图1 基于捷联惯导的采煤机定位原理
Fig.1 Shearer positioning principle based on strapdown inertial navigation
夏婷, 李威, 王超, 李雨辰
(中国矿业大学 机电工程学院, 江苏 徐州 221116)
摘要:通过介绍国内外综采工作面采煤机定位技术发展现状,分析了采煤机常规定位技术、采煤机捷联惯导定位技术、采煤机捷联惯导定位误差补偿技术、基于捷联惯导和其他方法的采煤机组合定位技术的特点,指出研究捷联惯导的定位解算策略、探寻无线传感器网络与捷联惯导的紧耦合融合策略、研究复杂振动及多径效应下采煤机空间定位技术是采煤机定位技术的发展趋势。
关键词:煤炭开采; 综采工作面; 智能化开采; 采煤机定位; 捷联惯导; 组合定位
Abstract:On the basis of development status of shearer positioning technology on fully mechanized coal mining face at home and abroad, characteristics of conventional shearer positioning technology, shearer positioning technology based on strapdown inertial navigation, shearer positioning error compensation technology based on strapdown inertial navigation, and shearer positioning technology based on combination of strapdown inertial navigation and other methods were analyzed. Development trends of shearer positioning technology were pointed out, which were researching positioning calculation strategy of strapdown inertial navigation, exploring tight coupling fusion strategy between wireless sensor network and strapdown inertial navigation, and studying shearer spatial positioning technology under complex vibration and multipath effect.
Keywords:coal mining; fully mechanized coal mining face; intelligent mining; shearer positioning; strapdown inertial navigation; combined positioning
煤矿井下综采工作面的自动化和智能化是实现矿井无人化、安全高效开采的关键步骤[1],也是发展数字矿山、提高矿井机电装备信息化和自动化水平的重要组成部分。为实现综采工作面的少人化和无人化[2-3],综采工作面“三机”即采煤机、刮板输送机和液压支架的智能化是关键技术之一,而采煤机定位是首先需要解决的问题。笔者通过研究国内外采煤机定位技术,总结了采煤机定位技术的现状,指出了采煤机定位技术的进一步发展方向,为实现综采工作面安全、高效、智能化开采提供技术参考。
刘清等[4]提出了通过红外对射信号进行采煤机定位,具体原理:在采煤机机身安装红外发射装置,在液压支架上安装红外接收装置,采煤机运行过程中红外发射装置定向发射广角脉冲,液压支架上红外接收装置接收信号,对接收信号的强弱进行分析,从而判断采煤机具体位置。但受底板不平整、粉尘及遮挡等影响,红外接收装置有时会接收不到采煤机上红外发射装置发出的脉冲信号,在自动化采煤过程中造成“跳架”现象。红外定位技术在动态测量方面有很大局限性,并且安装复杂,总体定位精度不高,实际应用受到限制。
张连昆等[5]将超声波发射装置安装在工作面巷道中,当采煤机经过时机身将反射超声波,根据各位置超声波传感器监测状态可确定采煤机位置。但煤矿井下环境恶劣,如果工作面较长,超声波声衰较大,造成回波误差大,甚至无法收到回波,导致采煤机定位失效。
邓文革等[6]提出了齿轮计数法:对采煤机行走齿轮的转动圈数进行计数,将圈数乘以齿轮周长,计算出采煤机行程,然后根据液压支架间距推算出采煤机位于何处液压支架,从而确定采煤机在工作面的位置。齿轮计数法只能检测采煤机一维运动,而采煤机实际运动轨迹是三维的,所以该方法只能估测采煤机在工作面的大致位置,并且齿轮计数误差会累加,加上无法准确获知液压支架间距,因此,该方法不能满足采煤机实时定位精度要求。
无线定位技术是通过对接收的电磁波参数(包括传输时间、到达角、幅度和相位等)进行测量,采用特定算法来判断被测物体位置[7]。受煤矿恶劣环境影响,无线定位技术应用时存在定位数据不稳定的问题。此外,井下无线信道模型还不完善,无法获得采煤机精确位置。
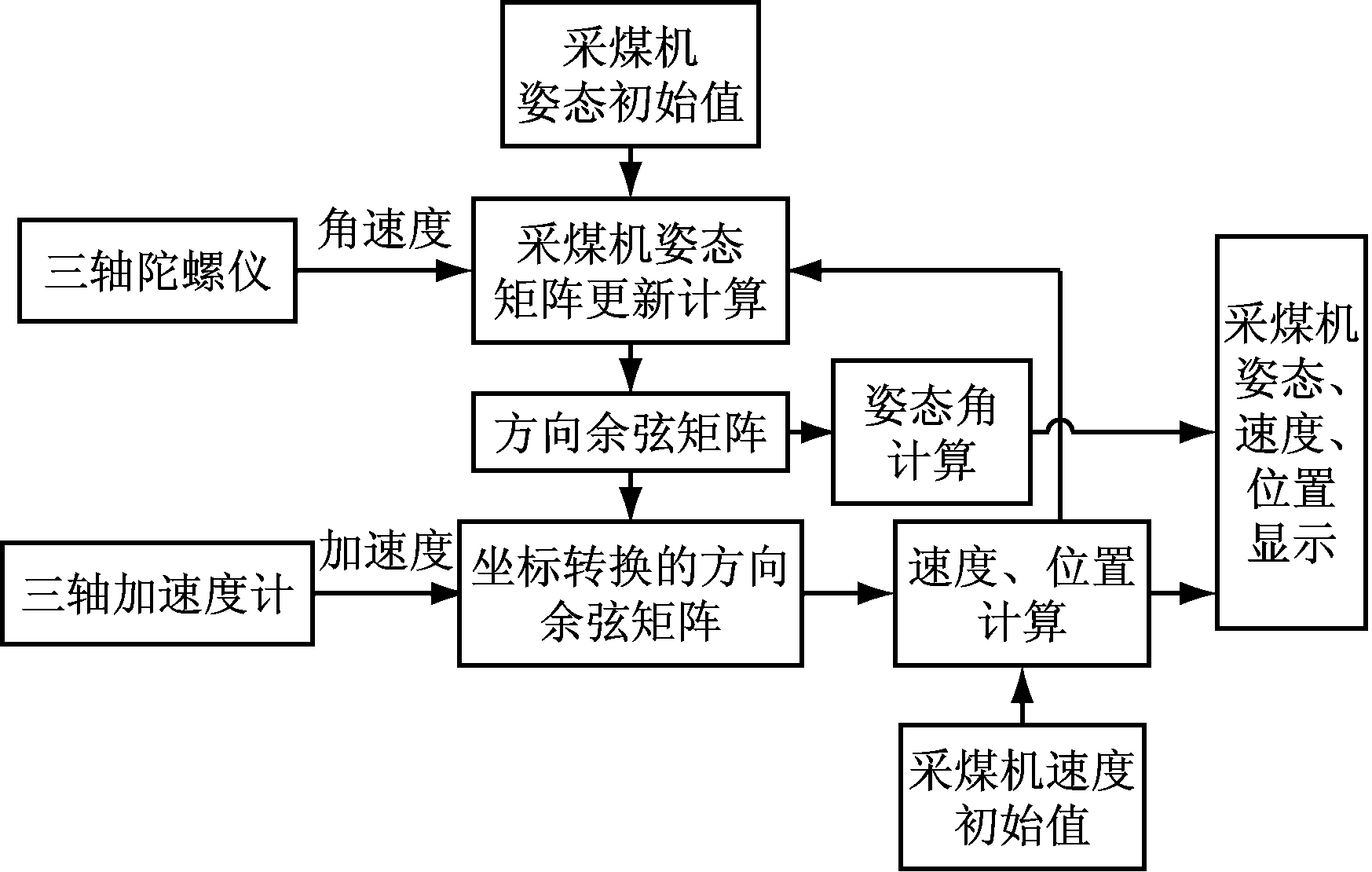
捷联惯导系统(Strapdown Inertial Navigation System,SINS)[8]是一种不依赖任何外部信息的自主式导航系统。它将三轴陀螺仪和三轴加速度计等惯性敏感器件直接固定在运动载体上,利用陀螺仪和加速度计实时测量运动载体的三轴角速度和三轴加速度,并结合运动载体初始惯性信息,通过高速积分获得运动载体的姿态、速度及位置等信息[9]。基于捷联惯导的采煤机定位原理如图1所示。SINS具有安装简便、可靠,能够利用载体自身惯性信息进行定位,不向外辐射能量等特点,因此,许多学者对SINS用于采煤机定位的可行性进行了深入研究。
图1 基于捷联惯导的采煤机定位原理
Fig.1 Shearer positioning principle based on strapdown inertial navigation
D. C. Reid等[10-11]介绍了SINS的发展对长壁采煤过程自动化的促进作用,证明了SINS能够成功应用于采煤机定位中,可准确测量长壁采煤机的三维路径。
樊启高等[12]提出了一种基于捷联惯导的采煤机定位方法。该方法运用SINS对采煤机的实时线性加速度和实时角速度进行测量,得到采煤机在载体坐标系下的加速度和角速度,然后进行坐标变换,构建采煤机在惯性坐标系中的导航方程,通过对加速度和角速度进行积分运算,获得采煤机位置和姿态数据。该方法具有完全自主、可靠性高等特点,但由于SINS直接固连在采煤机机身上,而采煤机工作环境恶劣,随机振动较大,对定位精度影响很大。
李秀凤等[13]设计了基于捷联惯导的采煤机定位系统,采用LSM330芯片和GS1011模块构成惯导终端,测出采煤机的三轴加速度和三轴角速度,并将处理后的数据通过WiFi上传到井上监控中心,然后利用四元数法进行姿态更新,进而得到采煤机的位置和姿态信息。该方法具有实时性和自主性强的特点,能够准确捕捉采煤机运动姿态,具有较高的精度。但在载体运动变化比较剧烈的弯曲段,该方法定位精度不高。
任思颖[14]应用模块化SINS,通过对采煤机工作状态下的三轴加速度及角速度进行测定,结合四元数法对数据进行处理和运算,从而得到采煤机的运动状态。该方法满足采煤机定位的实时性和自主性要求,提高了采煤机定位精度,但在采煤机运行路径弯曲段定位精度不高。
捷联惯导定位技术具有完全自主性、保密性特点,随着激光、光纤陀螺技术的发展,SINS已经日渐完善,而且在初始对准、位姿解算和误差补偿方面取得了大量成果,但SINS存在的固有缺陷,如累积误差和位置漂移等是难点问题。因此,SINS不能长时间独立工作,而且初始对准所需时间较长。通常解决这一问题的途径有2个:通过误差补偿来提高SINS算法解算精度;采用组合定位技术。
传统的捷联惯导定位误差较大且随着时间累积无法消除,而且SINS安装偏差、载体的角振动和线振动引起的误差都会影响定位精度。因此,对误差进行补偿是提高定位精度的有效手段。
Y.Yuksel等[15]建立了捷联惯导的误差解算模型,并且利用Allan方差理论对捷联惯导误差进行低通滤波,增加了捷联惯导的鲁棒性。
Lai Jizhou等[16]提出了基于正弦角振动和随机角振动的组合振动模型,采用多子样算法对圆锥误差进行补偿。
Fan Qigao等[17]提出了一种采煤机定位误差分析方法。利用四元数法建立了采煤机状态方程,通过扩展卡尔曼滤波(Extended Kalman Filter,EKF)方法来估计和调整角度误差及采煤机速度,在采煤机状态方程的基础上建立观测方程。实验结果表明,EKF方法对于采煤机定位的初始对准十分可靠。
郭晓晶等[18]利用卡尔曼滤波算法对捷联惯导定位器获得的数据进行处理,通过反复修正设定状态参数与实际状态参数之间的误差,实现对采煤机的精确定位。通过迭代递归方法减少定位误差,有效避免了采煤机定位时出现的误差累积现象,采煤机定位更加准确。
张英[19]提出了一种基于混合高斯平方根无迹卡尔曼滤波的采煤机定位方法,来解决量测噪声为非高斯分布时的采煤机定位问题。该方法中滤波过程的量纲输出是捷联惯导定位信息,根据运动状态方程和量测方程估计出采煤机的状态向量,作为滤波得到的最优定位结果。在耗时相同的情况下,混合高斯平方根无迹卡尔曼滤波的滤波精度高于混合高斯滤波。该方法对采煤机具有较高的定位精度和较强的实时性。
捷联惯导存在漂移误差,且加速度双重积分会使误差随时间快速累积。捷联惯导定位精度随着采煤机工作时间的增加而急剧下降,而且煤层存在倾角,长壁综采工作面采煤机需要三维定位。因此,采用组合定位技术可弥补捷联惯导定位的不足,提高定位精度。
应葆华等[20]提出了一种SINS/WSN(Wireless Sensor Network,无线传感器网络)采煤机组合定位方法。采用SINS监测采煤机姿态、速度及位置等参数,结合无线锚节点与移动节点几何位置,建立了SINS与WSN融合模型,采用C语言、Matlab和SQL交互式软件构建了采煤机组合定位系统,其原理如图2所示。该方法利用WSN位置对SINS位置进行周期性校正,改善了捷联惯导的累积误差问题。采用SINS/WSN组合定位能够对采煤机进行位姿同步跟踪,大大减小了采煤机的平均定位误差,得到采煤机实时、可靠的位置和姿态信息。
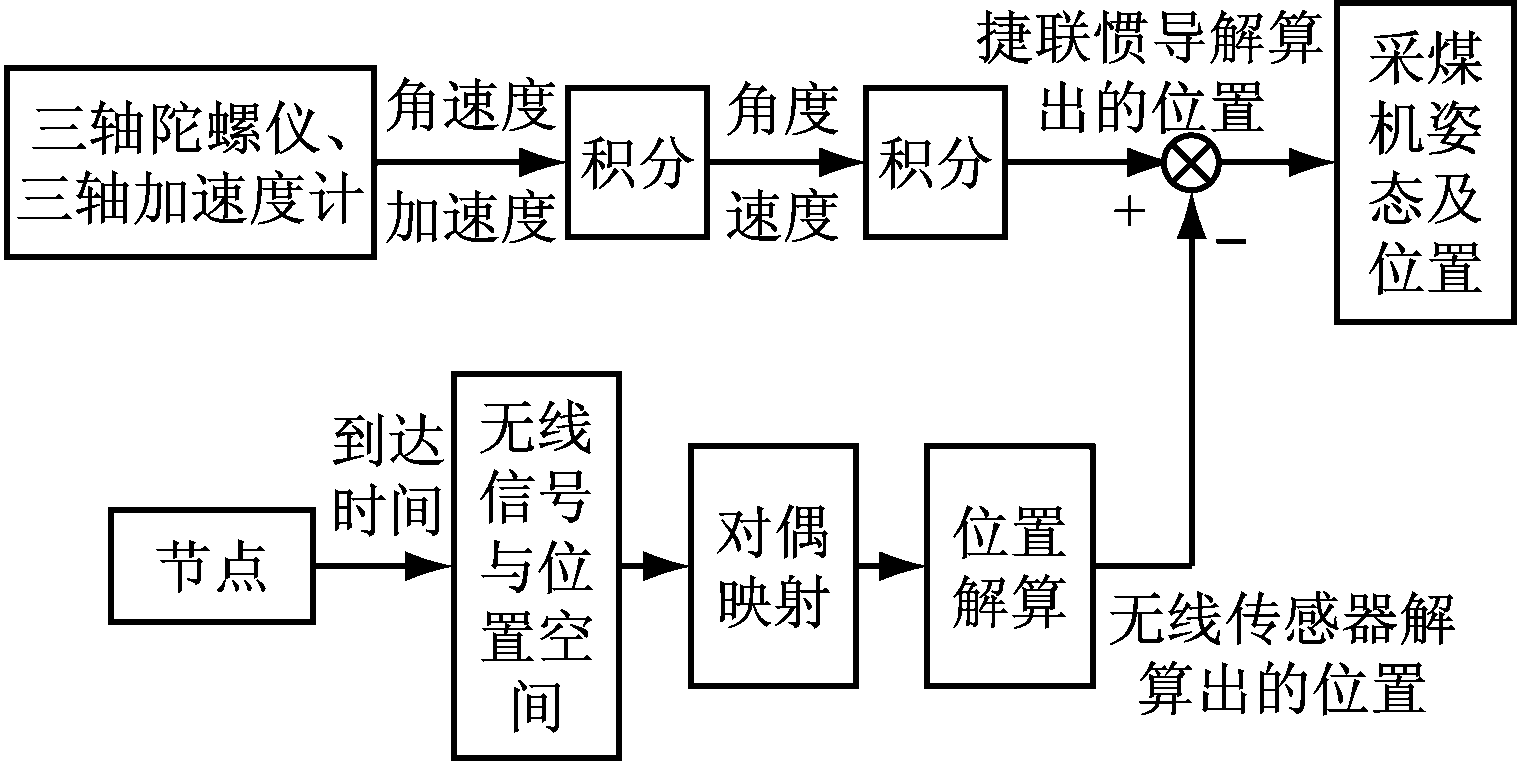
图2 SINS/WSN采煤机组合定位系统原理
Fig.2 Principle of SINS/WSN shearer integrated positioning system
罗成名[21]提出了采用SINS与CWSN(Chain-Type Wireless Sensor Network,链式无线传感器网络)组合来实现采煤机的定位。以CWSN为基础,根据无线节点能量损耗模型研究了链式网络节点覆盖路由策略,分析了非线性无线信号集之间的相关性,推导了约束总体最小二乘方程,并求解了移动目标位置;基于无线测距误差、锚节点基准误差及节点布置密度与采煤机定位精度之间的变化规律,构建了SINS/CWSN组合定位下采煤机位置解算紧耦合模型,实现了在SINS和CWSN失效时采煤机位置自适应校准。SINS/CWSN协同定位具有较高的精度和可靠性,能够满足综采工作面“三机”联动过程中对采煤机定位精度的要求。
葛世荣等[22]开发了基于工作面GIS(Geographic Information System,地理信息系统)的采煤机定位装置,可实时测量采煤机行走轨迹、截割轨迹及其与煤层顶底板关系,实现了采煤机的三维定位,而且能够感知煤层地质信息,为实现采煤机根据地质条件自动调高提供了有力支撑。但姿态角测量存在误差,使得每次坐标变换存在一定误差,航位推算造成误差累积,而且各种激发波互相叠加、干涉等,给数据的处理和分析带来了一定影响。可以通过提高惯性测量装置的精度和震波CT的探测精度,来进一步降低误差。
李昂等[23]介绍了一种基于SINS与轴编码器组合的采煤机定位方法,构建了采煤机定位方程。利用SINS测出采煤机的实时姿态,轴编码器测出采煤机的位移增量,根据采煤机的实时姿态进行坐标转换,得到与地球固连的坐标系内位置,实现采煤机的三维定位。SINS/轴编码器组合定位原理如图3所示。该方法有效抑制了采煤机捷联惯导定位误差随时间累积的趋势,提高了采煤机定位精度。
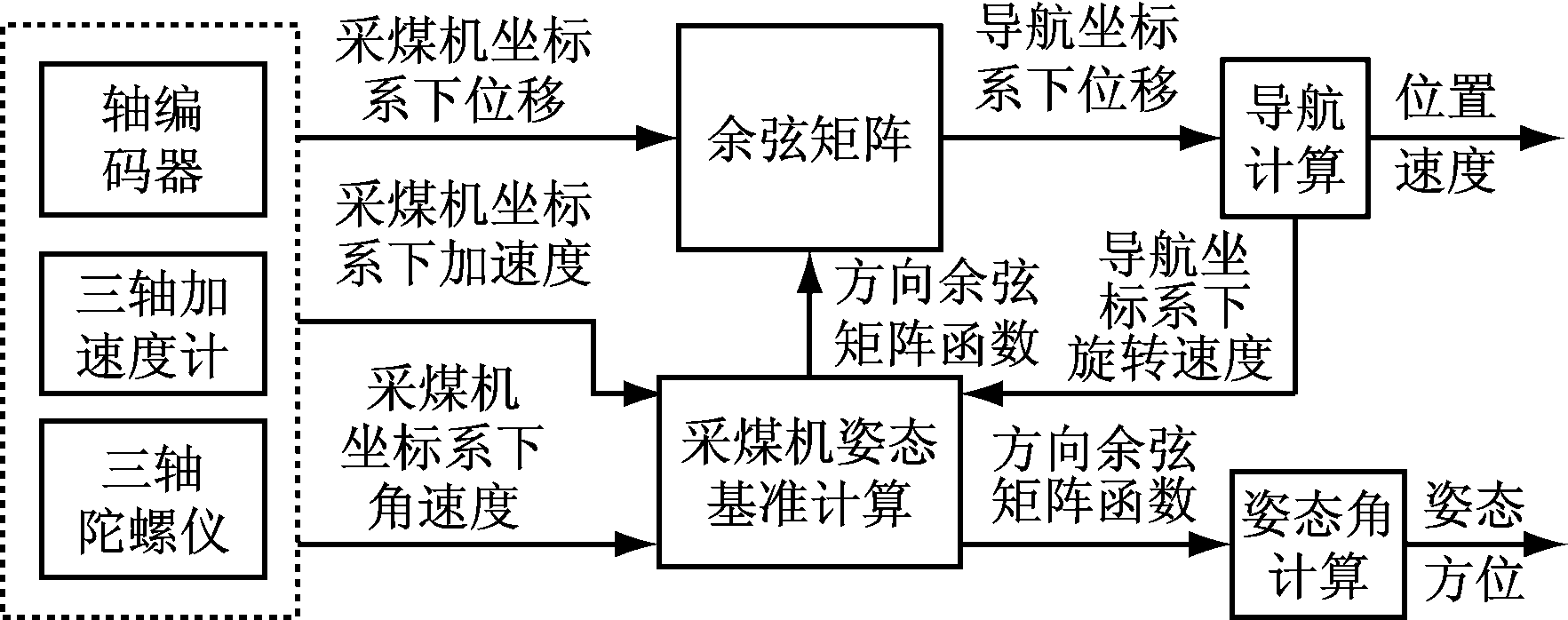
图3 SINS/轴编码器组合定位原理
Fig.3 Principle of SINS/axis encoder integrated positioning
采煤机定位技术是实现综采工作面少人化或无人化开采的关键。当前采煤机定位技术仍存在精度低、可靠性差、自动化程度不高等问题,因此,采煤机定位技术未来的发展趋势和研究重点将主要集中在以下方向:
(1) 开展捷联惯导在复杂、高动态环境下的定位解算策略研究,探寻捷联惯导定位系统中外界动态参数对解算累积误差的影响机理,进一步提高捷联惯导的定位精度。
(2) 在深入研究WSN定位机制的过程中,探寻WSN与捷联惯导更深层次的紧耦合融合策略,利用相对稳定的捷联惯导来反馈校正WSN的解算机制,进一步提高组合定位的稳定性和容错性。
(3) 井下环境恶劣,设备振动干扰复杂,WSN多径效应明显,仍有很多相关因素对组合定位精度产生影响,需进一步研究复杂振动及多径效应下采煤机空间定位技术,提高组合定位精度。
参考文献(References):
[1] 耿泽昕,宋建成,许春雨,等.自动化采煤控制系统设计[J].工矿自动化,2016,42(4):11-14.
GENG Zexin,SONG Jiancheng,XU Chunyu,et al.Design of automatic coal mining control system[J].Industry and Mine Automation,2016,42(4):11-14.
[2] 付国军.自动化综采工作面概念探讨[J].工矿自动化,2014,40(6):26-30.
FU Guojun.Probe on concept of automatic fully-mechanized coal mining face[J].Industry and Mine Automation,2014,40(6):26-30.
[3] 黄曾华.综采工作面自动化控制技术的应用现状与发展趋势[J].工矿自动化,2013,39(10):17-21.
HUANG Zenghua.Application status and development tendency of automation control technology for fully mechanized working face[J].Industry ang Mine Automation,2013,39(10):17-21.
[4] 刘清,魏文艳.基于红外检测装置的采煤机定位算法研究[J].机械工程与自动化,2013(6):157-159.
LIU Qing,WEI Wenyan.Shearer localization algorithm based on position detection of shearer by infrared[J].Mechanical Engineering and Automation,2013(6):157-159.
[5] 张连昆,谢耀社,周德华.基于超声波技术的采煤机位置监测系统[J].煤炭科学技术,2010,38(5):104-106.
ZHANG Liankun,XIE Yaoshe,ZHOU Dehua.Position monitoring and measuring system of coal shearer based on ultrasonic wave technology[J].Coal Science and Technology,2010,38(5):104-106.
[6] 邓文革.采煤机位置监测装置的原理与应用[J].煤矿机械,2007,28(6):118-119.
DENG Wenge.Principle and application of shearer position monitoring device[J].Coal Mine Machinery,2007,28(6):118-119.
[7] 王雪莉,卢才武,顾清华,等.无线定位技术及其在地下矿山中的应用[J].金属矿山,2009,39(4):121-125.
WANG Xueli,LU Caiwu,GU Qinghua,et al.Wireless localization technique and its application in underground mines[J].Metal Mine,2009,39(4):121-125.
[8] 杨海,李威,罗成名,等.基于捷联惯导的采煤机定位定姿技术实验研究[J].煤炭学报,2014,39(12):2550-2556.
YANG Hai,LI Wei,LUO Chengming,et al.Experimental study on position and attitude technique for shearer using SINS measurement[J].Journal of China Coal Society,2014,39(12):2550-2556.
[9] YANG Hai,LI Wei,LUO Chengming,et al.Research on error compensation property of strapdown inertial navigation system using dynamic model of shearer[J].IEEE Access,2017,4(4):2045-2055.
[10] REID D C,HAINSWORTH D W,RALSTON J C,et al.Shearer guidance: a major advance in longwall mining[J].Springer Tracts in Advanced Robotics,2006,24:469-476.
[11] RALSTON J C,REID D C,DUNNM M T,et al.Longwall automation: delivering enabling technology to achieve safer and more productive underground mining[J].International Journal of Mining Science and Technology,2015,25(6):865-876.
[12] 樊启高,李威,王禹桥,等.一种采用捷联惯导的采煤机动态定位方法[J].煤炭学报,2011,36(10):1758-1761.
FAN Qigao,LI Wei,WANG Yuqiao,et al.A shearer dynamic positioning method using strap down inertial navigation[J].Journal of China Coal Society,2011,36(10):1758-1761.
[13] 李秀凤,吴静然,刘晓文.基于捷联惯导的采煤机定位系统研究[J].工矿自动化,2013,39(11):53-56.
LI Xiufeng,WU Jingran,LIU Xiaowen.Research of shearer positioning system based on strapdown inertial navigation system[J].Industry and Mine Automation,2013,39(11):53-56.
[14] 任思颖.基于捷联惯导及四元数法的采煤机定位方法研究[J].煤矿机械,2014,35(8):125-128.
REN Siying.Research of coal winning machine positioning based on strapdown inertial navigation and quaternion method[J].Coal Mine Machinery,2014,35(8):125-128.
[15] YUKSEL Y,EL-SHEIMY N,NOURELDIN A.Error modeling and characterization of environmental effects for low cost inertial MEMS units[C]//IEEE Position Location and Navigation Symposium,Indian Wells,2010:598-612.
[16] LAI Jizhou,LYU Pin,LIN Jianye,et al.Noncommutativity error analysis of strapdown inertial navigation system under the vibration in UAVs[J].International Journal of Advanced Robotic Systems,2012,9(136):1-8.
[17] FAN Qigao,LI Wei,LUO Chengming.Error analysis and reduction for shearer positioning using the strapdown inertial navigation system[J].International Journal of Computer Science Issues,2012,9(5):49-54.
[18] 郭晓晶,田华,李明君.基于卡尔曼滤波算法的采煤机惯导定位方法[J].煤炭技术,2015,34(7):278-281.
GUO Xiaojing,TIAN Hua,LI Mingjun.INS positioning method of shearer based on Kalman filter[J].Coal Technology,2015,34(7):278-281.
[19] 张英.基于混合高斯SRUKF的采煤机定位方法[J].矿山机械,2016,44(9):11-15.
ZHANG Ying.Shearer locating method based on mixture Gaussian SRUKF[J].Mining & Processing Equipment,2016,44(9):11-15.
[20] 应葆华,李威,罗成名,等.一种采煤机组合定位系统及实验研究[J].传感技术学报,2015,28(2):260-264.
YING Baohua,LI Wei,LUO Chengming,et al.Experimental study on combinative positioning system for shearer[J].Chinese Journal of Sensors and Actuators,2015,28(2):260-264.
[21] 罗成名.链式传感网中煤矿井下移动装备位姿感知理论及技术研究[D].徐州:中国矿业大学,2014.
[22] 葛世荣,苏忠水,李昂,等.基于地理信息系统(GIS)的采煤机定位定姿技术研究[J].煤炭学报,2015,40(11):2503-2508.
GE Shirong,SU Zhongshui,LI Ang,et al.Study on the positioning and orientation of a shearer based on geographic information system[J].Journal of China Coal Society,2015,40(11):2503-2508.
[23] 李昂,郝尚清,王世博,等.基于SINS/轴编码器组合的采煤机定位方法与试验研究[J].煤炭科学技术,2016,44(4):95-100.
LI Ang,HAO Shangqing,WANG Shibo,et al.Experimental study on shearer positioning method based on SINS and encoder[J].Coal Science and Technology,2016,44(4):95-100.
XIA Ting, LI Wei, WANG Chao, LI Yuchen
(School of Mechatronic Engineering, China University of Mining and Technology, Xuzhou 221116, China)
中图分类号:TD421.6
文献标志码:A 网络出版时间:2017-09-27 14:31
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20170927.1431.008.html
文章编号:1671-251X(2017)10-0024-05
DOI:10.13272/j.issn.1671-251x.2017.10.008
收稿日期:2017-06-01;
修回日期:2017-08-18;责任编辑盛男。
基金项目:国家自然科学基金联合基金资助项目(U1610111);江苏高校优势学科建设工程资助项目(PAPD)。
作者简介:夏婷(1993-),女,江苏徐州人,硕士研究生,主要研究方向为机电控制,E-mail:1003763791@qq.com。
引用格式:夏婷,李威,王超,等.综采工作面采煤机定位技术研究现状及展望[J].工矿自动化,2017,43(10):24-28. XIA Ting,LI Wei,WANG Chao,et al.Research status and prospect of shearer positioning technology on fully mechanized coal mining face[J].Industry and Mine Automation,2017,43(10):24-28.