
Research on the network connected automatic driving technology in underground coal mine
-
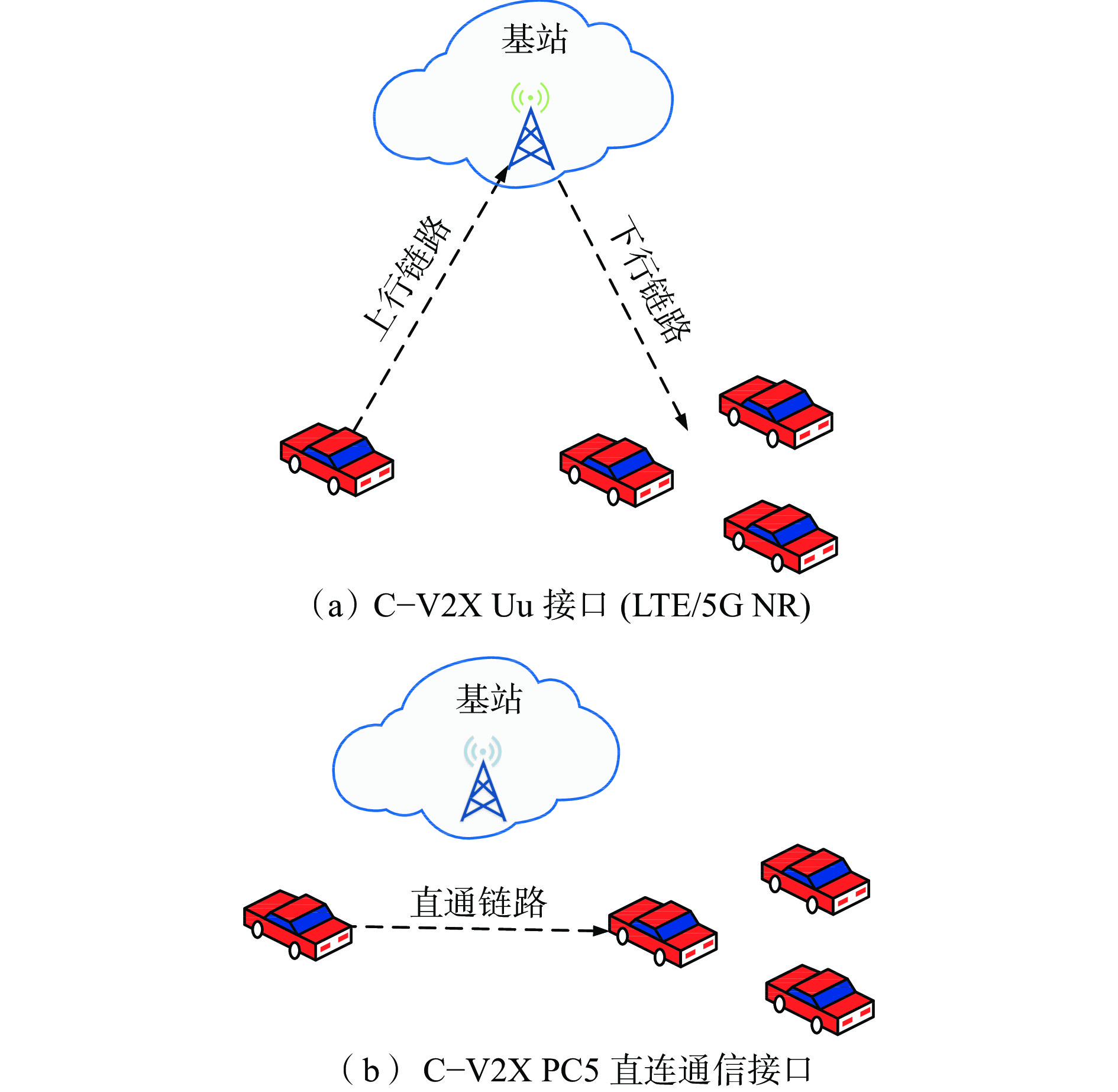
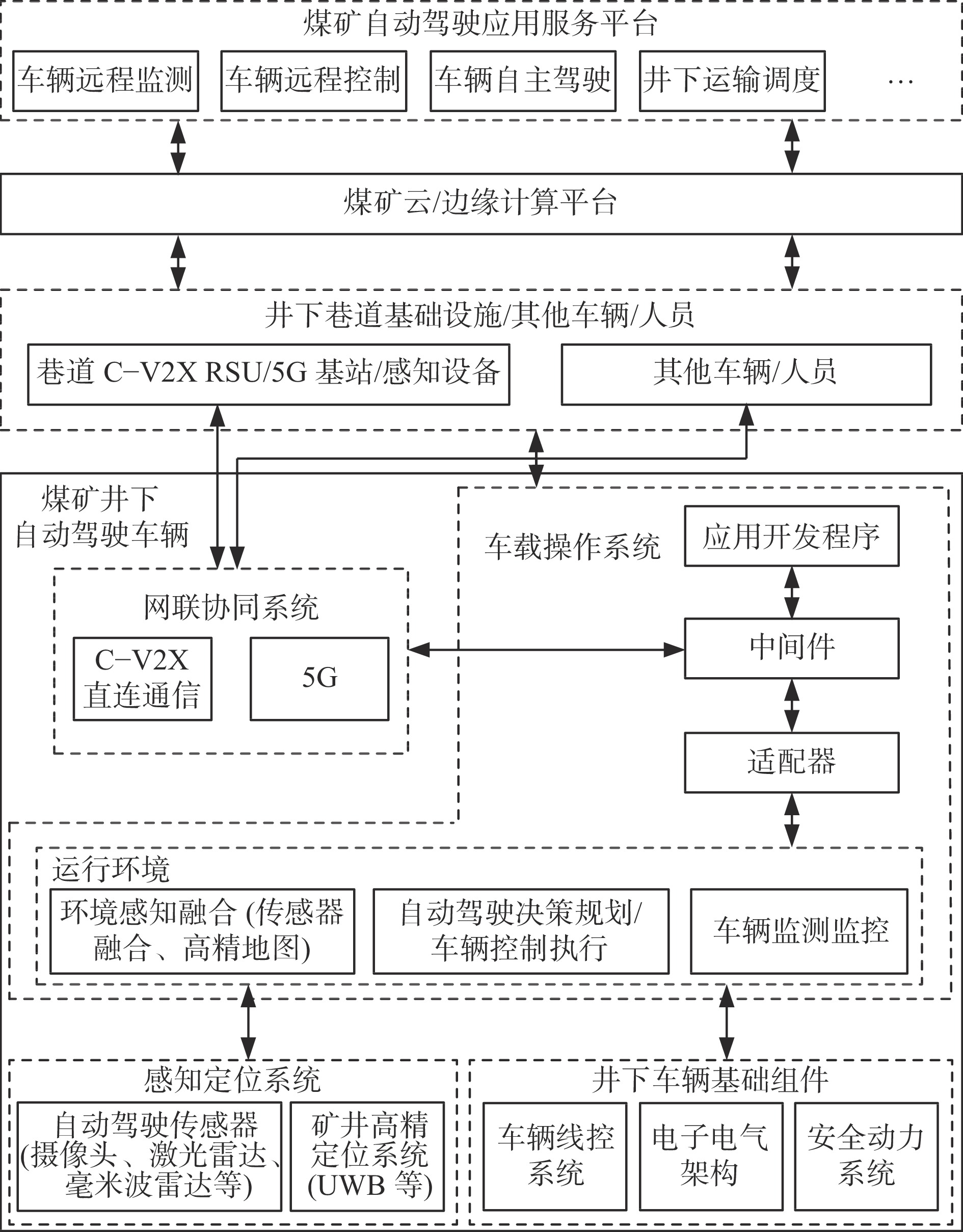
摘要: 通过分析地面常规自动驾驶智能化和网联化技术发展现状及技术特点,结合煤矿井下无GNSS(全球卫星导航系统)信号覆盖、巷道照度低、遮挡物与障碍物较多、煤尘粉尘普遍存在的环境特点,提出了煤矿井下开展自动驾驶研究的关键技术,即无GNSS的移动高精定位技术、激光雷达技术、基于毫米波雷达的井下障碍物检测技术、井下低照度视频实时增强和特征匹配技术、井下环境高精地图技术、井下自动驾驶车辆决策规划技术、井下自动驾驶车辆控制执行技术、井下5G通信技术、C−V2X直连通信技术等;指出煤矿井下开展自动驾驶应用具有少人化/无人化需求显著、运营管理主体明确、场景封闭、路线固定、车速较慢、渗透率可控、5G建设基础较好、接口易开放等优势。构建了包括井下自动驾驶车辆、巷道基础设施、人员、煤矿云/边缘计算平台及煤矿自动驾驶应用服务平台的“人−车−巷−云”煤矿井下网联式自动驾驶系统参考架构,设计了包括感知定位系统、网联协同系统、车载操作系统、车辆基础组件的煤矿自动驾驶车辆架构,提出煤矿井下网联式自动驾驶演进将经历3个阶段:第1阶段为远程自动驾驶,实现车辆驾驶人员从井下到井上的转移;第2阶段为具有紧急接管边界的车辆自动驾驶,以车辆自动驾驶为主,将远程紧急接管作为安全保障手段;第3阶段为“人−车−巷−云”协同控制,井下自动驾驶车辆安全高效自主运行,实现高度无人化智能运输。Abstract: This paper analyses the development status and technical characteristics of intelligent and networked technologies for conventional ground automatic driving. This paper also analyses the coal mine environmental characteristics, such as no GNSS (global navigation satellite system) signal coverage, low roadway illumination, lots of obstructions and obstacles and ubiquitous coal dust. In the context of the above technical and environmental characteristics, this study puts forward the key technologies of automatic driving research in underground coal mine. The technologies include mobile high-precision positioning technology without GNSS, laser radar technology, underground obstacle detection technology based on millimeter wave radar, underground low illumination video real-time enhancement and characteristic matching technology, underground environment high-precision map technology, underground autonomous vehicle decision planning technology, underground autonomous vehicle control execution technology, underground 5G communication technology and C-V2X direct connection communication technology. It is pointed out that the application of automatic driving in underground coal mine has the advantages of significant demand for fewer people or no people, clear operation management subject, closed scene, fixed route, slow speed, controllable permeability, good 5G construction foundation, easy open interface, etc. The reference architecture of 'human-vehicle-roadway-cloud' coal mine underground network connected automatic driving system is constructed. The system includes underground automatic driving vehicle, roadway infrastructure, personnel, coal mine cloud/edge computing platform and coal mine automatic driving application service platform. This paper designs the coal mine automatic driving vehicle architecture, which includes perception positioning system, network connected collaborative system, vehicle-mounted operating system and vehicle basic components. This paper puts forward three stages of the evolution of the network connected automatic driving in underground coal mines. The first stage is remote control and automatic driving, which realizes the transfer of vehicle drivers from underground to ground. The second stage is the automatic driving of vehicles with emergency takeover boundary. The vehicles are mainly driven by automatic driving, and remote emergency takeover is used as a safety guarantee method. The third stage is 'human-vehicle-roadway-cloud' collaborative control, the underground autonomous vehicles operate safely, efficiently and autonomously to realize highly unmanned intelligent transportation.
-
0. 引言
煤炭是我国主要能源,一次能源占比超60%,是国家能源安全稳定供应的“压舱石”,并且煤炭的主体能源地位短期内无法改变[1-2]。煤炭行业是高危行业,随着煤炭开采深度和强度的增加,煤矿冲击地压和煤与瓦斯突出已成为我国煤炭开采的主要灾害,严重威胁煤矿安全生产[1-2]。
目前煤矿冲击地压和煤与瓦斯突出监测预警方法主要有钻屑法、微震法、声发射法、电磁辐射法、电测法、声波探测法、顶板离层观测法、煤岩体变形测量法、应力监测法及红外辐射法等[3-9],在煤矿安全生产中发挥着重要作用。目前煤矿冲击地压和煤与瓦斯突出监测预警方法通过分析有关参数变化趋势,判断动力灾害发生的危险性和可能性;但无法预报动力灾害发生时间、位置和强度等;在煤矿冲击地压和煤与瓦斯突出发生时,也不能精准报警。目前煤矿冲击地压和煤与瓦斯突出监测预警方法主要用于长期监测预警,指导钻孔卸压和抽采等防治冲击地压和煤与瓦斯突出作业,消除冲击地压和煤与瓦斯突出危险因素,但不能替代煤矿冲击地压和煤与瓦斯突出事故报警。
煤矿冲击地压和煤与瓦斯突出事故诱因复杂,目前致灾机理尚不完全清楚,煤矿冲击地压和煤与瓦斯突出监测预警效果还难以满足我国煤矿安全生产需求,煤矿冲击地压和煤与瓦斯突出事故仍时有发生。目前,煤矿冲击地压事故主要靠人工发现,如果灾源附近人员全部遇难或被困,不在灾源的井下作业人员和地面调度室则不能及时发现灾害并应急救援,进而导致遇险人员窒息或失血过多而死亡,还会引发瓦斯和煤尘爆炸等严重次生事故。及时发现灾害,尽早疏通堵塞巷道和应急救援,争取黄金救援时间,则可减少掩埋和窒息造成的人员死亡,避免或减少瓦斯和煤尘爆炸等次生事故造成的大量人员伤亡,也可有效遏制煤矿冲击地压和煤与瓦斯突出事故的迟报、漏报和瞒报。因此,研究煤矿冲击地压和煤与瓦斯突出感知报警方法,具有重要理论意义和实用价值。
1. 煤矿冲击地压和煤与瓦斯突出事故报警现状
1.1 煤矿冲击地压报警现状
煤矿冲击地压事故感知难。目前仅有基于声音的煤矿冲击地压感知报警的设想[10],但难以排除采掘和运输等声音的影响,并且受声音传播速度慢的影响,响应速度慢。因此,目前煤矿冲击地压主要靠人工发现,还没有自动发现和报警的方法。
1.1.1 煤矿井下人工就地报警
当煤矿井下发生冲击地压事故,事故现场人员发现后,通过矿用调度电话向矿调度室报警。但如果灾源附近人员全部遇难或被困,不在灾源附近的井下作业人员不能尽早发现事故和报警,更不能及时应急救援。
1.1.2 调度室人工查看视频监控报警
目前煤矿井下设有摄像机,当发生事故时,如果调度员正好观察到该摄像机画面,可以发现事故。但煤矿井下摄像机多达数百台,地面调度室的调度员不能同时观察数百台摄像机画面。当冲击地压灾害发生瞬间,地面调度室人员往往不能及时发现和报警。
1.2 煤与瓦斯突出报警现状
目前,煤与瓦斯突出自动报警方法仅有基于甲烷、风速和风向传感器的煤与瓦斯突出自动报警方法[11-12]和基于声音的煤与瓦斯突出感知报警的设想[10]。
1.2.1 基于甲烷、风速和风向传感器的煤与瓦斯突出自动报警方法
基于甲烷、风速和风向传感器的煤与瓦斯突出自动报警方法已推广应用[11-12]。煤与瓦斯突出喷出的瓦斯运移到甲烷传感器时间长,多达数分钟。甲烷传感器将甲烷浓度转换为电信号的响应时间多达20 s。煤与瓦斯突出抛出的煤岩速度快。因此,基于甲烷、风速和风向传感器的煤与瓦斯突出自动报警方法受甲烷运移时间和传感器响应时间等影响,存在响应速度慢、甲烷传感器损毁前监测不到甲烷浓度大幅升高等问题。
基于甲烷、风速和风向传感器的煤与瓦斯突出自动报警方法主要根据甲烷浓度异常变化等进行报警。冲击地压灾害发生时,一般情况不会造成甲烷浓度明显变化。因此,基于甲烷、风速和风向传感器的煤与瓦斯突出自动报警方法不能用于煤矿冲击地压报警。
1.2.2 基于声音的煤与瓦斯突出感知报警的设想
煤与瓦斯突出声音相对采掘和运输等声音较弱。因此,基于声音的煤与瓦斯突出感知报警的设想[10]难以排除采掘和运输等声音的影响,并且受声音传播速度慢的影响,响应速度慢。
2. 煤矿冲击地压和煤与瓦斯突出特征
煤矿冲击地压和煤与瓦斯突出均是由于煤岩体承受压力超过自身强度极限,使得聚集在巷道周围煤岩体中的能量突然释放,导致大量破碎煤岩抛向采掘工作面和巷道空间的煤岩动力灾害。煤矿冲击地压和煤与瓦斯突出虽内在机理不同,但外在显现规律具有相似性[13-15]:① 大量煤岩突然破坏,并抛向采掘工作面和巷道空间。② 大量抛出的破碎煤岩速度较高,可达50 m/s。③ 大量抛出的破碎煤岩在采掘工作面和巷道空间扩散和堆积。④ 造成巷道支护和机电设备等损毁、倾倒、变形和移动。⑤ 造成水管、电缆、瓦斯抽采管路等损毁和坠落。⑥ 造成巷道毁坏及支护、机电设备和人员等被抛出煤岩掩埋。⑦ 造成采掘工作面和巷道空间产生强烈震动和煤岩破碎声响。⑧ 造成矿井风速和空气压力迅速增大后回落,风流反向,通风系统损毁。⑨ 造成采掘工作面和巷道空间产生电磁辐射和红外辐射。⑩ 造成煤矿井下人员伤亡。
冲击地压发生时,瓦斯释放量远小于煤与瓦斯突出,一般情况下甲烷浓度没有明显变化。煤与瓦斯突出发生时,会释放大量瓦斯,巷道中甲烷浓度升高,升高速度及波及范围远大于冲击地压。因此可根据甲烷浓度升高速度和波及范围,区分煤矿冲击地压和煤与瓦斯突出。
3. 煤矿冲击地压和煤与瓦斯突出图像感知报警方法
文献[16]和文献[17]揭示了煤矿冲击地压和煤与瓦斯突出的温度特征:煤矿冲击地压和煤与瓦斯突出抛出的煤岩温度高于巷道、煤壁和已剥离煤岩的温度。文献[18]和文献[19]揭示了煤矿冲击地压和煤与瓦斯突出的颜色特征:煤矿冲击地压和煤与瓦斯突出抛出的煤岩颜色与井下设备非黑色和非褐色有明显差异。文献[20]揭示了煤矿冲击地压和煤与瓦斯突出的深度特征:煤矿冲击地压和煤与瓦斯突出抛出的煤岩深度变化速度高于正常生产和顶板冒落造成的深度变化速度。文献[21]揭示了煤矿冲击地压和煤与瓦斯突出的掩埋特征:煤矿冲击地压和煤与瓦斯突出抛出的煤岩造成的颜色及其图形面积、形状(圆形度、矩形度和面积周长比)变化,不同于正常生产和顶板冒落的变化,其变化速度快、规则度低。
根据煤矿冲击地压和煤与瓦斯突出温度、颜色、深度、掩埋等图像特征[16-21],本文提出了煤矿冲击地压和煤与瓦斯突出图像感知报警方法,流程如图1所示。根据煤矿冲击地压和煤与瓦斯突出温度、颜色、深度、掩埋等图像特征,识别煤矿冲击地压和煤与瓦斯突出;再根据巷道空间和采掘工作面的甲烷浓度变化,区分冲击地压和煤与瓦斯突出,如果甲烷浓度迅速大面积升高,则判定为煤与瓦斯突出,否则判定为冲击地压。
![]() 图 1 煤矿冲击地压和煤与瓦斯突出图像感知报警方法Figure 1. Image perception alarm method of coal mine rock burst and coal and gas outburst
图 1 煤矿冲击地压和煤与瓦斯突出图像感知报警方法Figure 1. Image perception alarm method of coal mine rock burst and coal and gas outburst煤矿冲击地压和煤与瓦斯突出图像感知报警方法具有直观、响应速度快、非接触、监测范围广、简单可靠等优点。该方法可直观地记录煤矿冲击地压和煤与瓦斯突出真实情况。当煤矿冲击地压和煤与瓦斯突出事故报警后,调度室值班人员可通过录像,立即确认事故,及时进行应急救援。
4. 减少煤矿冲击地压和煤与瓦斯突出抛出的煤岩对图像感知影响的方法
煤矿冲击地压和煤与瓦斯突出抛出的煤岩,会造成摄像机和传感器损毁。为减少煤矿冲击地压和煤与瓦斯突出抛出的煤岩对图像感知的影响,本文提出了减少煤矿冲击地压和煤与瓦斯突出抛出的煤岩对图像感知影响的方法,具体内容如下。
1) 摄像机多点布置。煤矿冲击地压和煤与瓦斯突出的发生是一个短时、急剧而又猛烈的过程,可造成数百米范围内的巷道和设备损坏。为防止煤矿冲击地压和煤与瓦斯突出抛出的煤岩造成摄像机损毁或失效,摄像机应多点布置。摄像机应安装在掘进工作面、掘进巷道中间和入口,回采工作面、进风巷道中间和入口,主运输大巷和辅助运输大巷等地点。煤矿冲击地压和煤与瓦斯突出发生时,靠近灾源附近的摄像机会被损毁,但离灾源较远的摄像机会被保存下来,用于动力灾害感知报警。
2) 摄像机设置在较高位置。在同样条件下,靠近顶板的位置受煤矿冲击地压和煤与瓦斯突出抛出的煤岩影响小。因此,摄像机应设置在巷道顶板、巷道两帮靠近顶板、液压支架顶部及液压立柱靠近顶部等较高位置,以减小煤矿冲击地压和煤与瓦斯突出抛出的煤岩影响。
3) 视频数据及时传输。光信号传播速度远大于煤矿冲击地压和煤与瓦斯突出抛出的煤岩速度。因此,抛出的煤岩到达摄像机之前,摄像机已采集到煤矿冲击地压和煤与瓦斯突出图像。光信号和电信号传输速度远大于煤矿冲击地压和煤与瓦斯突出抛出的煤岩速度。因此,及时通过光缆和电缆等传输视频数据,可以在摄像机及线缆(电缆和光缆)损毁前,将已采集到的图像信号传输到地面,用于煤矿冲击地压和煤与瓦斯突出感知报警。
4) 甲烷传感器多点布置。甲烷传感器应设置在掘进工作面及其回风流、采煤工作面及其回风巷和进风巷、总回风巷等地点,感知瓦斯是否大范围大幅升高。如果甲烷浓度均大幅升高,则判定为煤与瓦斯突出;否则,判定为冲击地压。当然,煤矿冲击地压和煤与瓦斯突出抛出的煤岩会造成传感器损毁或失效,但未被损毁或失效的传感器可用于煤矿冲击地压和煤与瓦斯突出感知报警。
5. 结论
1) 煤矿冲击地压和煤与瓦斯突出自动感知报警方法是及时发现事故并应急救援,减少人员伤亡,避免或减少瓦斯和煤尘爆炸等次生事故发生,有效遏制事故迟报、漏报和瞒报的有效措施。
2) 煤矿冲击地压事故特征感知难,目前仅有基于声音的煤矿冲击地压感知报警的设想,但难以排除采掘和运输等声音的影响,并且受声音传播速度慢的影响,响应速度慢。因此,目前煤矿冲击地压主要靠人工发现,还没有自动发现和报警的方法。
3) 目前,煤与瓦斯突出自动报警方法仅有基于甲烷、风速和风向传感器的煤与瓦斯突出自动报警方法和基于声音的煤与瓦斯突出感知报警的设想。但基于甲烷、风速和风向传感器的煤与瓦斯突出自动报警方法存在响应速度慢、甲烷传感器损毁前监测不到甲烷浓度大幅升高等问题;基于声音的煤与瓦斯突出感知报警的设想难以排除采掘和运输等声音的影响,并且受声音传播速度慢的影响,响应速度慢。
4) 提出了煤矿冲击地压和煤与瓦斯突出图像感知报警方法:根据煤矿冲击地压和煤与瓦斯突出温度、颜色、深度、掩埋等图像特征,识别煤矿冲击地压和煤与瓦斯突出;再根据巷道空间和采掘工作面的甲烷浓度变化,区分冲击地压和煤与瓦斯突出,如果甲烷浓度大面积迅速升高,则判定为煤与瓦斯突出,否则判定为冲击地压。该方法具有直观、响应速度快、非接触、监测范围广、简单可靠等优点,可直观地记录煤矿冲击地压和煤与瓦斯突出真实情况;当煤矿冲击地压和煤与瓦斯突出事故报警后,调度室值班人员可以通过录像,立即确认事故,及时进行应急救援。
5) 提出了减少煤矿冲击地压和煤与瓦斯突出抛出的煤岩对图像感知影响的方法:摄像机多点布置,摄像机设置在较高位置,视频数据及时传输,甲烷传感器多点布置等。
-
![]()
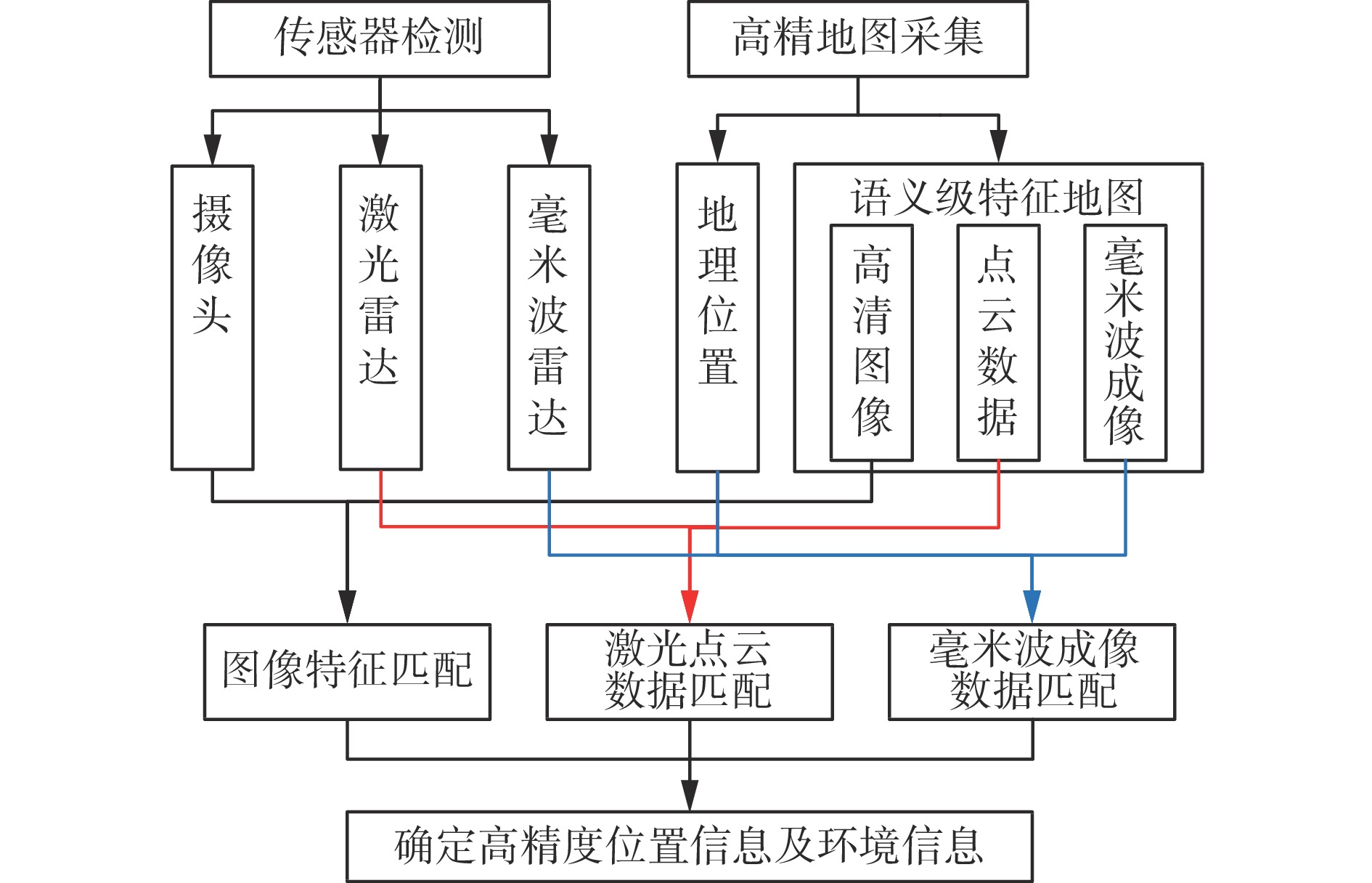
图 1 自动驾驶感知定位技术基本原理
Figure 1. Basic principle of perception positioning technology of automatic driving
![]()
图 3 煤矿井下网联式自动驾驶系统参考架构
Figure 3. Reference architecture of underground coal mine network connected and automatic driving system
表 1 煤矿井下智能化、网联化关键技术
Table 1 Key technologies of underground intelligent technologies and network connected technologies
分类 细分技术 技术优势 需要研究或解决的技术问题 智能化 GNSS RTK − 井下不可用,需要采用其他定位技术(如UWB) 激光雷达 检测精度高,点云数据匹配计算量相对小 成本高,需要验证TOF激光雷达的多设备相互干扰情况、煤
尘粉尘的干扰情况毫米波雷达 检测精度相对高,适用于障碍物检测 目前尚未发现公开的毫米波电磁成像地图产品 摄像头 检测精度高,技术成熟 需要验证井下低照度环境的实时特征匹配性能 高精地图 煤矿井下地图采集制作的限制条件少 需要建立井下地图采集制作的标准体系 决策规划 煤矿井下可重用地面经典方法和机制 需要符合煤矿井下巷道特征 控制执行 煤矿井下可重用地面经典方法和机制 线控、电子电气架构设计需符合煤矿安全要求 网联化 5G通信 煤矿5G建设和应用基础较好 上行资源紧张,依赖基站信号覆盖 C−V2X直连通信 专用频段上无系统间干扰,时延低,可靠性高 需要开展5.9 GHz频段传输特性研究,研究时间同步、应用层
协议、业务与链路的映射与选择机制 下载: 导出CSV
下载: 导出CSV
表 2 3GPP TS22.186定义的车联网应用场景指标
Table 2 Application scene indicator of V2X defined in 3GPP TS 22.186
应用场景 时延/ms 可靠性/% 数据传输速率/(Mbit·s−1) 远程驾驶 5 99.999 25(上行) 1(下行) 车辆编队 10 99.99 65 高级自动驾驶 3 99.999 53 传感器数据共享 3 99.999 1000
下载: 导出CSV
-
[1] 孙继平. 煤矿信息化与自动化发展趋势[J]. 工矿自动化,2015,41(4):1-5. SUN Jiping. Development trend of coal mine informatization and automation[J]. Industry and Mine Automation,2015,41(4):1-5.
[2] 孙继平. 煤矿智能化与矿用5G[J]. 工矿自动化,2020,46(8):1-7. SUN Jiping. Coal mine intelligence and mine-used 5G[J]. Industry and Mine Automation,2020,46(8):1-7.
[3] 孙继平. 煤矿智能化与矿用5G和网络硬切片技术[J]. 工矿自动化,2021,47(8):1-6. SUN Jiping. Coal mine intelligence,mine 5G and network hard slicing technology[J]. Industry and Mine Automation,2021,47(8):1-6.
[4] 姜汉军. 矿井辅助运输设备[M]. 徐州: 中国矿业大学 出版社, 2008. JIANG Hanjun. Mine auxiliary transport equipment[M]. Xuzhou: China University of Mining and Technology Press, 2008.
[5] 孙继平,陈晖升. 智慧矿山与5G和WiFi6[J]. 工矿自动化,2019,45(10):1-4. SUN Jiping,CHEN Huisheng. Smart mine with 5G and WiFi6[J]. Industry and Mine Automation,2019,45(10):1-4.
[6] 陈龙,王晓,杨健健,等. 平行矿山:从数字孪生到矿山智能[J]. 自动化学报,2021,47(7):1633-1645. CHEN Long,WANG Xiao,YANG Jianjian,et al. Parallel mining operating systems:from digital twins to mining intelligence[J]. Acta Automatica Sinica,2021,47(7):1633-1645.
[7] CHEN Shanzhi,HU Jinling,SHI Yan,et al. A vision of C-V2X:technologies,field testing and challenges with Chinese development[J]. IEEE Internet of Things Journal,2020,7(5):3872-3881. DOI: 10.1109/JIOT.2020.2974823
[8] 李晨鑫,胡金玲,赵锐,等. 车联网定位技术现状及展望[J]. 移动通信,2020,44(11):70-75. DOI: 10.3969/j.issn.1006-1010.2020.11.011 LI Chenxin,HU Jinling,ZHAO Rui,et al. V2X positioning technologies:the state of the art and perspective[J]. Mobile Communications,2020,44(11):70-75. DOI: 10.3969/j.issn.1006-1010.2020.11.011
[9] YD/T 3340—2018 基于LTE的车联网无线通信技术 空中接口技术要求[S]. YD/T 3340-2018 Technical requirements of air interface of LTE-based vehicular communication[S].
[10] 袁晓明,郝明锐. 煤矿辅助运输机器人关键技术研究[J]. 工矿自动化,2020,46(8):8-14. YUAN Xiaoming,HAO Mingrui. Research on key technologies of coal mine auxiliary transportation robot[J]. Industry and Mine Automation,2020,46(8):8-14.
[11] CHEN Shanzhi,HU Jinling,SHI Yan,et al. LTE-V:a TD-LTE-based V2X solution for future vehicular network[J]. IEEE Internet of Things Journal,2016,3(6):997-1005. DOI: 10.1109/JIOT.2016.2611605
[12] ETSI TR 137 985-2020 Overall description of radio access network (RAN) aspects for vehicle-to-everything (V2X) based on LTE and NR [S].
[13] 王国法,赵国瑞,胡亚辉. 5G技术在煤矿智能化中的应用展望[J]. 煤炭学报,2020,45(1):16-23. WANG Guofa,ZHAO Guorui,HU Yahui. Application prospect of 5G technology in coal mine intelligence[J]. Journal of China Coal Society,2020,45(1):16-23.
[14] 孟庆勇. 5G技术在煤矿井下应用架构探讨[J]. 工矿自动化,2020,46(7):28-33. MENG Qingyong. Probe on 5G architecture applied in coal mine underground[J]. Industry and Mine Automation,2020,46(7):28-33.
[15] 张立亚. 煤矿5G通信系统安全应用技术研究[J]. 工矿自动化,2021,47(12):8-12,45. ZHANG Liya. Research on safety application technology of coal mine 5G communication system[J]. Industry and Mine Automation,2021,47(12):8-12,45.
[16] YD/T 3847—2021 基于LTE的车联网无线通信技术 支持直连通信的路侧设备测试方法[S]. YD/T 3847-2021 Test method of sidelink-enabled road side unit for LTE-based vehicular communication [S].
[17] YD/T 3848—2021 基于LTE的车联网无线通信技术 支持直连通信的车载终端设备测试方法[S]. YD/T 3848-2021 Test method of vehicle terminal for LTE-based vehicular communication[S].
[18] 3GPP TS 22.186 Technical specification group services and system aspects; enhancement of 3GPP support for V2X scenarios; stage 1(release 15)[S].
-
期刊类型引用(4)
1. 张赟. 基于UWB技术的煤矿井下人-车防碰撞安全预警方法研究. 陕西煤炭. 2025(03): 169-173 .  百度学术
百度学术
2. 肖明国,张彪,康玉国,丁文,黄渊,郑学召. 面向钻孔救援的UWB雷达探测技术研究进展. 煤炭技术. 2024(06): 174-177 . 百度学术
3. 戴剑波. 基于UWB精确定位智能搜救仪设计. 自动化与仪器仪表. 2024(08): 298-301+306 . 百度学术
4. 王耀. 基于5G工业互联网的井工煤矿信息化技术研究. 工矿自动化. 2023(S1): 29-31 . 本站查看
其他类型引用(6)
-
其他相关附件

计量
- 文章访问数: 299
- HTML全文浏览量: 242
- PDF下载量: 89
- 被引次数: 10
