

UWB based measurement system for pushing progress of fully mechanized working face
-
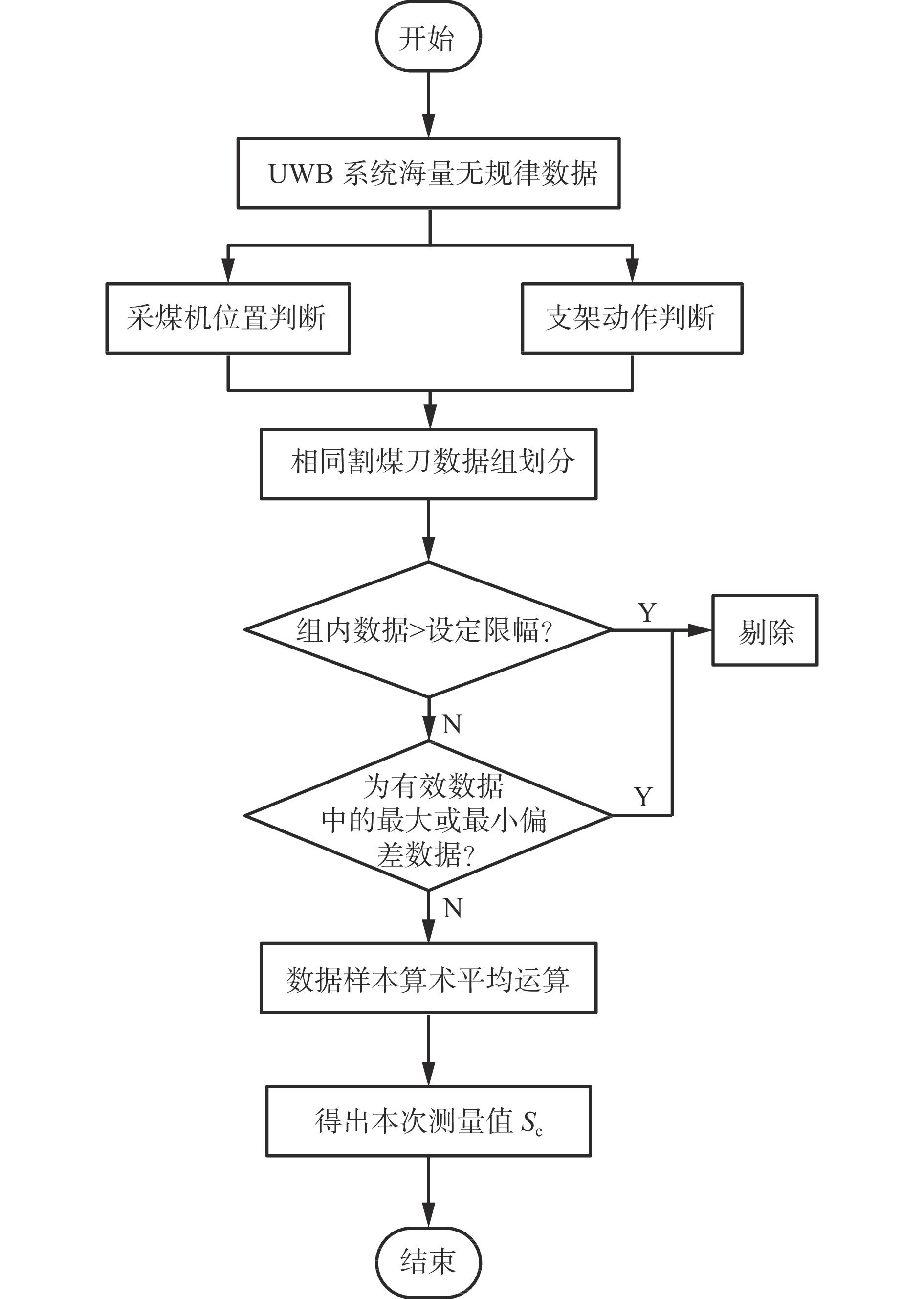
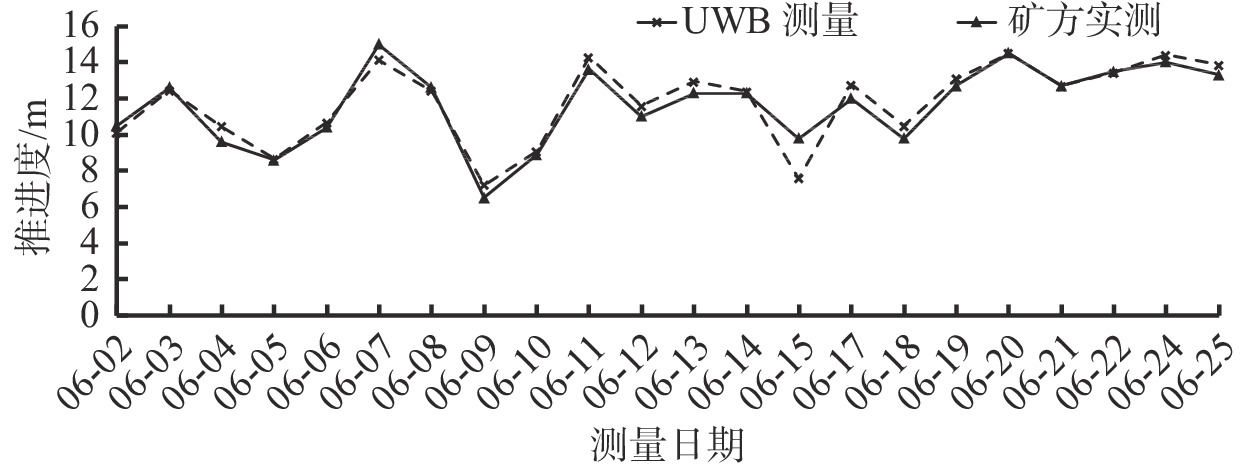
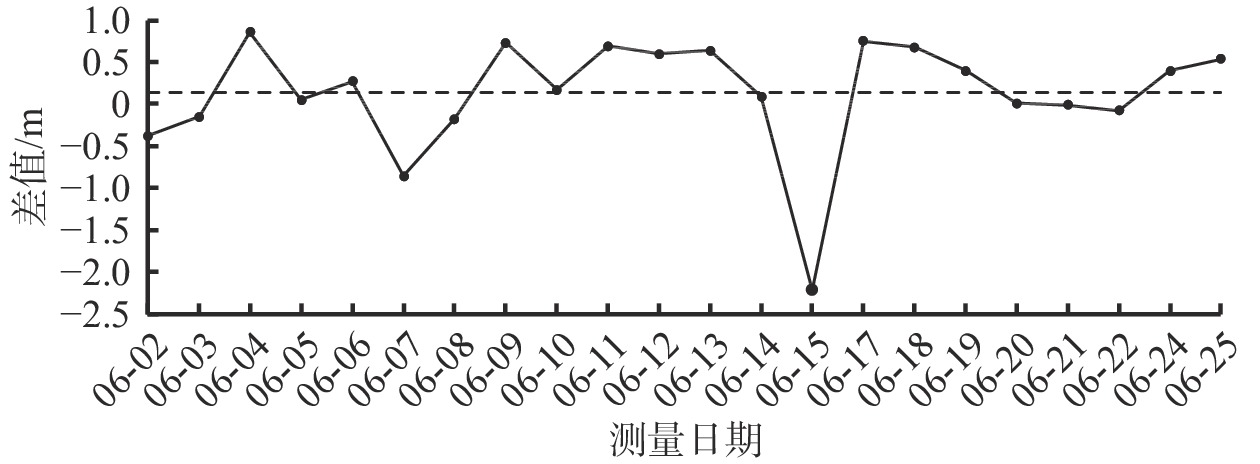
摘要: 针对目前综采工作面推进度的测量和计算方式存在费时费力、累计误差大、传感器损坏后无法重新计算等问题,提出了一种基于UWB测距技术的综采工作面推进度实时测量系统。该系统采用矿用本安型测距分站与测距标志卡组合的方式,通过无线通信实现对综采工作面巷道推进度的实时测量。在综采工作面端头液压支架布置测距分站,在回采巷道固定标志点悬挂测距标志卡,通过巷道内UWB无线信号测距,当即将开采到最近的测距标志卡位置时,撤掉该处测距标志卡,后续测距标志卡接替进行巷道推进度的测量与计算,依此循环往复,不断进行更替测量。结合采煤工艺,建立了依据采煤机位置和液压支架动作的限幅中值平均滤波模型,该模型将限幅滤波、中值滤波、算术平均滤波深度融合,以剔除海量数据中由于受到测量、遮挡等影响而造成的测量偏差较大的无效数据,同时消除有效数据中的最大和最小偏差数据,进一步保证了通过算术平均运算得到的测量值的准确性和有效性,实现了综采工作面推进度的连续测量。地面测试结果表明,测距分站1的最大误差为0.32 m,误差小于0.2 m的占比为84.62%;测距分站2的最大误差为0.48 m,误差小于0.2 m的占比为76.92%。井下工业性试验结果表明:该系统与矿方实测数据日平均推进度差值为0.13 m,证明了UWB测距技术在井下巷道条件下测距的可行性和基于采煤工艺的推进度测量模型的准确性。
-
关键词:
- 综采工作面 /
- 推进度测量 /
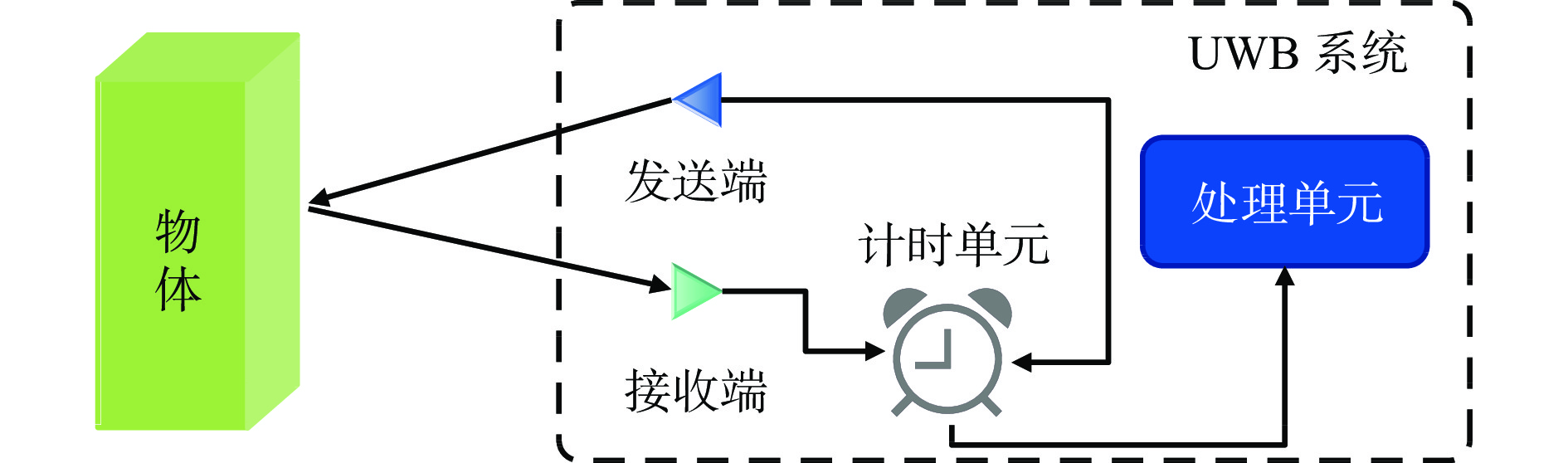
- UWB测距 /
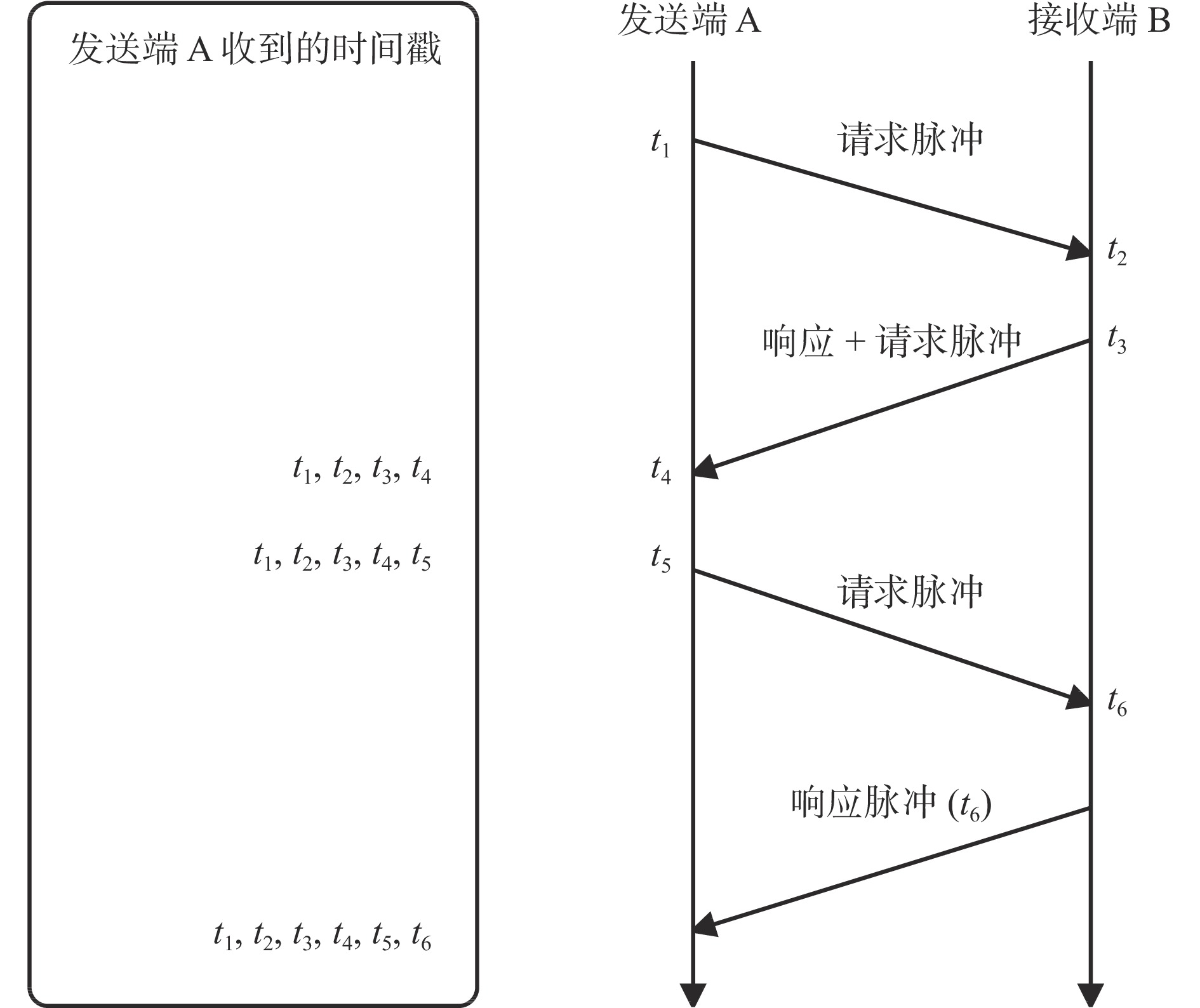
- 双边双向测距法 /
- 限幅中值平均滤波模型
Abstract: A real-time measurement system for the pushing progress of fully mechanized working face based on UWB ranging technology is proposed to address the problems of existing measurement and calculation methods, such as time-consuming, labor-intensive, large cumulative errors, and inability to recalculate after sensor damage. The system adopts a combination of mining intrinsic safety distance measurement substation and distance measurement marker card, and achieves real-time measurement of the progress of roadway pushing in the fully mechanized working face through wireless communication. At the end of the fully mechanized working face, a distance measuring sub station is arranged on the hydraulic support, and a distance measuring mark card is hung at the fixed marking point of the mining roadway. The distance is measured through UWB wireless signal in the roadway. When the mining is about to reach the nearest distance measuring mark card position, the distance measuring mark card is removed. The subsequent distance measuring mark card is replaced to measure and calculate the progress of the roadway pushing, so as to continuously replace the measurement. Based on the coal mining technology, a limited amplitude median average filtering model is established based on the position of the shearer and the action of the hydraulic support. This model deeply integrates limited amplitude filtering, median filtering, and arithmetic mean filtering to eliminate invalid data with large measurement deviations caused by measurement and occlusion in massive data. At the same time, the maximum and minimum deviation data in the effective data are eliminated, further ensuring the accuracy and effectiveness of the measurement values obtained through arithmetic mean operation. The continuous measurement of the progress of the fully mechanized working face is achieved. The ground test results show that the maximum error of ranging substation 1 is 0.32 m, and the proportion of errors less than 0.2 m is 84.62%. The maximum error of distance measurement substation 2 is 0.48 m, and the proportion of errors less than 0.2 m is 76.92%. The industrial underground test results show that the difference between the daily average advance degree of the system and the measured data of the coal mine is 0.13 m. The result proves the feasibility of UWB ranging technology in underground roadway conditions and the accuracy of the pushing progress measurement model based on coal mining technology. -

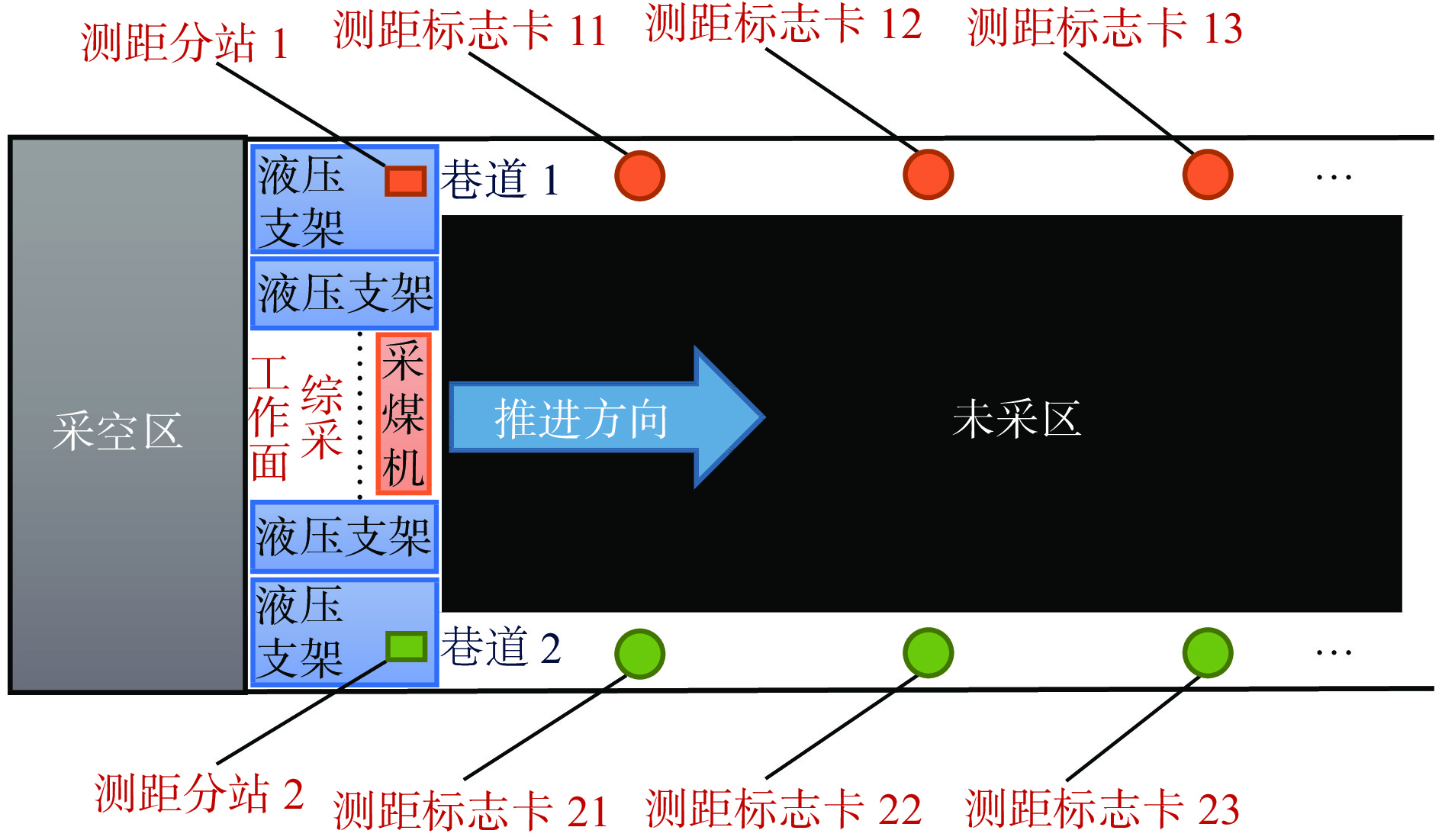
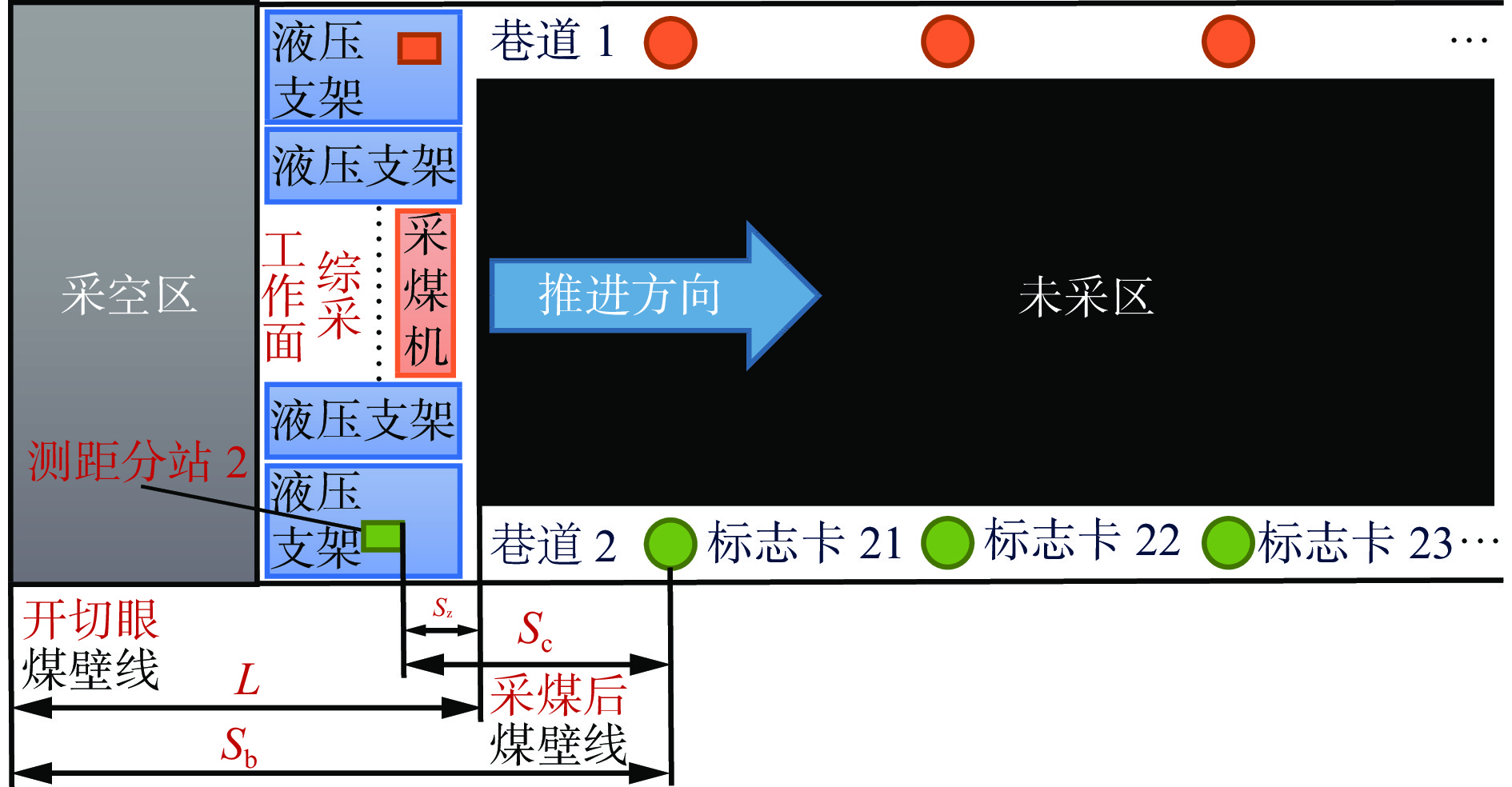
图 5 测距分站与测距标志卡布置方案
Figure 5. Layout scheme for ranging substations and ranging mark cards

图 6 基于UWB的推进度测量计算方法
Figure 6. Calculation method for pushing progress measurement based on UWB

图 7 限幅中值平均滤波模型算法流程
Figure 7. Algorithm flow of limited amplitude median average filtering model

图 10 推进度测量系统井下安装
Figure 10. Underground installation of the pushing progress measurement system

图 11 基于UWB的推进度测量系统与矿方实测当日推进度对比
Figure 11. Comparison between the pushing progress measurement system based on UWB and daily pushing progress measured by mine
表 1 地面测试结果
Table 1. Ground test results
m 分站1 分站2 激光 UWB 误差 激光 UWB 误差 0.990 0.90 −0.09 1.010 1.212 −0.20 2.050 2.03 −0.02 1.980 2.170 −0.19 2.990 2.97 −0.02 3.010 3.157 −0.15 3.900 3.84 −0.06 3.960 4.091 −0.13 4.870 4.87 0 5.030 5.086 −0.06 6.030 6.05 0.02 6.080 6.118 −0.04 7.230 7.25 0.02 6.940 6.987 −0.05 8.640 8.67 0.03 8.040 8.120 −0.08 10.030 10.07 0.04 9.050 9.090 −0.04 12.440 12.50 0.06 10.100 10.126 −0.03 15.869 16.06 0.19 13.800 13.698 0.10 19.460 19.55 0.09 15.120 14.908 0.21 22.877 23 0.12 20.200 20.098 0.10 26.590 26.6 0.01 24.730 24.708 0.02 27.860 28 0.14 27.650 27.680 −0.03 29.410 29.48 0.07 29.870 29.767 0.10 30.420 30.49 0.07 35.260 35.179 0.08 35.290 35.41 0.12 39.780 39.750 0.03 40.270 40.36 0.09 45.140 44.929 0.21 45.400 45.51 0.11 50.420 50.284 0.14 49.470 49.65 0.18 55.190 55.165 0.02 59.290 59.48 0.19 59.910 59.545 0.36 64.241 64.52 0.28 64.560 64.422 0.14 71.160 71.48 0.32 69.873 69.396 0.48 75.800 76.02 0.22 74.580 74.359 0.22 88.419 88.74 0.32 88.330 88.302 0.03  下载: 导出CSV
下载: 导出CSV
表 2 试验巷道地质条件
Table 2. Geological conditions of the tested roadway
长度/m 倾向角度/(°) 形状 巷宽/m 巷高/m 标点间隔/m 2 880 0~5 矩形 4.6 2.8 50
下载: 导出CSV
-
[1] 刘正. 基于支架推移油缸行程的综采面推进距离算法研究[J]. 陕西煤炭,2022,41(5):113-117.LIU Zheng. Research on algorithm of advancing distance of fully mechanized mining face based on the support pushing cylinder stroke[J]. Shaanxi Coal,2022,41(5):113-117. [2] 朱朋飞,郭龙真. 基于机器视觉的煤矿井下工作面推进度智能识别方法[J]. 煤矿机械,2023,44(8):200-203.ZHU Pengfei,GUO Longzhen. Intelligent recognition method of advancing degree of coal mine underground working face based on machine vision[J]. Coal Mine Machinery,2023,44(8):200-203. [3] 翟新献,赵晓凡,郭钊洋,等. 综放开采上覆巨厚砾岩层变形垮落冲击相似模拟研究[J]. 采矿与安全工程学报,2023,40(5):1018-1030.ZHAI Xinxian,ZHAO Xiaofan,GUO Zhaoyang,et al. Similar simulation study on deformation and collapsing impact of overlying hugely-thick conglomerate stratum in longwall top-coal caving mining[J]. Journal of Mining & Safety Engineering,2023,40(5):1018-1030. [4] 王朝引. 回采速度对厚煤层综采工作面冲击显现的影响[J]. 煤炭科学技术,2019,47(8):96-101.WANG Chaoyin. Effect of mining speed on bump manifestation of fully-mechanized mining face in deep and thick coal seam[J]. Coal Science and Technology,2019,47(8):96-101. [5] 赵同彬,郭伟耀,韩飞,等. 工作面回采速度影响下煤层顶板能量积聚释放分析[J]. 煤炭科学技术,2018,46(10):37-44.ZHAO Tongbin,GUO Weiyao,HAN Fei,et al. Analysis on energy accumulation and release of roof under influence of mining speed[J]. Coal Science and Technology,2018,46(10):37-44. [6] 刘金海,孙浩,田昭军,等. 煤矿冲击地压的推采速度效应及其动态调控[J]. 煤炭学报,2018,43(7):1858-1865.LIU Jinhai,SUN Hao,TIAN Zhaojun,et al. Effect of advance speed on rock burst in coal mines and its dynamic control method[J]. Journal of China Coal Society,2018,43(7):1858-1865. [7] 李生鑫,孙珍平,刘春刚. 基于通风量与推进度的采空区自然发火数值模拟[J]. 煤矿安全,2020,51(9):196-200.LI Shengxin,SUN Zhenping,LIU Chungang. Numerical simulation of spontaneous combustion in goaf based on ventilation and advancing degree[J]. Safety in Coal Mines,2020,51(9):196-200. [8] 曹拓拓,宣德全,范振. 易自燃煤层低推进度综放工作面采空区自燃防治技术[J]. 煤矿安全,2014,45(12):92-95.CAO Tuotuo,XUAN Dequan,FAN Zhen. Goaf spontaneous combustion control technology of mechanized face of spontaneous combustion coal seam with low advance degree[J]. Safety in Coal Mines,2014,45(12):92-95. [9] 姜希印. 易自燃孤岛工作面安全推进速度研究[J]. 工矿自动化,2019,45(12):7-11.JIANG Xiyin. Research on safe advancing speed of spontaneous combustion isolated working face[J]. Industry and Mine Automation,2019,45(12):7-11. [10] 季文博,齐庆新,李宏艳,等. 沙曲矿单一工作面推进度与瓦斯涌出量关系研究[J]. 煤炭工程,2012,44(12):95-98.JI Wenbo,QI Qingxin,LI Hongyan,et al. Study on relationship between advancing rate of single coal mining face and gas emission value in Shaqu Mine[J]. Coal Engineering,2012,44(12):95-98. [11] 肖寒撼,李维光,华道友,等. 单一煤层采煤工作面瓦斯抽采量与推进度之间关系研究[J]. 中国煤炭,2018,44(3):140-142,146.XIAO Hanhan,LI Weiguang,HUA Daoyou,et al. Study on the relationship between advance rate and gas drainage volume of single coal seam work face[J]. China Coal,2018,44(3):140-142,146. [12] 邓小明,邓志龙. 基于UWB技术的煤矿无线传感器网络设计研究[J]. 煤炭技术,2023,42(6):244-247.DENG Xiaoming,DENG Zhilong. Design and research of coal mine wireless sensor network based on UWB technology[J]. Coal Technology,2023,42(6):244-247. [13] 薛光辉,李圆,张云飞. 基于激光靶向跟踪的悬臂式掘进机位姿测量系统研究[J]. 工矿自动化,2022,48(7):13-21.XUE Guanghui,LI Yuan,ZHANG Yunfei. Research on pose measurement system of cantilever roadheader based on laser target tracking[J]. Journal of Mine Automation,2022,48(7):13-21. [14] 王俊秀. UWB测距技术在煤矿井下的应用[J]. 煤矿机械,2023,44(9):145-147.WANG Junxiu. Application of UWB ranging technology in underground coal mine[J]. Coal Mine Machinery,2023,44(9):145-147. [15] 丁震,张雨晨. 煤矿井下粉尘浓度对UWB测距精度的影响研究[J]. 工矿自动化,2021,47(11):131-134.DING Zhen,ZHANG Yuchen. Research on the influence of coal mine dust concentration on UWB ranging precision[J]. Industry and Mine Automation,2021,47(11):131-134. [16] 陈伟. 基于UWB技术的煤矿精确定位系统[J]. 煤矿机械,2023,44(5):177-180.CHEN Wei. Coal mine precise positioning system based on UWB technology[J]. Coal Mine Machinery,2023,44(5):177-180. [17] 郭爱军. 基于UWB的PDOA与TOF煤矿井下联合定位方法[J]. 工矿自动化,2023,49(3):137-141.GUO Aijun. A joint positioning method of PDOA and TOF in coal mines based on UWB[J]. Journal of Mine Automation,2023,49(3):137-141. [18] 郁露,唐超礼,黄友锐,等. 基于UWB和IMU的煤矿机器人紧组合定位方法研究[J]. 工矿自动化,2022,48(12):79-85.YU Lu,TANG Chaoli,HUANG Yourui,et al. Research on tightly combined positioning method of coal mine robot based on UWB and IMU[J]. Journal of Mine Automation,2022,48(12):79-85. [19] 任昊誉,郭晨霞,杨瑞峰. 卡尔曼滤波提高UWB测距精度研究[J]. 电子测量技术,2021,44(18):111-115.REN Haoyu,GUO Chenxia,YANG Ruifeng. Research on improving UWB ranging accuracy by Kalman filter[J]. Electronic Measurement Technology,2021,44(18):111-115. [20] 泰勒. 数字滤波器原理及应用[M]. 北京:国防工业出版社,2013.TAYLOR F J. The principle and application of digital filter[M]. Beijing:National Defence Industry Press,2013. [21] 唐丽均,吴畏,刘世森. 基于灰色预测模型的井下精确人员定位方法[J]. 工矿自动化,2021,47(8):128-132.TANG Lijun,WU Wei,LIU Shisen. Precise personnel positioning method in underground mine based on grey prediction model[J]. Industry and Mine Automation,2021,47(8):128-132. [22] 张倩. 基于改进伪中值滤波和非局部均值滤波的红外图像滤波方法[J]. 工矿自动化,2014,40(12):57-60.ZHANG Qian. A filtering method for infrared image based on improved pseudo median filtering and non-local means filtering[J]. Industry and Mine Automation,2014,40(12):57-60. -




 点击查看大图
点击查看大图
计量
- 文章访问数: 104
- HTML全文浏览量: 20
- PDF下载量: 28
- 被引次数: 0
