摘要:
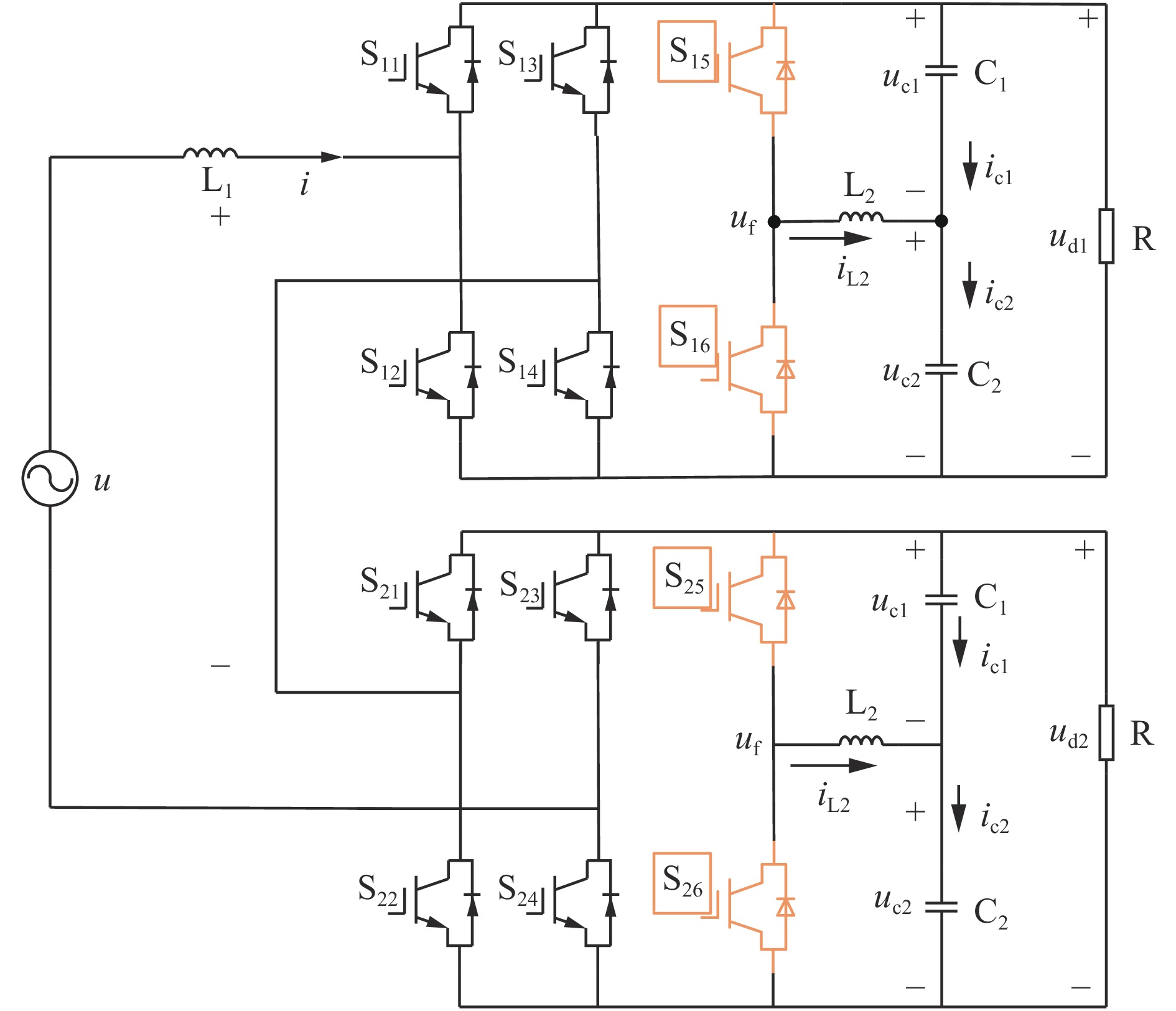
针对单相级联H桥整流器的电力电子设备在煤矿场景下运行过程中直流侧存在二次电压纹波,导致网侧电流畸变、电容值漂移等问题,通过分析单相级联H桥整流器直流侧二次电压纹波的形成原因,提出了一种基于分裂电容不相等的独立型解耦拓扑的优化控制方法。该方法通过在电容两端叠加二倍工频的电压来抵消二次电压纹波,实现了直流侧二次电压纹波的有效抑制。针对3种基于构造二次电压的解耦方式(直流分裂电容值不等,直流电压分量相等;直流分裂电容值不等,且直流电压分量也不等;直流分裂电容值相等,直流电压分量不等)进行了参数设计和控制策略的研究,并通过分析参数对二次电压幅值的影响,确定了最优的参数取值范围,以实现有效的功率解耦,并减小电容值,降低设备体积和成本。仿真结果表明:① 在0.2 s时加入分裂电容的独立型解耦拓扑(SC−IAPD)电路,基于解耦方式2的SC−IAPD电路控制方法、基于解耦方式2的SC−IAPD电路的优化控制方法、基于解耦方式1的 SC−IAPD电路控制方法的直流侧输出电压纹波都控制在1~1.5 V,说明对称半桥解耦电路可有效抑制直流电压波动,同时在负荷变化时具有良好的解耦性能。② 在轻载切重载的情况下,基于解耦方式2的SC−IAPD电路的优化控制方法能快速跟随负载变化,实现纹波的抑制,具有更强的带载能力和更佳的解耦效果。而在重载切轻载的情况下,基于解耦方式1的 SC−IAPD电路控制方法能够更好地实现解耦性能,将电压纹波控制在1 V以内。如果考虑电容值的最小化,基于解耦方式2的SC−IAPD电路的控制方法则更具优势。实验结果表明:① 负载突变前,传统控制方法和基于二次电压的解耦控制方法都能有效抑制直流侧的电压纹波,但基于二次电压的解耦控制方法在抑制电压纹波方面效果更佳,使直流侧的电压纹波更小。② 负载突变后,传统控制方法无法维持直流侧电压的稳定性,出现较大的震荡,失去稳定性。
刘诗源. 煤矿场景下单相级联H桥整流器解耦控制方法研究[J]. 工矿自动化,2024,50(4):159-168. doi: 10.13272/j.issn.1671-251x.2023090089.