
1—油箱; 2—负载敏感变量泵; 3—电动机; 4—过滤器;5—单向阀; 6—溢流阀; 7—蓄能器; 8—电液比例换向阀; 9—液压缸; 10—位移传感器; 11—负载加载单元
图1 巷道支护支架液压缸位置闭环控制系统原理
Fig.1 Principle of closed-loop control system for hydraulic cylinder position of roadway support
王帆, 赵继云
(中国矿业大学 机电工程学院, 江苏 徐州 221116)
摘要:针对煤矿巷道支护支架液压缸位置高精度控制和节能的需求,基于负载敏感原理设计了一种巷道支护支架液压缸位置闭环控制系统。分析了系统工作原理,建立了系统数学模型,利用AMESim软件搭建了系统仿真模型。仿真结果表明:负载敏感变量泵输出压力能稳定自适应最高负载压力变化,从而达到节能的目的;液压缸实际位移能快速、平稳地跟踪给定位移,液压缸位置控制精度在0.6 mm以内,满足煤矿巷道支护支架液压缸位置高精度控制需要。
关键词:煤矿巷道; 支护支架; 液压缸位置; 闭环控制; 负载敏感
Abstract:For requirements of high precision control and energy saving of hydraulic cylinder position of support in coal mine roadway, a closed-loop control system for hydraulic cylinder position of roadway support was designed based on load sensing principle. Working principle of the system was analyzed, mathematical model of the system was established and simulation model of the system was built by use of AMESim software. The simulation results show that outlet pressure of load sensing variable pump can stably adapt to the maximum load pressure to realize energy saving, and actual hydraulic cylinder displacement can quickly and smoothly track given displacement within 0.6 mm error, which meet high precision control requirement of hydraulic cylinder position of support in coal mine roadway.
Keywords:coal mine roadway; support; hydraulic cylinder position; closed-loop control; load sensing
煤矿巷道支护支架是保证工作面安全的关键设备之一[1]。在支架升降过程中,液压缸需要承受极端负载和很大的偏载,因而要求实现液压缸的精确位置控制,以防止支架卡死[2-3]。
液压缸位置控制可分为开环控制和闭环控制2种方式[4]:开环控制不存在反馈环节,具有结构简单、成本低等优势,然而开环控制精度低且不能及时调整误差[5-6];闭环控制存在反馈环节,适用于精度要求高的场合[7-8]。当前对液压缸位置闭环控制的研究往往忽视了液压系统能量效率过低的问题[9-12]。本文基于负载敏感原理[13],设计了一种巷道支护支架液压缸位置闭环控制系统,既可满足液压缸位置高精度控制需要,又兼具节能效果。
巷道支护支架液压缸位置闭环控制系统原理如图1所示。通过负载敏感变量泵内集成的压力补偿阀使负载敏感变量泵输出压力与最高负载压力间的差值保持恒定,从而使负载敏感变量泵输出功率与液压系统需求自动匹配,不会产生多余的能量损耗,达到节能目的。系统内单向阀可防止油液使负载敏感变量泵倒转,蓄能器可降低负载敏感变量泵的压力脉动,提高系统稳定性,改善系统动态性能。
1—油箱; 2—负载敏感变量泵; 3—电动机; 4—过滤器;5—单向阀; 6—溢流阀; 7—蓄能器; 8—电液比例换向阀; 9—液压缸; 10—位移传感器; 11—负载加载单元
图1 巷道支护支架液压缸位置闭环控制系统原理
Fig.1 Principle of closed-loop control system for hydraulic cylinder position of roadway support
系统根据控制器预设的液压缸位移信号使电液比例换向阀的阀芯移动,进而控制液压缸运动,同时位移传感器将液压缸位移信号反馈至控制器,与预设的位移信号进行比较后得到位移偏差信号,控制器根据该位移偏差信号控制电液比例换向阀的阀芯移动,进而控制液压缸位移,直至位移偏差信号为零。控制器采用简单、可靠且具有较强鲁棒性的PID控制算法。
以液压缸活塞杆伸出为分析对象,其受力模型如图2所示。
活塞杆的力平衡方程为
(1)
式中:p1,p2分别为无杆腔和有杆腔的压力;A1,A2分别为无杆腔和有杆腔的有效作用面积;m为活塞及负载的总质量;xp为活塞位移;Bp为黏性阻尼系数;K为弹簧刚度;FL为负载力。

图2 液压缸活塞杆伸出受力模型
Fig.2 Mechanical model of piston rod extending of hydraulic cylinder
流出电液比例换向阀阀口的流量q1和流入电液比例换向阀阀口的流量q2分别为
(q1=CdWxv![]()
q2=CdWxv![]()
(2)
式中:Cd为综合流量系数;W为阀口面积梯度;xv为电液比例换向阀的阀芯位移;ρ为油液密度;ps为油源压力。
电液比例换向阀阀口流量可表示为
q=CdWxv![]()
(3)
式中Δp为电液比例换向阀两端压差。
将式(3)线性化,可得负载连续流量:
qL=Cqxv-CcpL
(4)
式中:Cq为电液比例换向阀位移系数;Cc为流量-压力系数;pL为负载压力。
流入液压缸无杆腔的流量即流出电液比例换向阀阀口的流量,流出液压缸有杆腔的流量即流入电液比例换向阀阀口的流量,因此q1,q2可另表示为
(![]()
![]()
(5)
式中:Ci,Ce分别为内泄和外泄系数;V1,V2分别为无杆腔和有杆腔的体积;βe为油液等效弹性模量。
从液压缸流量的角度出发,负载连续流量可另表示为
(6)
式中:Cte为油液等效泄漏系数,Cte=![]() Ci+
Ci+![]() Ce,n为液压缸有杆腔和无杆腔的有效作用面积比,n=
Ce,n为液压缸有杆腔和无杆腔的有效作用面积比,n=![]() =
=![]() ≤1;Vt为油液等效体积,Vt=
≤1;Vt为油液等效体积,Vt=![]() 。
。
对式(1)、式(4)、式(6)进行拉普拉斯变换,可得传递函数为
Y(s)=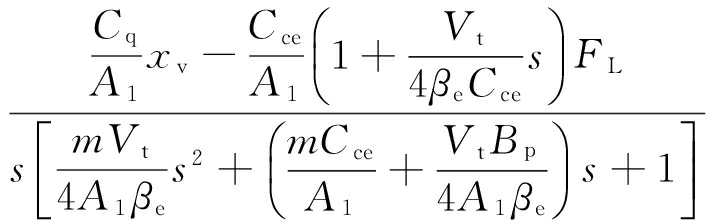
(7)
式中Cce=Cc+Cte。
由式(7)可知,液压缸位置闭环控制系统具有非线性、时变的特征,液压缸位移主要与电液比例换向阀的阀芯位移和负载力相关。
在AMESim仿真环境[14-15]下建立巷道支护支架液压缸位置闭环控制系统仿真模型,如图3所示。仿真模型参数设置:负载敏感变量泵额定排量为71 mL/r;电动机额定转速为1 500 r/min;电液比例换向阀额定电流为40 mA,固有频率为80 Hz,阻尼比为0.8,各通路流量为1 L/min,压降为0.1 MPa;液压缸活塞直径为80 mm,活塞杆直径为60 mm,液压缸行程为350 mm,油腔死区体积为10 cm3;油液密度为950 kg/m3,等效弹性模量为900 MPa,综合流量系数为0.7,等效泄漏系数为6×10-12,黏性阻尼系数为750 N·s/m。
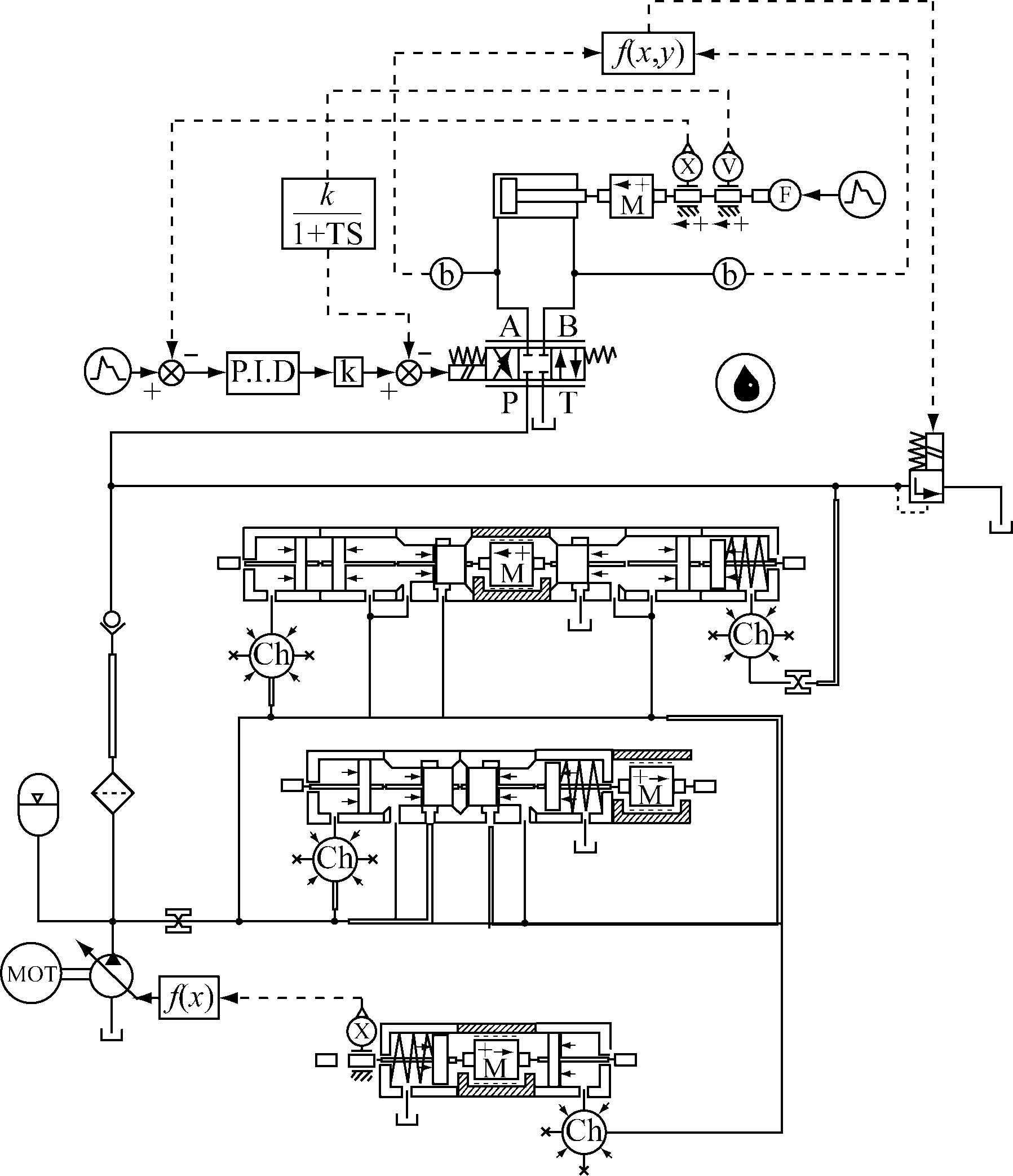
图3 巷道支护支架液压缸位置闭环控制系统仿真模型
Fig.3 Simulation model of closed-loop control system for hydraulic cylinder position of roadway support
最高负载压力变化时,仿真得到负载敏感变量泵输出压力曲线,如图4所示。可看出在最高负载压力变化的情况下,负载敏感变量泵输出压力与之保持稳定自适应,二者差值恒定。

图4 负载敏感变量泵输出压力曲线
Fig.4 Outlet pressure curve of load sensing variable pump
设置仿真时间为10 s,采样间隔为0.01 s;预设的液压缸位移信号在0~5.5 s从0上升至350 mm,5.5~7 s保持350 mm不变,7~10 s从350 mm下降至115 mm;放大器增益为480;低通滤波器的时间常数为0.02 s,增益为40;PID控制算法的比例系数为8、积分系数为0.8、微分系数为0.25。
仿真得到液压缸位移跟踪、液压缸位移跟踪误差曲线,分别如图5、图6所示。

图5 液压缸位移跟踪曲线
Fig.5 Displacement tracking curve of hydraulic cylinder
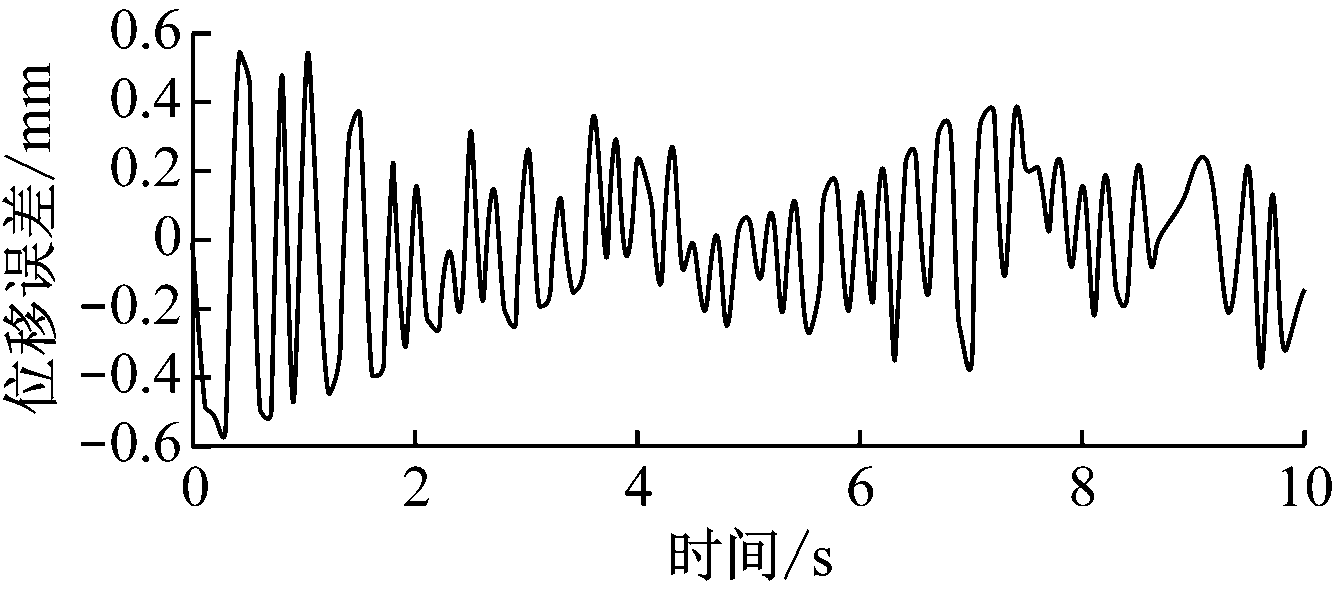
图6 液压缸位移跟踪误差曲线
Fig.6 Displacement tracking error curve of hydraulic cylinder
从图5可看出,液压缸实际位移能迅速跟踪给定位移,表明系统响应速度快,且跟踪过程中产生的超调很小,液压缸运动过程较平稳。从图6可看出,位移跟踪误差最大值约为0.6 mm,即液压缸位置控制精度在0.6 mm以内。
在AMESim仿真环境下对巷道支护支架液压缸位置闭环控制系统进行了仿真分析,结果表明:负载敏感变量泵输出压力能稳定自适应最高负载压力变化,从而达到节能的目的;液压缸实际位移能快速跟踪给定位移,跟踪过程中产生的超调很小且运行平稳,液压缸位置控制精度在0.6 mm以内,满足煤矿巷道支护支架液压缸位置高精度控制需要。
参考文献(References):
[1] 褚言军.基于PM31系统的液压支架成组多架同步自动控制的研究[J].工矿自动化,2011,37(6):73-75.
CHU Yanjun.Research of synchronously automatic control of grouped multi-hydraulic supports based on PM31 system[J]. Industry and Mine Automation,2011,37(6):73-75.
[2] YANG Huayong,SHI Hu,GONG Guofang,et al.Electro-hydraulic proportional control of thrust system for shield tunneling machine[J].Automation in Construction,2009,18(7):950-956.
[3] 陈加胜,高明中.快速掘进配套临时支护液压支架设计[J].煤矿机械,2011,32(2):12-15.
CHEN Jiasheng,GAO Mingzhong.Hydraulic supports design of temporary support for quick tunneling[J].Coal Mine Machinery,2011,32(2):12-15.
[4] HUANG Guoqin,CHEN Yu,YU Jin.Simulation analysis in cylinder hydraulic synchronous control system of main drive system of heavy forging hydraulic press[J].Advanced Materials Research,2013,765/766/767:1899-1902.
[5] 宋君君,于少娟,彭昌.基于AMEsim的自适应控制在电液力伺服系统上仿真研究[J].工业控制计算机,2012,25(6):34-36.
SONG Junjun,YU Shaojuan,PENG Chang.Simulation of electric hydraulic servo system controlled adaptive based on AMEsim[J].Industrial Control Computer,2012,25(6):34-36.
[6] 柳波,师辉宇,黄杰,等.运用模糊控制的电液同步控制系统研究[J].现代制造工程,2010(7):113-117.
LIU Bo,SHI Huiyu,HUANG Jie,et al.Research on electro-hydraulic synchronous control system based on fuzzy control[J].Modern Manufacturing Engineering,2010(7):113-117.
[7] 刘海丽,李华聪.液压机械系统建模仿真软件AMESim及其应用[J].机床与液压,2006(6):124-126.
LIU Haili,LI Huacong.Modeling and simulation software AMESim and its application for hydraulic-mechanic system[J].Machine Tool & Hydraulics,2006(6):124-126.
[8] YANG Huayong,SHI Hu,GONG Guofang.Motion control of thrust system for shield tunneling machine[J].Journal of Central South University,2010,17(3):537-543.
[9] 齐晓苗.巷道用临时支护设备电液控制系统研究[D].阜新:辽宁工程技术大学,2012.
[10] HAN H Y,WANG J,HUANG Q X.Analysis of unsymmetrical valve controlling unsymmetrical cylinder stability in hydraulic leveler[J].Nonlinear Dynamics,2012,70(2):1199-1203.
[11] 郭文孝.综掘面临时支护支架组液压控制系统的设计[J].煤炭工程,2015,47(9):28-30.
GUO Wenxiao.Design on hydraulic control system of temporary support group in fully mechanized excavation face[J].Coal Engineering,2015,47(9):28-30.
[12] XIAO Juliang,WANG Guodong,SONG Weike.Electro-hydraulic proportional synchronous control system of ring gate for hydraulic turbine[C]//Asia-Pacific Power and Energy Engineering Conference,Wuhan,2009:1-5.
[13] 苏东海,韩国惠,于江华,等.液压同步控制系统及其应用[J].沈阳工业大学学报,2005,27(4):364-367.
SU Donghai,HAN Guohui,YU Jianghua,et al. Design and application of hydraulic synchronization control system[J].Journal of Shenyang University of Technology,2005,27(4):364-367.
[14] 付永领.AMESim系统建模和仿真——从入门到精通[M].北京:北京航空航天大学出版社,2006.
[15] 付永领,祁晓野.LMS Imagine.Lab AMESim系统建模和仿真参考手册[M].北京:北京航空航天大学出版社,2011.
WANG Fan, ZHAO Jiyun
(School of Mechatronic Engineering, China University of Mining and Technology, Xuzhou 221116, China)
中图分类号:TD353
文献标志码:A 网络出版时间:2017-09-27 14:55
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170927.1455.015.html
文章编号:1671-251X(2017)10-0074-04
DOI:10.13272/j.issn.1671-251x.2017.10.015
收稿日期:2017-06-20;
修回日期:2017-09-07;责任编辑盛男。
基金项目:山西省煤基重点科技攻关项目(MJ2014-03)。
作者简介:王帆(1989-),男,四川绵阳人,博士研究生,主要研究方向为液压传动与控制,E-mail:wangfan36@sina.com。
引用格式:王帆,赵继云.巷道支护支架液压缸位置闭环控制系统设计[J].工矿自动化,2017,43(10):74-77. WANG Fan,ZHAO Jiyun.Design of closed-loop control system for hydraulic cylinder position of roadway support[J].Industry and Mine Automation,2017,43(10):74-77.