

Measurement system for key attitude parameters of hydraulic support
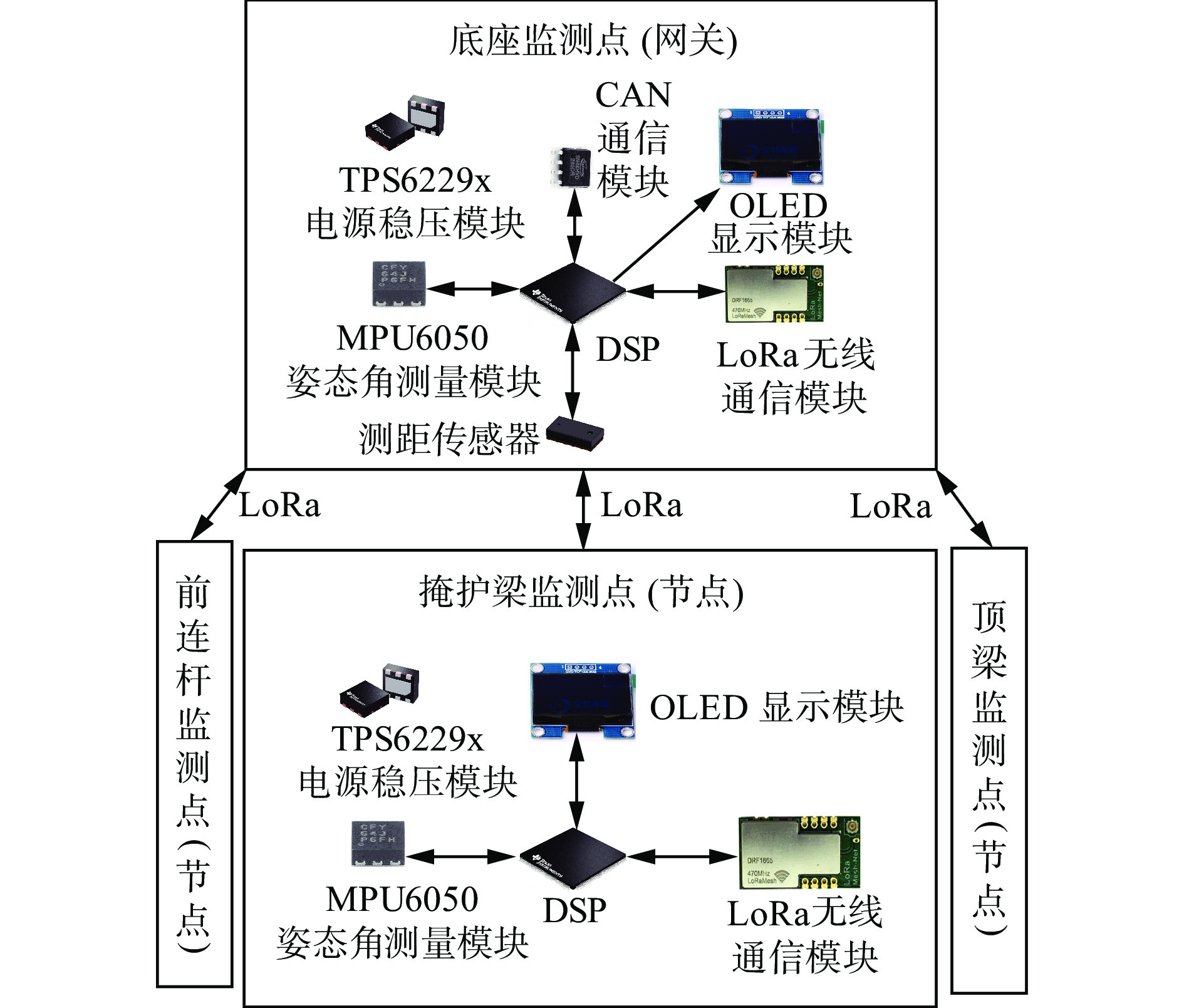
-
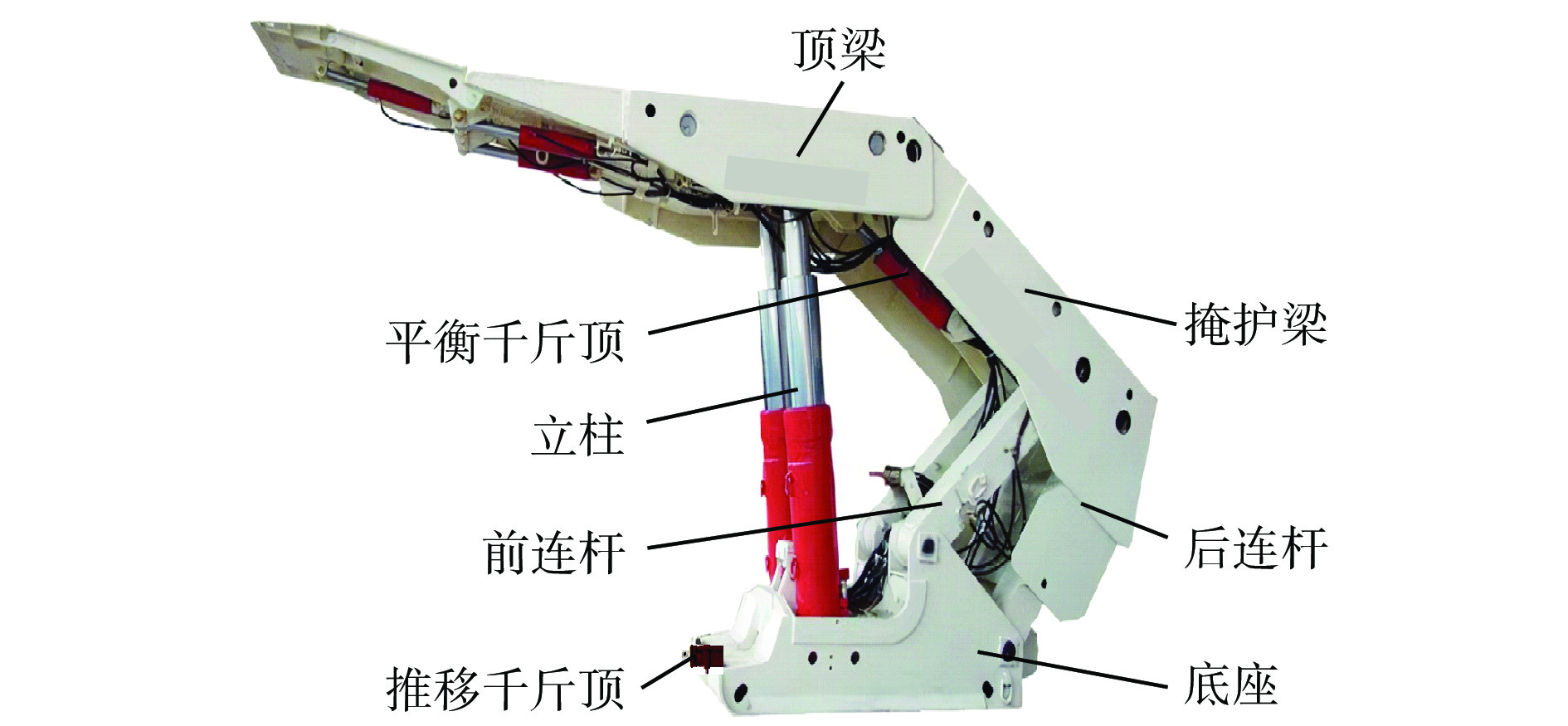
摘要: 针对现有液压支架姿态监测方法测量参数不全面、精度和可靠性不高、工况环境适应性差等问题,提出一种直接测量与间接测量相结合的液压支架关键姿态参数测量系统,研制了以DSP为核心、以MEMS惯导为测量元件、具备LoRa无线通信功能的姿态传感器。分析得出了影响液压支架支护姿态的关键参数,其中底座、前连杆、掩护梁和顶梁与水平面夹角及推移步距采用直接测量方式,支护高度、立柱与平衡千斤顶长度采用间接测量方式。该系统包括安装于底座、前连杆、掩护梁、顶梁处的4个姿态传感器和1个安装于底座的红外激光测距传感器,采用LoRa无线通信方式组网。底座处的姿态传感器作为网关(即网关传感器),用于测量底座与水平面的夹角,控制红外激光测距传感器测量推移步距,并解算支护高度、立柱长度和平衡千斤顶长度;其他3处的姿态传感器作为节点(即节点传感器),用于测量前连杆、掩护梁和顶梁与水平面的夹角,并将获得的角度信息上报至网关传感器。测试结果表明,姿态角测量的最大绝对误差为0.2°,支护高度、立柱长度、平衡千斤顶长度测量的最大百分比相对误差分别为0.78%,0.72%,0.83%,推移步距测量的最大绝对误差为1.9 mm。以ZY9000/22/45D型液压支架为例,分析其在不同姿态角范围下的误差分布,得到支护高度最大测量误差为27.4 mm,立柱长度最大测量误差为16.6 mm。Abstract: The existing hydraulic support attitude monitoring methods have the problems of incomplete measurement parameters, low precision and reliability, and poor adaptability to working conditions. In order to solve the above problems, a key attitude parameter measurement system for hydraulic supports is proposed. The system combines direct and indirect measurement. An attitude sensor with DSP as the core, MEMS inertial navigation as the measurement element and with LoRa wireless function, is developed. The key parameters affecting the support attitude of hydraulic supports are analyzed. The parameters include the angle between the base, front connecting rod, cover beam, and top beam and the horizontal plane, as well as the displacement distance, which are directly measured. The support height, column, and balance jack length are indirectly measured. The system includes four attitude sensors installed on the base, front connecting rod, cover beam, and top beam, as well as one infrared laser ranging sensor installed on the base. The system is networked using LoRa wireless communication. The attitude sensor at the base serves is used as a gateway (i.e. gateway sensor) to measure the angle between the base and the horizontal plane, control the infrared laser ranging sensor to measure the displacement distance, and calculate the support height, column length, and balance jack length. The other three attitude sensors are served as nodes (i.e. node sensors) to measure the angle between the front connecting rod, cover beam, and top beam and the horizontal plane, and report the obtained angle information to the gateway sensor. The test results show that the maximum absolute error of attitude angle measurement is 0.2°. The maximum percentage relative errors of support height, column length, and balance jack length measurement are 0.78%, 0.72%, and 0.83%, respectively. The maximum absolute error of displacement step measurement is 1.9 mm. Taking the ZY9000/22/45D hydraulic support as an example, the error distribution under different attitude angle ranges is analyzed. The maximum measurement error of the support height is 27.4 mm, and the maximum measurement error of the column length is 16.6 mm.
-
Key words:
- hydraulic support /
- attitude monitoring /
- attitude sensor /
- infrared laser ranging /
- MEMS /
- LoRa
-

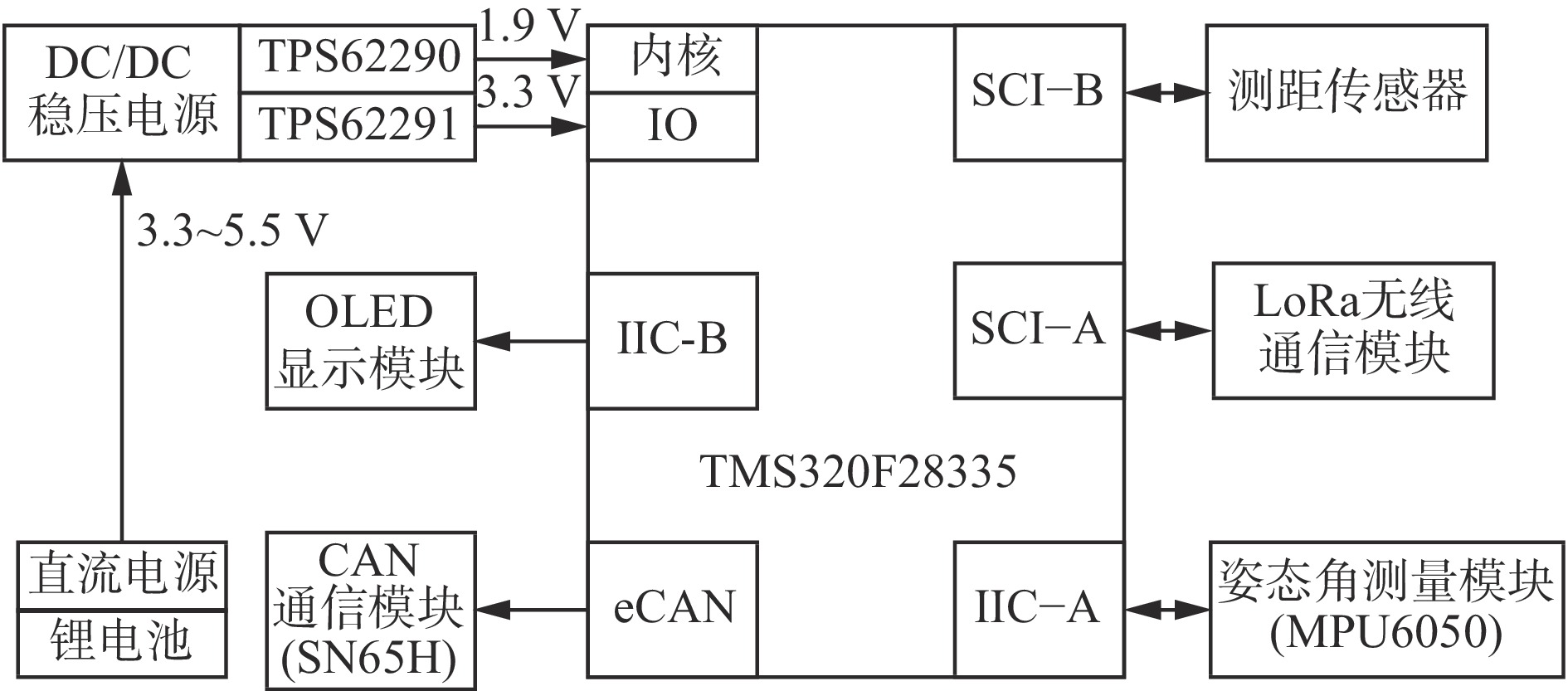
图 3 液压支架关键姿态参数测量系统硬件组成
Figure 3. Hardware composition of the key attitude parameter measurement system for hydraulic supports

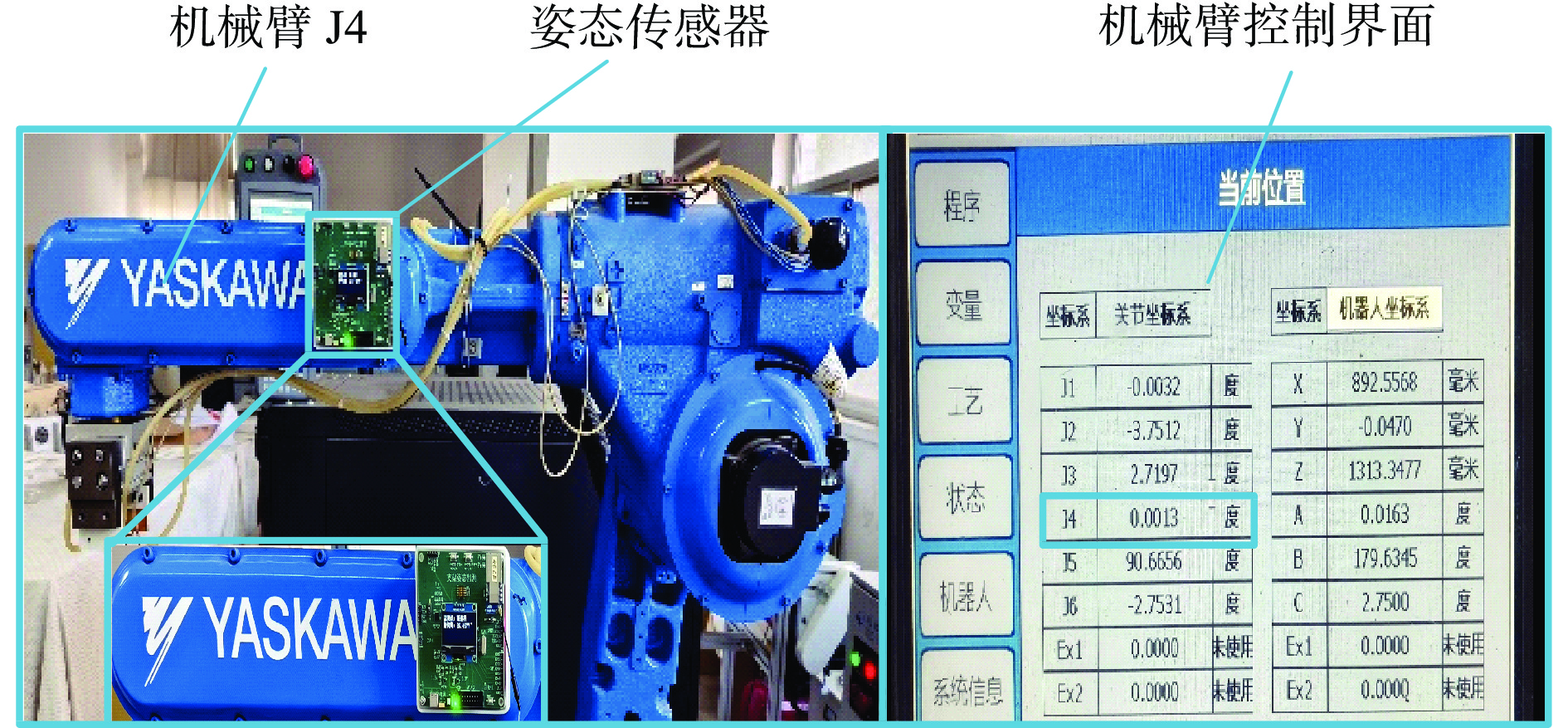
图 7 姿态传感器角度测量精度测试平台
Figure 7. Experimental platform for angle measurement accuracy of attitude sensor

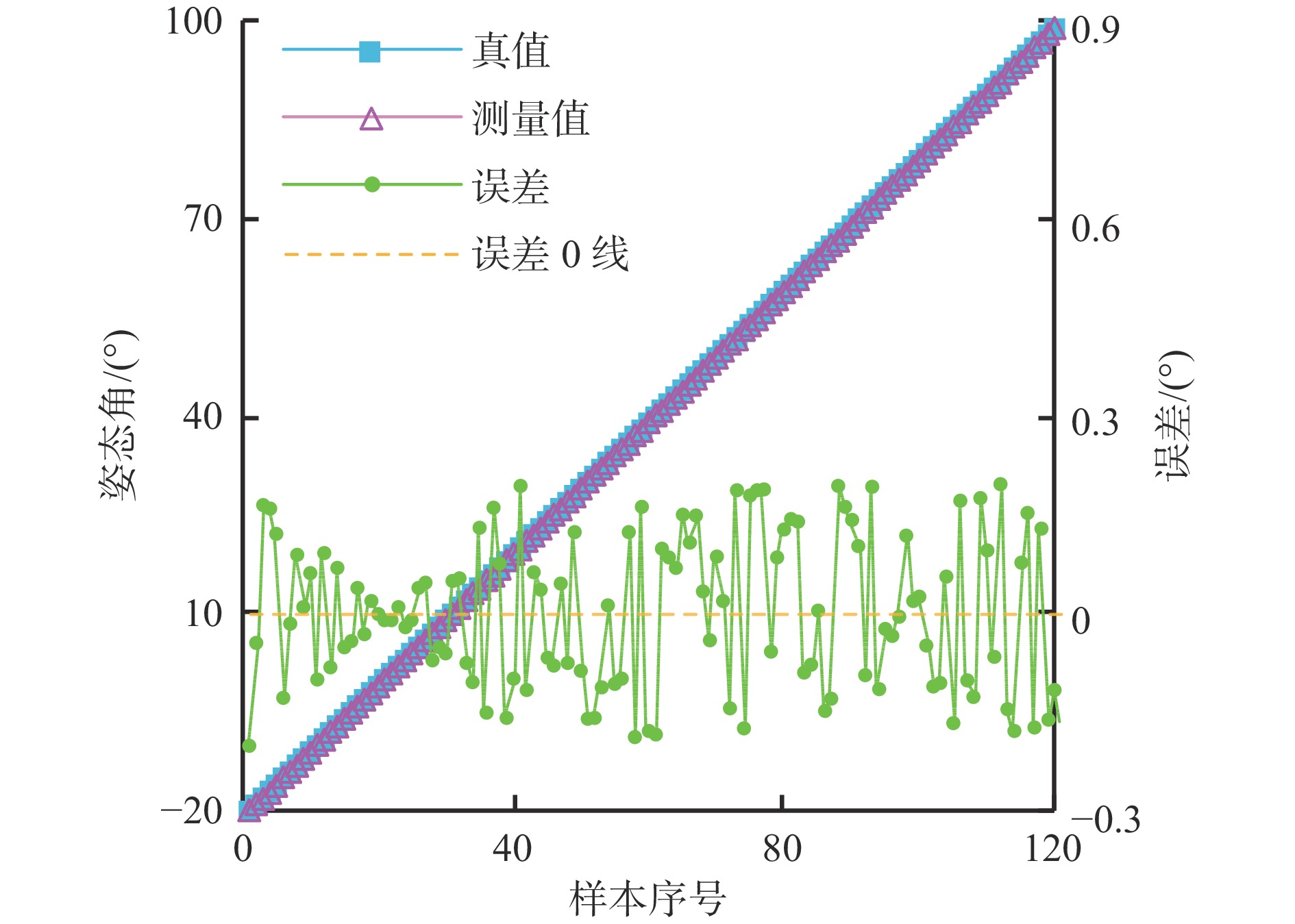
图 8 姿态传感器角度测量精度测试结果
Figure 8. Experimental results of angle measurement accuracy of attitude sensor

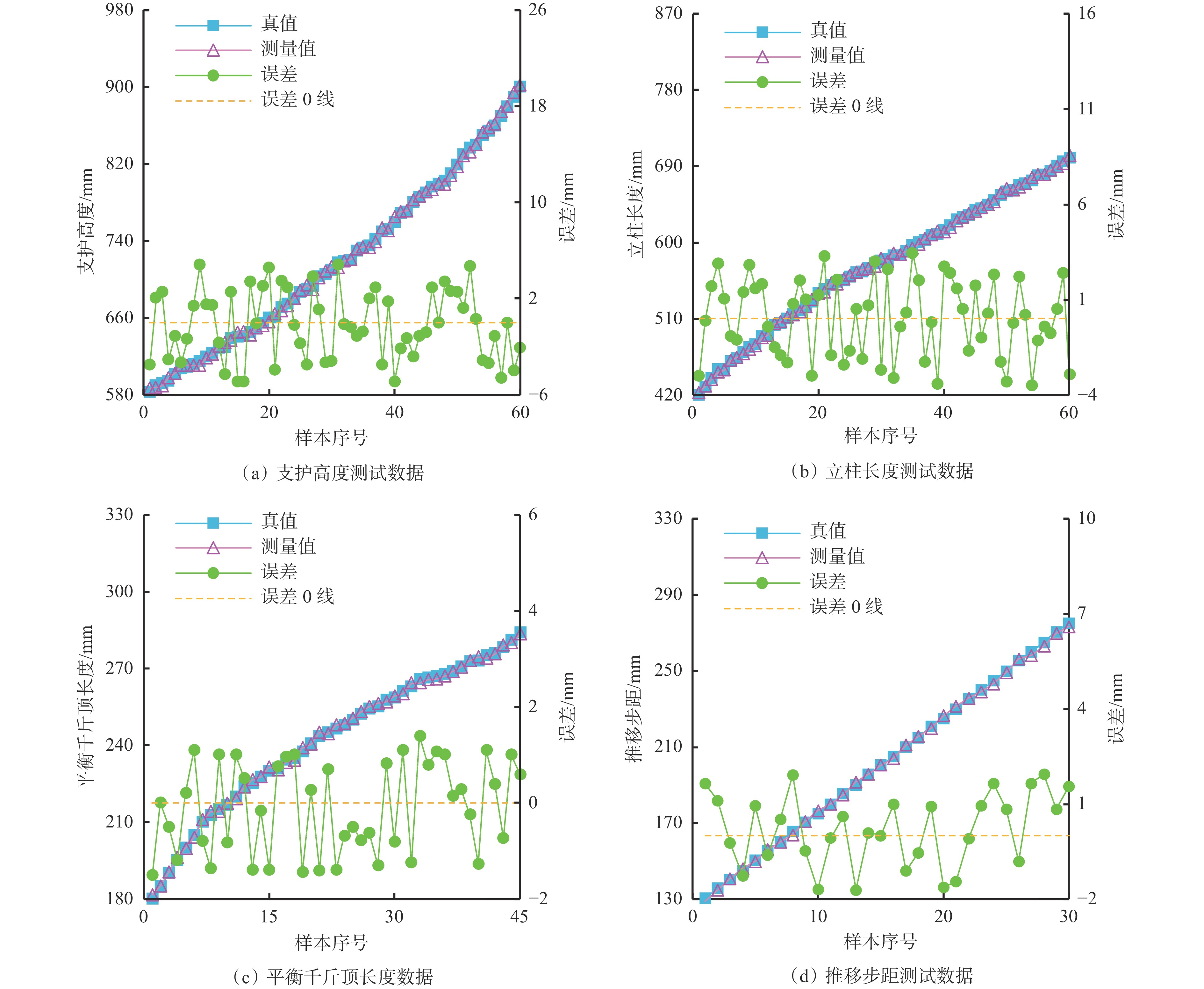
图 10 液压支架姿态参数测量数据及误差分布
Figure 10. Measurement data and error distribution of hydraulic support attitude parameters

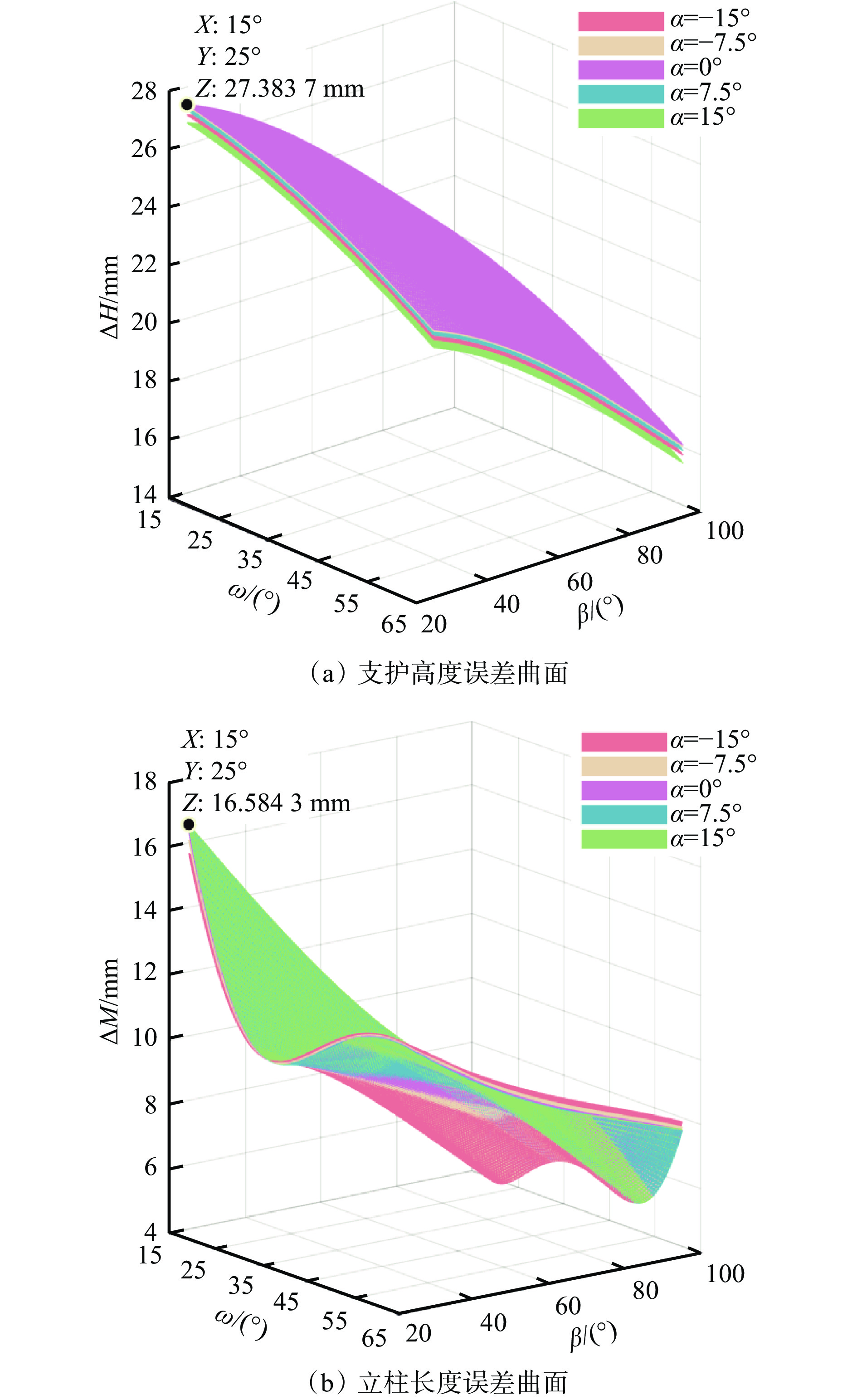
图 11 支护高度与立柱长度误差曲面
Figure 11. Curved surface of support height error and column length error
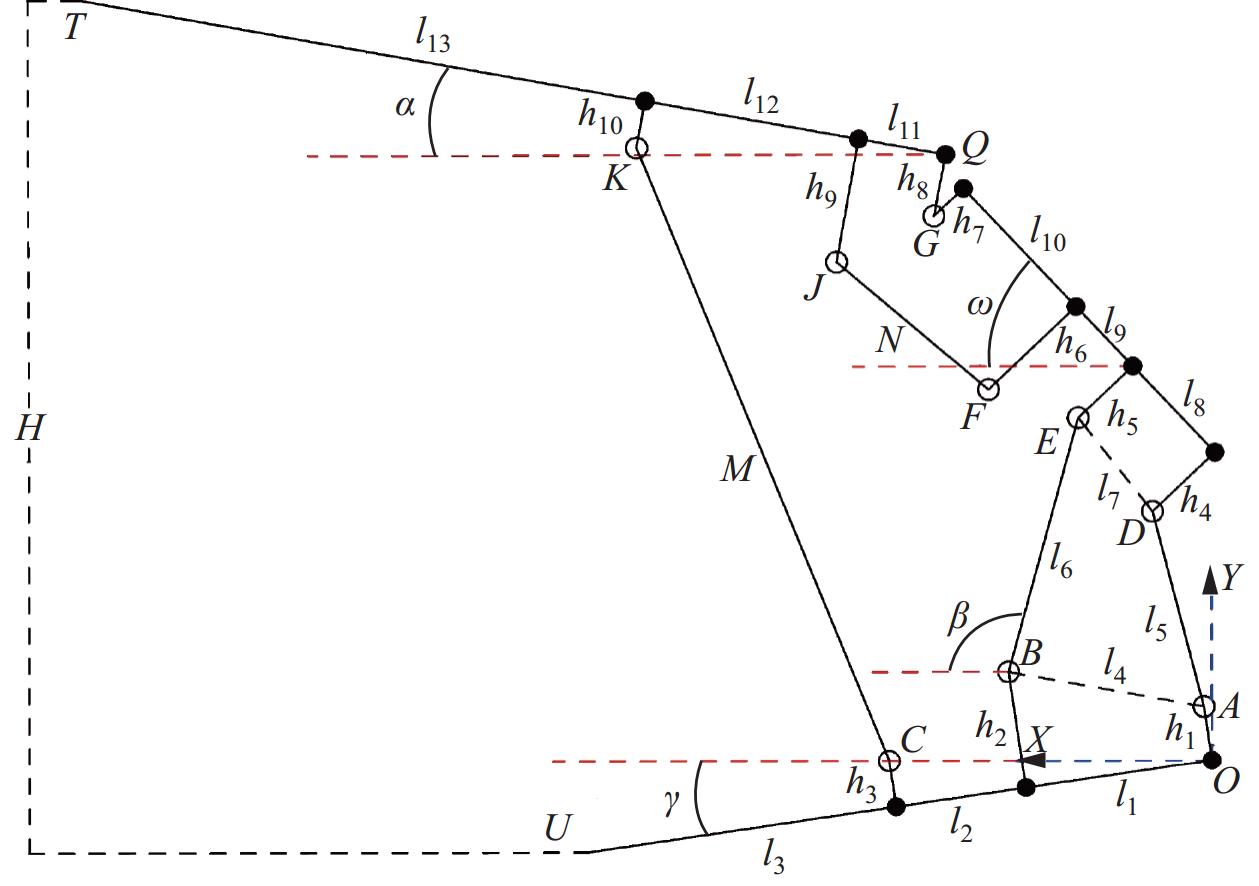
表 1 液压支架测试平台尺寸参数
Table 1. Dimensional parameters of hydraulic support experimental platform
mm 变量 值 变量 值 变量 值 变量 值 $ {l}_{1} $ 450 $ {l}_{7} $ 286 $ {l}_{13} $ 1 370 $ {h}_{6} $ 289 $ {l}_{2} $ 313 $ {l}_{8} $ 285 $ {h}_{1} $ 131 $ {h}_{7} $ 96 $ {l}_{3} $ 742 $ {l}_{9} $ 197 $ {h}_{2} $ 282 $ {h}_{8} $ 150 $ {l}_{4} $ 484 $ {l}_{10} $ 391 $ {h}_{3} $ 114 $ {h}_{9} $ 300 $ {l}_{5} $ 475 $ {l}_{11} $ 211 $ {h}_{4} $ 206 $ {h}_{10} $ 114 $ {l}_{6} $ 632 $ {l}_{12} $ 519 $ {h}_{5} $ 180  下载: 导出CSV
下载: 导出CSV
表 2 测试误差统计分析结果
Table 2. Experimental error statistical analysis results
参数 ∆e $ \overline{e} $ $ \sigma $ $ \Delta R$/% $ \overline{R} $/% θ 0.2° 0.1° 0.06 1.00 0.39 H 4.9 mm 2.5 mm 1.40 0.78 0.35 M 3.5 mm 1.7 mm 1.00 0.72 0.31 N 1.5 mm 0.9 mm 0.40 0.83 0.36 S 1.9 mm 0.2 mm 0.90 1.27 0.98
下载: 导出CSV
表 3 ZY9000/22/45D型液压支架尺寸参数
Table 3. Dimensional parameters of ZY9000/22/45D hydraulic support
mm 变量 值 变量 值 变量 值 变量 值 $ {l}_{1} $ 850 $ {l}_{7} $ 525 $ {l}_{13} $ 2910 $ {h}_{6} $ 540 $ {l}_{2} $ 850 $ {l}_{8} $ 525 $ {h}_{1} $ 350 $ {h}_{7} $ 150 $ {l}_{3} $ 1080 $ {l}_{9} $ 940 $ {h}_{2} $ 920 $ {h}_{8} $ 150 $ {l}_{4} $ 1023 $ {l}_{10} $ 1160 $ {h}_{3} $ 280 $ {h}_{9} $ 560 $ {l}_{5} $ 1845 $ {l}_{11} $ 235 $ {h}_{4} $ 215 $ {h}_{10} $ 390 $ {l}_{6} $ 1940 $ {l}_{12} $ 930 $ {h}_{5} $ 215
下载: 导出CSV
-
[1] 杜毅博. 液压支架支护状况获取与模糊综合评价方法[J]. 煤炭学报,2017,42(增刊1):260-266.DU Yibo. Supporting condition acquisition and fuzzy comprehensive evaluation method for hydraulic support[J]. Journal of China Coal Society,2017,42(S1):260-266. [2] LIANG Minfu,FANG Xinqiu,LI Shuang,et al. A fiber Bragg grating tilt sensor for posture monitoring of hydraulic supports in coal mine working face[J]. Measurement,2019,138:305-303. doi: 10.1016/j.measurement.2019.02.060 [3] 马旭东,许春雨,宋建成. 综采工作面液压支架姿态监测系统设计[J]. 煤炭技术,2019,38(7):174-177.MA Xudong,XU Chunyu,SONG Jiancheng. Design of attitude monitoring system for hydraulic support in fully mechanized face[J]. Coal Technology,2019,38(7):174-177. [4] 张坤,廉自生. 液压支架姿态角度测量系统[J]. 工矿自动化,2017,43(5):40-45.ZHANG Kun,LIAN Zisheng. Attitude angle measuring system of hydraulic support[J]. Industry and Mine Automation,2017,43(5):40-45. [5] 马盟. 基于光纤传感技术的液压支架姿态监测研究[D]. 徐州:中国矿业大学,2018.MA Meng. Research on posture monitoring of hydraulic supports based on optical fiber sensing technology[D]. Xuzhou:China University of Mining and Technology,2018. [6] 张旭辉,王冬曼,杨文娟. 基于视觉测量的液压支架位姿检测方法[J]. 工矿自动化,2019,45(3):56-60.ZHANG Xuhui,WANG Dongman,YANG Wenjuan. Position detection method of hydraulic support based on vision measurement[J]. Industry and Mine Automation,2019,45(3):56-60. [7] 韩哲,杜毅博,任怀伟,等. 基于LoRaWAN的液压支架状态监测系统[J]. 工矿自动化,2020,46(8):89-93,100.HAN Zhe,DU Yibo,REN Huaiwei,et al. Hydraulic support condition monitoring system based on LoRaWAN[J]. Industry and Mine Automation,2020,46(8):89-93,100. [8] 任怀伟,李帅帅,赵国瑞,等. 基于深度视觉原理的工作面液压支架支撑高度与顶梁姿态角测量方法研究[J]. 采矿与安全工程学报,2022,39(1):72-81,93.REN Huaiwei,LI Shuaishuai,ZHAO Guorui,et al. Measurement method of support height and roof beam posture angles for working face hydraulic support based on depth vision[J]. Journal of Mining & Safety Engineering,2022,39(1):72-81,93. [9] 欧阳敏,杨斐文. 基于FreeRTOS和Modbus的新型液压支架姿态监测系统设计[J]. 煤炭技术,2022,41(9):185-188.OUYANG Min,YANG Feiwen. Design of new hydraulic support attitude monitoring system based on FreeRTOS and Modbus[J]. Coal Technology,2022,41(9):185-188. [10] 雷晓瑜,曹广忠. TMS320F28335及其最小应用系统设计[J]. 电子设计工程,2009,17(1):91-92,95.LEI Xiaoyu,CAO Guangzhong. Design of TMS320F28335 and its minimum application system[J]. Electronic Design Engineering,2009,17(1):91-92,95. [11] KIM J-Y,KWON S-W,PARK S,et al. A MEMS-based commutation modulewith vibration sensor for wireless sensor network-based tunnel-blas-ting monitoring[J]. KSCE Journal of Civil Engineering,2013,17(7):1644-1653. doi: 10.1007/s12205-013-0108-4 [12] XIONG Jianping. The design of windsurfing control system basedon SCA100T-D02 inclinometer[C]. The 2nd International Conference on Consumer Electronics,Communications and Networks,Yichang,2012:649-651. [13] 王莹,杨志良. 基于LoRa技术的煤矿单体液压支柱监测终端[J]. 煤炭技术,2023,42(11):249-251.WANG Ying,YANG Zhiliang. Monitoring terminal of single hydraulic prop in coal mine based on LoRa technology[J]. Coal Technology,2023,42(11):249-251. [14] ZHANG Yunfan,LI Hui,SHEN Shengnan,et al. Investigation of acoustic injection on the MPU6050 accelerometer[J]. Sensors,2019,19(14). DOI: 10.3390/s19143083. [15] 金静飞. 液压支架电液控制系统测试平台关键技术研究[D]. 徐州:中国矿业大学,2015.JIN Jingfei. Research on key technologies of hydraulic support electro-hydraulic control system test platform[D]. Xuzhou:China University of Mining and Technology,2015. [16] 李和深. 基于Modbus协议煤矿液压支架用磁致伸缩位移传感器设计[D]. 广州:华南理工大学,2017.LI Heshen. Design of magnetostrictive displacement sensor for coal mine hydraulic support based on Modbus protocol[D]. Guangzhou:South China University of Technology,2017. [17] TANESKI F,GYONGY I,ABBAS T A ,et al. Guided direct time-of-flight lidar using stereo cameras for enhanced laser power efficiency[J]. Sensors,2023,23(21). DOI: 10.3390/s23218943. [18] WAN Chenggong,LI Jinwen,LIU Gaolong,et al. A low-power DTOF image sensor with double-frame-multiplexing mode for long-range detection[J]. Measurement,2023,214. DOI: 10.1016/j.measurement.2023.112801. [19] GB/T 3836.4—2021爆炸性环境 第4部分:由本质安全型“i”保护的设备[S].GB/T 3836.4-2021 Explosive atmospheres-Part 4:Equipment protection by intrinsic safety "i"[S]. [20] GB/T 3836.18—2017爆炸性环境 第18部分:本质安全电气系统[S].GB/T 3836.18-2017 Explosive atmospheres-Part 18:Intrinsically safe electrical systems[S]. [21] 姚雪峰. 液压支架四连杆机构的近似直线机构设计[J]. 煤炭技术,2002,21(6):2-4.YAO Xuefeng. Design on approximate straight line mechanism of the pantograph structure of hydraulic support[J]. Coal Technology,2002,21(6):2-4. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 146
- HTML全文浏览量: 36
- PDF下载量: 18
- 被引次数: 0
