图1 采煤机捷联惯导系统坐标系
Fig.1 Coordinate system of shearer strapdown inertial navigation system
张庆1,2, 王学文1,2, 谢嘉成1,2, 庞新宇1,2, 杨兆建1,2
(1.太原理工大学 机械工程学院, 山西 太原 030024;2.煤矿综采装备山西省重点实验室, 山西 太原 030024)
摘要:针对现有采煤机定位与姿态调整方法准确性较差的问题,在地面有缓慢坡度变化的情况下,对基于捷联惯导系统的采煤机定位与姿态调整方法进行了研究。首先介绍了采煤机定位技术,即由捷联惯导系统获取采煤机运动参数信息,采用欧拉角法对数据进行处理,进而完成采煤机位姿解算及实时定位;然后以采煤机截割高度调整为例,介绍了基于捷联惯导系统的采煤机姿态调整方法,重点推导了采煤机在不同截割工况下,采煤机截割高度与机身倾角之间的关系式;最后采用采煤机模型进行采煤机定位与截割高度调整实验,结果表明基于捷联惯导系统的采煤机定位与姿态调整方法可有效提高采煤机的定位与姿态调整精度。
关键词:煤炭开采; 采煤机定位; 采煤机姿态调整; 截割高度调整; 捷联惯导系统
Abstract:For problems of inaccurate shearer position and attitude adjustment, a shearer position and attitude adjustment method based on strapdown inertial navigation system was researched on the ground with slowly varied angle. Firstly, shearer position technology was introduced, namely strapdown inertial navigation system obtained motion parameters of shearer for further processing by Euler angle method, so as to complete attitude solution and real-time position of shearer. Then, an attitude adjustment method based on strapdown inertial navigation system was introduced by taking cutting height adjustment of shearer as an example, and relation between cutting height and body dip angle of shearer was derived under different shearer cutting conditions. Finally, shearer position and cutting height adjustment experiments were carried out by use of a shearer model. The experimental results show that the shearer position and attitude adjustment method based on strapdown inertial navigation system can effectively improve position and attitude adjustment accuracy of shearer.
Keywords:coal mining; shearer position; shearer attitude adjustment; cutting height adjustment; strapdown inertial navigation system
煤矿井下工作风险性高,且随着煤层开采深度的不断增大,采煤难度与日俱增[1],井下人员的安全保障难度增加。为了保障矿井安全高效生产,提高煤矿产量,必须实现自动化采煤[2],为此煤炭工业以智能化、少人化、无人化[3]为发展目标。采煤机作为综采设备“三机”(采煤机、液压支架、刮板输送机)之一,其位姿信息决定了刮板输送机与液压支架的状态,因此监测与确定采煤机在综采工作面的运行位置与姿态,完成记忆截割,是实现综采“三机”自动化运行的重要基础。
常用的采煤机定位方法有齿轮计数法、红外对射法及超声波反射法,但这些方法存在累积误差、无法连续监测等缺点[4]。针对该问题,有学者提出利用多传感器组合定位方式消除误差[5-6],并开始使用捷联惯导系统。捷联惯导系统在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏,具有数据更新率高、数据全面、短时定位精度高等优点[7],已被很多学者用于井下人员定位[8]、采煤机定位研究中[9-13]。但现有研究通常是在平整面情况下进行定位实验,不符合采煤工作面地面不平的实际情况,定位准确性较差。本文在地面具有缓慢坡度变化的情况下,进行基于捷联惯导系统的采煤机定位实验。考虑到采煤机行程较短,实验中忽略地球引力的影响。
采煤机姿态通常由机身、摇臂的姿态组成,采煤机摇臂的角度决定了滚筒高度,也影响着滚筒在截割过程中与煤壁的接触是否合适,因此,根据地面变化调整摇臂角度十分关键。目前对于采煤机运行过程中姿态实时调整的研究主要集中在采煤机摇臂与采煤机机身倾角的关系上[14-15],并没有考虑滚筒宽度等细微因素对计算精确度的影响,也没有考虑多种地形同时存在时二者的关系。本文针对不同的地形条件,提出一种采煤机姿态调整方法,以采煤机截割高度调整为例,介绍了该方法的实现原理。
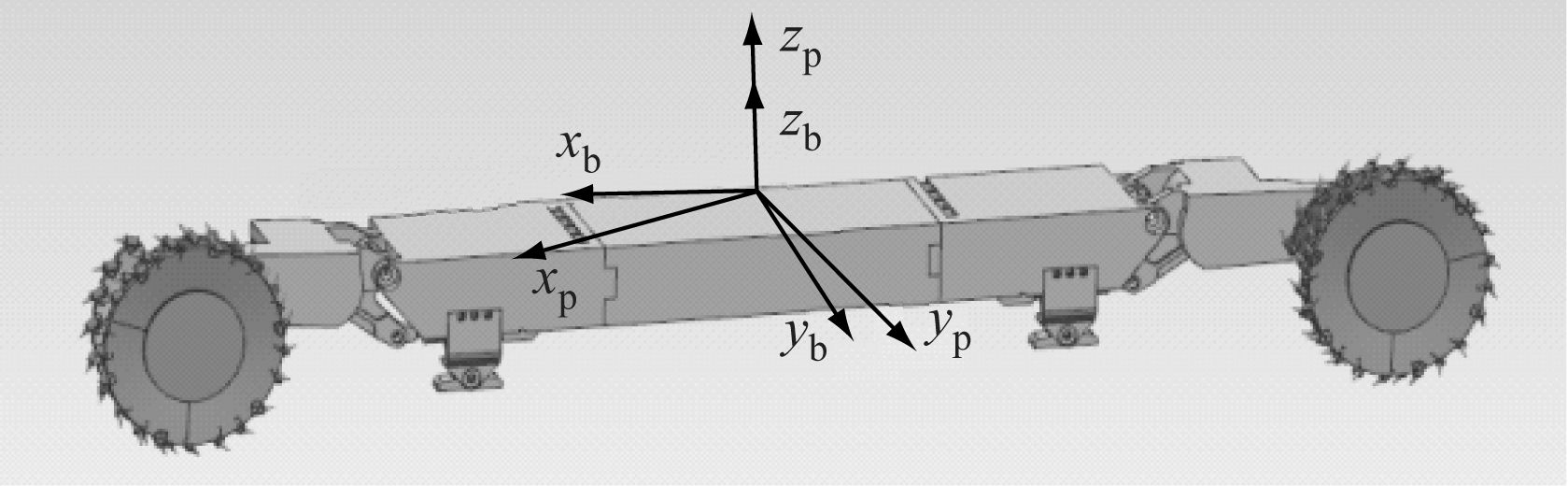
由于捷联惯导系统需要借助数学方法计算位姿信息,所以需要建立合适的坐标系并进行转换。以采煤机重心为中心,东、北、天分别为xp、yp、zp方向建立导航坐标系;以采煤机质心为中心,采煤机前进方向为xb轴,机身平面(俯视)上与xb轴垂直的方向为yb轴,与机身平面垂直的方向为zb轴,建立机身坐标系。采煤机捷联惯导系统坐标系如图1所示。
图1 采煤机捷联惯导系统坐标系
Fig.1 Coordinate system of shearer strapdown inertial navigation system
利用姿态矩阵可令位姿数据在导航坐标系和机身坐标系中转换,将测量值转换为实际值。因此,姿态矩阵的获得是捷联惯导系统位姿解算的关键。
姿态矩阵一般采用欧拉角法与四元数法求解。与四元数法相比,欧拉角法所需算式较少,且可以直接求得横滚角、俯仰角和航向角。因此,本文选用欧拉角法进行姿态矩阵的实时求解。
设采煤机的航向角为ψ,横滚角为θ,俯仰角为γ,则由欧拉角法求解姿态矩阵的微分方程为
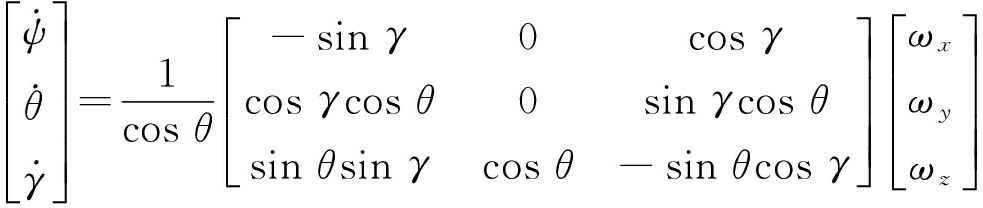
(1)
式中ωx,ωy,ωz分别为采煤机机身坐标系中xb,yb,zb轴角速度。
求解式(1)即可得到采煤机的3个姿态角ψ,θ,γ。将3个姿态角代入式(2)即可得到实时姿态矩阵T。

(2)
之后利用姿态矩阵T将测得的三轴加速度![]() 转换为采煤机的比力加速度:
转换为采煤机的比力加速度:
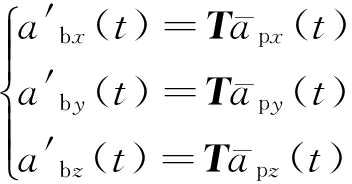
(3)
采煤机的实际加速度为
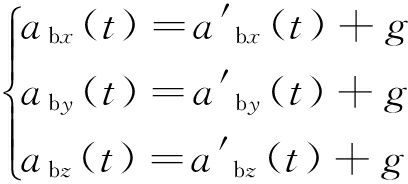
(4)
式中g为重力加速度。
最后对不同方向的实际加速度进行2次积分便可求得一定时间内采煤机在该方向的行驶距离。利用计算得到的距离和3个姿态角,便可描绘出采煤机的运行轨迹,从而实现定位。
采煤机姿态由机身倾角、摇臂抬起或下降的角度及滚筒高度组成。布置在机身上的捷联惯导系统在对采煤机进行定位的同时,也可获得采煤机机身倾角信息。采煤机摇臂角度可通过安装在摇臂上的倾角传感器获取。滚筒高度的良好控制是采煤机截割的重要环节,是指在底板处于不同角度时,滚筒能调整至合适高度,以保证采煤机正常的截割工作。本文以采煤机滚筒最高点高度即截割高度调整为例,说明基于捷联惯导系统的采煤机姿态调整方法。
采煤机割煤时每刀地形均会出现细微变化,采煤机需要实时获取自身横向倾角和纵向倾角,然后对采煤机截割高度进行实时调整。通过传感器测得采煤机俯仰角或横滚角后,根据采煤机摇臂与机身角度等参数的几何关系,计算出采煤机机身处于不同倾角时倾角与截割高度的关系,进而对采煤机截割高度进行实时调整。
采煤机截割高度与机身倾角的几何关系如图2所示。
图2(a)、图2(b)为采煤机上下坡行进的情况。由于实际工作面坡度变化缓慢,所以位于采煤机机身平面中心点的传感器测得的倾角可作为整个采煤机机身倾角。H为摇臂与机身铰接处与地面的距离;L为摇臂长度;l为机身长度;R为滚筒半径;α为摇臂与机身平面的夹角;β为机身倾角。
上坡、下坡情况下采煤机截割高度分别为
图2(c)、图2(d)分别为采煤机处于仰采与俯采的情况。k为滚筒宽度;b为采煤机宽度;ρ为机身侧向倾角。
仰采、俯采情况下采煤机截割高度分别为
(a) 采煤机上坡
(b) 采煤机下坡
(c) 采煤机仰采
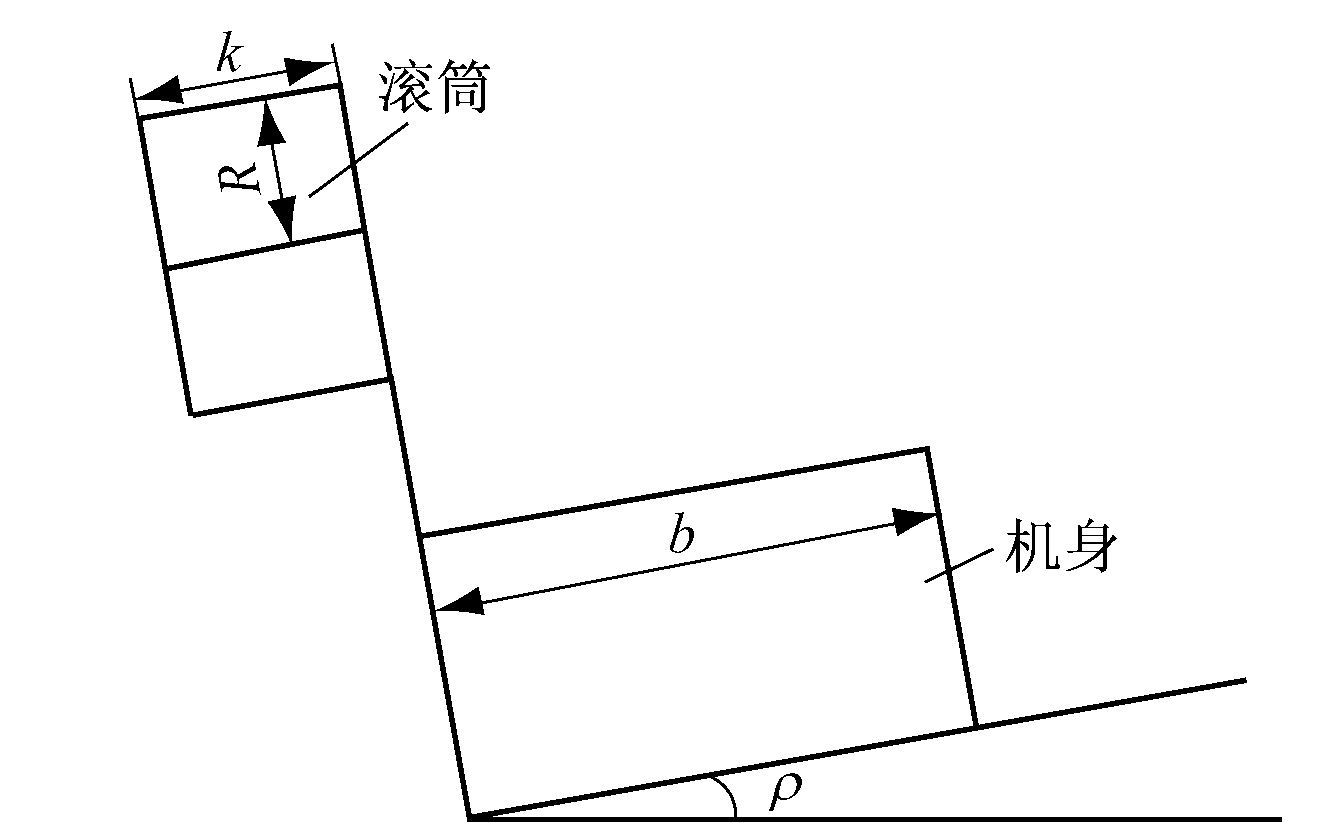
(d) 采煤机俯采
图2 采煤机截割高度与机身倾角的几何关系
Fig.2 Geometrical relationship between shearer cutting height and tilting angles of shearer body
H2=![]() +(b+k)sinρ- (H+Lsinα)tanρsinρ+Rcosρ
+(b+k)sinρ- (H+Lsinα)tanρsinρ+Rcosρ
(7)
H3=(H+Lsinα-ktanρ)cosρ+![]() +(k-Rtanρ)sinρ
+(k-Rtanρ)sinρ
(8)
在实际情况中,机身可能同时处于上下坡与俯仰采的工作状态,如上坡且仰采情况下采煤机截割高度为
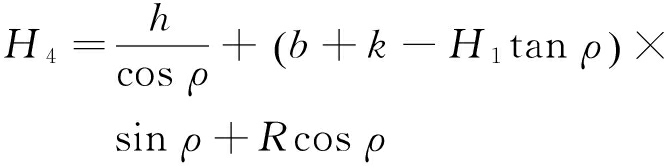
(9)
式中h=![]() +(Lcosα+l)sinβ-(H+Lsinα)tanβsinβ。
+(Lcosα+l)sinβ-(H+Lsinα)tanβsinβ。
下坡且仰采情况下采煤机截割高度为
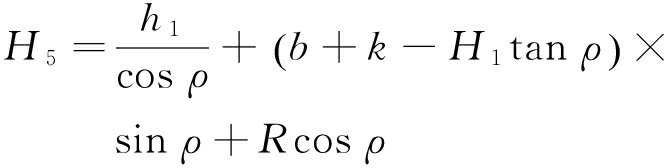
(10)
式中h1=![]() -Lcosαsinβ+(H+Lsinα)tanβsinβ。
-Lcosαsinβ+(H+Lsinα)tanβsinβ。
通过式(9)、式(10)可看出,同时存在2种情况时,可利用单独情况下的关系式进行组合,得出采煤机截割高度公式。
通过式(5)—式(10)获得的不同情况下采煤机截割高度与采煤机处于平面且摇臂与机身角度(即α)不变时的截割高度之差,即为采煤机滚筒需要调整的高度。通过计算也可求出摇臂需要调整的角度。
通过2组实验分别验证基于捷联惯导系统的采煤机定位与截割高度调整方法。利用搭载了捷联惯导系统的遥控小车进行采煤机定位实验。利用3D打印机制作简易的采煤机模型,将该模型与小车连接后进行采煤机截割高度调整实验。
实验选用MTi-300捷联惯导系统,其基本参数:俯仰角与横滚角的精度为0.2°,航向角精度为1.0°,陀螺仪和加速计的零偏稳定性分别为10°/h,0.04 mg,基本满足实验需求。在PC端利用配套软件MT Manager获取数据。
实验所用的小车尺寸为180 mm×100 mm×88.5 mm(长×宽×高)。在小车上搭载采煤机模型,摇臂旋转半径为60 mm,摇臂上滚筒宽度为19 mm。摇臂可以旋转至0~90°之间的任意角度,以满足实验需要。
利用一些模块在斜面上构建一条轨道,如图3所示。令小车沿轨道行驶,通过捷联惯导系统采集三轴线加速度和三轴角速度并传输至计算机。选取12个关键节点A—L(12个轨道模块的中点),各关键节点的实际姿态和位置数据见表1。
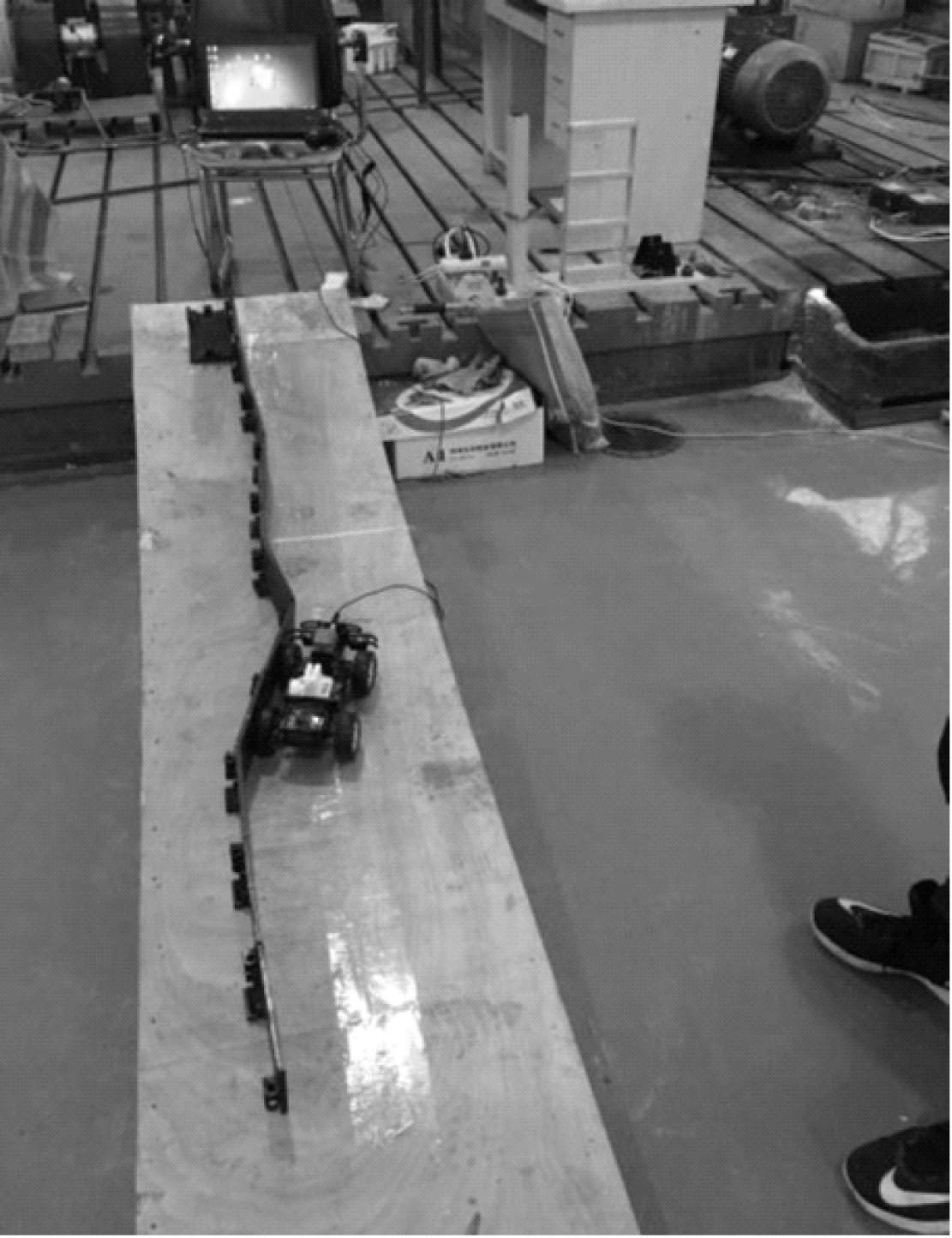
图3 实验装置
Fig.3 Experiment equipment
表1 关键节点实际姿态与位置数据
Table 1 Date of actual attitude and location of key points

利用捷联惯导系统的位姿解算模块计算小车行驶至关键节点时的位置信息,并根据计算结果及表1绘制小车运动轨迹,如图4所示。可见计算轨迹与实际轨迹基本重合,I点的高度误差最大,经计算可知角度误差达1.9°。考虑到在实验过程中,斜面变形与小车自身减震器的影响会导致误差,且12个关键节点中只有1个节点的误差超过了1.5°,可认为计算轨迹与实际轨迹趋势基本一致。因此,捷联惯导系统可用于采煤机定位。
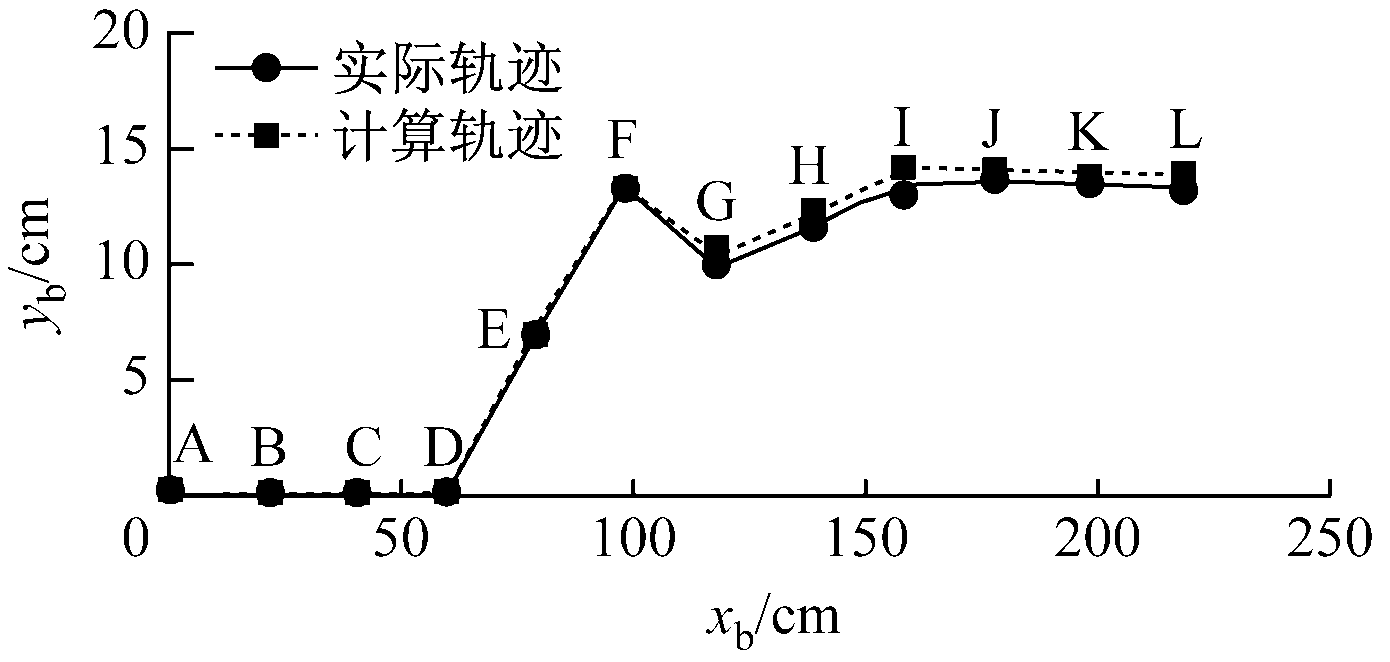
(a) 小车行驶轨迹

(b) 坡度变化轨迹
图4 小车实际轨迹与计算轨迹
Fig.4 Actual track and calculated track of equipment
采用简易采煤机模型对截割高度与机身倾角的几何关系式进行验证,如图5所示。首先将摇臂与机身平面的夹角α设置为30°,之后将小车与摇臂模型放置在水平地面上,测量滚筒至地面高度。在NX8.0中建立与实物相同的模型来辅助测量。然后将小车分别放置在与水平地面呈10,14,18°(β=10,14,18°)的平面上,分成上下坡2种情况进行多次测量并取平均值,结果见表2。

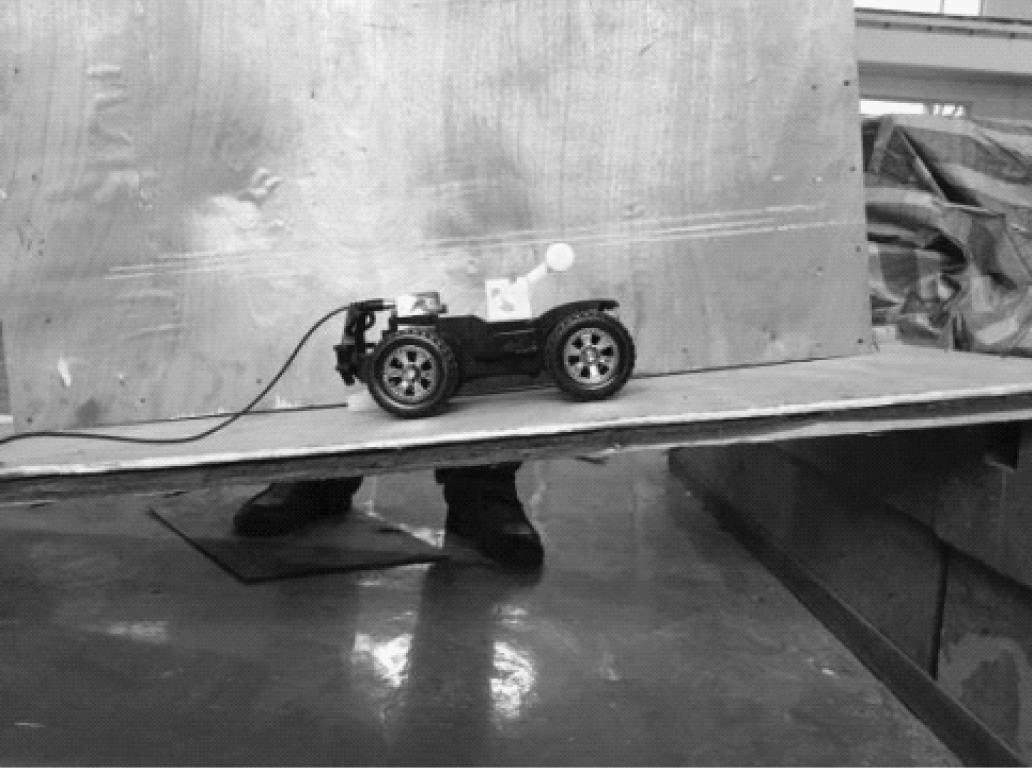
图5 简易采煤机模型
Fig.5 Simplified shear model
采用同样的方法测量小车在ρ=5,9°仰采情况下与ρ=4,9°俯采情况下的截割高度,结果见表3。
最后测量小车在上下坡俯仰采(α=30°)时的截割高度,结果见表4、表5。
从表2—表5可看出,利用本文提出的采煤机截割高度调整方法得到的数值与测量值偏差很小,最大误差为0.8%,摇臂的最大偏差角度仅为1.55°。因此,该方法可为采煤机截割高度调整提供位置信息。另外,机身倾角可由捷联惯导系统测得,为采煤机截割高度调整提供数据支持。
表2 上下坡时采煤机截割高度测量值和计算值
Table 2 Measurement date and calculation data of shearer cutting height under up-hill or down-hill condition
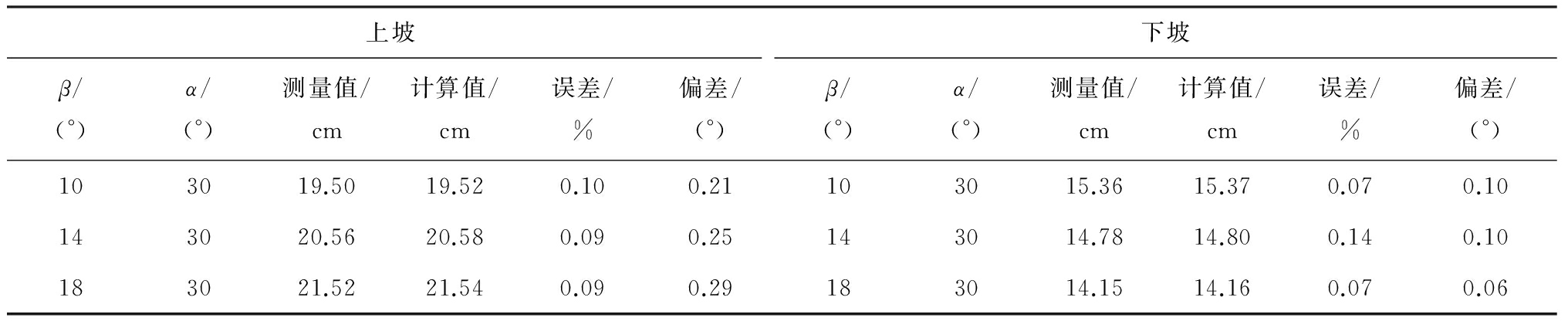
表3 俯仰采情况下采煤机截割高度测量值与计算值
Table 3 Measurement date and calculation date of shearer cutting height under up-dip or down-dip mining condition

表4 上坡俯仰采情况下采煤机截割高度测量值与计算值
Table 4 Measurement date and calculation date of shearer cutting height under up-dip or down-dip mining condition on up-hill

表5 下坡俯仰采情况下采煤机截割高度测量值与计算值
Table 5 Measurement date and calculation date of shearer cutting height under up-dip or down-dip mining condition on down-hill

(1) 基于捷联惯导系统获取与处理井下采煤机位姿数据,可获得采煤机位置信息。通过建立不同工况下采煤机截割高度与机身倾角的关系式,得到实际工况下采煤机截割高度调整方法。
(2) 通过实验验证了基于捷联惯导系统的采煤机定位与截割高度调整方法能够实现较为精确的采煤机定位,并完全表达采煤机在实际工况下的摇臂姿态,对采煤机截割高度调整计算起到了辅助作用。
(3) 下一步将在井下采煤机上应用并验证本文方法,以实现采煤机记忆截割与实时监测。
参考文献(References):
[1] 董涛.我国薄煤层采煤工艺现状及发展趋势[J].煤矿安全,2012,43(5):147-149.
DONG Tao.The present situation and development trend of thin coal seam mining technology in China[J].Safety in Coal Mines,2012,43(5):147-149.
[2] WANG Guimei,JIAO Shanlin,CHENG Guangxing.Fully mechanized coal mining technology for thin coal seam under complicated geological conditions[J].Energy Exploration and Exploitation,2011,29(2):169-177.
[3] 王金华,黄乐亭,李首滨,等.综采工作面智能化技术与装备的发展[J].煤炭学报,2014,39(8):1418-1423.
WANG Jinhua,HUANG Leting,LI Shoubin,et al.Development of intelligent technology and equipment in fully-mechanized coal mining face[J].Journal of China Coal Society,2014,39(8):1418-1423.
[4] 张露.基于捷联惯导的采煤机位姿解算算法研究[D].西安:西安科技大学,2014.
[5] 应葆华,李威,罗成名,等.一种采煤机组合定位系统及实验研究[J].传感技术学报,2015,28(2):260-264.
YING Baohua,LI Wei,LUO Chengming,et al.Experimental study on combinative positioning system for shearer[J].Chinese Journal of Sensors and Actuators,2015,28(2):260-264.
[6] 安美珍.采煤机运行姿态及位置检测的研究[D].北京:煤炭科学研究总院,2009.
[7] 田成金.薄煤层自动化工作面关键技术现状与展望[J].煤炭科学技术,2011,39(8):83-86.
TIAN Chengjin.Status and outlook of key technology for automation coal mining face in thin seam[J].Coal Science and Technology,2011,39(8):83-86.
[8] 吕振,刘丹,李春光.基于捷联惯性导航的井下人员精确定位系统[J].煤炭学报,2009,34(8):1149-1152.
LYU Zhen,LIU Dan,LI Chunguang.The precise positioning system of the mine personnel in coal pit based on strapdown inertial navigation[J].Journal of China Coal Society,2009,34(8):1149-1152.
[9] 张金尧,李威,杨海,等.采煤机捷联惯导定位方法研究[J].工矿自动化,2016,42(3):52-55.
ZHANG Jinyao,LI Wei,YANG Hai,et al.Study of shearer positioning method using strapdown inertial navigation system[J].Industry and Mine Automation,2016,42(3):52-55.
[10] 李秀凤,吴静然,刘晓文.基于捷联惯导的采煤机定位系统研究[J].工矿自动化,2013,39(11):53-56.
LI Xiufeng,WU Jingran,LIU Xiaowen.Research of shearer positioning system based on strapdown inertial navigation system[J].Industry and Mine Automation,2013,39(11):53-56.
[11] 杨海,李威,罗成名,等.基于捷联惯导的采煤机定位定姿技术实验研究[J].煤炭学报,2014,39(12):2550-2556.
YANG Hai,LI Wei,LUO Chengming, et al.Experimental study on position and attitude technique for shearer using SINS measurement[J].Journal of China Coal Society,2014,39(12):2550-2556.
[12] 樊启高,李威,王禹桥,等.一种采用捷联惯导的采煤机动态定位方法[J].煤炭学报,2011,36(10):1758-1761.
FAN Qigao,LI Wei,WANG Yuqiao,et al.A shearer dynamic positioning method using strap down inertial navigation[J].Journal of China Coal Society,2011,36(10):1758-1761.
[13] 杨海.SINS/WSN组合定位下采煤机精确位姿感知理论及技术研究[D].徐州:中国矿业大学,2016.
[14] 徐志鹏,王忠宾,米金鹏.采煤机自适应记忆切割[J].重庆大学学报(自然科学版),2011,34(4):134-140.
XU Zhipeng,WANG Zhongbin,MI Jinpeng.Shearer self-adaptive memory cutting[J].Journal of Chongqing University(Natural Science Edition),2011,34(4):134-140.
[15] 刘春生.滚筒式采煤机记忆截割的数学原理[J].黑龙江科技学院学报,2010,20(2):85-90.
LIU Chunsheng.Mathematic principle for memory cutting on drum shearer[J].Journal of Heilongjiang Institute of Science and Technology,2010,20(2):85-90.
ZHANG Qing1,2, WANG Xuewen1,2, XIE Jiacheng1,2, PANG Xinyu1,2, YANG Zhaojian1,2
(1.College of Mechanical Engineering, Taiyuan University of Technology, Taiyuan 030024, China; 2.Shanxi Key Laboratory of Fully Mechanized Coal Mining Equipment, Taiyuan 030024, China)
中图分类号:TD679
文献标志码:A 网络出版时间:2017-09-27 15:02
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170927.1502.017.html
文章编号:1671-251X(2017)10-0083-07
DOI:10.13272/j.issn.1671-251x.2017.10.017
收稿日期:2017-03-30;
修回日期:2017-08-15;责任编辑李明。
基金项目:国家自然科学基金山西煤基低碳联合基金资助项目(U1510116);山西省回国留学人员科研资助项目(2016-043);山西省基础条件平台项目(2014091016);山西省高等学校创新人才支持计划资助项目(2014)。
作者简介:张庆(1990-),男,内蒙古呼和浩特人,硕士研究生,研究方向为机械设备工况监测,E-mail:454295681@qq.com。通信作者:王学文(1979-),男,山西长治人,教授,博士,研究方向为机械现代设计、固体力学和摩擦学等,E-mail:wxuew@163.com。
引用格式:张庆,王学文,谢嘉成,等.基于捷联惯导系统的采煤机定位与姿态调整[J].工矿自动化,2017,43(10):83-89. ZHANG Qing,WANG Xuewen,XIE Jiacheng,et al.Shearer position and attitude adjustment based on strapdown inertial navigation system[J].Industry and Mine Automation,2017,43(10):83-89.