

Speed synchronization control method for multi motor drive system of belt conveyor
-
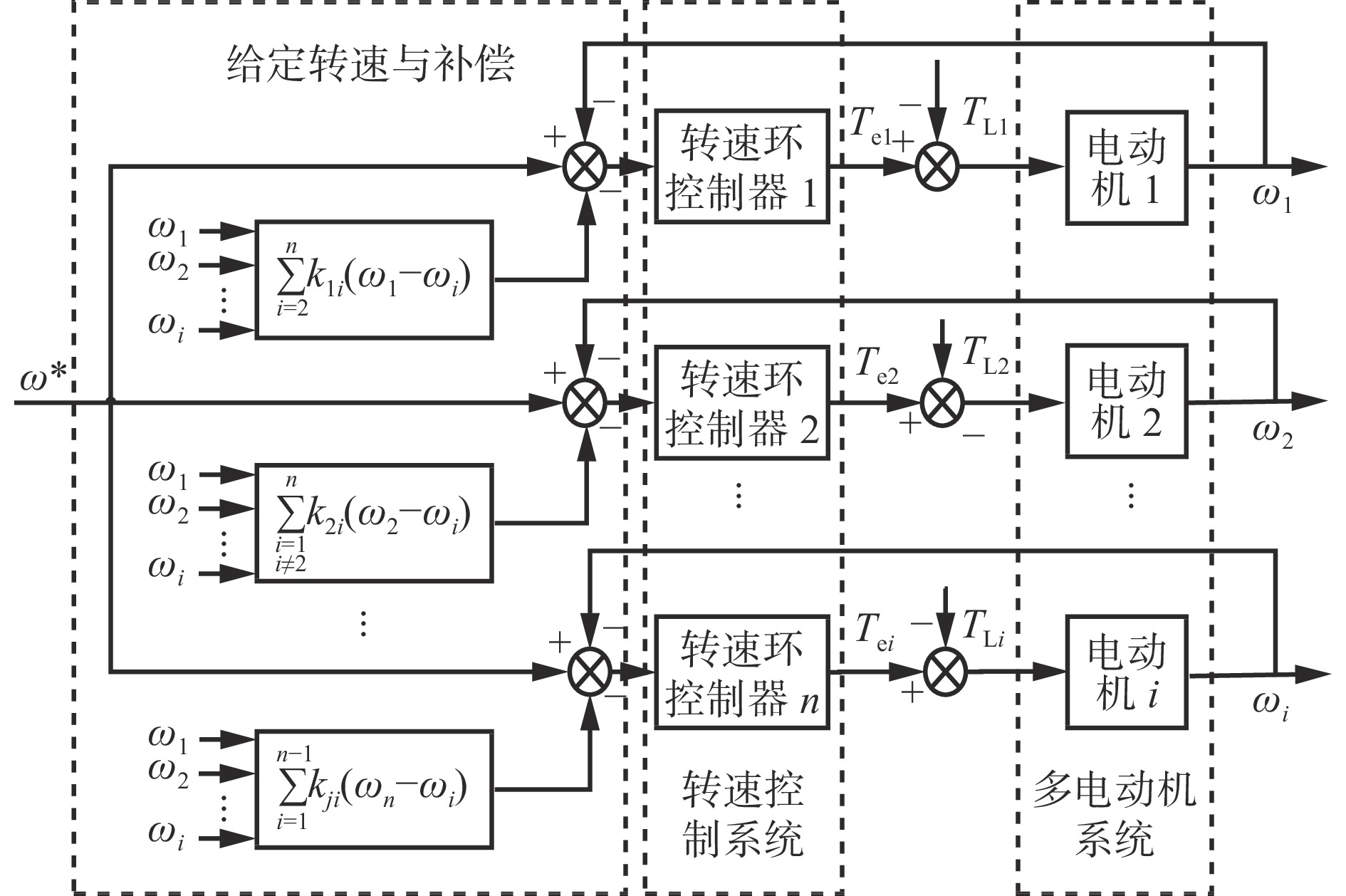
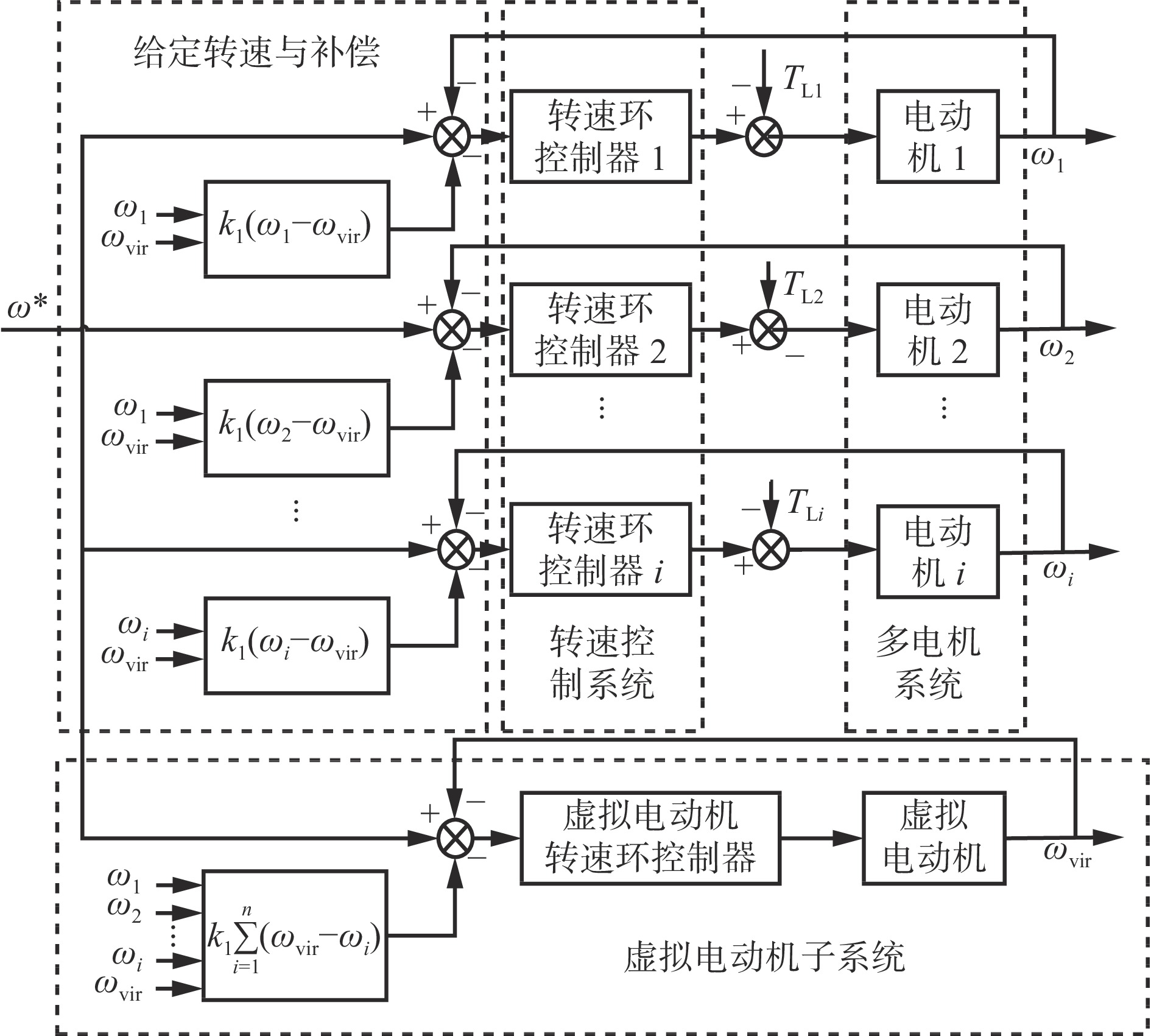
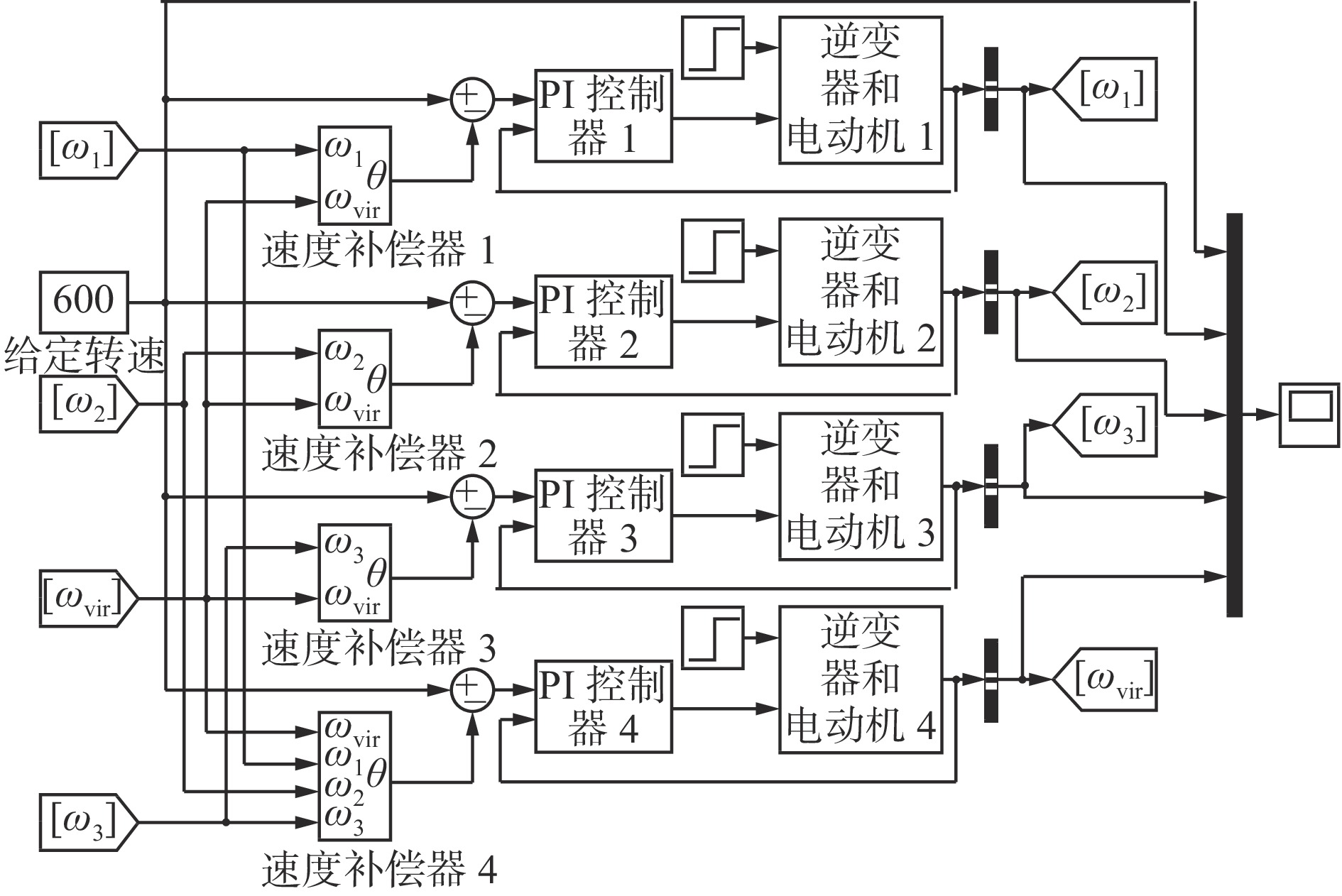
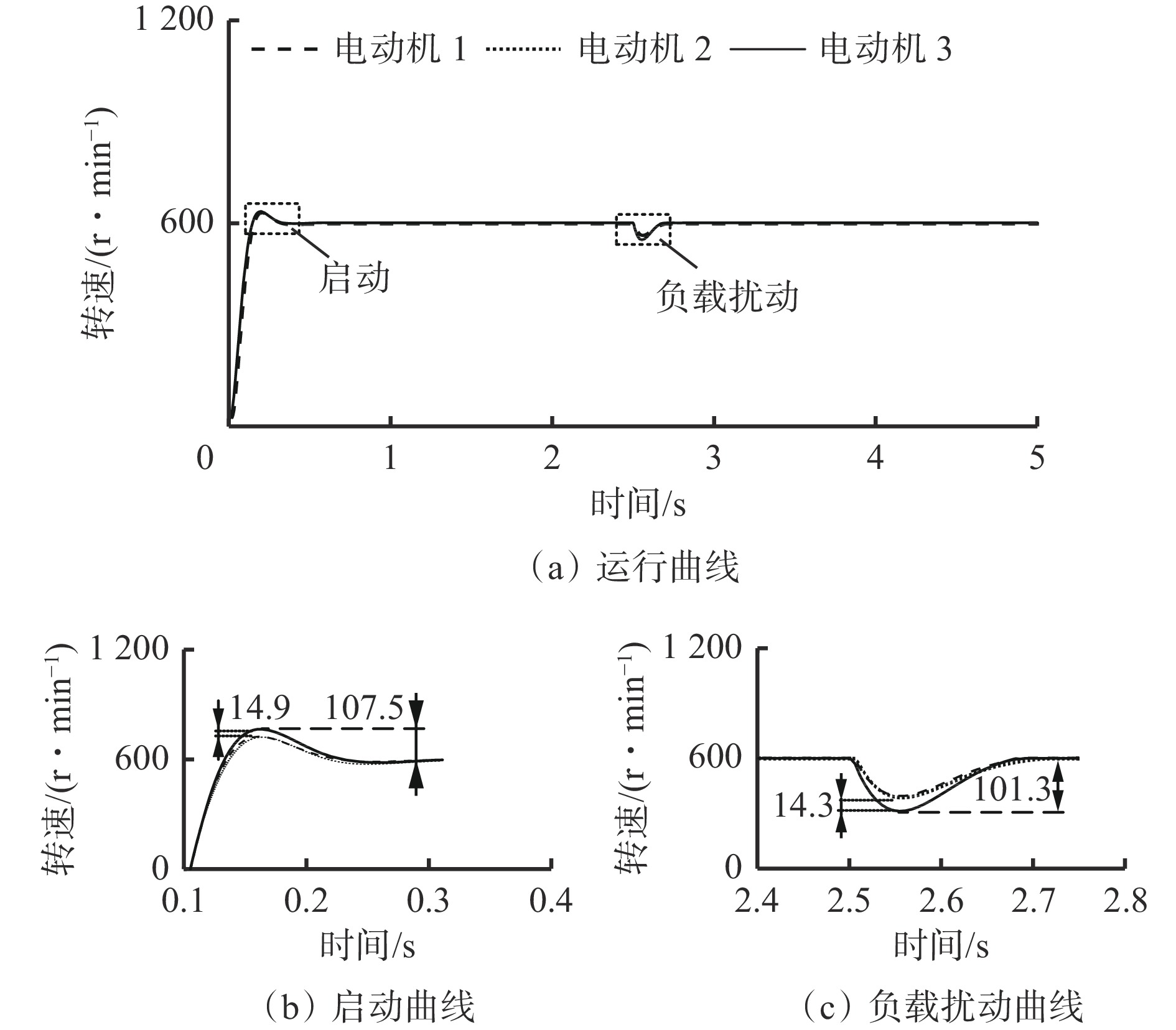
摘要: 带式输送机多电动机驱动系统在生产过程中,如果发生个别电动机转速不同步现象,会造成输送带断裂及机电设备损坏,因此需要对带式输送机多电动机驱动系统进行转速协同控制。传统的偏差耦合控制方法具备较好的综合性能,但存在控制结构复杂、扩展能力差、启动及稳态运行过程中易受负载扰动导致转速偏差等问题。针对上述问题,提出一种带式输送机多电动机驱动系统转速同步控制方法。通过引入虚拟电动机,采用各电动机与虚拟电动机之间的间接耦合关系替代传统偏差耦合结构中电动机之间的直接耦合关系,简化了系统的同步补偿器模型,减小了各电动机间的同步偏差,实现了各电动机的同步控制。当电动机数量变化时,只需在虚拟电动机转速同步补偿器中加入新的转速变量即可,原系统的转速同步补偿器无需改变,增强了系统可扩展性能。分析结果表明:① 系统启动阶段,改进偏差耦合结构中刚性连接与柔性连接电动机之间具备较好的同步性能。与传统偏差耦合结构相比,刚性连接电动机之间的同步偏差减少了4.0 r/min,使启动过程中主驱动滚筒具备良好的初始动力。② 负载突变时,刚性连接电动机之间的同步偏差为1.7 r/min,刚性与柔性连接电动机之间的同步偏差平均值为14.6 r/min,比传统耦合偏差结构分别降低了5.2,31.7 r/min,可有效降低负载突变对电动机机械结构的损伤。Abstract: In the production process of a multi motor drive system of belt conveyor, if individual motor speeds are not synchronized, it can cause conveyor belt breakage and mechanical and electrical equipment damage. Therefore, it is necessary to carry out speed collaborative control on the multi motor drive system of belt conveyors. The traditional deviation coupling control method has good comprehensive performance. But it has problems such as complex control structure, poor scalability, and susceptibility to load disturbances during startup and steady-state operation, resulting in speed deviation. In order to solve the above problems, a speed synchronization control method for multi motor drive system of belt conveyor is proposed. By introducing virtual motors, and adopting indirect coupling relationships between each motor and virtual motors instead of direct coupling relationships between motors in traditional deviation coupling structures, the synchronous compensator model of the system is simplified. The synchronous error between each motor is reduced, and the synchronous control of each motor is achieved. When the number of motors changes, only new speed variables need to be added to the virtual motor speed synchronous compensator. The speed synchronous compensator of the original system does not need to be changed, enhancing the system's scalability performance. The analysis results show the following points. ① During the system startup stage, the improved deviation coupling structure has good synchronization performance between the rigid and flexible connected motors. Compared with traditional deviation coupling structures, the synchronization error between rigidly connected motors is reduced by 4.0 r/min, providing good initial power for the main drive drum during start-up. ② When the load suddenly changes, the synchronization error between rigid connected motors is 1.7 r/min. The average synchronization error between the rigid and flexible connected motors is 14.6 r/min, which is 5.2, 31.7 r/min lower than the traditional coupling deviation structure, respectively. This can effectively reduce the damage to the mechanical structure of the motor caused by the load sudden change.
-
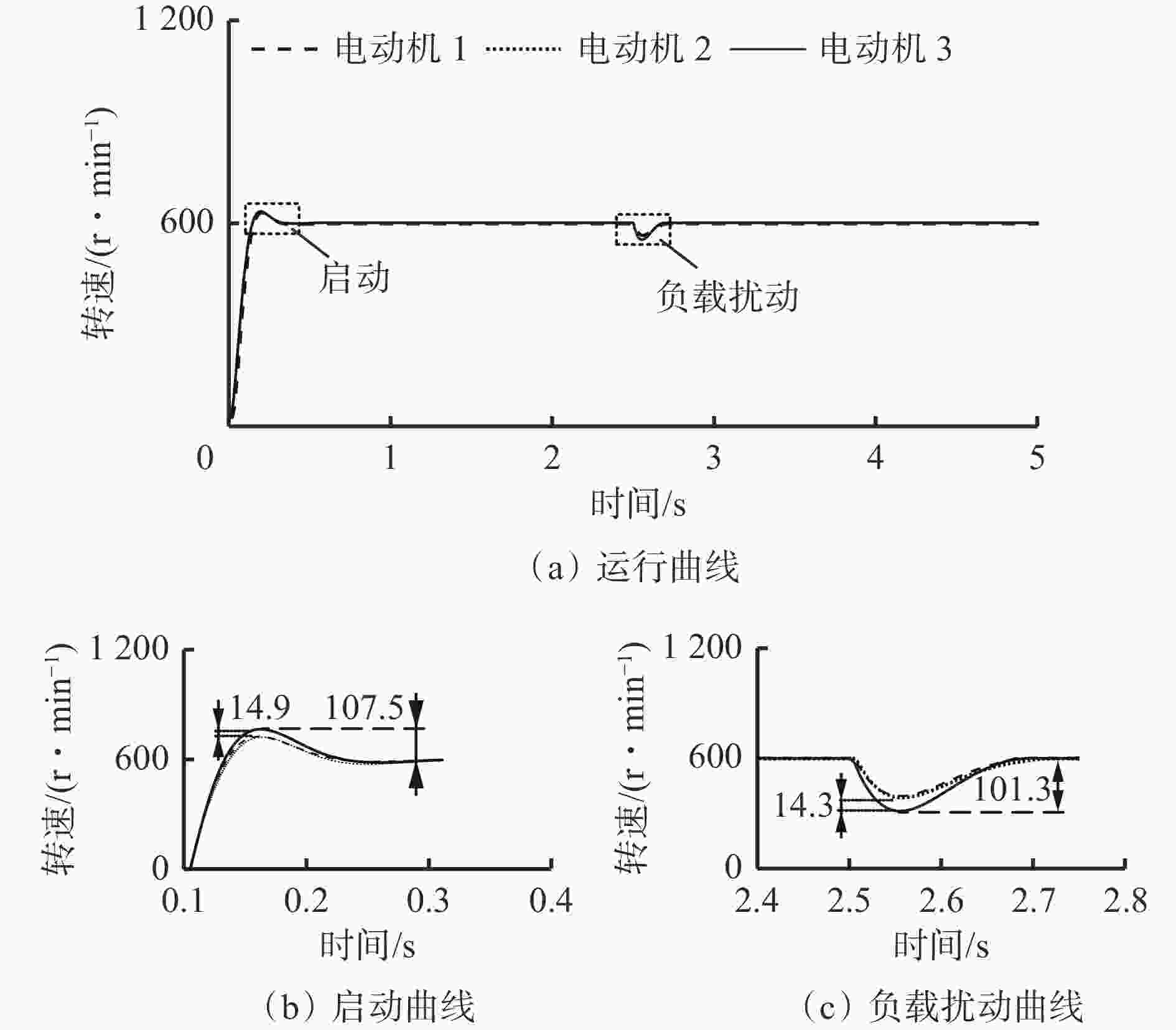
图 8 改进偏差耦合结构的跟踪偏差
Figure 8. Tracking error of the improved deviation coupling structure
表 1 PMSM主要仿真设计参数
Table 1. Main simulation design parameters of PMSM
参数 取值 Rs/Ω 2.875 Ld/mH 0.85 Lq/mH 0.85 Ψf/Wb 0.175 J/(kg·m2) 0.825×10−3 Jvir/(kg·m2) 7.425×10−3 Pn 2 TN/(r·min−1) 600  下载: 导出CSV
下载: 导出CSV
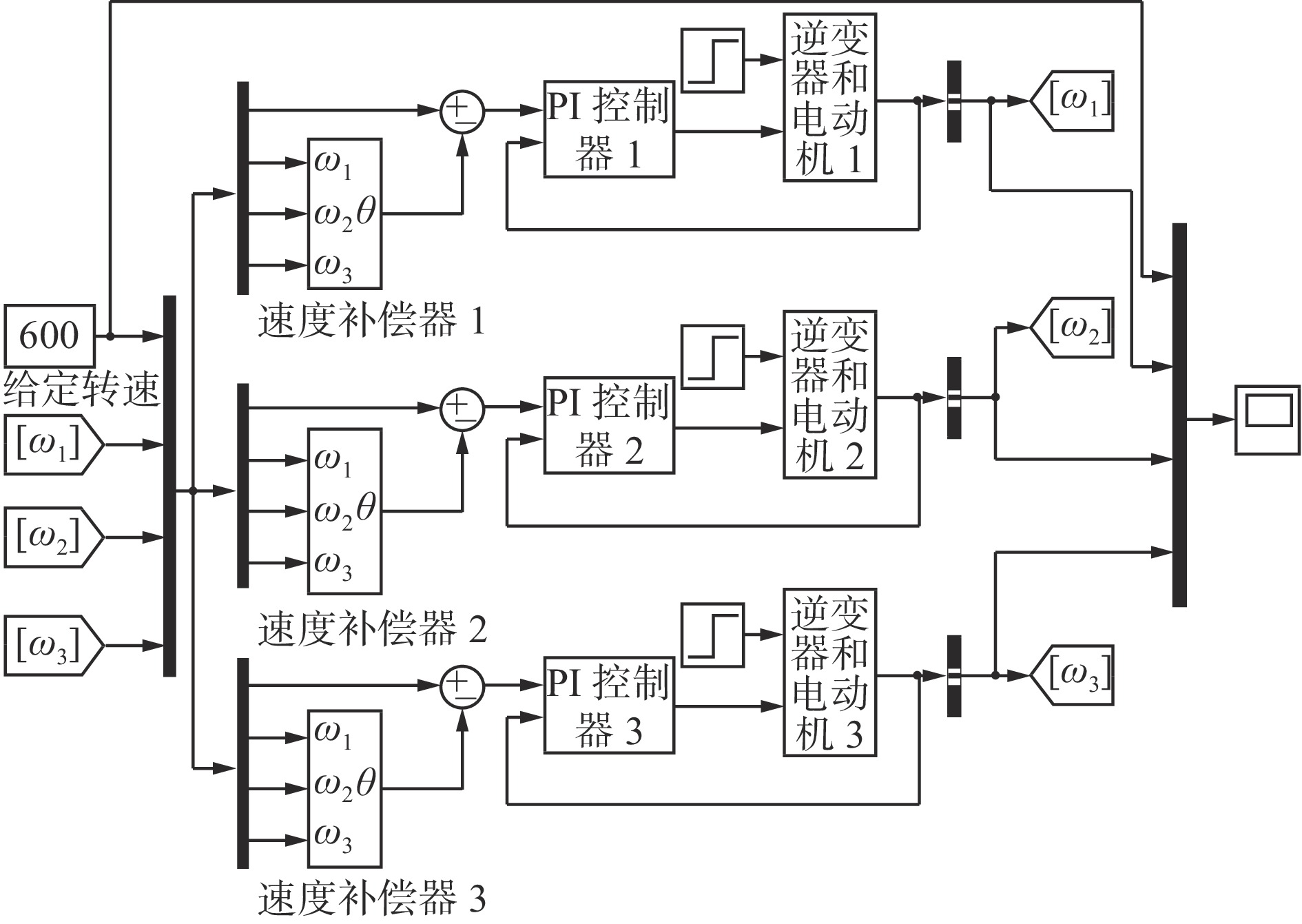
表 2 传统偏差耦合结构启动过程跟踪偏差
Table 2. Process tracing error of traditional deviation coupling structure initiation
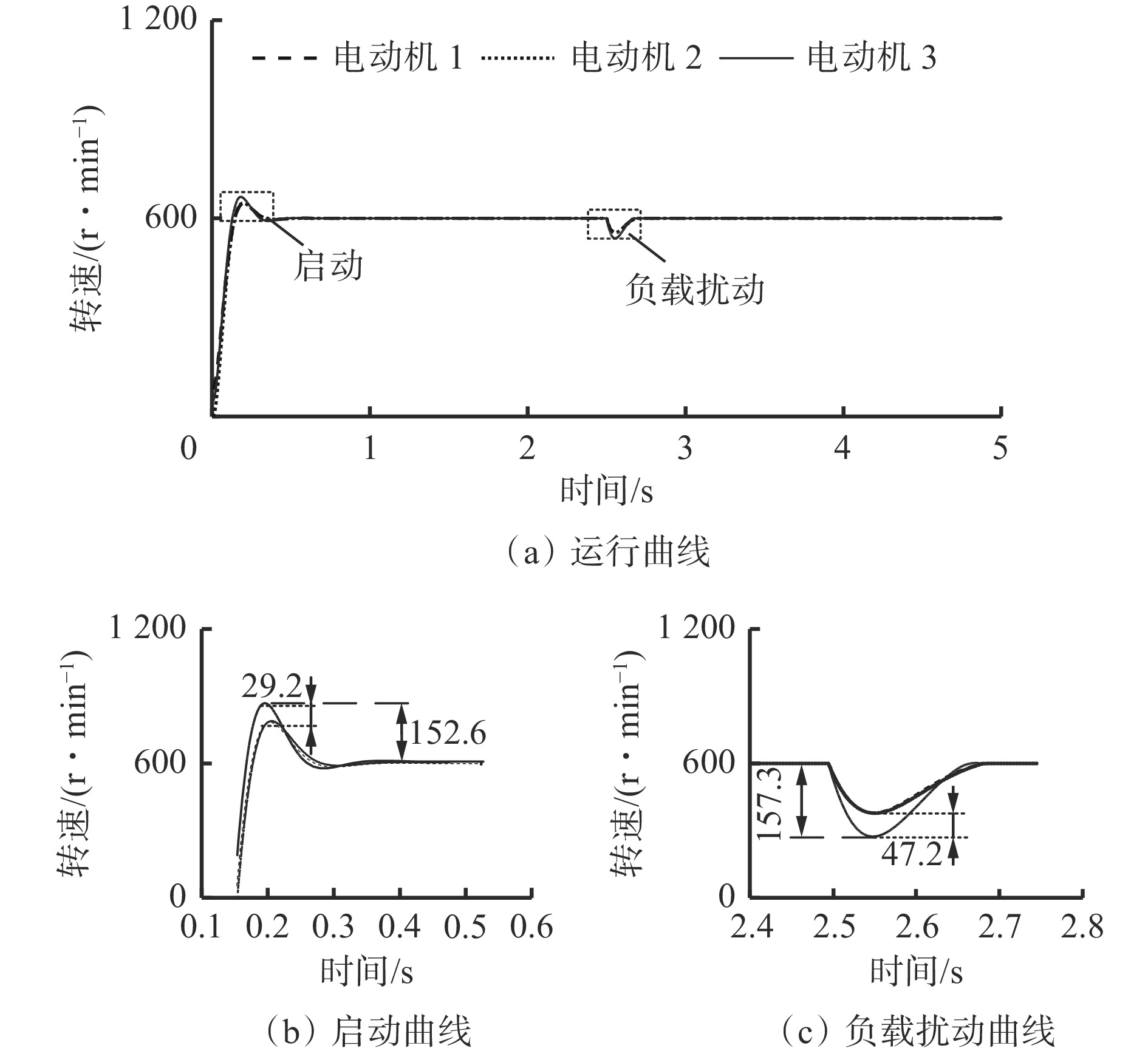
偏差类型 τ1 τ2 τ3 τ12 τ13 τ23 转速/(r·min−1) 117.9 118.3 152.6 5.2 28.6 29.2
下载: 导出CSV
表 3 传统偏差耦合结构负载突变过程跟踪偏差
Table 3. Traditional deviation coupling structure load mutation process trace error
偏差类型 τ1 τ2 τ3 τ12 τ13 τ23 转速(r·min−1) 109.6 110.2 157.3 6.9 45.4 47.2
下载: 导出CSV
表 4 改进偏差耦合结构启动过程跟踪偏差
Table 4. Process trace error of improved deviation coupling structure initiation
偏差类型 τ1 τ2 τ3 τ12 τ13 τ23 转速/(r·min−1) 90.4 89.2 107.5 1.2 14.1 14.9
下载: 导出CSV
表 5 改进偏差耦合结构负载突变过程跟踪偏差
Table 5. Improved deviation coupling structure load mutation process trace error
偏差类型 τ1 τ2 τ3 τ12 τ13 τ23 转速/(r·min−1) 85.8 84.7 101.3 1.7 14.9 14.3
下载: 导出CSV
-
[1] 王忠鑫,辛凤阳,陈洪亮,等. 我国露天矿智能运输技术现状及发展趋势[J]. 工矿自动化,2022,48(6):15-26.WANG Zhongxin,XIN Fengyang,CHEN Hongliang,et al. Current status and development trend of intelligent transportation technology in China's open-pit mines[J]. Journal of Mine Automation,2022,48(6):15-26. [2] 吴文臻,程继明,李标. 矿用带式输送机托辊音频故障诊断方法[J]. 工矿自动化,2022,48(9):25-32.WU Wenzhen,CHENG Jiming,LI Biao. Audio fault diagnosis method of mine belt conveyor roller[J]. Journal of Mine Automation,2022,48(9):25-32. [3] 杨祥,田慕琴,李璐,等. 矿用带式输送机驱动滚筒轴承振动信号降噪方法[J]. 工矿自动化,2019,45(3):66-70.YANG Xiang,TIAN Muqin,LI Lu,et al. Vibration signal denoising method for drive roller bearing of mine-used belt conveyor[J]. Industry and Mine Automation,2019,45(3):66-70. [4] 程国栋,吴玮. 矿井带式输送机多电动机同步控制技术[J]. 工矿自动化,2021,47(12):81-86,127.CHENG Guodong,WU Wei. Multi-motor synchronous control technology of mine belt conveyor[J]. Industry and Mine Automation,2021,47(12):81-86,127. [5] 王庆龙,张兴,张崇巍. 永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J]. 中国电机工程学报,2014,34(6):897-902.WANG Qinglong,ZHANG Xing,ZHANG Chongwei. Double sliding-mode model reference adaptive system speed identification for vector control of permanent magnet synchronous motors[J]. Proceedings of the CSEE,2014,34(6):897-902. [6] 陆婋泉,林鹤云,韩俊林. 永磁同步电机的扰动观测器无位置传感器控制[J]. 中国电机工程学报,2016,36(5):1387-1394.LU Xiaoquan,LIN Heyun,HAN Junlin. Position sensorless control of permanent magnet synchronous machine using a disturbance observer[J]. Proceedings of the CSEE,2016,36(5):1387-1394. [7] 韩仁银,郭阳宽,祝连庆,等. 多电机同步控制综述[J]. 电机与控制应用,2017,44(6):8-122.HAN Renyin,GUO Yangkuan,ZHU Lianqing,et al. Review of multi-motor synchronization control[J]. Electric Machines & Control Application,2017,44(6):8-122. [8] 祁晓阳,于少娟. 基于积分滑模变结构的双轴伺服电机同步控制[J]. 太原科技大学学报,2017,38(2):83-87.QI Xiaoyang,YU Shaojuan. Biaxial servo motor synchronous control based on variable structure controller with integral sliding mode[J]. Journal of Taiyuan University of Science and Technology,2017,38(2):83-87. [9] 武国平,闫孝姮. 矿用电缆卷放车电动机交叉耦合控制方法[J]. 工矿自动化,2020,46(9):88-93.WU Guoping,YAN Xiaoheng. Cross-coupling control method for motor of mine cable winding car[J]. Industry and Mine Automation,2020,46(9):88-93. [10] 胡松钰,钱松,吴伟,等. 相邻交叉耦合直线开关磁阻电机位置同步控制[J]. 中国电机工程学报,2017,37(23):7024-7031,7094.HU Songyu,QIAN Song,WU Wei,et al. Position synchronization control for linear switch reluctance motor based on adjacent cross-coupling[J]. Proceedings of the CSEE,2017,37(23):7024-7031,7094. [11] BARTON K L,ALLEYNE A G. A cross-coupled iterative learning control design for precision motion control[J]. IEEE Transactions on Control Systems Technology,2008,16(6):1218-1231. doi: 10.1109/TCST.2008.919433 [12] 陈虹丽,马国豪,李强. 基于单片机的步进电机升降速并行控制[J]. 实验技术与管理,2018,35(7):83-85.CHEN Hongli,MA Guohao,LI Qiang. Parallel control of ascending and descending speed of stepping motor based on SCM[J]. Experimental Technology and Management,2018,35(7):83-85. [13] 关百军,张秀印. 直流电动机主从控制在重型卧式车床的应用[J]. 制造技术与机床,2014(4):77-78,82.GUAN Baijun,ZHANG Xiuyin. Application of DC motor's master- slave control in heavy- duty lathe[J]. Manufacturing Technology & Machine Tool,2014(4):77-78,82. [14] GU Haiwei, FAN Shaowei, ZHANG Yuanfei, et al. Cross-coupling control of dexterous hand based on neuron networks[C]. International Conference on Mechatronics and Automation, Chengdu, 2012. [15] 胥小勇,孙宇,蒋清海. 改进型相邻耦合结构的多电机比例同步控制[J]. 仪器仪表学报,2012,33(6):1254-1260.XU Xiaoyong,SUN Yu,JIANG Qinghai. Improved adjacent cross-coupling control structure for multi-motor proportional synchronization control[J]. Chinese Journal of Scientific Instrument,2012,33(6):1254-1260. [16] SHI Tingna,LIU Hao,GENG Qiang,et al. An improved relative coupling control structure for multi-motor speed synchronous driving system[J]. IET Electric Power Applications,2016,10(6):451-457. [17] 耿强,王少炜,周湛清,等. 改进型偏差耦合多电机转速同步控制[J]. 电工技术学报,2019,34(3):474-482.GENG Qiang,WANG Shaowei,ZHOU Zhanqing,et al. Multi-motor speed synchronous control based on improved relative coupling structure[J]. Transactions of China Electrotechnical Society,2019,34(3):474-482. [18] 毛诗柱,梁志坤. 基于滑模控制的多电机速度同步偏差耦合控制[J]. 包装工程,2018,39(5):153-157.MAO Shizhu,LIANG Zhikun. Multi-motor speed synchronization relative coupling control based on sliding-mode control[J]. Packaging Engineering,2018,39(5):153-157. [19] 何晋,曹鲁成,李珂,等. 改进型偏差耦合结构的多电机同步控制系统[J]. 兵工自动化,2020,39(3):41-44,52.HE Jin,CAO Lucheng,LI Ke,et al. Multi-motor synchronization control system with improved deviation coupling structure[J]. Ordnance Industry Automation,2020,39(3):41-44,52. [20] 胡先锋,李雅梅. 基于并行双模态模糊-PI补偿的多电机SMC控制[J]. 测控技术,2020,39(2):86-90,120.HU Xianfeng,LI Yamei. Multi-motor synchronous control based on parallel dual-mode fuzzy-PI compensation[J]. Measurement & Control Technology,2020,39(2):86-90,120. [21] 吉洪智,赵朝会,胡怡婷,等. 永磁同步电动机超螺旋非奇异快速终端滑模转速控制[J]. 上海电机学院学报,2019,22(5):290-294.JI Hongzhi,ZHAO Chaohui,HU Yiting,et al. Speed control of permanent magnet synchronous motor based on super-twisting non-singular fast terminal sliding mode[J]. Journal of Shanghai Dianji University,2019,22(5):290-294. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 792
- HTML全文浏览量: 131
- PDF下载量: 41
- 被引次数: 0
