3],其识别过程主要包括信号特征提取和模式分类2个部分,其中有效的信号特征提取是截割负载类型识别的基础。采矿机实际运行工况复杂,获得的振动信号具有时域非线性的随机非平稳特征。目前,傅里叶变换、小波变换等时频特征提取方法应用场景广泛。但传统的傅里叶变换不能反映信号在时域上的突变趋势,无法适用于非平稳信号的分解;小波变换在分析信号的高频部分时分辨率较低,易丢失信号的有效特征信息。小波包分解广泛用于处理非平稳信号,信号的有效信息保留全面、分辨率高。郭伟超等[4]利用小波包分解得到表征信号特征的能量谱作为特征向量,并利用主成分分析(Principal Component Analysis,PCA)方法降低特征向量维度,以提取出区分故障类型的有效特征。
在模式分类方面,BP神经网络(Back Propagation Neural Network,BPNN)具备非线性映射、自学习和自适应等能力,但在BPNN训练过程中,算法受反向传播影响,易陷入局部最优解,同时,网络初始化时的权值、阈值选取会直接影响网络收敛速度。麻雀搜索算法(Sparrow Search Algorithm,SSA)是于2020年提出的一种群智能优化算法,通过模拟麻雀的集体觅食行为,优化群体活动以找到全局最优解。孙全等[5]引入SSA对BPNN的初始权值、阈值进行优化,提高了神经网络的训练精度和收敛速度。
因此,本文将小波包分解与SSA−BPNN相结合,基于振动信号对地下铝土矿截割负载类型进行识别。利用小波包分解提取采矿机滚筒空载、截割铝土、截割岩石时的振动信号能量特征,并对特征向量进行降维处理;将特征向量输入至SSA−BPNN,以实现截割负载的分类。
1. 基于小波包分解的信号特征提取
1.1 小波包分解
小波包分解能对小波分解中未分解的高频信号进一步分解到各个频段上,并根据样本数据的特征,自适应选取频段以匹配信号的频谱特征,保留了数据中完整的有效特征[6]。
1.2 特征向量计算
将振动信号x(t)进行n层小波包分解后,得到2n个子频带,则第i(
$ i=\mathrm{0,1},\cdots ,{2}^{n}-1 $ )个子频带的能量为$$ {E}_{{i}}=\sum _{m=0}^{m=N-1}{\left|{f}_{i}\left(m\right)\right|}^{2} $$ (1) 式中
$ {f}_{i}\left(m\right) $ 为x(t)分解后第i个子频带中第m($m=0, 1,\cdots ,N-1,N\mathrm{为}\mathrm{采}\mathrm{样}\mathrm{点}\mathrm{数}$ )个离散采样点的幅值。根据能量守恒定律,将提取的各子频带能量累加求和可得信号总能量
${E}$ ,则各子频带能量在信号总能量的占比为$$ {\beta }_{1}=\frac{1}{{E}}\left\{{E}_{{1}}\right.,{E}_{{2}},\cdots ,\left.{E}_{{i}}\right\} $$ (2) 信号总能量与不同截割负载类型下信号最大能量
$ {E}_{{{\rm{max}}}} $ 的比值为$$ {\beta }_{2}=\frac{{E}}{{E}_{{{\rm{max}}}}} $$ (3) 则表征截割负载状态的2n+1维特征向量为[7]
$$ {{\boldsymbol{\beta}} }=\left\{{\beta }_{1}\right.\text{,}\left.{\beta }_{2}\right\} $$ (4) 1.3 PCA降维
PCA常用于提取高维数据的有效信息及特征。当小波包分解层数过大时,特征向量维度过高,为降低高维数据的稀疏性,利用数据映射方法将高维度、线性相关的数据转换为低维度、线性无关的数据,通过计算数据主成分的累计贡献率,选取最能代表数据有效信息的主成分。
2. SSA−BPNN
在麻雀群体的觅食过程中,麻雀个体分为发现者和加入者2种:发现者负责寻找食物的区域及方向;加入者根据发现者的位置实时调整自己的位置以寻获食物。麻雀种群中的个体在觅食过程中互相监视,加入者与摄入量较多的个体争夺食物。当群体捕食环境出现危险,预警值达到临界点,种群中出现预警者,麻雀种群会迅速反应并进行反捕食[8-12]。
在模式分类过程中,为使BPNN更好、更快地收敛,将BPNN的1组权值、阈值作为麻雀个体,通过寻找麻雀个体的最佳适应度值求得权值、阈值的最优解,并赋值给BPNN。
3. 截割负载类型识别流程
基于小波包分解和SSA−BPNN的截割负载类型识别流程如图1所示,具体步骤如下。
![]() 图 1 基于小波包分解和SSA−BPNN的截割负载类型识别流程Figure 1. Cutting load type identification process based on wavelet packet decomposition and sparrow search algorithm optimized back propagation neural network
图 1 基于小波包分解和SSA−BPNN的截割负载类型识别流程Figure 1. Cutting load type identification process based on wavelet packet decomposition and sparrow search algorithm optimized back propagation neural network(1) 将多组振动信号划分为空载、铝土、岩石负载类型下的数据样本,对样本进行小波包分解后得到各子频带能量,并对其进行归一化得到特征向量,进而对特征向量进行降维处理,并将其作为BPNN的输入。
(2) 确定BPNN的拓扑结构。根据输入的特征向量维度和模式种类,设定BPNN输入层、隐含层、输出层的神经元个数。
(3) 参数初始化。确定SSA最大迭代次数、种群规模、发现者所占种群比例、预警值及预警者数量。
(4) 计算个体适应度值。用种群中的每个个体代表BPNN中的初始权值和阈值,利用适应度函数寻找较小的适应度值以寻找最优解。
(5) 更新麻雀位置。在迭代过程中,将适应度值较好的个体作为发现者;加入者根据发现者搜索到的食物范围进行移动并与发现者抢夺食物资源;预警者在种群中随机产生,比较麻雀个体当前的适应度值与当前全局最优适应度值,并实时更新发现者、加入者和预警者的位置。
(6) 比较位置更新后的个体适应度值,并与当前最优适应度值相比较,达到最大迭代次数后选择全局最优解[13]。
(7) 利用最优解初始化BPNN并进行训练。
(8) 使用训练后的SSA−BPNN进行截割负载分类。
4. 试验验证
4.1 工程地质条件
贵州某铝土矿矿体赋存条件良好,矿层厚度变化大,主体矿层厚度为1.3~3.5 m,矿料坚固性系数变化范围大,铝土坚固性系数为2~5,岩石坚固性系数达6~8,地质赋存情况见表1。参照煤矿开采经验,该矿引入综合机械化开采技术,配备MG500/1170−AWD1采矿机。采矿机滚筒空载、截割铝土和岩石时产生的振动信号存在明显差异,因此,基于振动信号判断采矿机截割负载类型。
表 1 工作面地质赋存Table 1. Geological occurrence of working face层位 岩性 岩性描述 基本顶 灰岩 灰色薄−中厚层状细晶灰岩,夹灰−深灰色薄−中厚层状含泥质灰岩和灰黑色薄层含生物碎屑泥灰岩,含线状、脉状灰白色方解石 直接顶 泥岩、泥质灰岩、
白云质灰岩灰−深灰色薄中厚层状含泥质灰岩,夹杂生物碎屑灰岩,含线状灰白色方解石 伪顶 炭质泥岩、铝土岩 深灰色、黑色炭质泥岩,灰绿色致密铝土岩 矿体 铝土矿 灰白色、浅黄灰色碎屑状、豆状、半土状铝土矿,含少量星点状细粒黄铁矿 直接底 铝土岩、
铝土质泥岩深灰绿色致密铝土岩、深灰−灰黑色薄−中厚层状含炭质泥,含团块状细−中粒黄铁矿 基本底 泥(页)岩 灰白色中厚层灰岩夹灰绿色薄层绿泥石岩、紫红色夹灰绿色薄层泥岩、浅紫红色片状薄层页岩 4.2 传感器及测点选择
由于生产环境中采矿机摇臂预留螺孔堵塞、生锈,利用转接板将传感器固定于采矿机的方法不便实施,所以在试验过程中选用便于安装拆卸的磁吸式方法安装传感器。采用1A314E型三向压电式加速度传感器,参数见表2(g为重力加速度)。
表 2 传感器参数Table 2. 2 Sensor parameters指标 值 轴向灵敏度/(mV·g−1) 100 工作温度/℃ −40~+120 冲击极限/g 2 000 频率范围/Hz 0.5~7 000 将磁吸式加速度传感器安装于摇臂传动系统的一轴、三轴、五轴、七轴处(图2),采样频率设置为10 kHz,对摇臂进行加载试验(图3),采集加载过程中的振动信号。摇臂加载试验过程中,通过调节电流大小改变扭矩,并逐渐增加扭矩完成加载过程,加载试验分为空载、加载50%、加载75%、满载4个阶段,各阶段内载荷恒定,每种工况下采集振动信号60 s。
选用均方根和峭度2个指标从时域特征上分析摇臂不同工况下的振动信号。均方根反映振动信号的振幅大小;峭度表征振动信号中冲击信号的多少,峭度值越偏离3,代表信号受冲击激励影响越大。各工况下,一轴、三轴、五轴、七轴处振动信号的均方根和峭度分别如图4、图5所示。由图4可知,一轴处振动信号的均方根随着负载的升高上升趋势最明显,表明一轴处传感器对负载的变化最为敏感。由图5可知,一轴处振动信号峭度值偏离3的程度最小,表明一轴处振动信号受冲击振动影响最小。因此在后续工业性试验中选用摇臂一轴作为传感器安装位置。
![]() 图 4 不同工况下各轴振动信号的均方根Figure 4. Root mean square of vibration signal of each shaft under different working conditions
图 4 不同工况下各轴振动信号的均方根Figure 4. Root mean square of vibration signal of each shaft under different working conditions![]() 图 5 不同工况下各轴振动信号的峭度Figure 5. Kurtosis of vibration signal of each shaft under different working conditions
图 5 不同工况下各轴振动信号的峭度Figure 5. Kurtosis of vibration signal of each shaft under different working conditions4.3 工业性试验方案
在工业性试验过程中,为保证传感器的可靠性,将传感器吸附于摇臂一轴靠近支架侧的壳体处,如图6所示。采集空载、截割铝土、截割岩石3种工况对应的振动信号[14-15]。在信号采集过程中,由专人跟随采矿机,实时观测滚筒位置,通过防爆手机、传感器与电控箱中的标准时间,将采矿机滚筒位置等基本信息与振动信号进行同步关联记录与保存。
4.4 特征向量提取及数据降维
采集采矿机滚筒空载、截割铝土和岩石3种不同工况下的振动信号各40 s,采样频率为10 kHz,此时,每种工况下振动信号数据点为400 000个,单个样本长度取400个数据点,则每种工况下振动信号数据点可划分为1 000个样本。
(1) 特征向量提取。选取bior3.3小波基函数,对各样本进行3层小波包分解,得到8个子频带能量及信号总能量,并利用离差标准化将数据映射至[0,1],实现数据归一化,如图7所示。可看出不同负载下信号在各子频带上的能量表现出一定的差异性,表明经小波包分解后得到的能量特征可以作为区分不同负载类型的特征向量。
小波包能量特征向量见表3。
表 3 小波包能量特征向量Table 3. 3 Wavelet packet energy feature vectors序号 特征向量 1 [0.275 2 0.340 7 0.101 8 0.440 6 0.119 3 0.081 8
0.018 4 0.018 3 0.890 3]2 [0.316 7 0.339 3 0.107 6 0.049 4 0.095 0 0.061 8
0.012 7 0.017 5 0.886 2]3 [0.282 6 0.332 4 0.092 2 0.045 7 0.109 6 0.094 4
0.021 5 0.021 6 0.877 9] 3 000 [0.444 5 0.252 0 0.084 2 0.707 0 0.072 6 0.043 7
0.016 2 0.016 1 0.440 1](2) 数据降维。利用PCA方法对数据进行降维,各主成分贡献率如图8所示。可看出第一、第二、第三主成分已获得累计贡献率98.7%,因此可将9维特征向量降至3维。
4.5 BPNN及SSA的参数初始化
(1) BPNN参数设置。由于降维后的特征向量为3维,设定输入层神经元个数u=3。[1 0 0]、[0 1 0]、[0 0 1]分别代表空载、铝土、岩石3种负载,设定输出层神经元个数v=3。根据经验公式可得隐含层神经元个数:
$$ l=\sqrt{u+v}+a $$ (5) 式中a为常量,取值范围为(0,10)。
通过试算法可知,取l=11时,神经网络准确性最高,因此BPNN的拓扑结构为3−11−3。
(2) SSA参数初始化。通过试算法,取最大迭代次数为30、种群规模为20,设置发现者所占种群比例为0.2,预警值为0.8,预警者数量为2。
4.6 结果分析
将特征向量作为BPNN和SSA−BPNN的输入分别进行训练,以均方误差为指标评估2种训练方案的性能,如图9所示。可看出BPNN在124次迭代时达到收敛,SSA−BPNN在91次迭代时收敛;与BPNN相比,SSA−BPNN收敛速度更快、均方误差更小。
取总样本的10%作为测试集分别代入训练好的BPNN和SSA−BPNN 2种神经网络中进行负载分类,结果如图10所示(空载时的样本编号为1—100,设为标签0;截割负载为铝土时的样本编号为101—200,设为标签1;截割负载为岩石时的样本编号为201—300,设为标签2)。可看出BPNN的识别准确率为91.7%,SSA−BPNN的识别准确率为95.3%,经SSA优化后的BPNN的识别准确率较BPNN有所提升。
5. 结论
(1) 基于小波包分解提取采矿机摇臂振动信号的能量特征,不同负载下振动信号的小波包能量特征在各频率尺度下存在差异。
(2) 利用SSA优化BPNN的初始权值和阈值,加快了神经网络的收敛速度。
(3) 经小波包分解后得到的能量特征作为特征向量输入SSA−BPNN,实现了空载、铝土与岩石负载的分类,提高了负载类型识别准确率,达95.3%。
-
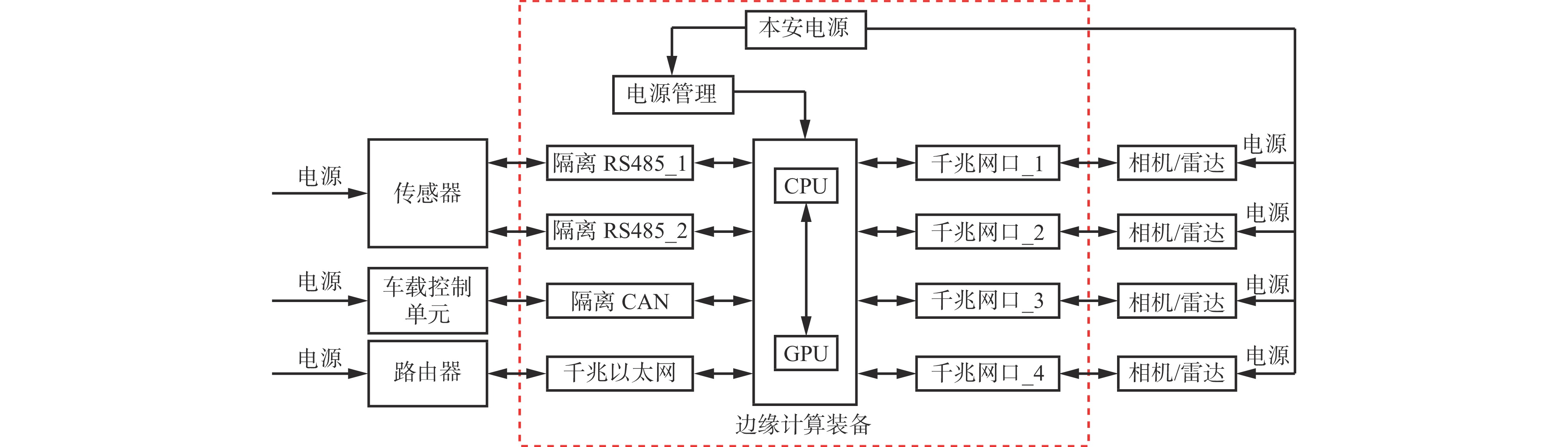
![]()
图 1 煤矿井下无轨胶轮车无人驾驶系统架构
Figure 1. Unmanned driving system architecture of trackless rubber-tyred vehicle in underground coal mine
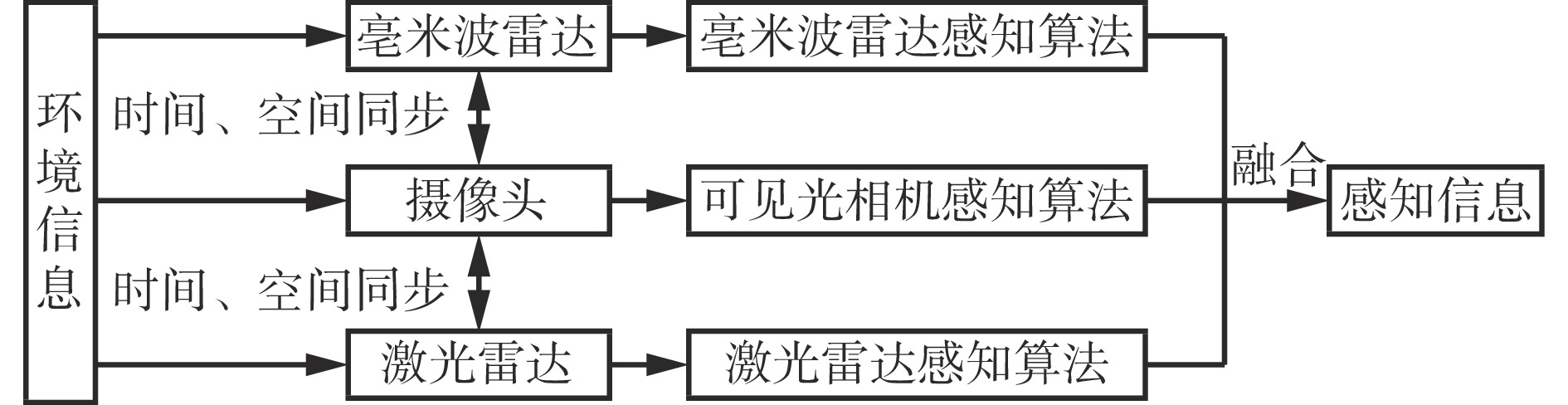
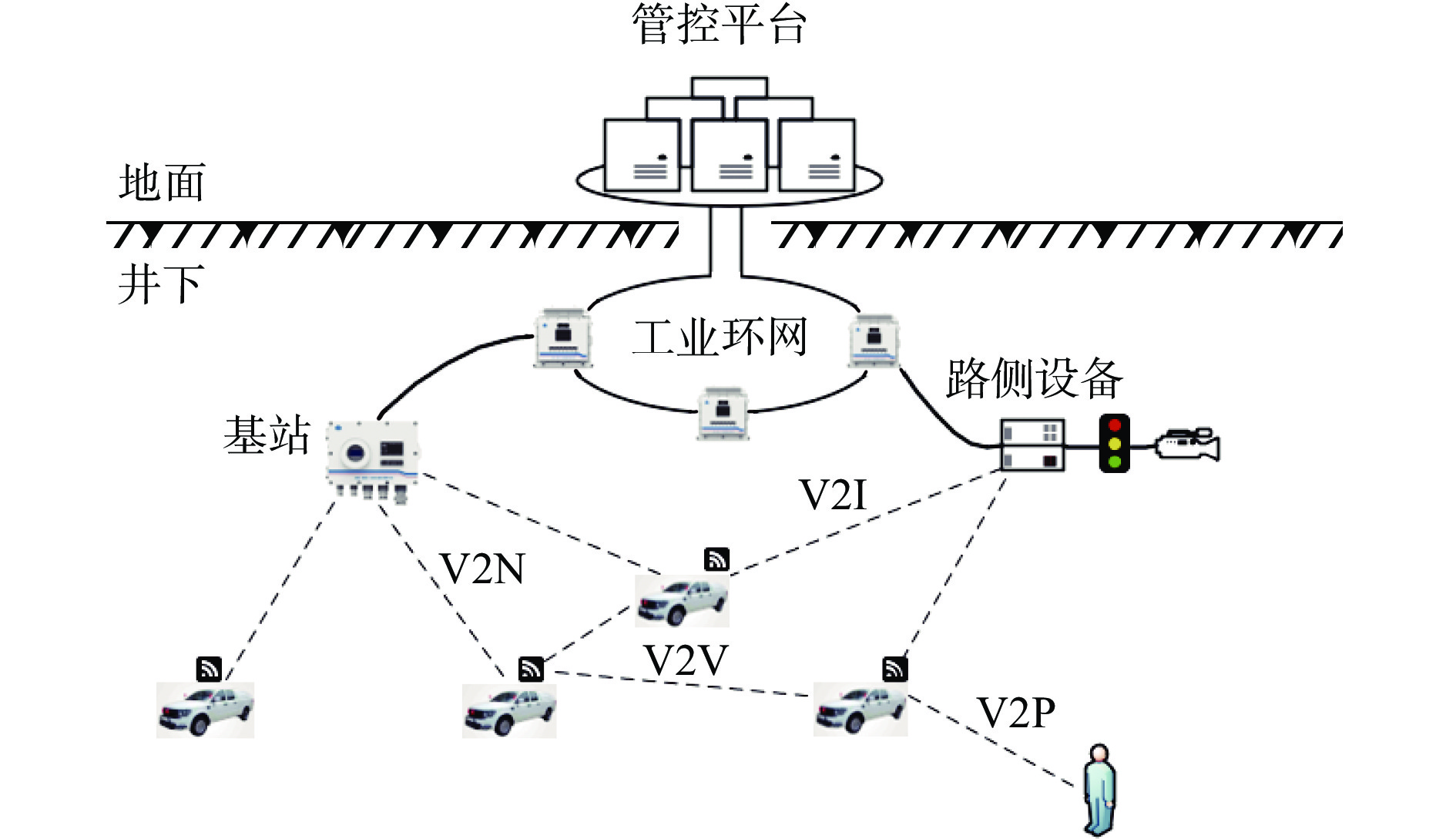
![]()
图 2 基于多传感器融合的井下车辆路况识别
Figure 2. Road condition recognition of underground vehicle based on multi-sensor fusion
![]()
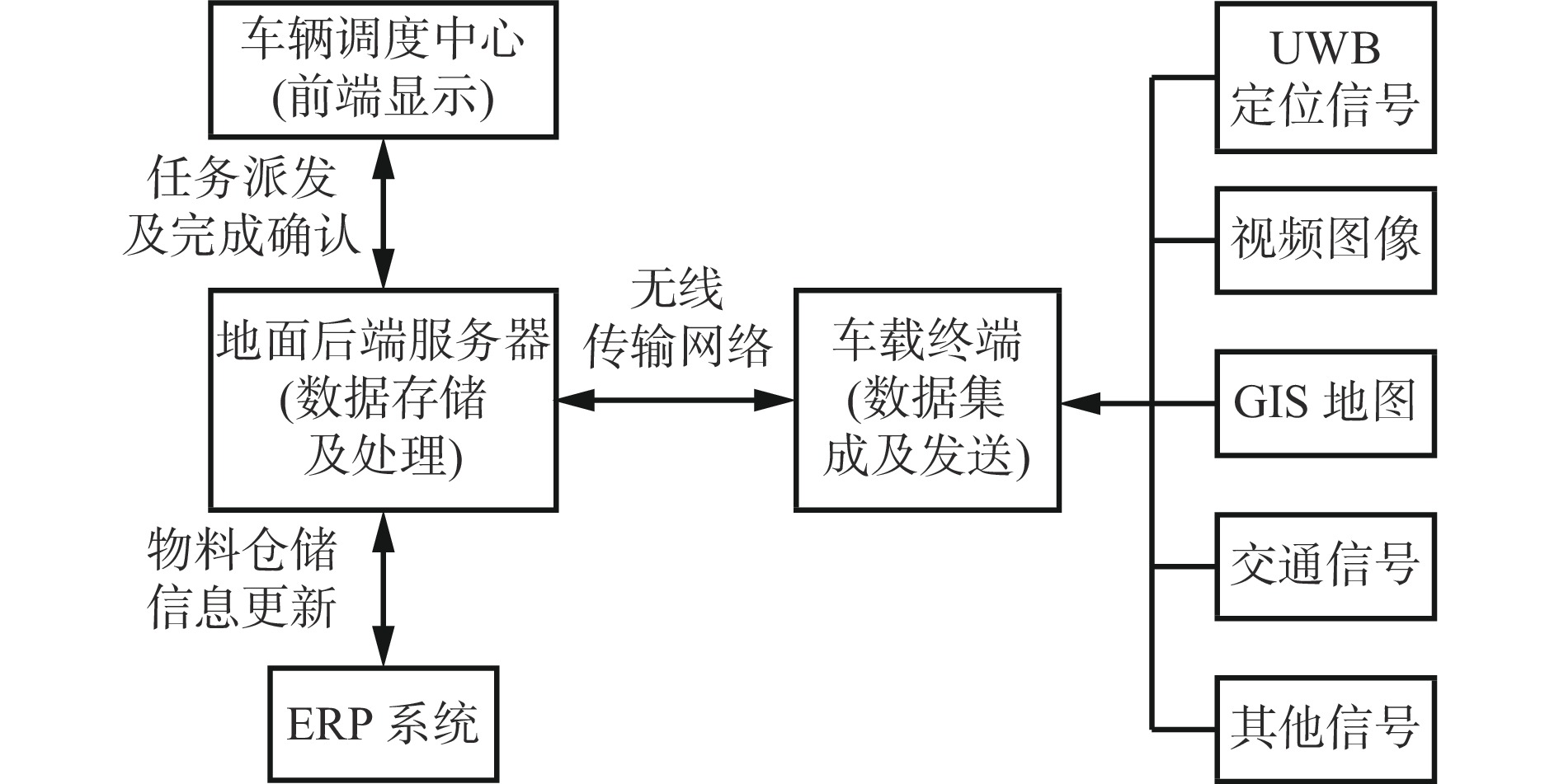
图 5 井下车辆智能调度工作机制
Figure 5. Working mechanism of intelligent dispatching of underground vehicle
![]()
图 6 矿用本安型高性能边缘计算装备电气原理
Figure 6. Electrical principle of mine intrinsically safe high-performance edge computing equipment
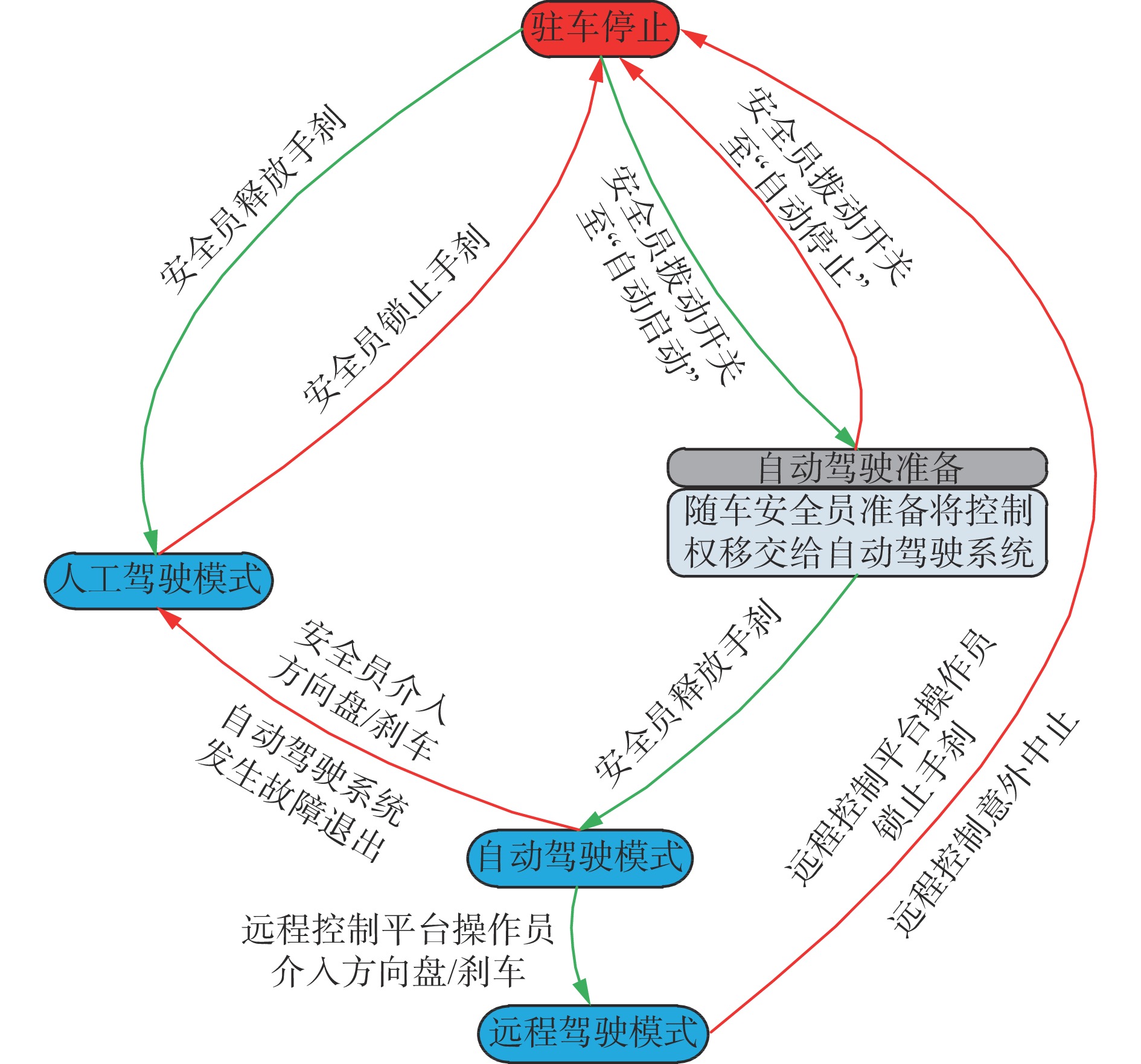
![]()
图 8 井下无人驾驶无轨胶轮车的权限管控及运转流程
Figure 8. Authorization control and operation process of underground unmanned driving trackless rubber-tyred vehicle
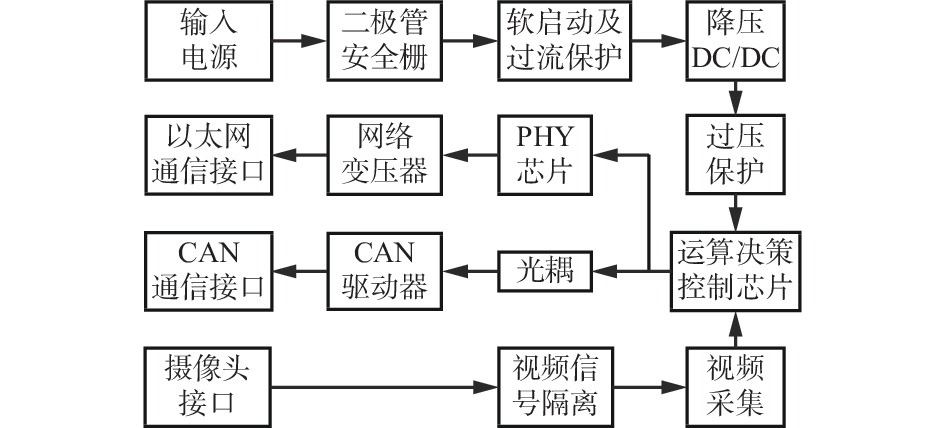
![]()
图 9 决策控制主机本安化设计方案
Figure 9. Intrinsically safety design scheme of decision control host
![]()
图 13 基于不同传感器的目标障碍物检测结果
Figure 13. Detection results of target obstacle by different sensors
![]()
图 14 无人驾驶车辆横纵向控制测试结果
Figure 14. Test results of lateral and longitudinal control of unmanned driving vehicle
表 1 室内定位技术对比
Table 1 Comparison of indoor positioning technologies
技术 精度/m 能耗 传输距离/m 抗干扰能力 优点 缺点 蓝牙 3.0 低 100 较弱 功耗低,穿透力较强 抗干扰能力较弱,定位精度较差 UWB 0.3 较低 250 强 抗干扰能力强,定位精度较高 需额外设备,部署较难 RFID 1.0~5.0 低 5 弱 功耗低,数据传输速率高 无法连续定位,定位精度差 ZigBee 3.0 较低 75 弱 成本及功耗较低 定位精度较差,抗干扰能力较弱 WiFi 5.0 较低 50 较弱 成本低,方便部署 定位精度差 激光 0.1 高 300 强 定位精度高,抗干扰能力强 功耗大,只可在可视范围内测距 超声波 1.0 较低 10 强 功耗较低,抗干扰能力强 有效定位距离短,部署难  下载: 导出CSV
下载: 导出CSV
表 2 常用路径规划算法优缺点及适用环境
Table 2 Advantages, disadvantages and applicable environments of common path planning algorithms
算法 优点 缺点 适用环境 Dijkstra算法 使用贪心策略选择最优节点,能获得最优路径 运算过程中会占用大量计算资源,规划效率较低 环境信息已知的全局路径规划 A*算法 通过启发式采样方式搜索节点,算法搜索效率高 对地图要求较高,无法保证得到最优解 环境信息已知的全局路径规划 快速搜索随机树算法 通过随机采样搜索节点,适用于非完整约束场合 生成路径非最优,且规划效率低 环境信息已知的全局路径规划 人工势场法 能够实时避障,生成的路径平滑、安全 障碍物较多时容易陷入局部最优,造成目标不可达 既可用于全局路径规划,也可用于
局部路径规划动态窗口法 能够考虑无人驾驶车辆的速度与运动学约束,生成的路径平滑 存在局部最优解,且在复杂环境下计算复杂度高 环境信息部分已知的局部路径规划 蚁群算法 容易与其他启发式算法结合,能寻找到全局最优解 搜索具有盲目性,容易陷入局部最优 环境信息部分已知的局部路径规划
下载: 导出CSV
表 3 C−V2X通信时延及带宽
Table 3 Communication delay and bandwidth of C−V2X
交互模式 通信时延/ms 通信带宽/(Mbit${\boldsymbol{\cdot}} $s−1) V2N 上行 30~50 150~200 下行 20~30 50~100 V2I 上行 10~20 100~150 下行 5~15 50~80
下载: 导出CSV
表 4 井下目标障碍物感知统计结果
Table 4 Statistical results of underground target obstacles perception
目标类型 目标个数 准确率/% 毫米波
雷达激光
雷达摄像头 多传感器融合 大目标 390 96.3 95.9 93.7 98.9 中目标 350 94.2 91.2 93.2 98.6 小目标 300 86.5 83.5 89.9 96.5 极小目标 100 81.9 78.4 88.5 94.8
下载: 导出CSV
-
[1] 王国法. 煤矿智能化最新技术进展与问题探讨[J]. 煤炭科学技术,2022,50(1):1-27. WANG Guofa. New technological progress of coal mine intelligence and its problems[J]. Coal Science and Technology,2022,50(1):1-27.
[2] 倪兴华. 安全高效矿井辅助运输关键技术研究与应用[J]. 煤炭学报,2010,35(11):1909-1915. DOI: 10.13225/j.cnki.jccs.2010.11.027 NI Xinghua. Research and application of key technology for safety and high efficient mine auxiliary transportation[J]. Journal of China Coal Society,2010,35(11):1909-1915. DOI: 10.13225/j.cnki.jccs.2010.11.027
[3] 游小荣,裴浩,霍振龙. 一种基于UWB的三边定位改进算法[J]. 工矿自动化,2019,45(11):19-23. DOI: 10.13272/j.issn.1671-251x.2019050081 YOU Xiaorong,PEI Hao,HUO Zhenlong. An improved trilateral positioning algorithm based on UWB[J]. Industry and Mine Automation,2019,45(11):19-23. DOI: 10.13272/j.issn.1671-251x.2019050081
[4] GITHINJI L. Effect of biochar application rate on soil physical and hydraulic properties of a sandy loam[J]. Archives of Agronomy and Soil Science,2014,60(4):457-470. DOI: 10.1080/03650340.2013.821698
[5] SHAN Tixiao, ENGLOT B. LeGO-LOAM: lightweight and ground-optimized lidar odometry and mapping on variable terrain[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, 2019: 4758-4765.
[6] ASSEM I,DUPONT G. Friezes and a construction of the Euclidean cluster variables[J]. Journal of Pure and Applied Algebra,2011,215(10):2322-2340. DOI: 10.1016/j.jpaa.2010.12.013
[7] LIU Yongfan,DU Sen,KONG Youyong. Supervoxel clustering with a novel 3D descriptor for brain tissue segmentation[J]. International Journal of Machine Learning and Computing,2020,10(3):501-506. DOI: 10.18178/ijmlc.2020.10.3.964
[8] CHEN Yizhou,SHEN Shifei,CHEN Tao,et al. Path optimization study for vehicles evacuation based on Dijkstra algorithm[J]. Procedia Engineering,2014,71:159-165. DOI: 10.1016/j.proeng.2014.04.023
[9] 鲍久圣,张牧野,葛世荣,等. 基于改进A*和人工势场算法的无轨胶轮车井下无人驾驶路径规划[J]. 煤炭学报,2022,47(3):1347-1360. DOI: 10.13225/j.cnki.jccs.xr21.1716 BAO Jiusheng,ZHANG Muye,GE Shirong,et al. Underground driverless path planning of trackless rubber tyred vehicle based on improved A* and artificial potential field algorithm[J]. Journal of China Coal Society,2022,47(3):1347-1360. DOI: 10.13225/j.cnki.jccs.xr21.1716
[10] ZHANG Zhenghao,QIAO Bing,ZHAO Wentong,et al. A predictive path planning algorithm for mobile robot in dynamic environments based on rapidly exploring random tree[J]. Arabian Journal for Science and Engineering,2021,46(9):8223-8232. DOI: 10.1007/s13369-021-05443-8
[11] 田子建,高学浩,张梦霞. 基于改进人工势场的矿井导航装置路径规划[J]. 煤炭学报,2016,41(增刊2):589-597. DOI: 10.13225/j.cnki.jccs.2016.1165 TIAN Zijian,GAO Xuehao,ZHANG Mengxia. Path planning based on the improved artificial potential field of coal mine dynamic target navigation[J]. Journal of China Coal Society,2016,41(S2):589-597. DOI: 10.13225/j.cnki.jccs.2016.1165
[12] 袁晓明,郝明锐. 煤矿无轨辅助运输无人驾驶关键技术与发展趋势研究[J]. 智能矿山,2020,1(1):89-97. YUAN Xiaoming,HAO Mingrui. Key technology and development trend of mine auxiliary transport autonomous vehicle[J]. Journal of Intelligent Mine,2020,1(1):89-97.
[13] 谭玉新,杨维,徐子睿. 面向煤矿井下局部复杂空间的机器人三维路径规划方法[J]. 煤炭学报,2017,42(6):1634-1642. DOI: 10.13225/j.cnki.jccs.2016.1047 TAN Yuxin,YANG Wei,XU Zirui. Three-dimensional path planning method for robot in underground local complex space[J]. Journal of China Coal Society,2017,42(6):1634-1642. DOI: 10.13225/j.cnki.jccs.2016.1047
[14] LIU Jianhua,YANG Jianguo,LIU Huaping,et al. An improved ant colony algorithm for robot path planning[J]. Soft Computing,2017,21(19):5829-5839. DOI: 10.1007/s00500-016-2161-7
[15] 张朝阳. 矿用无轨胶轮车无人驾驶系统研究[D]. 西安: 西安科技大学, 2016. ZHANG Chaoyang. Research on unmanned system for mine trackless rubber wheel vehicle[D]. Xi'an: Xi'an University of Science and Technology, 2016.
[16] 周晶晶, 苏致远, 马育林, 等. 基于多传感器的智能车交通状态感知关键技术研究[C]//第11届中国智能交通年会大会, 重庆, 2016: 688-692. ZHOU Jingjing, SU Zhiyuan, MA Yulin, et al. Research on key technology of intelligent vehicle traffic state perception based on multi-sensor[C]//The 11th China Intelligent Transportation Annual Conference, Chongqing, 2016: 688-692.
[17] 任大凯,廖振松. 5G车路协同自动驾驶应用研究[J]. 电信工程技术与标准化,2020,33(9):68-74. DOI: 10.3969/j.issn.1008-5599.2020.09.014 REN Dakai,LIAO Zhensong. Research on application of 5G-V2X autonomous driving[J]. Telecom Engineering Technics and Standardization,2020,33(9):68-74. DOI: 10.3969/j.issn.1008-5599.2020.09.014
[18] 王斌. 煤矿无轨辅助运输设备的应用与发展趋势[J]. 煤矿机械,2013,34(8):1-3. DOI: 10.13436/j.mkjx.2013.08.117 WANG Bin. Application and development of coal mine trackless auxiliary transportation equipment[J]. Coal Mine Machinery,2013,34(8):1-3. DOI: 10.13436/j.mkjx.2013.08.117
[19] 刘宏杰,张慧,张喜麟,等. 煤矿无轨胶轮车智能调度管理技术研究与应用[J]. 煤炭科学技术,2019,47(3):81-86. DOI: 10.13199/j.cnki.cst.2019.03.011 LIU Hongjie,ZHANG Hui,ZHANG Xilin,et al. Research and application of intelligent dispatching and management technology for coal mine trackless rubber-tyred vehicle[J]. Coal Science and Technology,2019,47(3):81-86. DOI: 10.13199/j.cnki.cst.2019.03.011
[20] 李建明. 梅花井煤矿辅助运输系统选择及应用研究[J]. 煤炭科技,2014,35(3):1-2. DOI: 10.3969/j.issn.1008-3731.2014.03.002 LI Jianming. Research on selection and application of auxiliary transportation system in Meihuajing Coal Mine[J]. Coal Science & Technology Magazine,2014,35(3):1-2. DOI: 10.3969/j.issn.1008-3731.2014.03.002
[21] 吴建波,朱文霞,剧亮,等. 边缘计算在智慧交通系统中的应用[J]. 计算机与现代化,2021(12):103-109,122. DOI: 10.3969/j.issn.1006-2475.2021.12.017 WU Jianbo,ZHU Wenxia,JU Liang,et al. Application of edge computing in intelligent transportation systems[J]. Computer and Modernization,2021(12):103-109,122. DOI: 10.3969/j.issn.1006-2475.2021.12.017
[22] 陈霄,刘巍,陈静,等. 边缘计算环境下的计算卸载策略研究[J]. 火力与指挥控制,2022,47(1):7-14,19. DOI: 10.3969/j.issn.1002-0640.2022.01.002 CHEN Xiao,LIU Wei,CHEN Jing,et al. Research on computing offload strategy in edge computing environment[J]. Fire Control & Command Control,2022,47(1):7-14,19. DOI: 10.3969/j.issn.1002-0640.2022.01.002
[23] 杨晓丹. 煤矿井下防爆电气设备中的应用技术[J]. 电子技术与软件工程,2019(24):223-224. YANG Xiaodan. Application technology of explosion-proof electrical equipment in coal mine[J]. Electronic Technology & Software Engineering,2019(24):223-224.
[24] 陈山枝,时岩,胡金玲. 蜂窝车联网(C−V2X)综述[J]. 中国科学基金,2020,34(2):179-185. DOI: 10.16262/j.cnki.1000-8217.2020.02.009 CHEN Shanzhi,SHI Yan,HU Jinling. Cellular vehicle to everything(C-V2X):a review[J]. Bulletin of National Natural Science Foundation of China,2020,34(2):179-185. DOI: 10.16262/j.cnki.1000-8217.2020.02.009
[25] 陈山枝,葛雨明,时岩. 蜂窝车联网(C−V2X)技术发展、应用及展望[J]. 电信科学,2022,38(1):1-12. CHEN Shanzhi,GE Yuming,SHI Yan. Technology development,application and prospect of cellular vehicle-to-everything(C-V2X)[J]. Telecommunications Science,2022,38(1):1-12.
[26] 阎俊豪,贾宗璞,李东印. 智能矿山车联网体系架构与关键技术[J]. 煤炭科学技术,2020,48(7):249-254. DOI: 10.13199/j.cnki.cst.2020.07.026 YAN Junhao,JIA Zongpu,LI Dongyin. Architecture and key technologies of intelligent of vehicles in intelligent mine[J]. Coal Science and Technology,2020,48(7):249-254. DOI: 10.13199/j.cnki.cst.2020.07.026
[27] 韩江洪,卫星,陆阳,等. 煤矿井下机车无人驾驶系统关键技术[J]. 煤炭学报,2020,45(6):2104-2115. DOI: 10.13225/j.cnki.jccs.ZN20.0343 HAN Jianghong,WEI Xing,LU Yang,et al. Driverless technology of underground locomotive in coal mine[J]. Journal of China Coal Society,2020,45(6):2104-2115. DOI: 10.13225/j.cnki.jccs.ZN20.0343
[28] 闫凌,黄佳德. 矿用卡车无人驾驶系统研究[J]. 工矿自动化,2021,47(4):19-29. DOI: 10.13272/j.issn.1671-251x.17729 YAN Ling,HUANG Jiade. Research on unmanned driving system of mine-used truck[J]. Industry and Mine Automation,2021,47(4):19-29. DOI: 10.13272/j.issn.1671-251x.17729
[29] 于月森,谢冬莹,李世光,等. 本质安全电路技术综述[J]. 煤炭科学技术,2011,39(6):61-65. DOI: 10.13199/j.cst.2011.06.67.yuys.025 YU Yuesen,XIE Dongying,LI Shiguang,et al. Summary of intrinsic safety electric circuit technology[J]. Coal Science and Technology,2011,39(6):61-65. DOI: 10.13199/j.cst.2011.06.67.yuys.025
[30] 林引. 矿用高可靠性本安型传感器电源电路设计与实现[J]. 煤炭科学技术,2013,41(6):88-91. LIN Yin. Design and realization on power of high reliable intrinsic safe sensor[J]. Coal Science and Technology,2013,41(6):88-91.
[31] 王璇. 矿用本安型网口电路设计[J]. 煤矿安全,2016,47(6):113-114,118. DOI: 10.13347/j.cnki.mkaq.2016.06.031 WANG Xuan. Design of mine-used intrinsic safe network interface circuit[J]. Safety in Coal Mines,2016,47(6):113-114,118. DOI: 10.13347/j.cnki.mkaq.2016.06.031
-
其他相关附件




















计量
- 文章访问数: 1499
- HTML全文浏览量: 116
- PDF下载量: 180
