

Path planning of coal mine underground robot based on improved artificial potential field algorithm
-
摘要: 路径规划是煤矿机器人在煤矿井下狭小巷道空间中应用亟待解决的关键技术之一。针对传统人工势场(APF)算法在狭小巷道环境中规划出的路径可能离巷道边界过近,以及在障碍物附近易出现目标不可达和路径振荡等问题,提出了一种基于改进APF算法的煤矿机器人路径规划方法。参考《煤矿安全规程》有关规定建立了巷道两帮边界势场,将机器人行驶路径尽量规划在巷道中间,以提高机器人行驶安全性;在障碍物斥力势场中引入调节因子,以解决目标不可达问题;引入转角限制系数以平滑规划出的路径,减少振荡,提高规划效率,保证规划路径的安全性。仿真结果表明:当目标点离障碍物很近时,改进APF算法可成功规划出能够抵达目标点的路径;改进APF算法规划周期数较传统算法平均减少了14.48%,转向角度变化累计值平均减少了87.41%,曲率绝对值之和平均减少了78.09%,表明改进APF算法规划的路径更加平滑,路径长度更短,规划效率和安全性更高。Abstract: Path planning is one of the key technologies that urgently need to be solved in the application of coal mine robots in narrow underground roadways. A path planning method for coal mine robots based on improved APF algorithm is proposed to address the issues of traditional artificial potential field (APF) algorithms that planning paths in narrow roadway environments may be too close to the roadway boundary, as well as the possibility of unreachable targets and path oscillations near obstacles. Referring to the relevant provisions of the Coal Mine Safety Regulations, the boundary potential field between the two sides of the roadway is established. The robot's path is planned as much as possible in the middle of the roadway to improve the safety of robot travel. The method introduces regulatory factors into the repulsive potential field of obstacles to solve the problem of unreachable targets. The method introduces corner constraint coefficients to smooth the planned path, reduce oscillations, improve planning efficiency, and ensure the safety of the planned path. The simulation results show that when the target point is very close to the obstacle, the improved APF algorithm can successfully plan a path that can reach the target point. The improved APF algorithm reduces the planning cycle by an average of 14.48% compared to traditional algorithms. The cumulative value of steering angle reduces by an average of 87.41%, and the sum of absolute curvature values is reduced by an average of 78.09%. The results indicate that the improved APF algorithm plans smoother paths, shorter path lengths, and has higher planning efficiency and safety.
-

图 5 基于改进APF算法的煤矿井下机器人路径规划流程
Figure 5. Path planning flow of coal mine underground robots based on improved artificial potential field algorithm

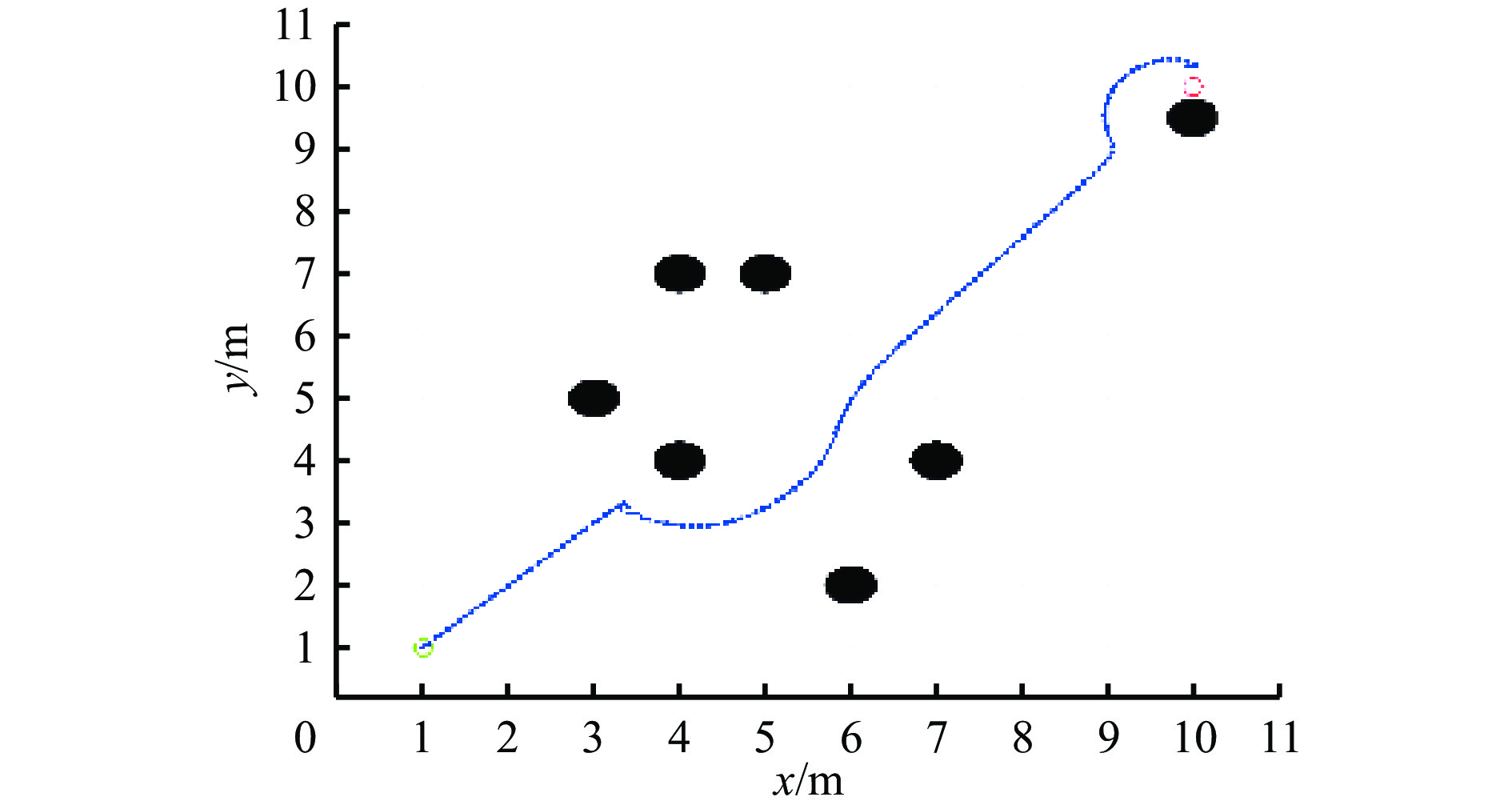
图 7 斥力势场修正前后路径规划仿真结果
Figure 7. Simulation results of path planning before and after repulsive potential field correction

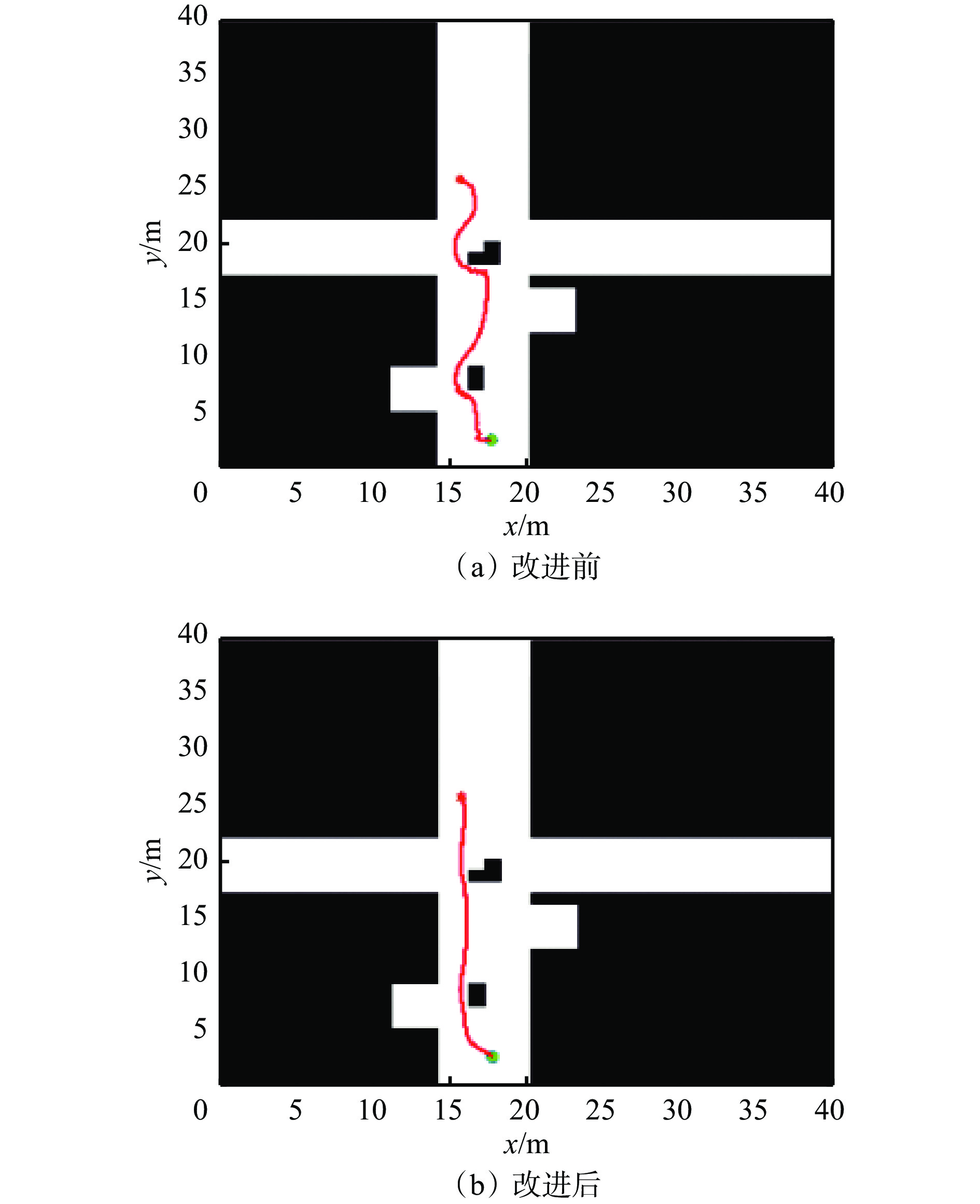
图 8 引入转角限制系数后仿真结果
Figure 8. Simulation results after introducing corner restriction coefficient
表 1 引入转角限制系数前后路径规划性能对比
Table 1. Performance comparison of path planning before and after introducing corner constraint coefficients
评价指标 算法改进前 算法改进后 路径长度/m 27.42 23.83 规划周期数 190 165 转向角度变化累计值/rad 17.45 6.88 曲率绝对值之和/m−1 73.06 12.39  下载: 导出CSV
下载: 导出CSV
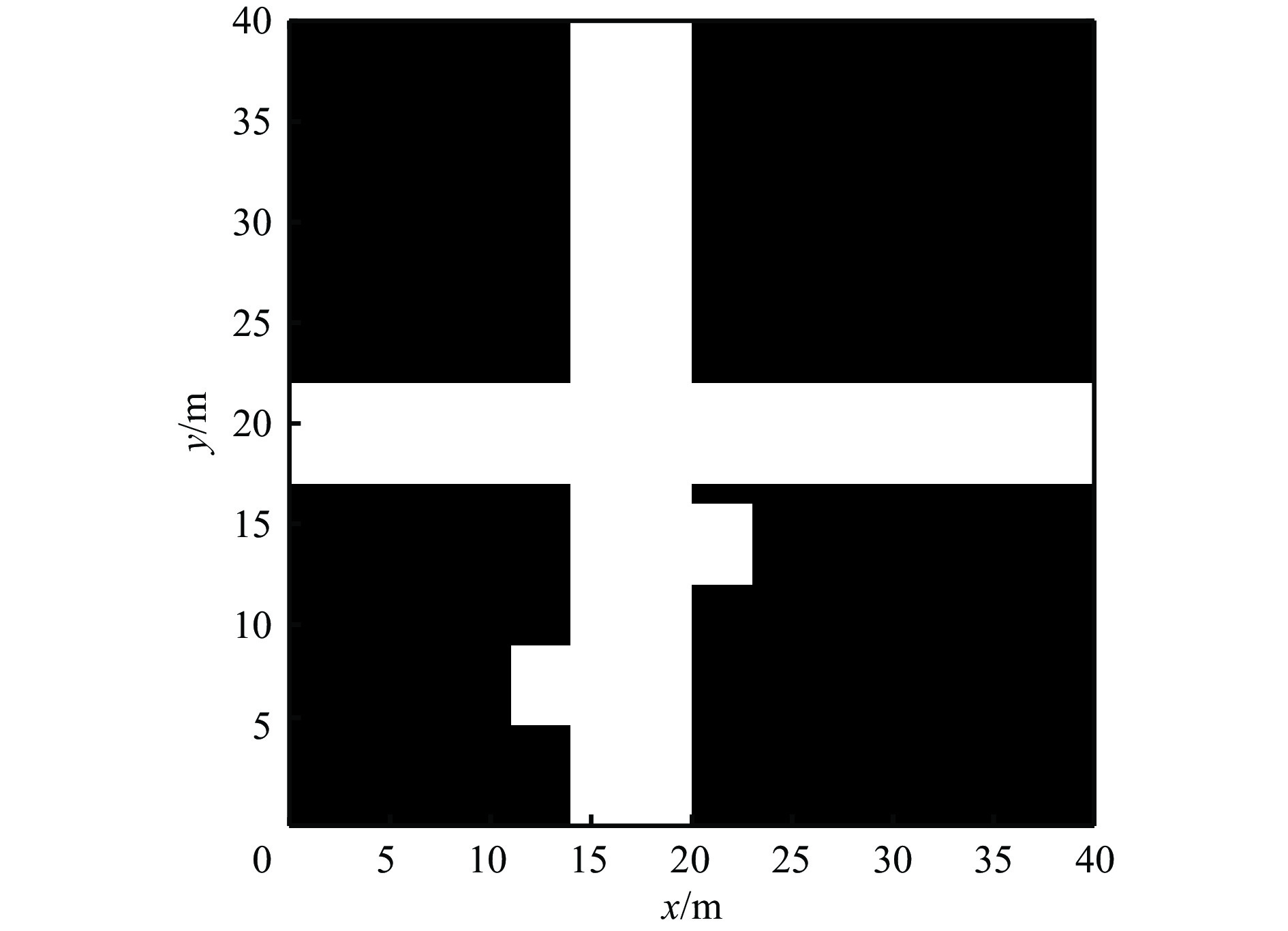
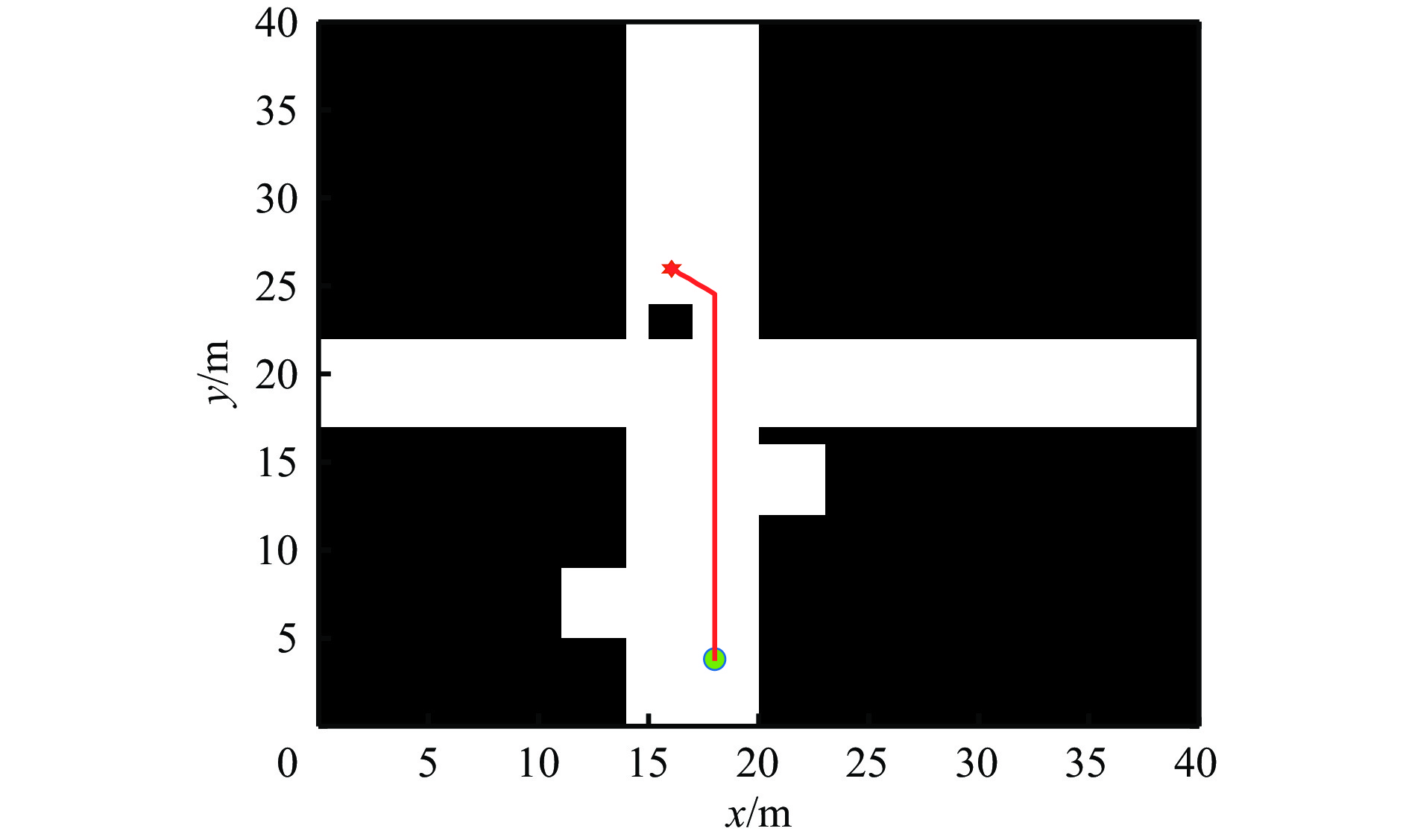
表 2 多个障碍物情况下改进前后路径规划仿真结果
Table 2. Simulation results of path planning before and after improvement under multiple obstacles
评价指标 1个障碍物 2个障碍物 3个障碍物 改进前 改进后 改进前 改进后 改进前 改进后 路径长度/m 19.48 16.83 28.25 23.82 24.26 20.83 规划周期数 135 117 196 165 168 144 转向角度变化累计值/rad 29.65 3.87 43.36 5.25 38.31 4.45 曲率绝对值之和/m−1 135.39 36.60 265.09 49.58 215.93 43.08
下载: 导出CSV
-
[1] 杨春雨,张鑫. 煤矿机器人环境感知与路径规划关键技术[J]. 煤炭学报,2022,47(7):2844-2872.YANG Chunyu,ZHANG Xin. Key technologies of coal mine robots for environment perception and path planning[J]. Journal of China Coal Society,2022,47(7):2844-2872. [2] 薛光辉,候称心,张云飞,等. 煤矿巷道修复重载作业机器人现状与发展趋势[J]. 工矿自动化,2020,46(9):8-14.XUE Guanghui,HOU Chenxin,ZHANG Yunfei,et al. Current situation and development trend of heavy-duty operation robot for coal mine roadway repair[J]. Industry and Mine Automation,2020,46(9):8-14. [3] 王国法,庞义辉,任怀伟,等. 矿山智能化建设的挑战与思考[J]. 智能矿山,2022,3(10):2-15.WANG Guofa,PANG Yihui,REN Huaiwei,et al. Challenges and reflections on intelligent construction of mines[J]. Journal of Intelligent Mine,2022,3(10):2-15. [4] 鲍久圣,章全利,葛世荣,等. 煤矿井下无人化辅助运输系统关键基础研究及应用实践[J]. 煤炭学报,2023,48(2):1085-1098.BAO Jiusheng,ZHANG Quanli,GE Shirong,et al. Basic research and application practice of unmanned auxiliary transportation system in coal mine[J]. Journal of China Coal Society,2023,48(2):1085-1098. [5] 郭泰,颜铤. 煤矿救援机器人路径规划的蚁群优化算法[J]. 能源与环保,2021,43(11):233-238.GUO Tai,YAN Ting. Ant colony optimization algorithm for path planning of coal mine rescue robot[J]. China Energy and Environmental Protection,2021,43(11):233-238. [6] 王国法,赵国瑞,任怀伟. 智慧煤矿与智能化开采关键核心技术分析[J]. 煤炭学报,2019,44(1):34-41.WANG Guofa,ZHAO Guorui,REN Huaiwei. Analysis on key technologies of intelligent coal mine and intelligent mining[J]. Journal of China Coal Society,2019,44(1):34-41. [7] 葛世荣,胡而已,李允旺. 煤矿机器人技术新进展及新方向[J]. 煤炭学报,2023,48(1):54-73.GE Shirong,HU Eryi,LI Yunwang. New progress and direction of robot technology in coal mine[J]. Journal of China Coal Society,2023,48(1):54-73. [8] 廖志伟,杨真,贺晓峰,等. 煤矿井下机器人研发应用现状及发展趋势研究[J]. 中国煤炭,2023,49(增刊2):13-23.LIAO Zhiwei,YANG Zhen,HE Xiaofeng,et al. Study on the current status and development trend of research and application of underground robots in coal mines[J]. China Coal,2023,49(S2):13-23. [9] 张伟民,张月,张辉. 基于改进A*算法的煤矿救援机器人路径规划[J]. 煤田地质与勘探,2022,50(12):185-193. doi: 10.12363/issn.1001-1986.22.04.0317ZHANG Weimin,ZHANG Yue,ZHANG Hui. Path planning of coal mine rescue robot based on improved A* algorithm[J]. Coal Geology & Exploration,2022,50(12):185-193. doi: 10.12363/issn.1001-1986.22.04.0317 [10] 姜媛媛,丰雪艳. 基于改进A*算法的煤矿救援机器人路径规划[J]. 工矿自动化,2023,49(8):53-59.JIANG Yuanyuan,FENG Xueyan. Path planning of coal mine rescue robot based on improved A* algorithm[J]. Journal of Mine Automation,2023,49(8):53-59. [11] GAO Yongxin,DAI Zhonglin,YUAN Jing. A multiobjective hybrid optimization algorithm for path planning of coal mine patrol robot[J]. Computational Intelligence and Neuroscience,2022. DOI: 10.1155/2022/9094572. [12] 田子建,高学浩,张梦霞. 基于改进人工势场的矿井导航装置路径规划[J]. 煤炭学报,2016,41(增刊2):589-597.TIAN Zijian,GAO Xuehao,ZHANG Mengxia. Path planning based on the improved artificial potential field of coal mine dynamic target navigation[J]. Journal of China Coal Society,2016,41(S2):589-597. [13] 薛光辉,刘爽,王梓杰,等. 基于改进概率路线图算法的煤矿机器人路径规划方法[J]. 工矿自动化,2023,49(6):175-181.XUE Guanghui,LIU Shuang,WANG Zijie,et al. A path-planning method for coal mine robot based on improved probability road map algorithm[J]. Journal of Mine Automation,2023,49(6):175-181. [14] 薛光辉,刘爽,李圆,等. 基于障碍物尺度的封闭狭长空间路径规划研究[J]. 矿业安全与环保,2023,50(3):62-67.XUE Guanghui,LIU Shuang,LI Yuan,et al. Research on path planning in closed long and narrow space based on obstacle scale[J]. Mining Safety & Environmental Protection,2023,50(3):62-67. [15] LI Wenhao. An improved artificial potential field method based on Chaos theory for UAV route planning[C]. The 34th Youth Academic Annual Conference of Chinese Association of Automation,Jinzhou,2019:47-51. [16] 徐劲力,许建宁,黄丰云,等. 基于改进人工势场法的移动机器人路径规划[J]. 计算机应用与软件,2023,40(7):289-293. doi: 10.3969/j.issn.1000-386x.2023.07.044XU Jinli,XU Jianning,HUANG Fengyun,et al. Path planning of mobile robot based on improved artificial potential field method[J]. Computer Applications and Software,2023,40(7):289-293. doi: 10.3969/j.issn.1000-386x.2023.07.044 [17] 陈天德,黄炎焱,沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报,2019,40(3):651-658. doi: 10.3969/j.issn.1000-1093.2019.03.025CHEN Tiande,HUANG Yanyan,SHEN Wei. Non-oscillation path planning based on virtual obstacle method[J]. Acta Armamentarii,2019,40(3):651-658. doi: 10.3969/j.issn.1000-1093.2019.03.025 [18] WU Haixiao,ZHANG Yong,HUANG Linxiong,et al. Research on vehicle obstacle avoidance path planning based on APF-PSO[J]. Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2023,237(6):1391-1405. doi: 10.1177/09544070221088364 [19] KHABIT O. Real-time obstacle avoidance for manipulators and mobile robots[J]. The International Journal of Robotics Research,1986,5(1):90-98. doi: 10.1177/027836498600500106 [20] 卢兵,黄文艺,王博,等. 融合车道线势场的模型预测车道保持方法[J]. 重庆理工大学学报(自然科学),2023,37(7):34-43.LU Bing,HUANG Wenyi,WANG Bo,et al. Lane potential field-based lane keeping strategy with model predictive control[J]. Journal of Chongqing University of Technology(Natural Science),2023,37(7):34-43. [21] 殷路,尹怡欣. 基于动态人工势场法的路径规划仿真研究[J]. 系统仿真学报,2009,21(11):3325-3328,3341.YIN Lu,YIN Yixin. Simulation research on path planning based on dynamic artificial potential field[J]. Journal of System Simulation,2009,21(11):3325-3328,3341. -






 点击查看大图
点击查看大图
计量
- 文章访问数: 135
- HTML全文浏览量: 37
- PDF下载量: 26
- 被引次数: 0
