0 引言
为了减少煤矿安全事故的发生,需要一种实时准确的煤矿井下人员定位保障系统。煤矿井下巷道空间狭小,作业噪声严重,普通的室内外定位方式无法满足要求。随着传感技术、计算机网络技术、无线通信技术的不断发展,WSN(Wireless Sensor Network,无线传感器网络)被应用到各个领域。WSN自组织性强、节点数量大、以数据为中心的特点符合煤矿应用需求。WSN节点定位技术是目标节点通过网络中位置已知的信标节点,在有限的通信范围内实现对自身位置的估计。目前经典WSN节点定位算法分为基于测距的定位算法和基于非测距的定位算法。基于测距的定位算法[1]包括RSSI(Received Signal Strength Indicator,接收信号强度指示)算法、TOA (Time of Arrival,到达时间)算法、TDOA(Time Difference of Arrival,到达时间差)算法等。非测距的定位算法包括APIT(Approximation Point-In-Triangulation Test,近似三角形内点测试)定位算法[2]、DV-Hop算法[3]、质心定位算法[4-5]等。随着研究的深入,新的定位算法不断被提出:文献[6]提出了基于BP (Back Propagation)神经网络[7]的Amorphous定位算法,通过BP神经网络优化预先设置的目标节点与信标节点间的接收信号强度阈值,修正最小跳数,减小了定位误差。但该算法忽略了对平均每跳距离的修正,影响定位精度。文献[8]提出了一种估算RSSI测距模型中环境因子Xσ的方法,以减少测距误差,并使用加权三角形质心定位算法提高定位精度。但该方法忽略了RSSI测距模型中路径衰减指数η的影响,而η是RSSI测距模型中产生测距误差的主要因素,决定测距的实时性及准确性。文献[9]提出了基于信道衰减模型的煤矿井下加权质心定位算法,通过动态获取η解决了巷道不同区域因衰减因子各异产生测距误差的问题。但是,煤矿井下噪声干扰严重,低成本的WSN设备匹配恰当的传播损耗模型几乎不可能,必然会带来测距误差。文献[10]提出了基于BP神经网络和泰勒级数的室内定位算法,使用BP神经网络优化传统RSSI测距模型中的Xσ和η,利用泰勒级数展开式提高定位精度。但该方法采用的传统RSSI测距模型需要较为复杂的运算,运算的复杂度增加了能量消耗,不利于节点持久性工作,同时没有考虑BP神经网络收敛速度慢、易陷入局部极小值的问题。
针对上述问题,本文提出了基于PSO(Particle Swarm Optimization,粒子群优化)[11-13]-BP神经网络的煤矿井下自适应定位算法。针对传统RSSI测距模型计算复杂、易受干扰的缺点,选用指纹匹配非测距模型。针对煤矿井下环境时变性引起定位精度差的问题,将井下布置完成的信标节点升级为参考点的校准节点,根据井下环境变化引起的校准节点间RSSI的变化量来动态补偿目标节点与各信标节点的指纹,减少了重新量测参考点RSSI、更新静态数据库的工作量,以较低的算法复杂度实现定位自适应性。最后,针对BP神经网络学习时间长、易陷入局部极小的问题,采用PSO算法进行优化处理,以提高学习效率和定位精度。
1 煤矿井下自适应模型
1.1 基于RSSI的指纹匹配算法
指纹匹配算法[14]通过构建一个信号强度-位置的指纹数据库定位目标节点。算法主要分为2个阶段。第1阶段为离线建库阶段:首先在定位需求区域布置适量的信标节点,并在该区域内分配多个参考点位置,信标节点分别接收在各个测量位置的参考点发射的信号强度值,所有参考点的信号强度-位置指纹存入数据库。第2阶段为在线匹配阶段:根据信标节点接收到的目标节点的RSSI值构建信号强度指纹信息,并与已构建完成的指纹信息数据库进行匹配,用指纹匹配算法定位目标节点。目前常用的匹配算法有最近邻法(Nearest Neighbor,NN)、K-加权最近邻法(K-Weight Nearest Neighbor,KWNN)、神经网络等。
在煤矿井下复杂环境中,指纹匹配算法直接建立RSSI与位置的映射关系,避免了传统测距模型因井下阴影效应、多径问题造成的测距误差,因此,更加适用于井下环境。但是,由于煤矿井下工作人员密度的改变、井下温度变化、湿度变化等时变因素,增大了实时采集的指纹信息与离线阶段建立的静态指纹数据库信息的匹配误差,针对这一问题,提出动态补偿法进行自适应匹配,减小匹配误差。
1.2 目标节点指纹动态补偿法
目标节点指纹动态补偿法主要思想:通过离线阶段与在线阶段校准节点间的RSSI变化量实时补偿目标节点指纹,修正后再与离线数据库进行匹配。根据参考点的位置分布部署信标节点,信标节点与参考点通信的同时,也作为校准节点进行通信。校准节点间的RSSI可反映巷道空间环境的时变特性,因此可用于依次实时修正目标节点与各个信标节点的指纹数据。动态补偿法公式为
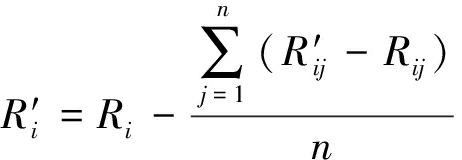
(1)
式中:![]() 为动态补偿后目标节点接收到的信标节点i的RSSI指纹数据,i=1,2,…,n;Ri为目标节点接收到的信标节点i的RSSI值;
为动态补偿后目标节点接收到的信标节点i的RSSI指纹数据,i=1,2,…,n;Ri为目标节点接收到的信标节点i的RSSI值;![]() 为在线测量阶段校准节点j接收到的校准节点i的RSSI均值;Rij为离线阶段校准节点j接收到的校准节点i的RSSI均值;n为校准节点的个数。
为在线测量阶段校准节点j接收到的校准节点i的RSSI均值;Rij为离线阶段校准节点j接收到的校准节点i的RSSI均值;n为校准节点的个数。
2 基于PSO-BP神经网络的定位算法
高精度的定位算法是指纹匹配等非测距模型解决煤矿井下巷道阴影效应、非视距传输、多径效应问题的关键。本文利用BP神经网络强大的非线性学习和自组织能力,对离线数据库进行学习和训练。BP神经网络存在以下问题:① 寻优权值过多,收敛速度慢。② 寻优过程存在多极值点,易陷入局部极小。针对上述问题,采用PSO优化BP神经网络权值,加速BP神经网络收敛,提高学习速度。
2.1 PSO算法
PSO-BP神经网络以BP神经网络各神经元之间的连接权值作为PSO算法的粒子个体。利用PSO算法较强的局部及全局搜索能力,以BP神经网络输入与输出的均方差作为适应度函数,PSO算法迭代过程即是BP神经网络权值寻优过程。PSO算法步骤如下。
(1) 初始化每个权值的位置及速度向量:
Xi=(xi1,xi2,…,xiD)
(2)
Vi=(vi1,vi2,…,viD)
(3)
式中:Xi,Vi分别为第i个粒子的空间位置向量和飞行速度向量,i=1,2,…,N,N为权值个数;D为搜索空间维数。
(2) 计算各权值的适应度值,适应度值最小的权值位置为每个权值的历史最优位置。适应度值最小的权值位置为全局最优位置。
(3) 更新权值速度和位移:
xid(k+1)=xid(k)+vid(k+1)
(4)
(5)
式中:xid,vid分别为第i个权值在第d维的位置及速度(0<d<D);c1,c2为学习因子;r1,r2为[0,1]的均匀随机数;pid为第i个权值的历史最佳位置;pgd为全部权值的历史最佳位置;ω为动态惯性权重:k为当前迭代次数。
(4) 用线性递减权重法更新权重公式:
ω=ωmax-k(ωmax-ωmin)/kmax
(6)
式中:ωmax,ωmin分别为惯性权重最大值及最小值;kmax为最大迭代次数。
(5) 计算当代权值的最好位置与其适应度值。
(6) 循环步骤(2)—(5),直至满足BP神经网络输入与输出误差最小的条件。
本文选取最大迭代次数为100次,粒子数为45个,最优适应度值为0.013 9。适应度曲线如图1所示。
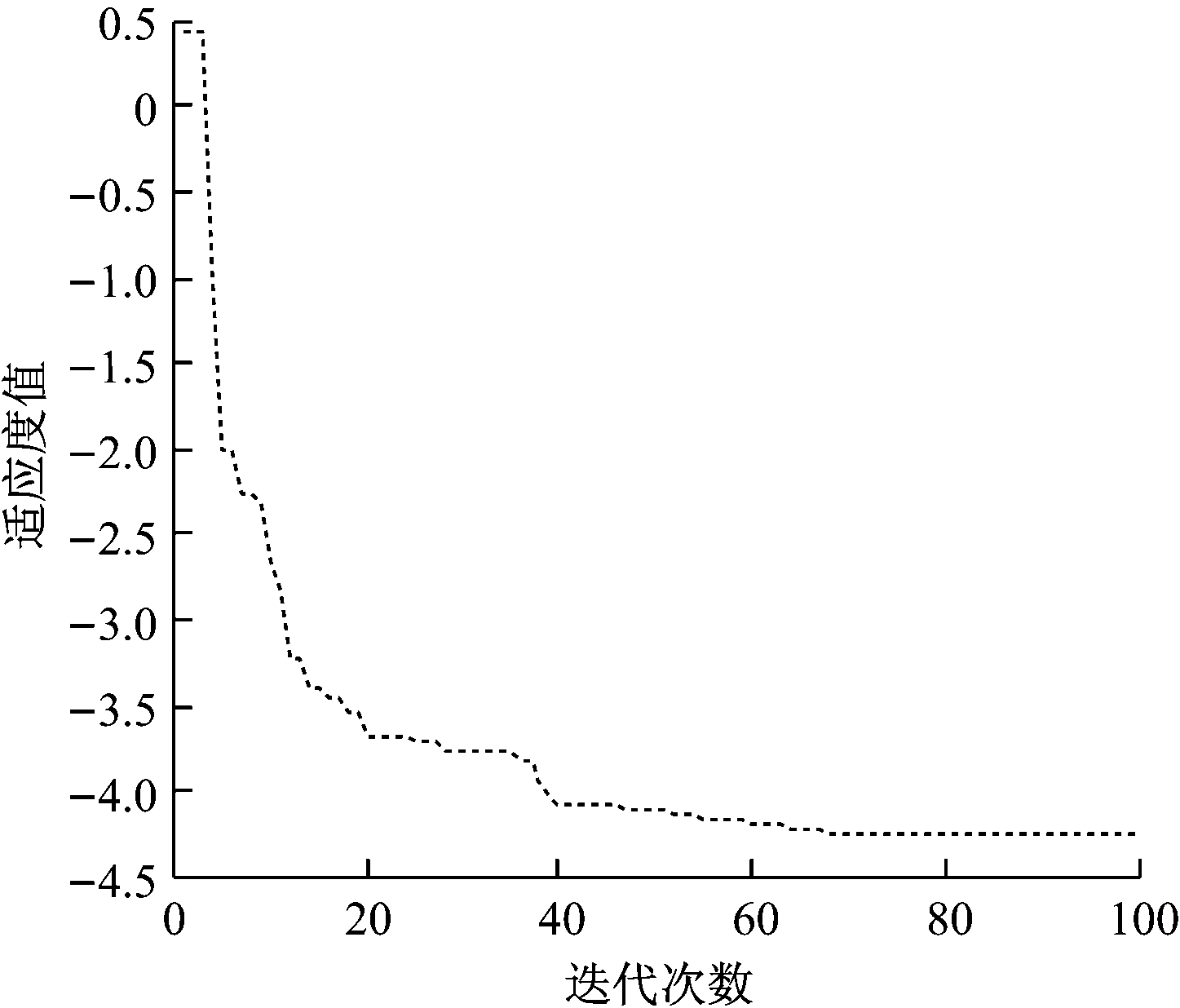
图1 适应度曲线
Fig.1 Fitness curve
2.2 BP神经网络
BP神经网络是一种误差反向传播的多层前馈网络,根据最速下降法的学习规则学习输入输出之间的映射关系,并通过逆向传播误差来修正和调整网络的权值和阈值,直到网络误差平方和最小。
隐含层和输出层的输出公式分别为
(7)
(8)
式中:Oi,Yk分别为隐含层及输出层的输出;f为隐含层和输出层的传输函数;ωij为输入层到隐含层的权值;xi为神经网络的输入;ωjk为隐含层到输出层的权值;Qij,Qjk为偏置。
隐含层和输出层的反向误差修正公式分别为
δk=(dk-Yk)Yk(1-Yk)
(9)
(10)
式中:δk,δj分别为输出层和隐含层的误差;dk为实际输出。
各层连接权值的误差修正公式为
ωjk=ωjk+αδkOi
(11)
ωij=ωij+αδjxi
(12)
式中:xi为输入;Yk为输出;ωij为输入层到隐含层的权值;ωjk为隐含层到输出层的权值。
本文选用3层BP神经网络,输入层有4个神经元,分别是4个信标节点的RSSI;隐含层有7个神经元,首先根据经验公式![]() 分别为隐含层、输入层、输出层神经元个数,a为[0,10]的随机数),初步确定隐含层的神经元个数范围,然后根据数据库数据进一步调整,确定神经元个数为7;输出层有2个神经元,输出(X,Y)坐标。隐含层、输出层传输函数为f(x)=(1-exp(-x))/(1+exp(-x))。BP神经网络结构如图2所示。
分别为隐含层、输入层、输出层神经元个数,a为[0,10]的随机数),初步确定隐含层的神经元个数范围,然后根据数据库数据进一步调整,确定神经元个数为7;输出层有2个神经元,输出(X,Y)坐标。隐含层、输出层传输函数为f(x)=(1-exp(-x))/(1+exp(-x))。BP神经网络结构如图2所示。

图2 BP神经网络结构
Fig.2 Structure of BP neural network
2.3 PSO-BP神经网络算法性能
为更加直观体现基于PSO-BP神经网络的井下自适应定位算法的优势,将其与NN,KWNN,BP定位算法的结果进行对比分析。实验数据为同一环境下离线阶段建立的数据库及目标节点未经过线性补偿的测量数据。定位结果对比如图3所示。
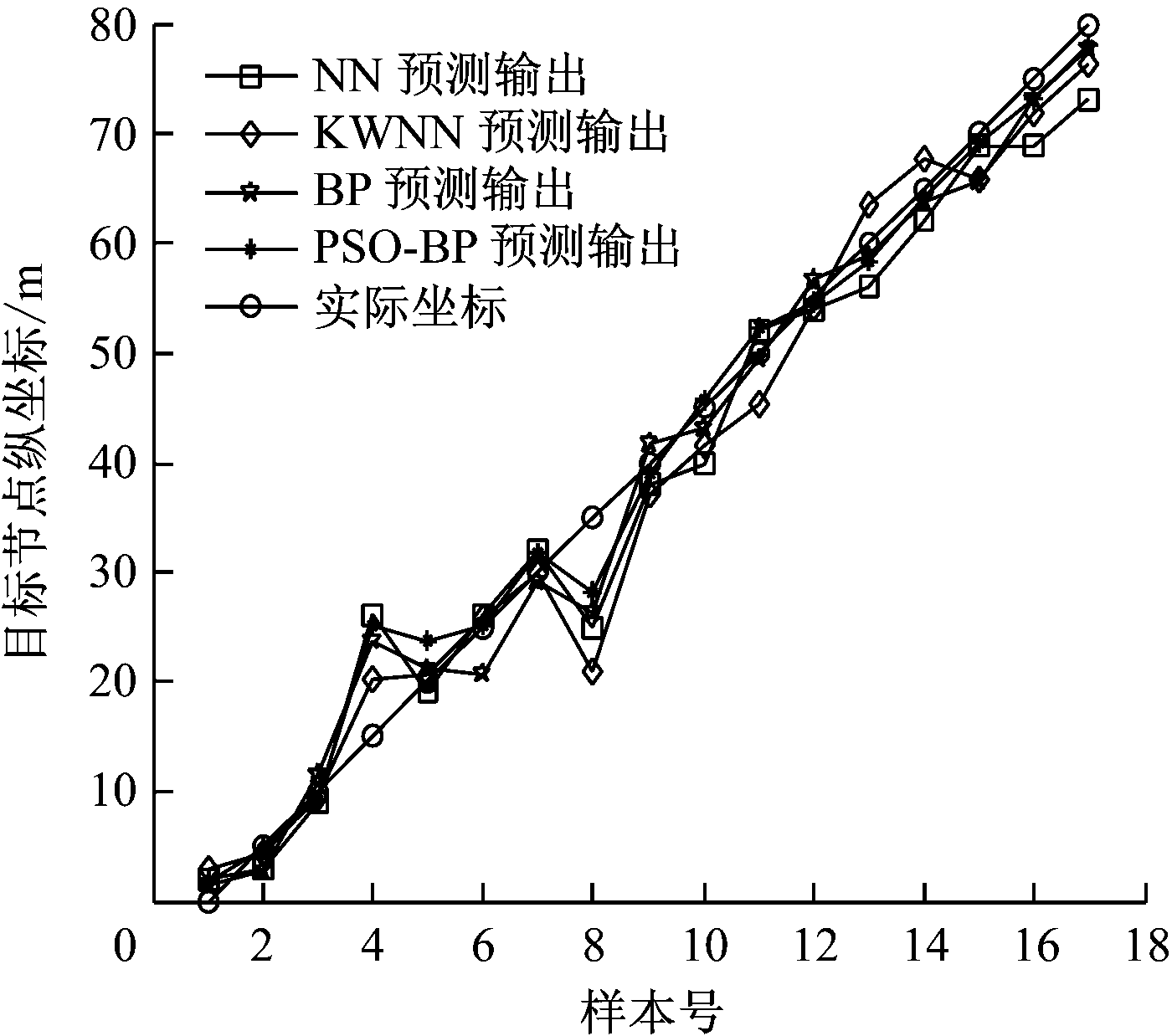
图3 定位结果对比
Fig.3 Comparison of positioning results
根据图3所示曲线计算出各定位算法均方误差(RMSE),见表1。根据图3和表1可知,相比于NN,KWNN,BP神经网络算法,基于PSO-BP神经网络的定位算法的RMSE更小,定位精度更高。程序运行阶段,PSO-BP神经网络与BP神经网络相比,相同的精度下PSO-BP算法收敛速度更快,训练次数较少,且在相同的训练次数下,有着更高的定位精度,满足煤矿井下定位需求。
表1 各定位算法的RMSE
Table 1 RMSE of the positioning algorithm

3 自适应定位算法实现及实验分析
3.1 自适应定位算法流程
自适应定位算法流程如图4所示。
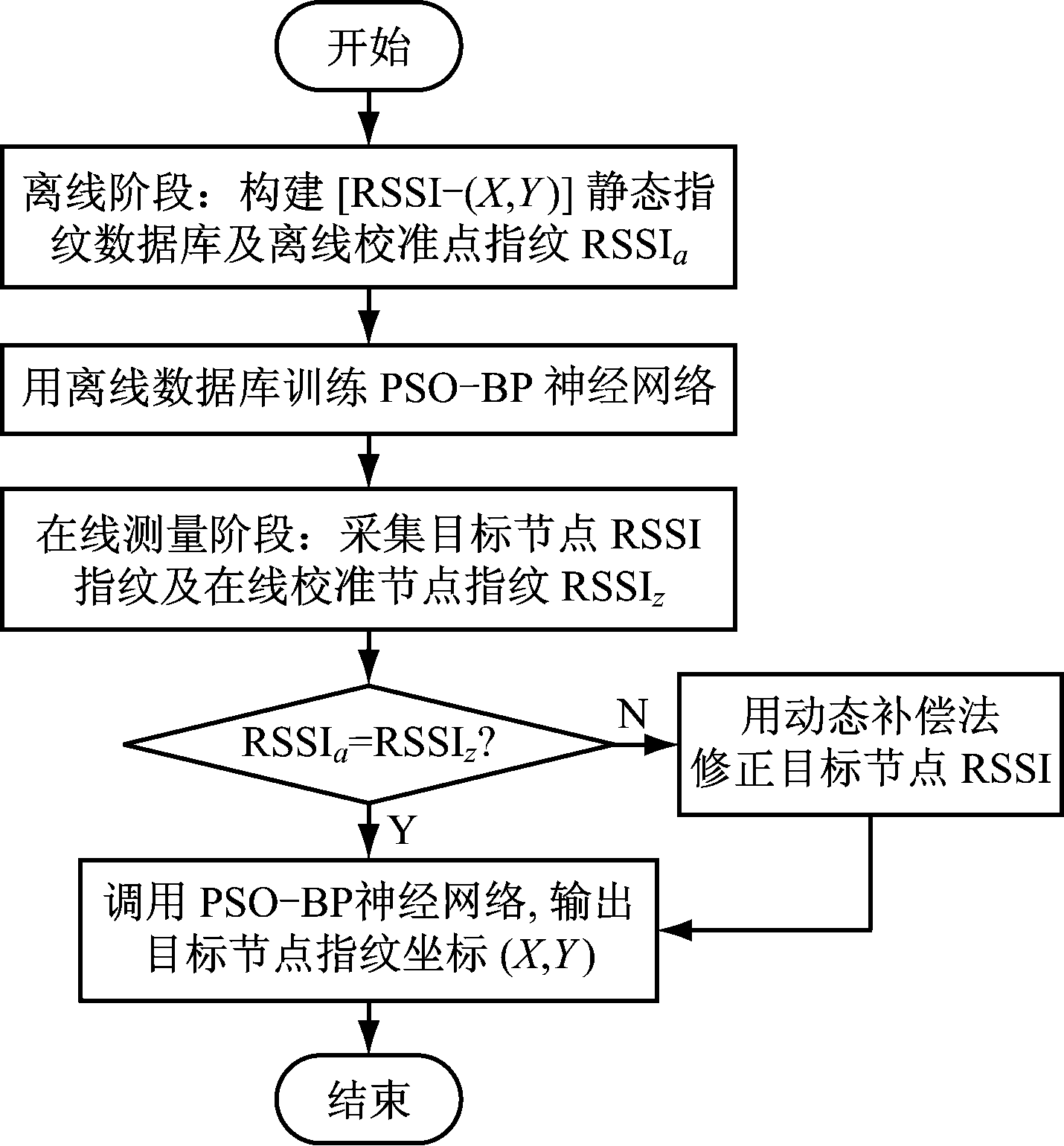
图4 自适应定位算法流程
Fig.4 Flow of adaptive positioning algorithm
3.2 实验方案
在待测区域为80 m×4 m的狭长地下通道验证算法在井下环境的自适应定位效果。节点布置选择线性布置方案,在80 m的通道内,每隔1 m设置1个数据采样点,作为参考点,实验共设置81个参考点。通道壁每隔20 m部署1个CC2530节点,共4个节点,作为信标节点(AP)及实验校准节点,位置分布同为线性布置,以反映参考点分布情况,观测离线阶段与在线阶段RSSI的变化。在离线建库阶段,测试人员将数据采集节点佩戴在腰间,每个参考点处发射50个数据包,AP接收RSSI,将RSSI汇聚至网关;网关节点将RSSI值传至终端,形成如[RSSI1,RSSI2,RSSI3,RSSI4,(X,Y)]的多元组的数据库。测量离线阶段每个校准节点与剩余校准节点RSSI,录入数据库,如AP1的RSSI为[RSSI12,RSSI13,RSSI14]。
在在线采集阶段,测试人员在起始位置(0,0)佩戴一个CC2530节点作为目标节点,以Vx=2.5 m/s,Vy=0 m/s的速度做直线运动,终点位置为(0,80 m)。每隔5 m向4个AP节点发送50个数据包,AP节点接收到目标节点的RSSI。同时,与离线阶段相同,在线阶段测量校准节点间的RSSI,如AP1的RSSI为[RSS![]() ,RSS
,RSS![]() ,RSS
,RSS![]() ]。分析2个阶段的校准节点数据,动态补偿目标节点与各AP间的RSSI,减少环境改变对定位的影响。
]。分析2个阶段的校准节点数据,动态补偿目标节点与各AP间的RSSI,减少环境改变对定位的影响。
3.3 实验结果
针对煤矿井下强时变特性引起定位精度差的问题,通过分析校准节点的RSSI在离线和在线2个阶段的变化,利用动态补偿法实时修正目标节点在线测量数据,提高定位精度,自适应定位结果如图5所示。
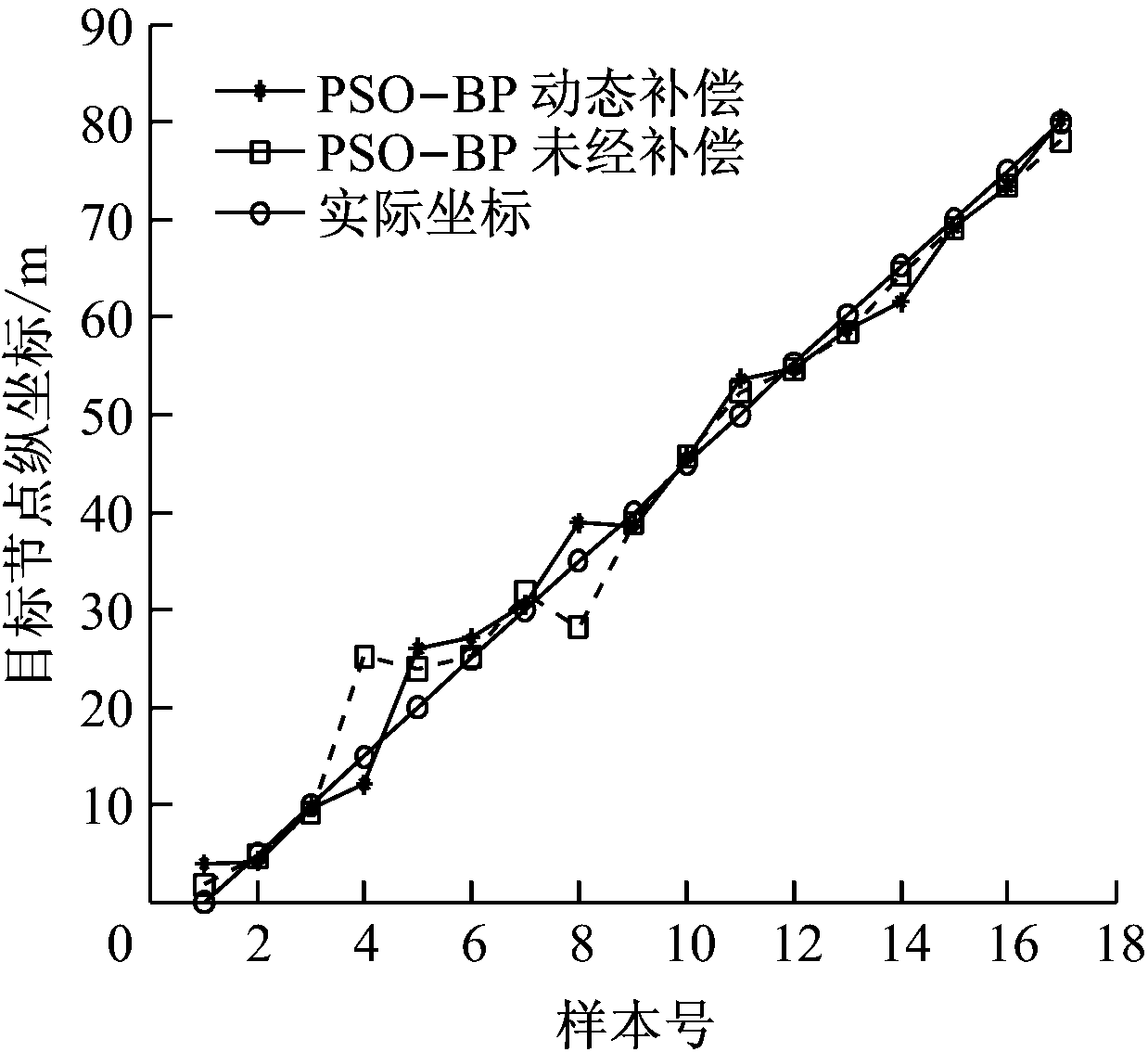
图5 自适应定位结果
Fig.5 Adaptive positioning results
由图5可知,目标节点RSSI指纹经动态补偿后,定位坐标更加接近于实际坐标,定位精度得以提高。计算2条曲线的RMSE可得,未经动态补偿的PSO-BP算法定位结果的RMSE为3.330 5,经过动态补偿后的PSO-BP算法定位结果的RMSE为2.868 6,定位精度提高了13.87%,验证了动态补偿法更加适应随时间变化的煤矿井下环境,能够满足井下自适应定位要求。
4 结语
提出了基于PSO-BP神经网络的井下自适应定位算法。因煤矿井下特殊的地理及通信环境,传统的基于测距模型的定位算法易受环境干扰,导致测距误差,影响定位精度,不适于井下复杂环境。因此,选择指纹匹配定位模型,更有效地避免了测距带来的误差。针对井下环境强时变性,将信标节点作为参考点的校准节点,以更好地反映参考点随环境变化的情况,避免增加额外的校准节点;在不增加硬件成本的同时,通过动态补偿法实时修正目标节点指纹数据,解决了指纹匹配算法自适应性差的问题。匹配定位阶段使用了PSO-BP神经网络定位算法,PSO优化算法缩短了BP神经网络的学习时间和训练次数,避免了神经网络陷入局部最优,提高了定位精度。
参考文献(References):
[1] 钱志鸿,孙大洋,LEUNG Victor.无线网络定位综述[J].计算机学报,2016,39(6):1237-1256.
QIAN Zhihong,SUN Dayang,LEUNG Victor.A survey on localization model in wireless networks[J]. Chinese Journal of Computers,2016,39(6):1237-1256.
[2] 吴栋,纪志成,张彪.基于无线传感器网络的改进APIT定位算法[J].系统仿真学报,2015,27(12):2965-2972.
WU Dong,JI Zhicheng,ZHANG Biao.Improved APIT localization algorithm based on wireless sensor network[J].Journal of System Simulation,2015,27(12):2965-2972.
[3] XU Yang,LUO Xiong,WANG Weiping,et al.Efficient DV-HOP localization for wireless cyber-physical social sensing system: a correntropy-based neural network learning scheme[J].Sensors,2017,17(1):135.
[4] 蒋锐,杨震.基于质心迭代估计的无线传感器网络节点定位算法[J].物理学报,2016,65(3):9-17.
JIANG Rui,YANG Zhen.An improved centroid lo calization algorithm based on iterative computation for wireless sensor network[J]. Acta Physica Sinica,2016,65(3):9-17.
[5] XIANG Hua,ZHANG Jinjin,BIN Lei.A new three-dimension spatial location algorithm of wireless sensor network[J].International Journal on Smart Sensing & Intelligent Systems,2016,9(1):233-255.
[6] ZHAO Linzhe,WEN Xianbin,LI Dan.Amorphous localization algorithm based on BP artificial neural network[C]//International Conference on Software Intelligence Technologies and Applications & International Conference on Frontiers of Internet of Things,Hsinchu,2014.
[7] 夏林元,吴东金.多基站模式下的实时与自适应室内定位方法研究[J].测绘通报,2012(11):1-6.
XIA Linyuan,WU Dongjin.On realtime and adaptive indoor positioning method under multi-base-station mode[J].Bulletin of Surveying and Mapping,2012(11):1-6.
[8] 张伟,孙强.一种基于无线传感器网络的室内定位算法[J].计算机科学,2014,41(增刊2):232-234.
ZHANG Wei,SUN Qiang.One of indoor positioning algorithm based on wireless sensor network[J].Computer Science,2014,41(S2):232-234.
[9] 韩东升,杨维,刘洋,等.煤矿井下基于RSSI的加权质心定位算法[J].煤炭学报,2013,38(3):522-528.
HAN Dongsheng,YANG Wei,LIU Yang,et al.A weighted centroid localization algorithm based on received signal strength indicator for underground coal mine[J].Journal of China Coal Society,2013,38(3):522-528.
[10] 张会清,石晓伟,邓贵华,等.基于BP神经网络和泰勒级数的室内定位算法研究[J].电子学报,2012,40(9):1876-1879.
ZHANG Huiqing,SHI Xiaowei,DENG Guihua,et al.Research on indoor location technology based on back propagation neural network and taylor series[J].Acta Electronica Sinica,2012,40(9):1876-1879.
[11] 张亚明,史浩山,陈客松,等.一种改进的无线传感器网络优化定位算法[J].电子科技大学学报,2015,44(3):357-362.
ZHANG Yaming,SHI Haoshan,CHEN Kesong,et al.An improved optimization localization algorithm in WSNs[J].Journal of University of Electronic Science and Technology of China,2015,44(3):357-362.
[12] 姚金杰,韩焱.基于粒子群和牛顿迭代法的目标定位方法研究[J].计算机应用研究,2010,27(5):1700-1701.
YAO Jinjie,HAN Yan.Research on target localization based on particle swarm and newton iterated algorithm[J].Application Research of Computers,2010,27(5):1700-1701.
[13] CHEN P,MAO Y.Wireless sensor network node localization algorithm based on chicken swarm optimization and multi-power mobile anchor[C]//Proceedings of the 2016 3rd International Conference on Materials Engineering, Manufacturing Technology and Control,2016.
[14] 李论,丁恩杰,郝丽娜,等.一种改进的煤矿井下指纹定位匹配算法[J].传感技术学报,2014,27(3):388-393.
LI Lun,DING Enjie,HAO Lina,et al.An improved location fingerprint localization matching algorithm in coal mine[J].Chinese Journal of Sensors and Actuators,2014,27(3):388-393.