(a) 开环控制
陈金国1, 刘春生2, 范剑红1, 张艳军2, 万丰2
(1.莆田学院 机电工程学院, 福建 莆田 351100;2.黑龙江科技大学 机械工程学院, 黑龙江 哈尔滨 150027)
摘要:为提高采煤机滚筒调高系统的动态特性及跟踪可靠性,通过分析滚筒调高系统工作原理及液压机构几何参数对应关系,建立了滚筒高度与液压缸行程数学模型;结合模糊自适应PID控制器,在Automation Studio软件环境下建立了电液比例换向阀控液压缸开环和闭环控制滚筒调高系统仿真模型,研究了空载和负载情况下系统的速度响应及位置跟踪特性,结果表明提出的滚筒调高系统响应速度快,对滚筒位置跟踪的吻合度较好,且闭环控制滚筒调高系统优于开环控制滚筒调高系统。
关键词:煤炭开采; 采煤机; 滚筒调高系统; 模糊自适应PID控制; 电液比例换向阀
Abstract:In order to improve dynamic performance and tracking reliability of drum height adjusting system of shearer, mathematical models of drum height and hydraulic cylinder displacement were established by analyzing work principle of the drum height adjusting system and relationship of geometric parameters of hydraulic mechanism. Combining fuzzy adaptive PID controller, simulation models of open loop controlled and closed loop controlled drum height adjusting systems based on electric-hydraulic proportional direction valve controlling hydraulic cylinder were established in Automation Studio software. Speed response and location tracking characteristics of the systems were studied under no-load and load conditions separately. The simulation results show that the systems have fast response speed and better goodness of fit of drum location tracking, and performance of the closed loop controlled drum height adjusting system is better than the open loop controlled one.
Keywords:coal mining; shearer; drum height adjusting system; fuzzy adaptive PID control; electric-hydraulic proportional direction valve
滚筒调高系统是采煤机的重要组成部分。因煤层地质条件复杂,井下作业工况恶劣,采煤机工作过程中滚筒调高系统易受到载荷冲击和煤、岩石、水污染,且液压传动部分的故障率较机械传动部分和电气控制部分高,严重影响采煤作业生产。因此,滚筒调高系统是采煤机设计的重点[1-3]。在滚筒调高系统仿真设计方面,现有研究主要针对系统动态特性和滚筒位置跟踪展开。曾庆良等[4]应用AMESim软件建立了滚筒调高系统的机液协调仿真模型,验证了电液换向阀控制方式能够实现采煤机滚筒位置控制;徐二宝等[5]采用AMESim软件建立了采煤机滚筒调高电液比例开环和闭环PID控制系统仿真模型,仿真结果证明闭环PID控制系统动态性能优于开环控制系统;赵丽娟等[6]应用ADAMS/Hydraulics插件建立了滚筒调高系统液压机构模型,并与机械机构模型进行耦合,实现了滚筒调高系统的机液联合仿真分析,结果表明滚筒调高系统具有一定的稳定性和可靠性;张春雨[7]采用Matlab软件对开关阀和电液比例换向阀滚筒调高系统进行仿真分析,结果表明电液比例换向阀替代开关阀可改善滚筒调高系统动态性能;彭天好等[8]采用AMESim与ADAMS的协调仿真接口,构建了电液比例调高系统机液耦合仿真模型,研究了滚筒调高系统动态特性;丁浩伦[9]应用AMESim软件建立了半实物滚筒调高系统仿真模型,结合Matlab软件制定了模糊控制规则和模糊PID控制模型,通过联合仿真验证了模糊PID控制系统可以消除采煤机自适应调高的轨迹跟踪误差。因井下煤层复杂,采煤机滚筒截割煤岩载荷具有不确定性,上述采用简单控制方式的采煤机滚筒调高系统难以满足现场需求。笔者在现有研究成果的基础上,提出了基于电液比例换向阀控液压缸开环、闭环模糊自适应PID控制的采煤机滚筒调高系统,并对该系统中的机械部分和液压部分建模,采用Automation Studio软件建立了接近实际工况的滚筒调高系统仿真模型,分析了系统工作特性,为进一步提高系统可靠性、降低故障率提供参考。
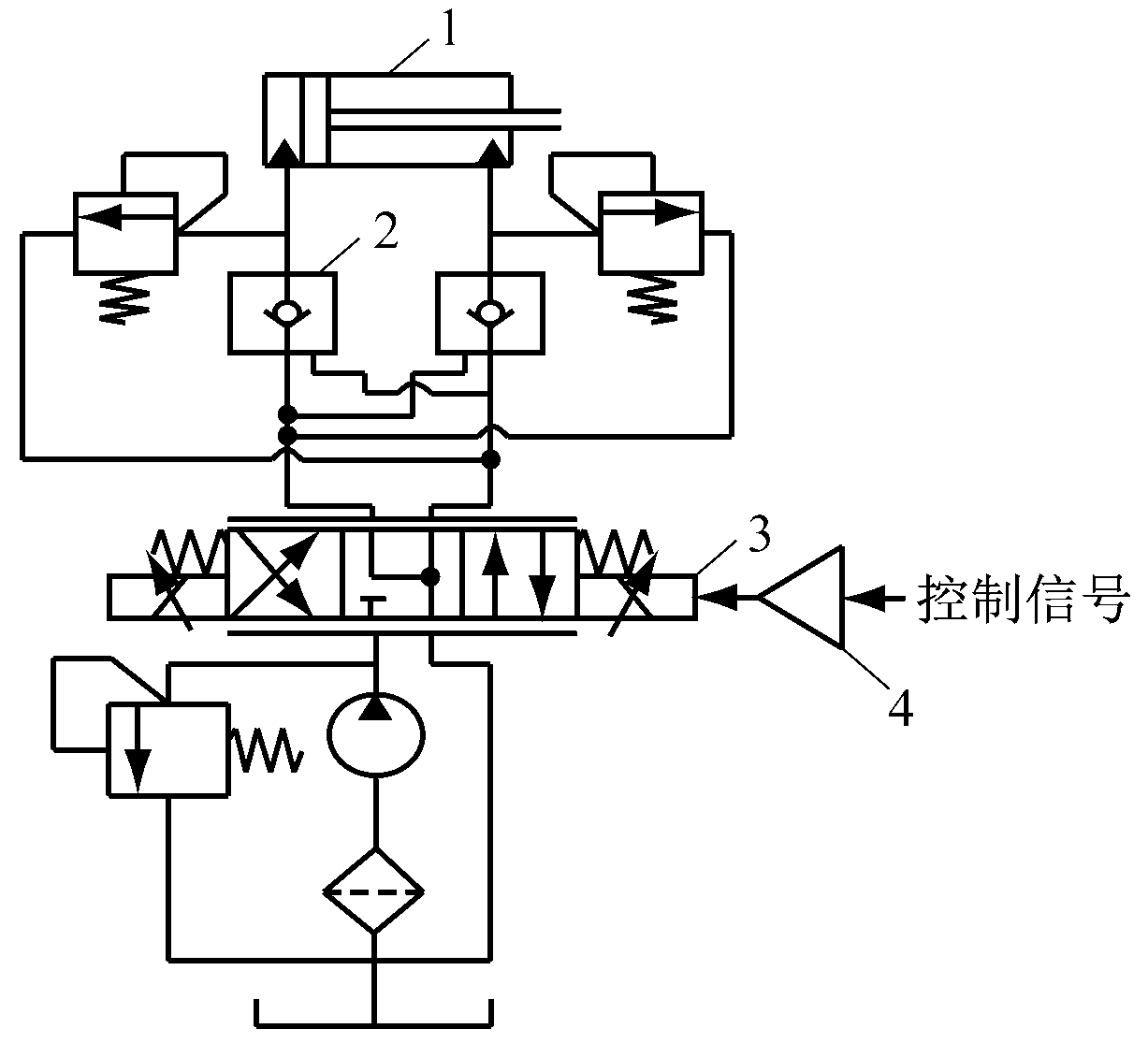
基于电液比例换向阀控液压缸开环模糊自适应PID控制的采煤机滚筒调高系统(简称开环控制滚筒调高系统)工作原理:井下操作工观察滚筒截割工况,通过调节电液比例换向阀的控制信号来控制电液比例换向阀的开口量,从而改变液压缸流量,最终实现滚筒高度调整,如图1(a)所示。基于电液比例换向阀控液压缸闭环模糊自适应PID控制的采煤机滚筒调高系统(简称闭环控制滚筒调高系统)工作原理:计算机通过分析液压缸内位移传感器采集的活塞杆移动位置,结合滚筒高度与液压缸行程数学模型,得到滚筒位置的电信号,并与给定的电信号进行比较,结合模糊PID控制器对偏差量进行处理,处理后的信号经比例放大器放大后,控制电液比例换向阀的输入电流,实现滚筒位置的精确调整[6-7],如图1(b)所示。
(a) 开环控制
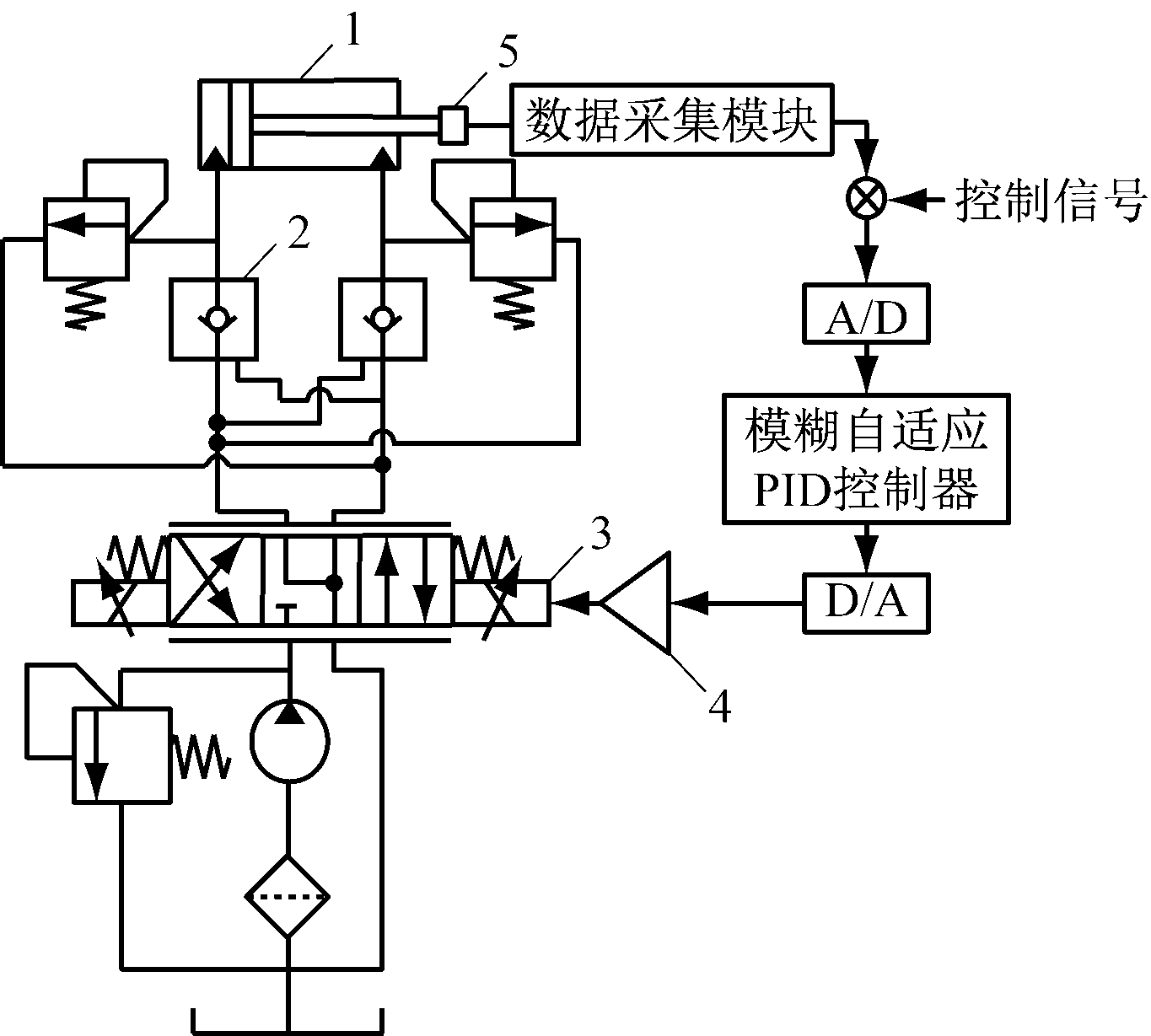
(b) 闭环控制
1—液压缸;2—液压锁;3—电液比例换向阀;4—比例放大器;5—位移传感器
图1 采煤机滚筒调高系统工作原理
Fig.1 Working principle of drum height adjusting system of shearer
采煤机滚筒调高系统液压机构几何示意如图2所示。液压机构通过控制液压缸中活塞来回伸缩实现滚筒上下摆动。O1为摇臂上下摆动的铰接点;O2为液压缸与机体的铰接点;P,P1,P2分别为滚筒圆心运动轨迹上任意一点、最低点、最高点;G,G1,G2分别为液压缸活塞杆伸出任意长度、最小长度、最大长度时活塞杆前端位置点;L,R分别为摇臂、摆臂长度;L0为O1,O2点间距;H为P点相对于地面的垂直高度(即滚筒高度);α为P,O1点连线与P1,O1点连线的夹角;H0为O1点与地面的垂直距离;α1为P1,O1点连线与过O1点水平线之间的夹角;S为液压缸活塞行程;φmin为O1,O2点连线与O1,G1点连线的夹角。
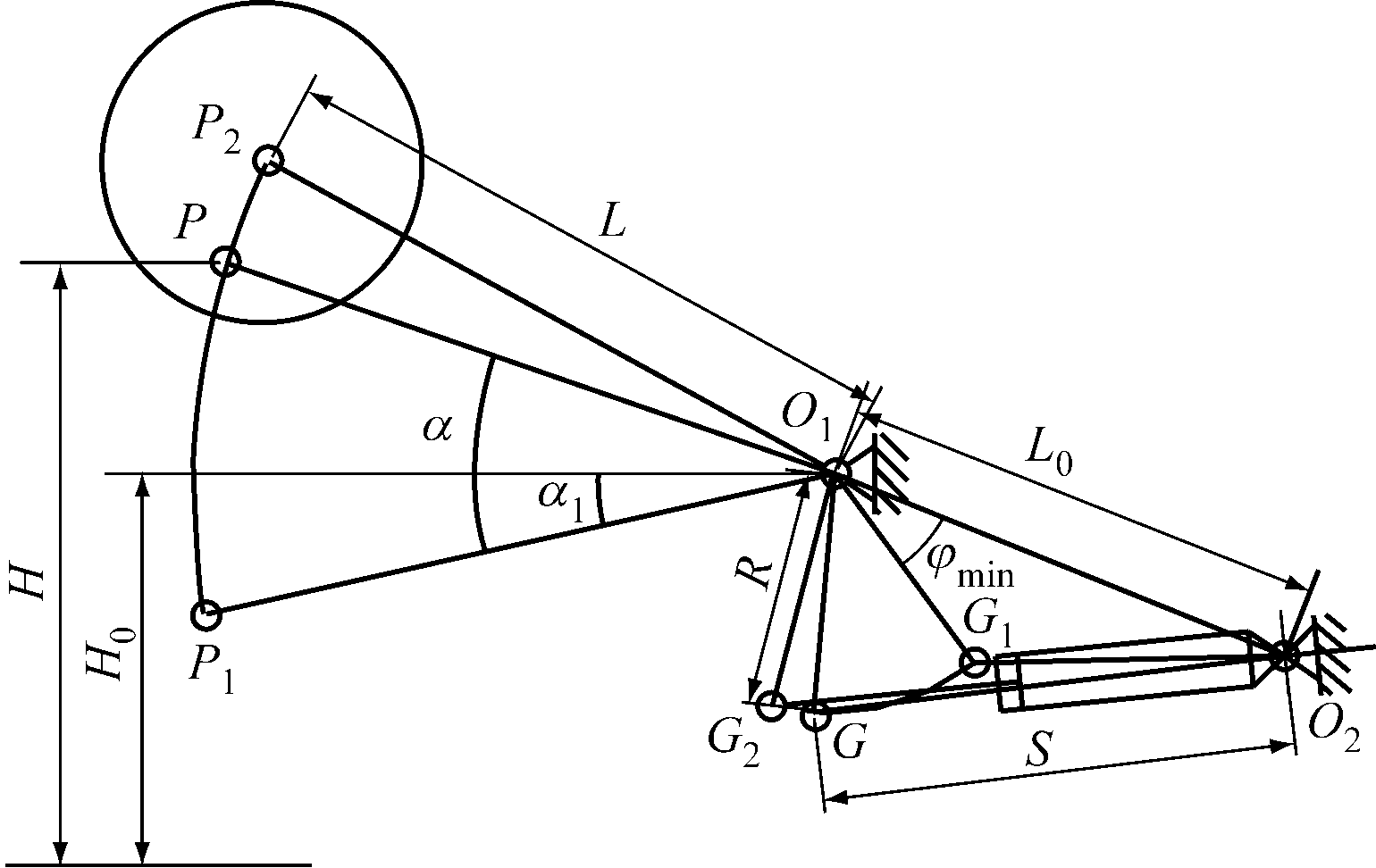
图2 采煤机滚筒调高系统液压机构几何示意
Fig.2 Geometrical diagrammatic sketch of hydraulic mechanism in drum height adjusting system of shearer
由图2中系统液压机构几何参数对应数学关系可知,滚筒高度为
H=H0+Lsin(α-α1)
(1)
对式(1)进行三角函数展开,并令φ=α+φmin,整理得
(2)
由余弦定理得
cosφ=![]()
(3)
sinφ=![]()
(4)
则有
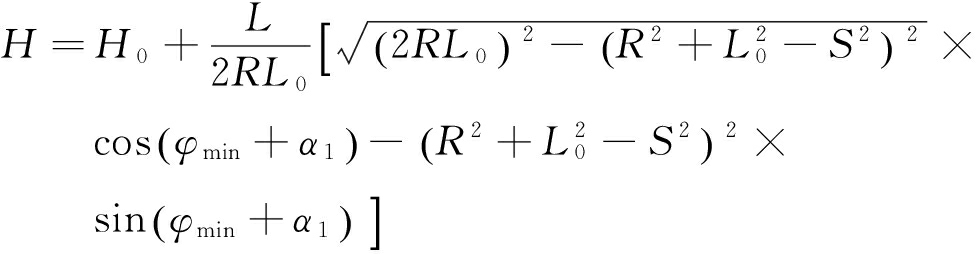
(5)
在采煤机滚筒调高系统中,电液比例换向阀控液压缸属于非对称液压缸组成的动力机构,具有质量、阻尼、弹性3种负载,如图3所示。
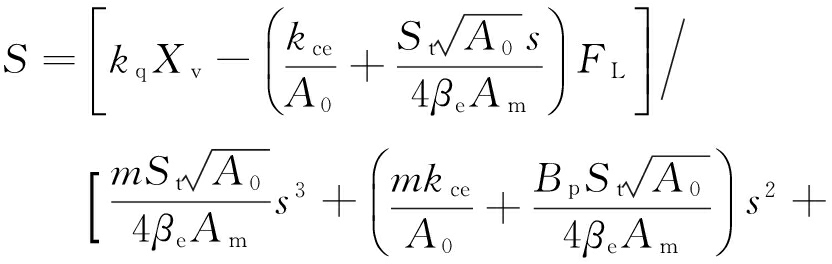
电液比例换向阀控液压缸传递函数[10]为
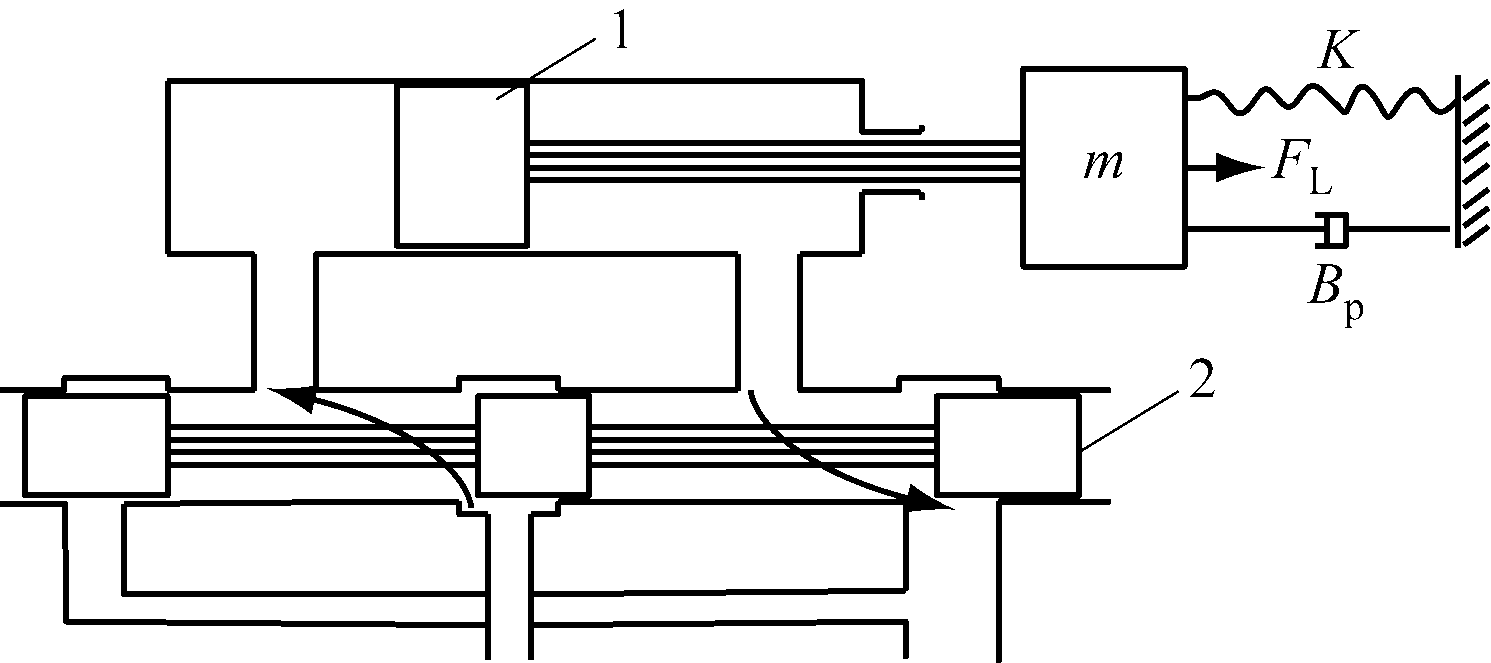
1—液压缸活塞杆;2—电液比例换向阀阀芯
图3 电液比例换向阀控液压缸模型
Fig.3 Model of hydraulic cylinder controlled by electric-hydraulic proportional direction valve
(6)
式中:kq为流量增益;Xv为电液比例换向阀阀芯位移;kce为总流量压力系数;A0为活塞的平均面积,A0=(A1+A2)/2,A1,A2分别为液压缸无杆腔、有杆腔的有效作用面积;St为液压缸活塞总行程;s为复变数;βe为有效体积弹性模量;Am=(![]() +
+![]() )/2;FL为作用于液压缸活塞上的外干扰力;m为折算到液压缸活塞上的总质量;Bp为液压缸活塞、负载等运动部件的黏性阻尼系数;K为负载弹簧刚度。
)/2;FL为作用于液压缸活塞上的外干扰力;m为折算到液压缸活塞上的总质量;Bp为液压缸活塞、负载等运动部件的黏性阻尼系数;K为负载弹簧刚度。
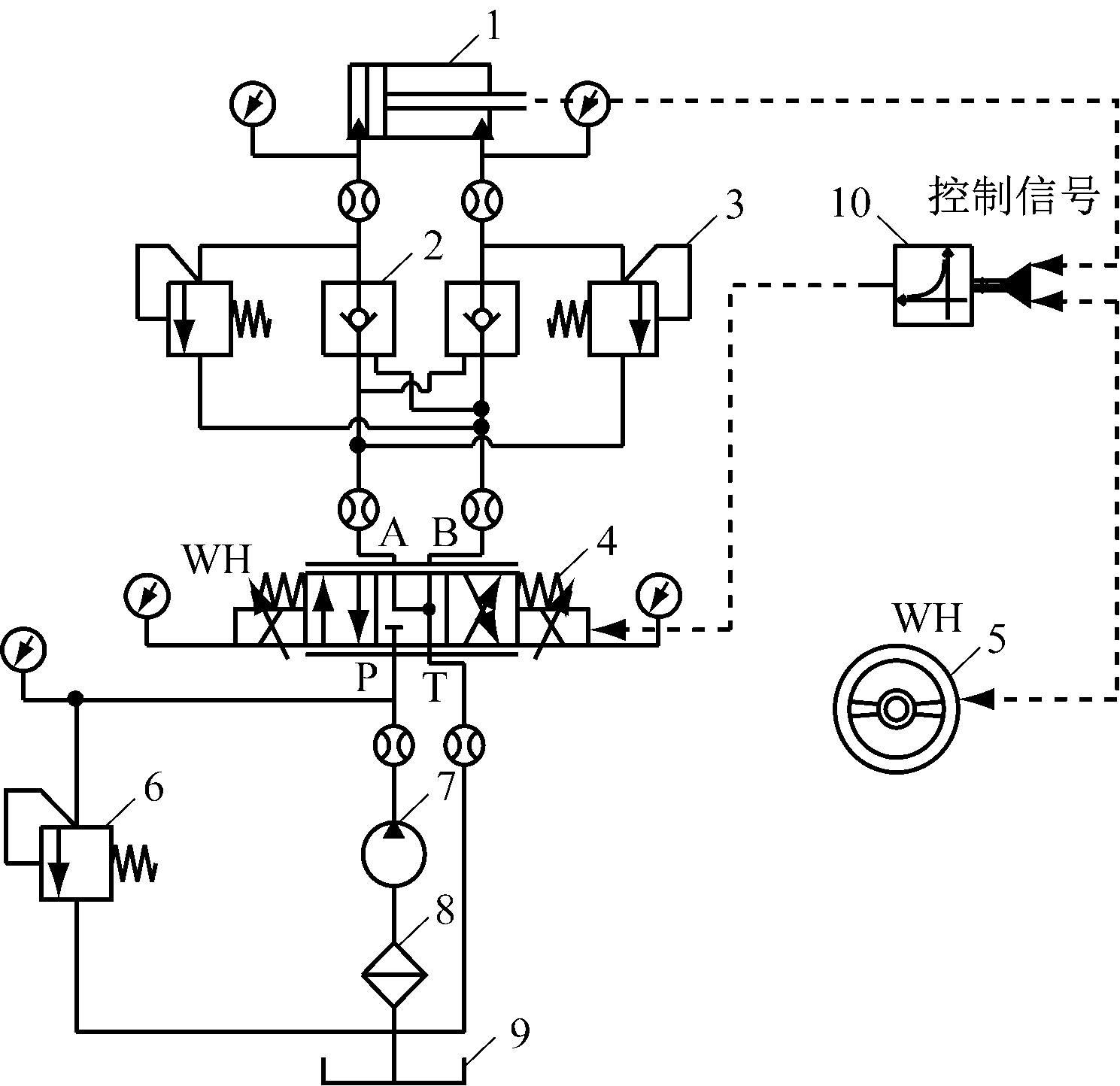
Automation Studio软件集成了电气控制、机械系统仿真、液压元件生产商的产品目录,为工程实际中液压控制系统提供了仿真环境和灵活的解决方案。根据采煤机滚筒调高系统结构及工作原理,分析系统各元件之间的关系,利用Automation Studio软件中的液压与比例液压设计库、电气控制库等的液压缸、泵、油箱、控制器等模块,搭建开环、闭环控制滚筒调高系统模型,并结合采煤机实际工作状况,对滚筒调高系统中的元件参数进行设置。
以某型号采煤机为研究对象,建立滚筒调高系统模型,如图4所示。参数设置:液压缸活塞直径为0.18 m,活塞杆直径为0.12 m,行程为0.46 m;负载力为10 kN;定量泵流量为1.087 5 m3/h;开环控制滚筒调高系统的控制信号比例放大系数为8,闭环控制滚筒调高系统的位移与电流转换系数为10[11]。
为了研究开环、闭环控制滚筒调高系统的响应特性,通过给电液比例换向阀施加10 mA阶跃控制电流信号(调高速度为0.03 m/s)来模拟采煤机实际工作状况。仿真时间为1 s,步长为0.02 s,模糊自适应PID控制器参数参照文献[12]设置。空载时仿真结果如图5(a)所示。可见闭环控制滚筒调高系统相对于开环控制滚筒调高系统,其响应速度快,超调量小,系统比较稳定。

(a) 开环控制
(b) 闭环控制
1—液压缸;2—液压锁;3—溢流阀;4—电液比例换向阀;5—输入信号;6—安全阀;7—油泵;8—过滤器;9—油缸;10—模糊自适应PID控制器
图4 Automation Studio环境下采煤机滚筒调高系统模型
Fig.4 Model of drum height adjusting system of shearer in Automation Studio
令t=2 s时载荷从0突变到10 kN,模拟采煤机有负载时工作状况。仿真结果如图5(b)所示。可看出采煤机截割煤岩过程中,开环和闭环控制滚筒调高系统的整体响应特性都很好,只是在载荷突变时有波动,虽然二者最终都趋于稳定,但是闭环控制滚筒调高系统相对于开环控制滚筒调高系统,在负载突变时速度波动幅度小,因此系统鲁棒性、抗干扰能力较强,对采煤机截割煤岩过程中负载非线性变化的适应性较好。
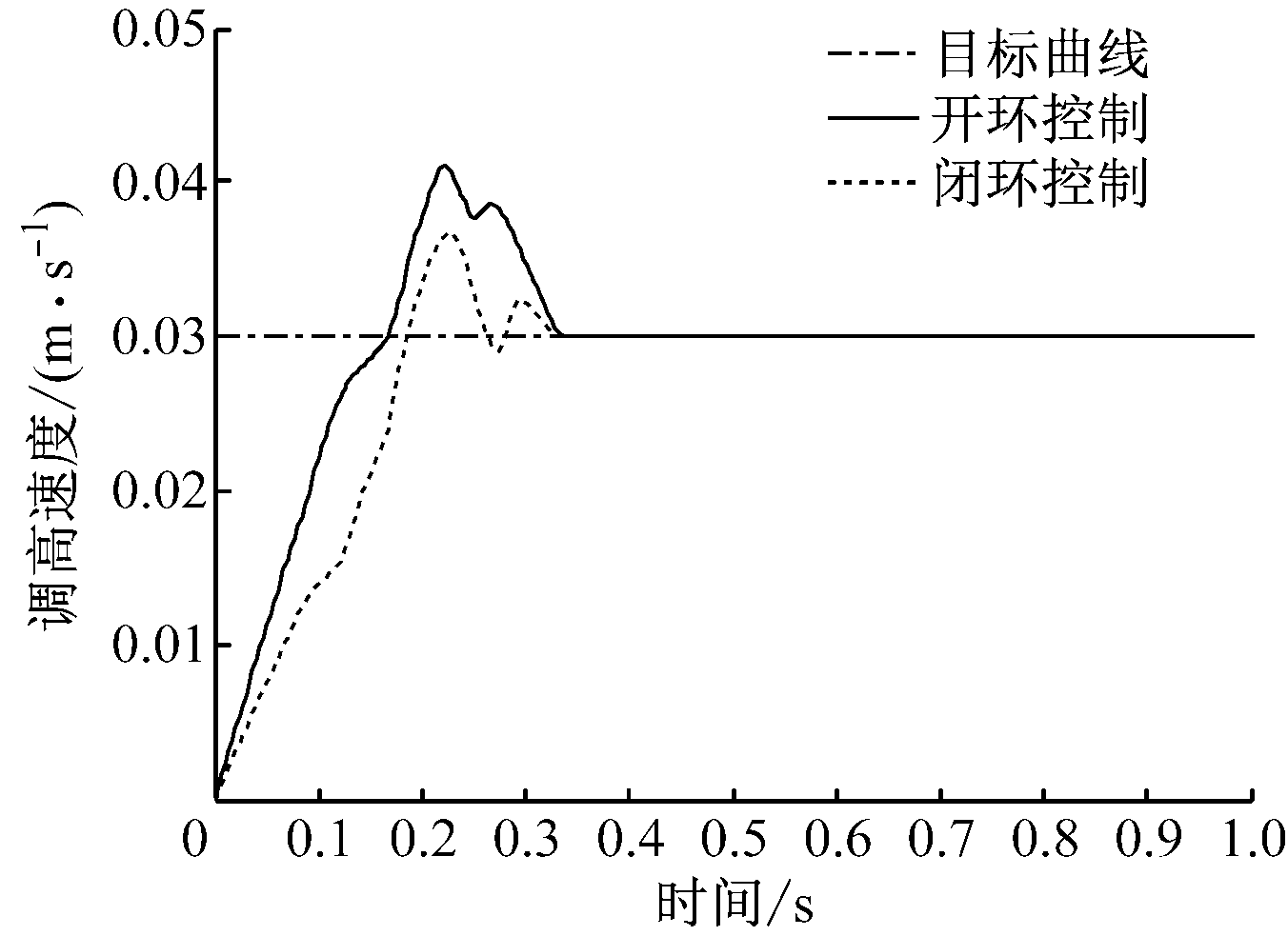
(a) 空载

(b) 负载
图5 采煤机滚筒调高系统速度阶跃响应曲线
Fig.5 Speed step response curve of drum height adjusting system of shearer
为了研究采煤机滚筒调高系统的跟踪精度,分别对开环、闭环控制滚筒调高系统进行位置跟踪仿真。仿真时间为40 s,步长为0.05 s,模糊自适应PID控制器参数参照文献[12]设置,仿真结果如图6所示。

(a) 跟踪曲线
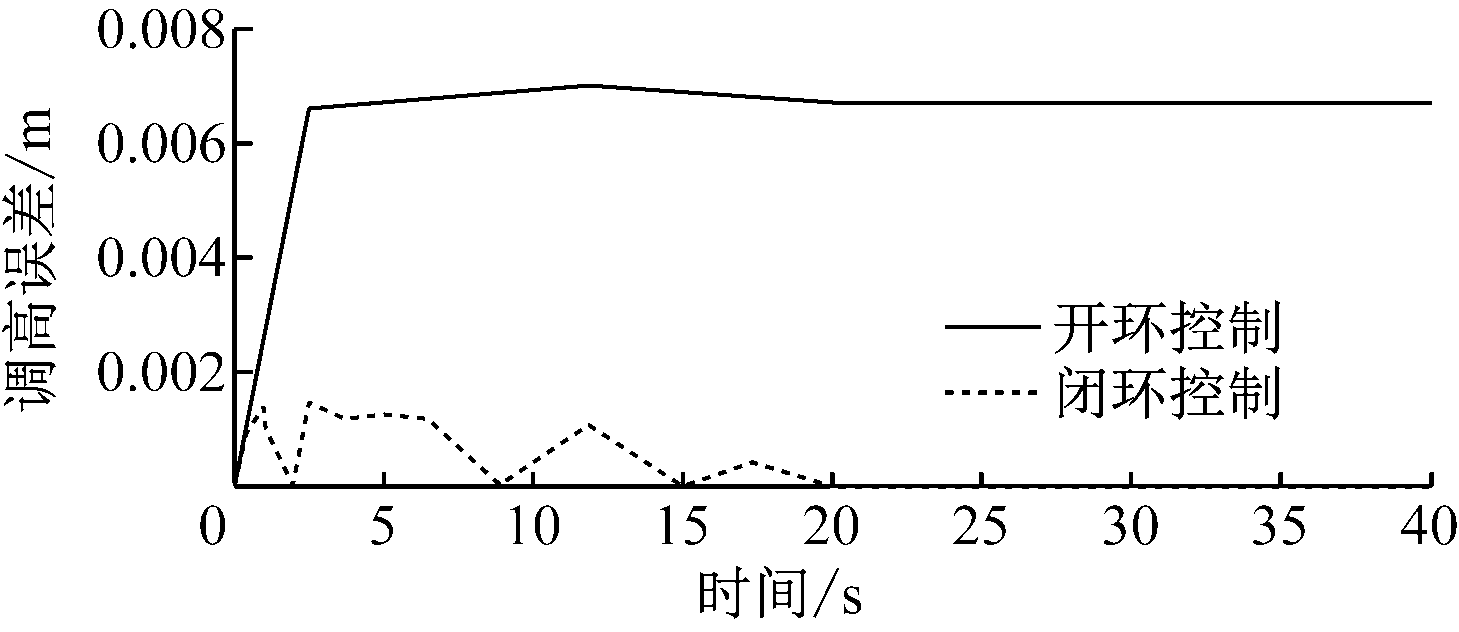
(b) 误差曲线
图6 采煤机滚筒调高系统位置跟踪曲线
Fig.6 Position tracking curve of drum height adjusting system of shearer
从图6可看出,闭环控制滚筒调高系统的位置跟踪吻合度较高,滚筒跟踪误差经模糊自适应PID控制器处理后得以消除,实现了滚筒高度精确调整。
(1) 通过分析采煤机滚筒调高系统中液压机构几何参数关系,建立了滚筒高度与液压缸行程数学模型。
(2) 针对采煤机滚筒调高系统的特性,提出了电液比例换向阀控液压缸滚筒调高系统,建立了电液比例换向阀控液压缸传递函数。结合模糊自适应PID控制器,在Automation Studio软件环境下建立了开环和闭环控制滚筒调高系统仿真模型,分析了系统空载与负载情况下的速度响应及位置跟踪特性,结果表明2种滚筒调高系统都能较准确地跟踪采煤机滚筒轨迹,且闭环控制滚筒调高系统的动态特性和跟踪吻合度更好。
参考文献(References):
[1] 崔大文.基于ADAMS/Hydraulics与Matlab/Simulink的采煤机自动调高系统建模与仿真[J].辽宁工程技术大学学报(自然科学版),2011,30(2):254-257.
CUI Dawen.Modeling and simulation on automatic height adjustment system of coal shearer cutter with ADAMS/Hydraulics and Matlab/Simulink[J].Journal of Liaoning Technical University(Natural Science Edition),2011,30(2):254-257.
[2] 刘庆国,曹鹏.改进型采煤机滚筒调高记忆程控策略[J].工矿自动化,2017,43(1):34-37.
LIU Qingguo,CAO Peng.Improved memory program control strategy of height adjustment of shearer roller[J].Industry and Mine Automation,2017,43(1):34-37.
[3] 赵丽娟,田震,刘旭南,等.薄煤层采煤机滚筒载荷特性仿真分析[J].系统仿真学报,2015,27(12):3102-3108.
ZHAO Lijuan,TIAN Zhen,LIU Xunan,et al.Simulation analysis of load characteristic of thin seam shearer drum[J].Journal of System Simulation,2015,27(12):3102-3108.
[4] 曾庆良,张海忠,王成龙,等.采煤机调高系统的机液协同仿真分析[J].煤炭科学技术,2015,43(1):86-90.
ZENG Qingliang,ZHANG Haizhong,WANG Chenglong,et al.Analysis on mechanic and hydraulic collaborated simulation of height adjusting system in coal shearer[J].Coal Science and Technology,2015,43(1):86-90.
[5] 徐二宝,彭天好,陈晓强,等.基于AMESim的采煤机滚筒调高电液比例控制系统仿真分析[J].机床与液压,2013,41(11):149-151.
XU Erbao,PENG Tianhao,CHEN Xiaoqiang,et al.Simulation analysis of electro-hydraulic proportional control system of shearer drum lifting based on AMESim[J].Machine Tool & Hydraulics,2013,41(11):149-151.
[6] 赵丽娟,王丽.滚筒式采煤机调高机构机液联合仿真研究[J].计算机测量与控制,2014,22(3):823-825.
ZHAO Lijuan,WANG Li.Research of co-simulation of mechanical and hydraulic system of drum shearer height-regulating mechanism[J].Computer Measure-ment & Control,2014,22(3):823-825.
[7] 张春雨.采煤机滚筒调高电液比例控制系统的研究[D].太原:太原理工大学,2014.
[8] 彭天好,张义龙,王光耀,等.采煤机电液比例调高机液耦合仿真研究[J].煤炭科学技术,2016,44(9):127-133.
PENG Tianhao,ZHANG Yilong,WANG Guangyao,et al.Simulation study on hydraulic-mechanical coupling adjusted by electro-hydraulic proportional of coal shearer[J].Coal Science and Technology,2016,44(9):127-133.
[9] 丁浩伦.基于半实物仿真的采煤机自适应调高系统研究[D].太原:太原科技大学,2015.
[10] 刘春生,陈金国,张艳军.采煤机滚筒液压调高比例控制系统的数值模拟[J].黑龙江科技学院学报,2011,21(5):395-399.
LIU Chunsheng,CHEN Jinguo,ZHANG Yanjun.Numerical simulation hydraulic pressure height adjustment proportion control system of shearer's drum[J].Journal of Heilongjiang Institute of Science and Technology,2011,21(5):395-399.
[11] 陈金国.基于单向示范刀采煤机滚筒调高系统的研究[D].哈尔滨:黑龙江科技学院,2012.
[12] 刘春生,陈金国.单向示范刀采煤机记忆截割的模糊自适应PID控制仿真[J].辽宁工程技术大学学报(自然科学版),2013,32(1):85-88.
LIU Chunsheng,CHEN Jinguo.Adaptive fuzzy PID control simulation on memory-cutting of single demonstration cutter shearer[J].Journal of Liaoning Technical University (Natural Science Edition),2013,32(1):85-88.
CHEN Jinguo1, LIU Chunsheng2, FAN Jianhong1, ZHANG Yanjun2, WAN Feng2
(1.School of Mechanical and Electrical Engineering, Putian University, Putian 351100, China; 2.School of Mechanical Engineering, Heilongjiang University of Science and Technology, Harbin 150027, China)
中图分类号:TD632.1
文献标志码:A 网络出版时间:2017-09-27 14:58
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170927.1458.016.html
文章编号:1671-251X(2017)10-0078-05
DOI:10.13272/j.issn.1671-251x.2017.10.016
收稿日期:2017-01-21;
修回日期:2017-07-10;责任编辑李明。
基金项目:国家自然科学基金资助项目(51074068);福建省高校产学合作科技重大项目(2014H6021);福建省激光精密加工工程技术研究中心资助项目(2016JZA017,S20150101)。
作者简介:陈金国(1985-),男,福建莆田人,讲师,博士研究生,主要研究方向为机械设计与液压传动、高效切削理论及刀具技术,E-mail:chen_jinguo@163.com。
引用格式:陈金国,刘春生,范剑红,等.采煤机滚筒调高系统建模及仿真[J].工矿自动化,2017,43(10):78-82. CHEN Jinguo,LIU Chunsheng,FAN Jianhong,et al.Modeling and simulation of drum height adjusting system of shearer[J].Industry and Mine Automation,2017,43(10):78-82.