

A method for estimating the step size of underground personnel based on generative adversarial networks
-
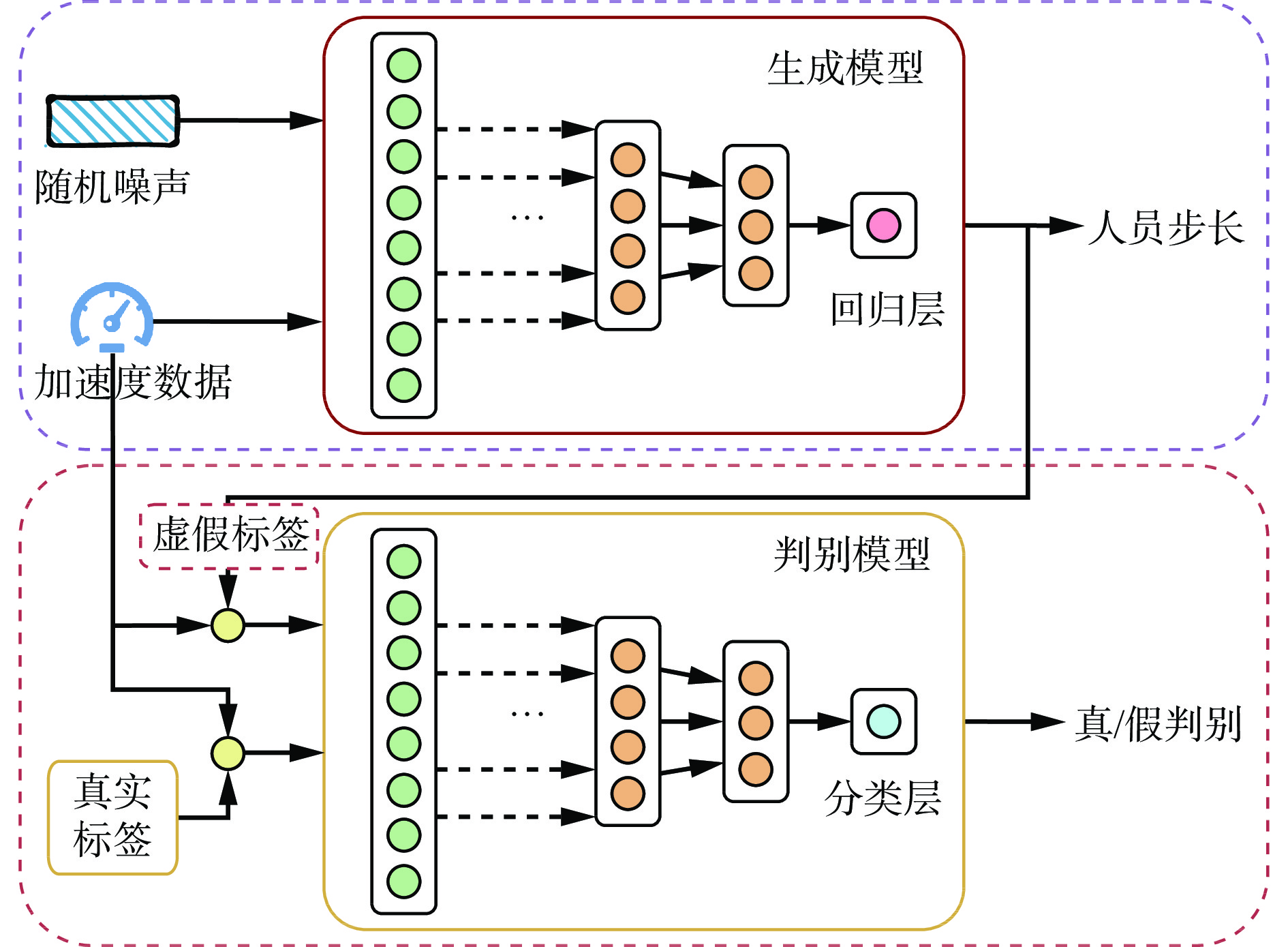
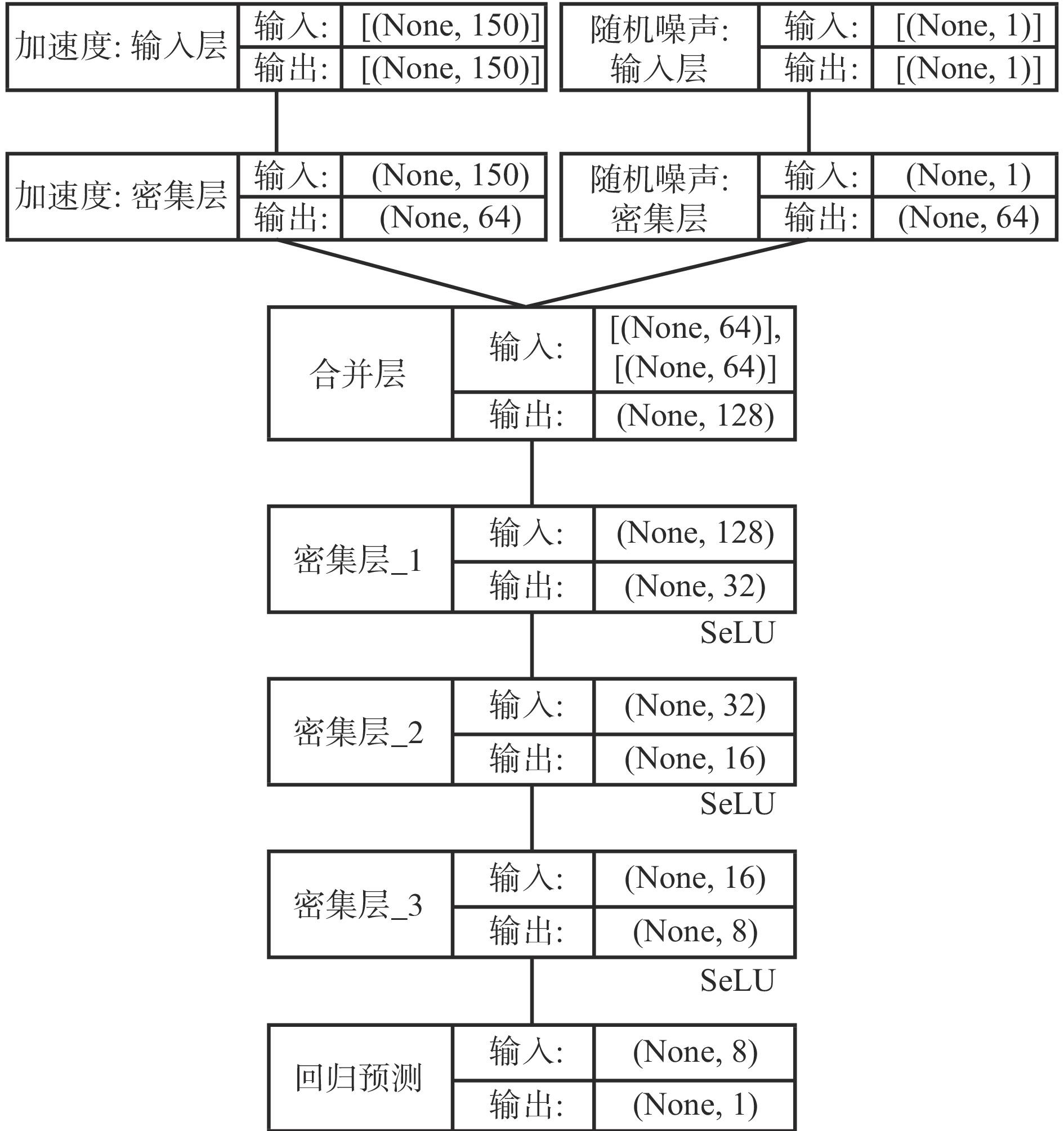
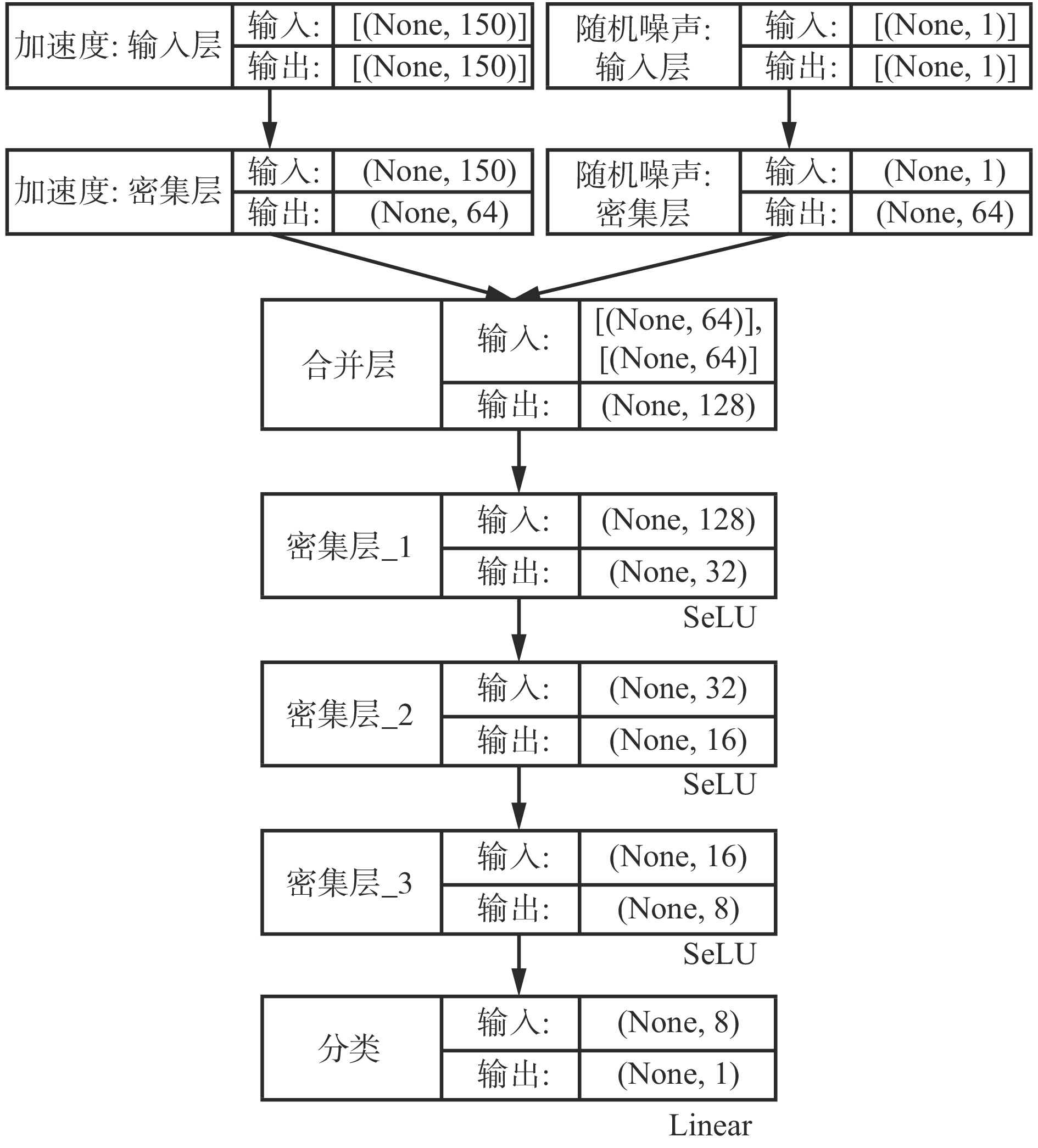
摘要: 针对基于行人航位推算(PDR)的煤矿井下人员定位系统中步长估计存在累计误差及传统深度学习方法所需数据集样本过大的问题,提出了一种基于生成对抗网络(GAN)的井下人员步长估计方法。GAN模型主要包括生成模型和判别模型2个部分,均采用深度神经网络(DNNs)实现。生成模型根据输入数据生成连续的结果分布(即标签),其输出层使用线性激活函数,以保留网络的线性特性,允许模型预测任何人员在行走过程中的步长;判别模型根据输入数据与标签判别是真实标签还是由生成器生成的标签,其输出层使用Sigmoid激活函数,以实现结果的二分类。确定生成模型与判别模型后,GAN模型联合2个模型进行训练,通过构建并优化生成器和判别器之间的动态竞争,使得生成器能够在不断迭代中学会生成更加逼真、难以区分的数据样本。实验结果表明,使用同样训练集及测试集的情况下,GAN模型的平均误差为0.14 m,标准差和均方根误差均小于DNNs模型,最小值均为0.74 m。户外测试结果表明,基于GAN的井下人员步长估计方法在上下坡场景的误差最小值为3.21%,最大值为4.79%;相比于上下坡场景,操场场景的误差更小,最大误差为1.91%。Abstract: In response to the problems of cumulative errors in step size estimation and the large sample size required by traditional deep learning methods in the pedestrian dead reckoning (PDR) based underground personnel positioning system in coal mines, a step size estimation method for underground personnel based on generative adversarial network (GAN) is proposed. The GAN model mainly includes two parts: generative model and discriminative model, both of which are implemented using deep neural networks (DNNs). The generative model aims to generate continuous result distributions (i.e. labels) based on input data. Its output layer uses a linear activation function to preserve the linear features of the network, allowing the model to predict the step size of any personnel during walking. The discriminant model aims to distinguish whether the input data and labels are real labels or labels generated by the generator. Its output layer uses a Sigmoid activation function to achieve binary classification of results. After determining the generative model and discriminant model, the GAN model combines two models for training. By constructing and optimizing the dynamic competition between the generator and discriminator, the generator can learn to generate more realistic and indistinguishable data samples in continuous iterations. The experimental results show that under the same training and testing sets, the average error of the GAN model is 0.14 m, and the standard deviation and root mean square error are both smaller than those of the DNNs model, with the minimum values being 0.74 m. The outdoor test results show that the GAN based underground personnel step estimation method has a minimum error of 3.21% and a maximum error of 4.79% in uphill and downhill scenarios. Compared to uphill and downhill scenarios, the error in playground scenarios is smaller, with a maximum error of 1.91%.
-

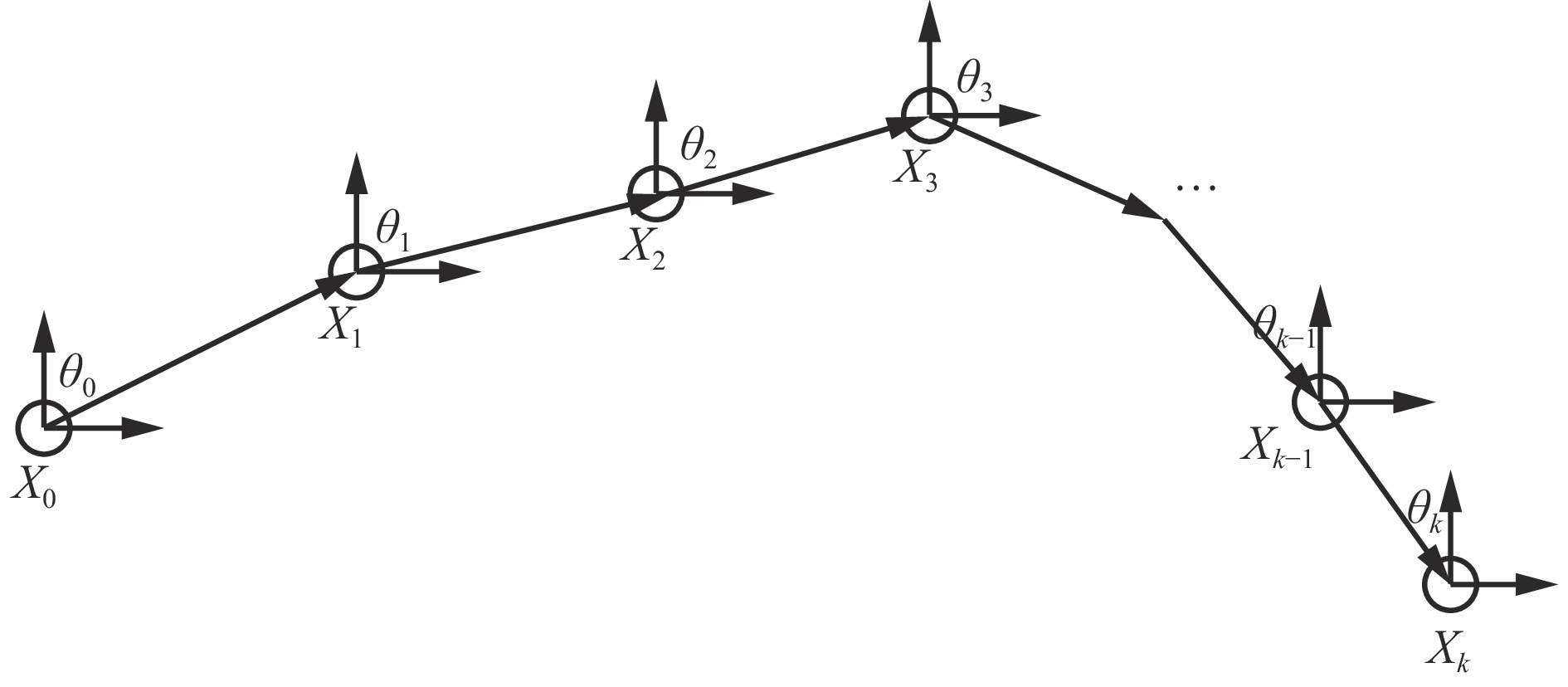
图 1 基于IMU的PDR算法
Figure 1. Pedestrian dead reckoning algorithm based on inertial measurement unit

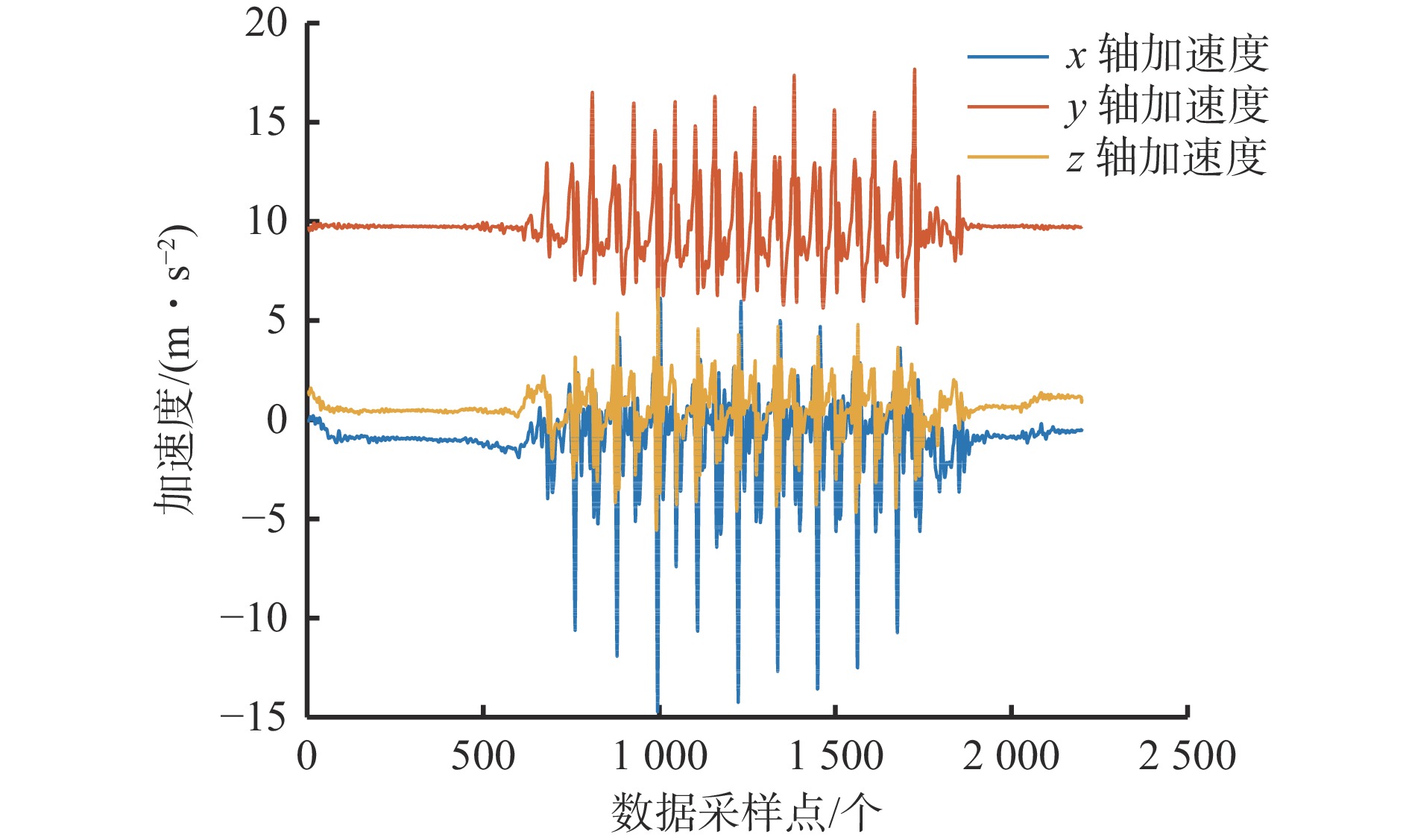
图 3 井下人员正常行走时三轴加速度计数据
Figure 3. Three-axis accelerometer data during normal underground personnel walking

图 10 不同学习率/衰变率下算法的RMSE
Figure 10. Root mean square error of the algorithm under different learning rate/decay rate

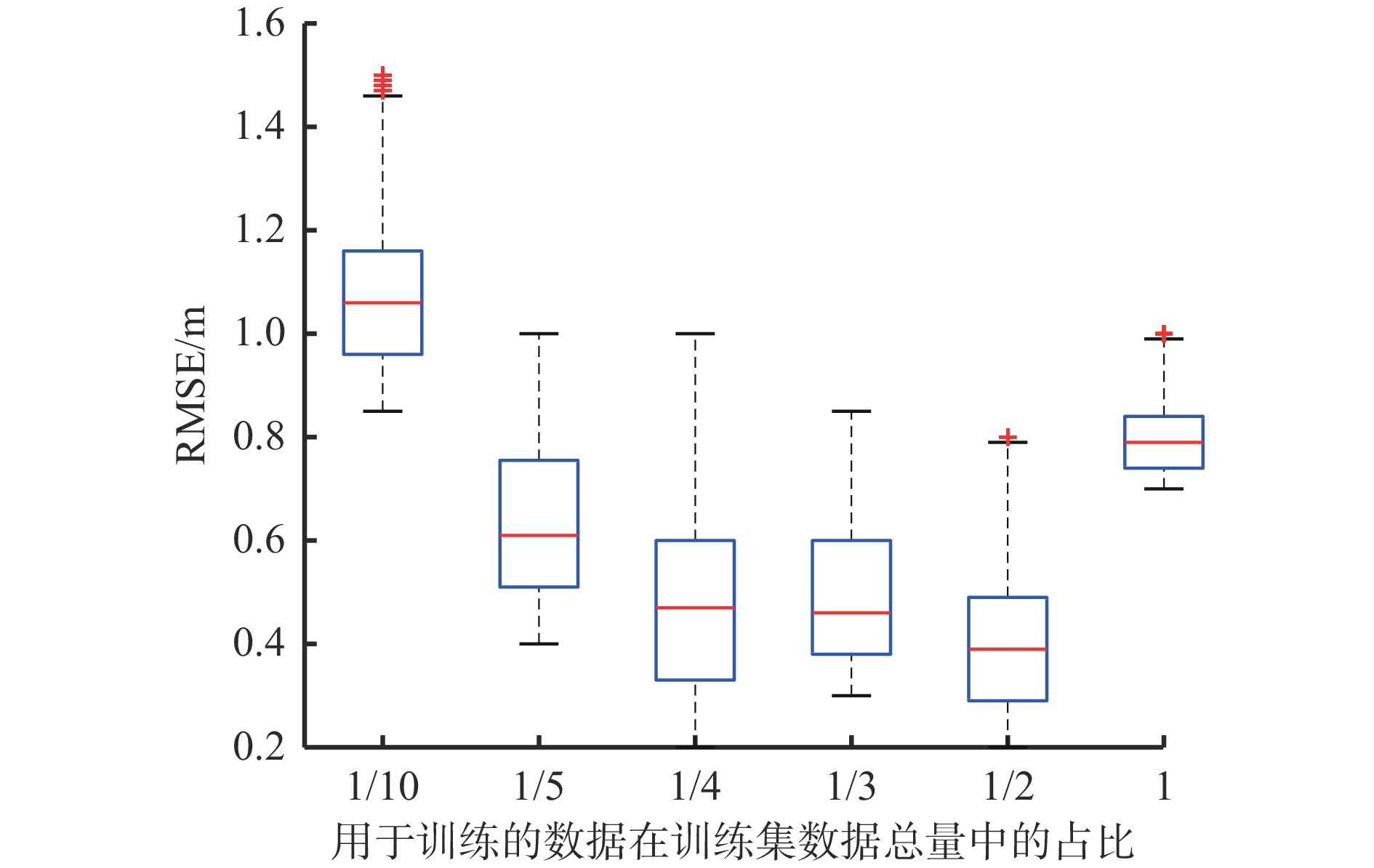
图 11 不同训练集比例下算法的RMSE
Figure 11. Root mean square error of the algorithm under different ratio of training data

图 12 一次实验中的行走步伐与步长估计
Figure 12. Walking pace and step size estimation in an experiment

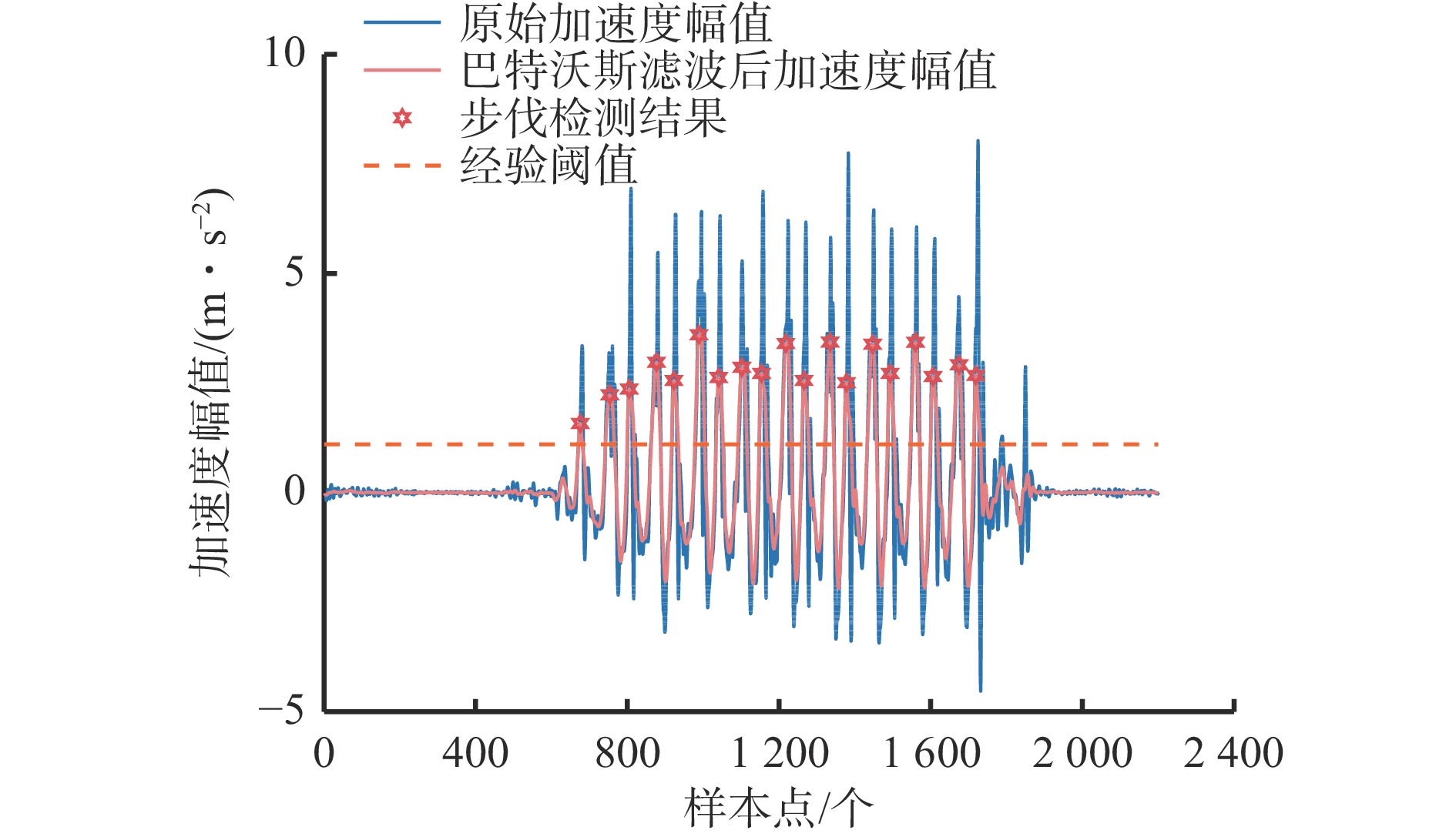
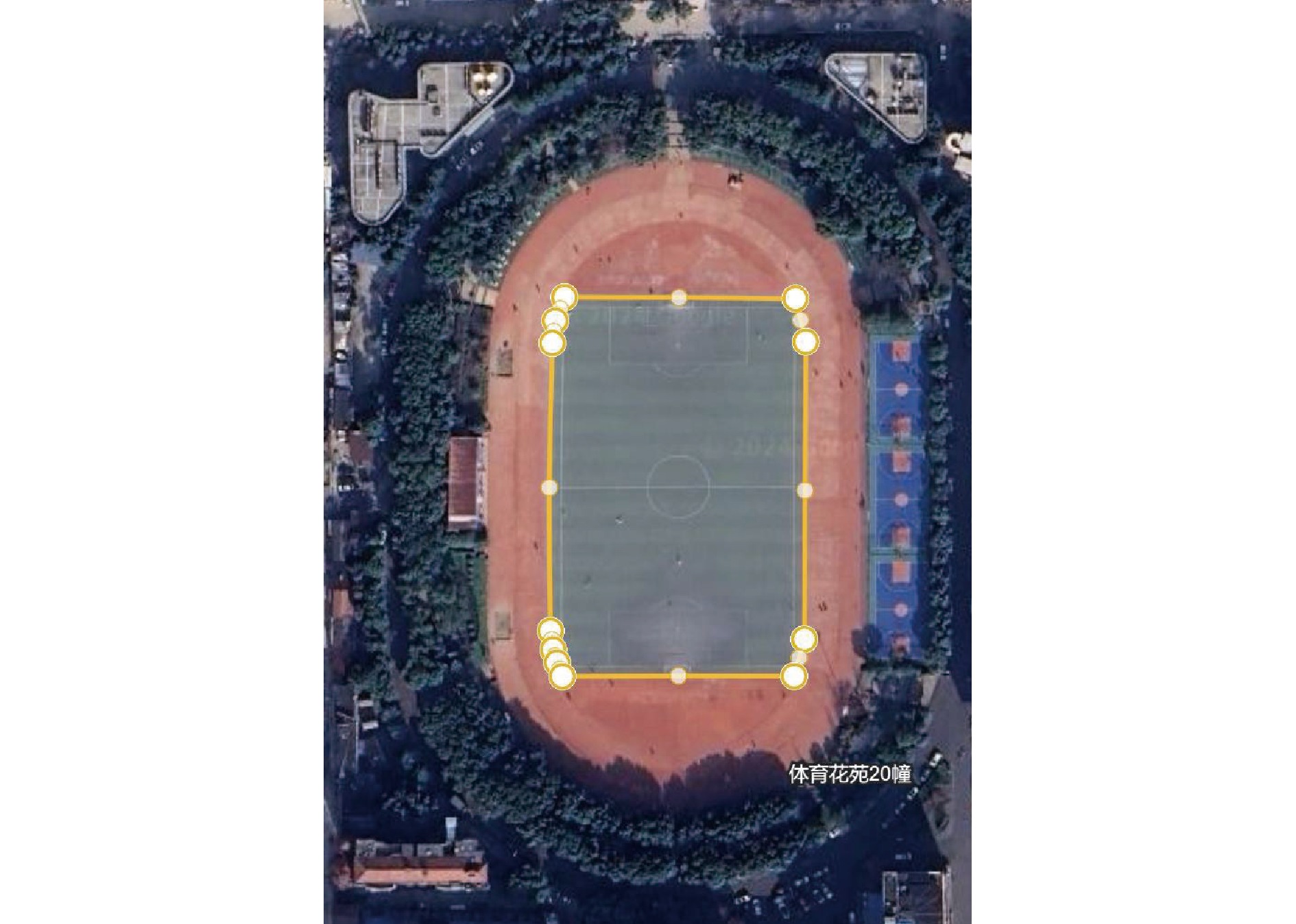
图 15 操场和上下坡测试步伐检测结果
Figure 15. Step detection results at playground and uphill and downhill
表 1 实验数据集
Table 1. Experimental dataset
数据集 行走速度 行走距离/m 采集次数 实际行走步数 训练集 慢速 20 50 1 639 中速 20 50 1 428 快速 20 50 1 104 测试集 混合 50 20 1 413  下载: 导出CSV
下载: 导出CSV
表 2 生成模型与判别模型超参数数值选项
Table 2. Hyperparameter numerical options for generative model and discriminant model
超参数 数值选项 优化器 SGD, RMSprop, Adam 学习率$ \alpha $ $ {10}^{-4} $, $ {2\times 10}^{-4} $, $ {10}^{-3},{2\times 10}^{-3} $ 动量$ {\beta }_{1} $ 0.5, 0.9 衰变率$ \lambda $ $ {10}^{-4},{10}^{-3},{10}^{-2},0 $ 样本数量占比 $ \dfrac{1}{10},\dfrac{1}{5},\dfrac{1}{4},\dfrac{1}{3},\dfrac{1}{2},1 $
下载: 导出CSV
表 3 生成模型与判别模型超参数默认值
Table 3. Default hyperparameters for generative model and discriminant model
超参数 生成模型 判别模型 优化器 Adam Adam 学习率$ \alpha $ $ {10}^{-4} $ $ {10}^{-4} $ 动量$ {\beta }_{1} $ 0.5 0.5 衰变率$ \lambda $ $ {10}^{-4} $ $ {10}^{-4} $ 样本数量占比 $ \dfrac{1}{2} $ $ \dfrac{1}{2} $
下载: 导出CSV
表 4 生成模型与判别模型超参数最优值
Table 4. Optimal hyperparameters for generative model and discriminant model
超参数 生成模型 判别模型 优化器 Adam Adam 学习率$ \alpha $ $ {10}^{-4} $ $ {10}^{-4} $ 动量$ {\beta }_{1} $ 0.5 0.5 衰变率$ \lambda $ $ {10}^{-4} $ $ 0 $ 样本数量占比 $ \dfrac{1}{2} $ $ \dfrac{1}{2} $
下载: 导出CSV
表 5 GAN模型与DNNs模型性能对比
Table 5. Performance comparison of generative adversarial network model and deep neural networks model
训练集数据量 模型 均值±STD/m RMSE/m 15 GAN 49.86±1.12 1.13 DNNs 50.06±1.49 1.49 30 GAN 49.83±0.99 1 DNNs 50.05±1.35 1.35 60 GAN 49.90±0.84 0.84 DNNs 50.12±1.28 1.29 120 GAN 49.89±0.76 0.77 DNNs 50.16±1.25 1.26 150 GAN 49.86±0.74 0.74 DNNs 50.15±1.23 1.24
下载: 导出CSV
表 6 户外最终测试结果
Table 6. Final outdoor test results
场景 实验次数 GAN DNNs 人员1距离/m 人员1误差/% 人员2距离/m 人员2误差/% 人员1距离/m 人员1误差/% 人员2距离/m 人员2误差/% 操场 1 362.64 1.13 363.34 1.33 366.36 2.17 367.30 2.43 2 364.76 1.72 364.51 1.65 369.95 3.17 367.32 2.44 3 362.56 1.11 364.85 1.75 371.64 3.64 369.59 3.07 4 362.59 1.12 364.26 1.58 370.89 3.43 368.96 2.90 5 364.46 1.64 364.82 1.74 365.29 1.87 370.34 3.28 上下坡 1 440.56 3.74 440.74 3.78 443.30 4.38 447.32 5.33 2 439.19 3.41 442.13 4.10 449.99 5.95 442.66 4.23 3 438.18 3.17 439.39 3.46 442.76 4.25 445.99 5.01 4 444.00 4.54 442.89 4.28 444.81 4.74 442.80 4.26 5 439.19 3.41 441.56 3.97 444.21 4.59 442.88 4.28
下载: 导出CSV
-
[1] 包建军,霍振龙,徐炜,等. 一种高精度井下人员无线定位方法[J]. 工矿自动化,2009,35(10):18-21.BAO Jianjun,HUO Zhenlong,XU Wei,et al. A wireless location method with high precision for underground personnel tracking[J]. Industry and Mine Automation,2009,35(10):18-21. [2] LEVI R W,JUDD T. Dead reckoning navigational system using accelerometer to measure foot impacts:US5583776[P]. 1996-12-10. [3] GUO Shuli,ZHANG Yitong,GUI Xinzhe,et al. An improved PDR/UWB integrated system for indoor navigation applications[J]. IEEE Sensors Journal,2020,20(14):8046-8061. doi: 10.1109/JSEN.2020.2981635 [4] WANG Hucheng,ZHANG Lei,WANG Zhi,et al. Pals:high-accuracy pedestrian localization with fusion of smartphone acoustics and PDR[EB/OL]. [2024-01-12]. https://ceur-ws.org/Vol-2498/short38.pdf. [5] DÍEZ L E,BAHILLO A,OTEGUI J,et al. Step length estimation methods based on inertial sensors:a review[J]. IEEE Sensors Journal,2018,18(17):6908-6926. doi: 10.1109/JSEN.2018.2857502 [6] VEZOČNIK M,JURIC M B. Average step length estimation models' evaluation using inertial sensors:a review[J]. IEEE Sensors Journal,2019,19(2):396-403. doi: 10.1109/JSEN.2018.2878646 [7] KONE Y,ZHU Ni,RENAUDIN V. Zero velocity detection without motion pre-classification:uniform AI model for all pedestrian motions (UMAM)[J]. IEEE Sensors Journal,2022,22(6):5113-5121. doi: 10.1109/JSEN.2021.3099860 [8] MIYAZAKI S. Long-term unrestrained measurement of stride length and walking velocity utilizing a piezoelectric gyroscope[J]. IEEE Transactions on Bio-Medical Engineering,1997,44(8):753-759. doi: 10.1109/10.605434 [9] TJHAI C,O'KEEFE K. Step-size estimation using fusion of multiple wearable inertial sensors[C]. International Conference on Indoor Positioning and Indoor Navigation,Sapporo,2017:1-8. [10] XIA Hao,ZUO Jinbo,LIU Shuo,et al. Indoor localization on smartphones using built-in sensors and map constraints[J]. IEEE Transactions on Instrumentation and Measurement,2019,68(4):1189-1198. doi: 10.1109/TIM.2018.2863478 [11] WANG Hucheng,XUE Can,WANG Zhi,et al. Smartphone-based pedestrian NLOS positioning based on acoustics and IMU parameter estimation[J]. IEEE Sensors Journal,2022,22(23):23095-23108. doi: 10.1109/JSEN.2022.3185248 [12] HANNINK J,KAUTZ T,PASLUOSTA C F,et al. Mobile stride length estimation with deep convolutional neural networks[J]. IEEE Journal of Biomedical and Health Informatics,2018,22(2):354-362. doi: 10.1109/JBHI.2017.2679486 [13] SUI J D,CHANG T S. IMU based deep stride length estimation with self-supervised learning[J]. IEEE Sensors Journal,2021,21(6):7380-7387. doi: 10.1109/JSEN.2021.3049523 [14] JIN H,KANG I,CHOI G,et al. Wearable sensor-based step length estimation during overground locomotion using a deep convolutional neural network[C]. Annual International Conference of the IEEE Engineering in Medicine and Biology Society,Mexico,2021:4897-4900. [15] DÍAZ S,DISDIER S,LABRADOR M A. Step length and step width estimation using wearable sensors[C]. The 9th IEEE Annual Ubiquitous Computing,Electronics & Mobile Communication Conference,New York,2018:997-1001. [16] HAN K,YU S M,KO S W,et al. Waveform-guide transformation of IMU measurements for smartphone-based localization[J]. IEEE Sensors Journal,2023,23(17):20379-20389. doi: 10.1109/JSEN.2023.3298713 [17] 孙延鑫,毛善君,苏颖,等. 改进的井下人员定位PDR算法研究[J]. 工矿自动化,2021,47(1):43-48.SUN Yanxin,MAO Shanjun,SU Ying,et al. Research on improved PDR algorithm for underground personnel positioning[J]. Industry and Mine Automation,2021,47(1):43-48. [18] WANG Qu,LUO Haiyong,YE Langlang,et al. Personalized stride-length estimation based on active online learning[J]. IEEE Internet of Things Journal,2020,7(6):4885-4897. doi: 10.1109/JIOT.2020.2971318 [19] 郭倩倩,崔丽珍,杨勇,等. 基于LSTM个性化步长估计的井下人员精准定位PDR算法[J]. 工矿自动化,2022,48(1):33-39.GUO Qianqian,CUI Lizhen,YANG Yong,et al. PDR algorithm for precise positioning of underground personnel based on LSTM personalized step size estimation[J]. Industry and Mine Automation,2022,48(1):33-39. [20] VOIGHT J. Quaternion algebras[M]. Berlin:Springer,2021. [21] DIEBEL J. Representing attitude:euler angles,unit quaternions,and rotation vectors[J]. Matrix,2006,58(15):1-35. -





 点击查看大图
点击查看大图

计量
- 文章访问数: 91
- HTML全文浏览量: 26
- PDF下载量: 9
- 被引次数: 0
