刘庆国, 曹鹏
(中煤科工集团上海研究院, 上海 200030)
摘要:为了提高采煤机滚筒高度调整的精确性,给出了采煤机滚筒静态调高模型,分析了液压调高系统的响应时间与记忆程控策略的关系,提出了考虑液压系统响应时间的改进型记忆程控策略。该策略将滚筒高度变化简化为线性变化,可在一定程度上避免滚筒调高过程中出现截割顶板的现象,提高了截割的安全性,且具有算法简单、调高精度高等优点。
关键词:煤炭开采; 滚筒调高; 记忆程控策略; 响应时间; 调高精度
随着现代煤矿向高产高效的方向发展及大功率综采技术的提高,大功率电牵引采煤机的研究设计也趋向于自动化、智能化[1-3]。采煤机自动调高技术的关键问题之一在于截割过程中对煤岩体分界的识别,但目前还没有一种稳定、可靠的煤岩体分界识别传感器。滚筒间接检测调高技术避开了煤岩体识别,近年来得到了越来越多的重视和发展,如滚筒调高记忆程控法已在实际生产中得到了一定应用[4-7]。
在高速电牵引采煤机牵引截割过程中,当水平牵引速度较快时,液压系统的响应时间会对滚筒水平位移和竖直位移产生一定的影响,尤其当采样区间较小且采样区间两端点煤层落差较小时,这种影响更加显著[8]。常规型记忆程控策略没有考虑液压调高系统响应时间,为了提高螺旋滚筒高度调整的精确性,本文提出了考虑液压系统响应时间的改进型记忆程控策略。
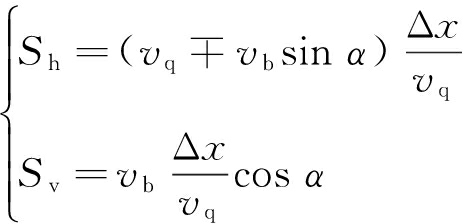
采煤机螺旋滚筒调高系统简图如图1所示。将滚筒调高量分解为水平位移Sh和垂直位移Sv:
(1)
式中:vq为采煤机牵引速度;vb为滚筒摆动速度;t为采煤机行走时间;α为大摇臂与水平方向夹角。
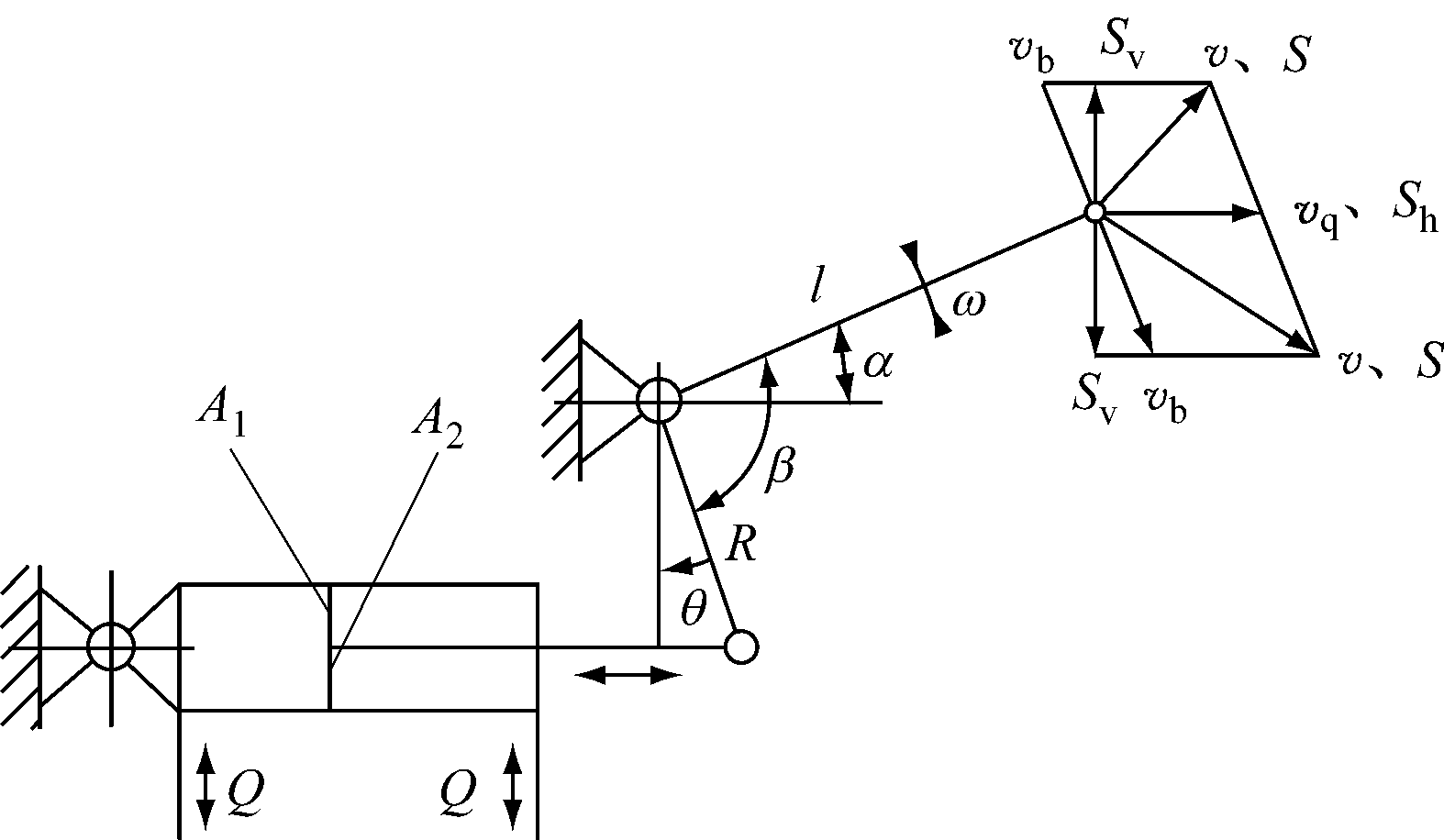
图1 采煤机螺旋滚筒调高系统简图
若采煤机在一个采样间隔Δx内行走速度恒定,则有
(2)
结合式(1)和式(2)可得
(3)
假设螺旋滚筒位移调整在一定范围内为直线调整,即斜率![]() 为常数,则滚筒在相应采样区间内的静态调整模型为
为常数,则滚筒在相应采样区间内的静态调整模型为
(4)
式中ΔHi和Δx(t)分别为时间t内滚筒调高量在竖直方向和水平方向的分量。
当Δx(t)=0时,ΔHi=0;当Δx(t)=Δx时,理想情况下ΔHi=ΔH,ΔH为采样间隔两端点实际位置高度差。若实际煤层顶板在两采样点间滚筒位置呈线性变化,则滚筒高度位置采样线性方程为
(5)
![]() i由采样间隔顶板的变化差决定。式(4)为上一截割循环的采样规律,它可以作为下一个截割循环的控制参照规律,式(4)和式(5)决定了控制策略的制定[9]。但实际情况下由于采煤机行走速度vq的不确定性,即vq在2个截割循环的同一对应采样区间内不同,可能导致采煤机滚筒高度变化曲线的斜率出现以下3种情况
i由采样间隔顶板的变化差决定。式(4)为上一截割循环的采样规律,它可以作为下一个截割循环的控制参照规律,式(4)和式(5)决定了控制策略的制定[9]。但实际情况下由于采煤机行走速度vq的不确定性,即vq在2个截割循环的同一对应采样区间内不同,可能导致采煤机滚筒高度变化曲线的斜率出现以下3种情况![]() ;
;![]() 。
。
2.1 常规型记忆程控策略
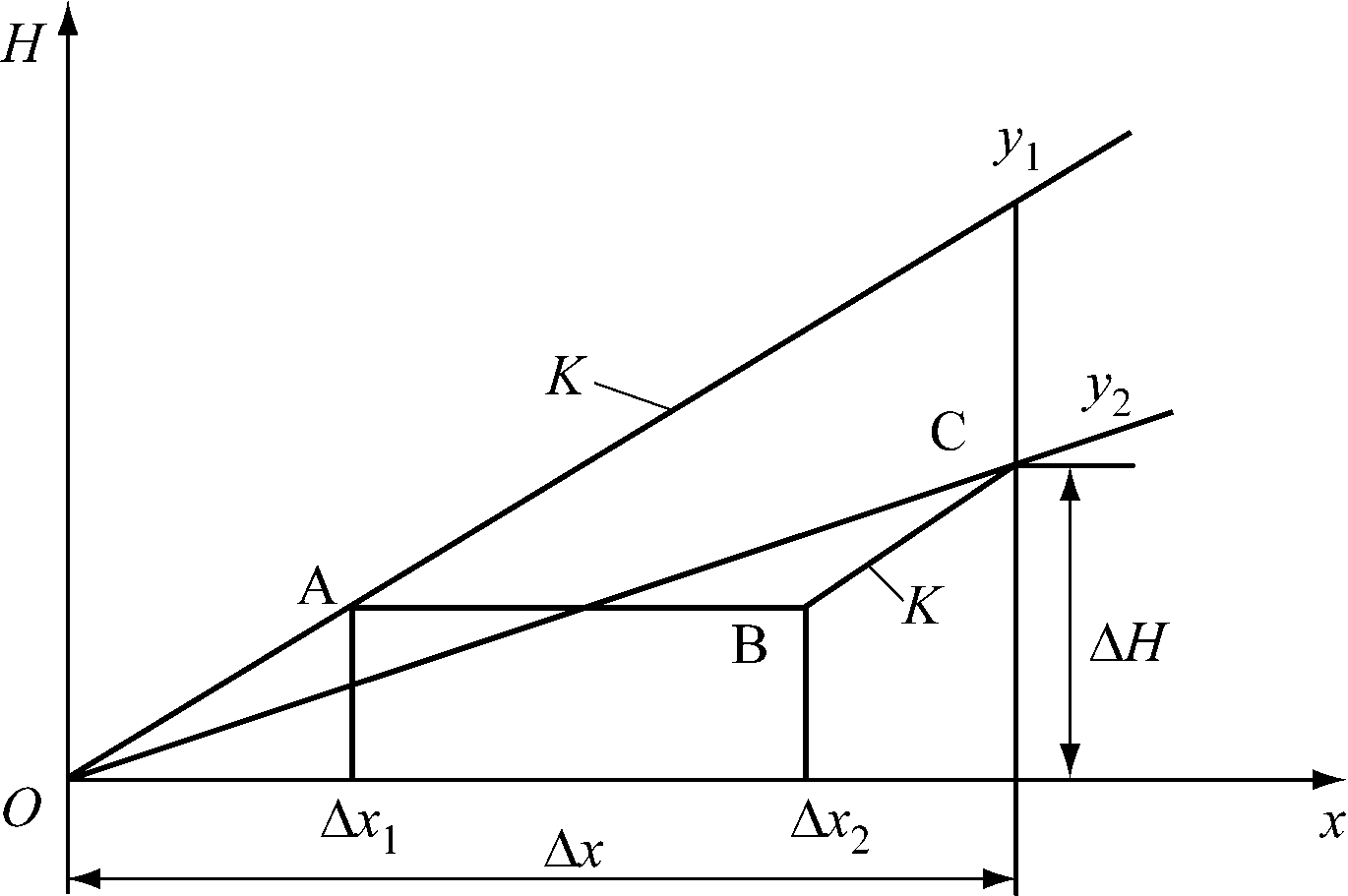
(1) 当![]() 时,控制策略如图2所示,其中H为滚筒垂直位移,x为滚筒水平位移。曲线y1为在本次截割循环中采煤机滚筒的实际截割曲线,曲线y2为上一次记忆截割的煤层厚度变化曲线。为了简化调控策略,令
时,控制策略如图2所示,其中H为滚筒垂直位移,x为滚筒水平位移。曲线y1为在本次截割循环中采煤机滚筒的实际截割曲线,曲线y2为上一次记忆截割的煤层厚度变化曲线。为了简化调控策略,令
(6)
式中Δx1,Δx2分别为采煤机第1次、第2次调高结束时滚筒的水平位移。
图![]() 时的常规型控制策略
时的常规型控制策略
为了使采煤机滚筒运动轨迹在一个采样区间内与前一次滚筒截割轨迹误差更小,即使螺旋滚筒实际截割的折曲线和上次采样记忆的折曲线误差更小,由图2可知,也就是要使折线ABC逼近曲线y2,在此采用最小二乘法进行拟合,即
F(Δx1)=![]()
![]()
(7)
令![]() ,可得
,可得
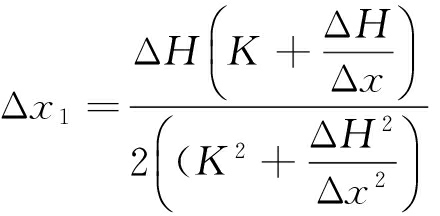
(8)
(2) 当![]() 时(此时ΔH=ΔH1),控制策略如图3所示。当
时(此时ΔH=ΔH1),控制策略如图3所示。当![]() 时,在一个采样区间内滚筒调高竖直位移无法达到预期的煤层高度变化,因此,需要将几个采样区间合在一起制定调控策略;出现这种情况是因为采煤机在上次循环截割中前一个采样区间内行走速度较慢,而在后一个采样区间内行走速度较快。
时,在一个采样区间内滚筒调高竖直位移无法达到预期的煤层高度变化,因此,需要将几个采样区间合在一起制定调控策略;出现这种情况是因为采煤机在上次循环截割中前一个采样区间内行走速度较慢,而在后一个采样区间内行走速度较快。
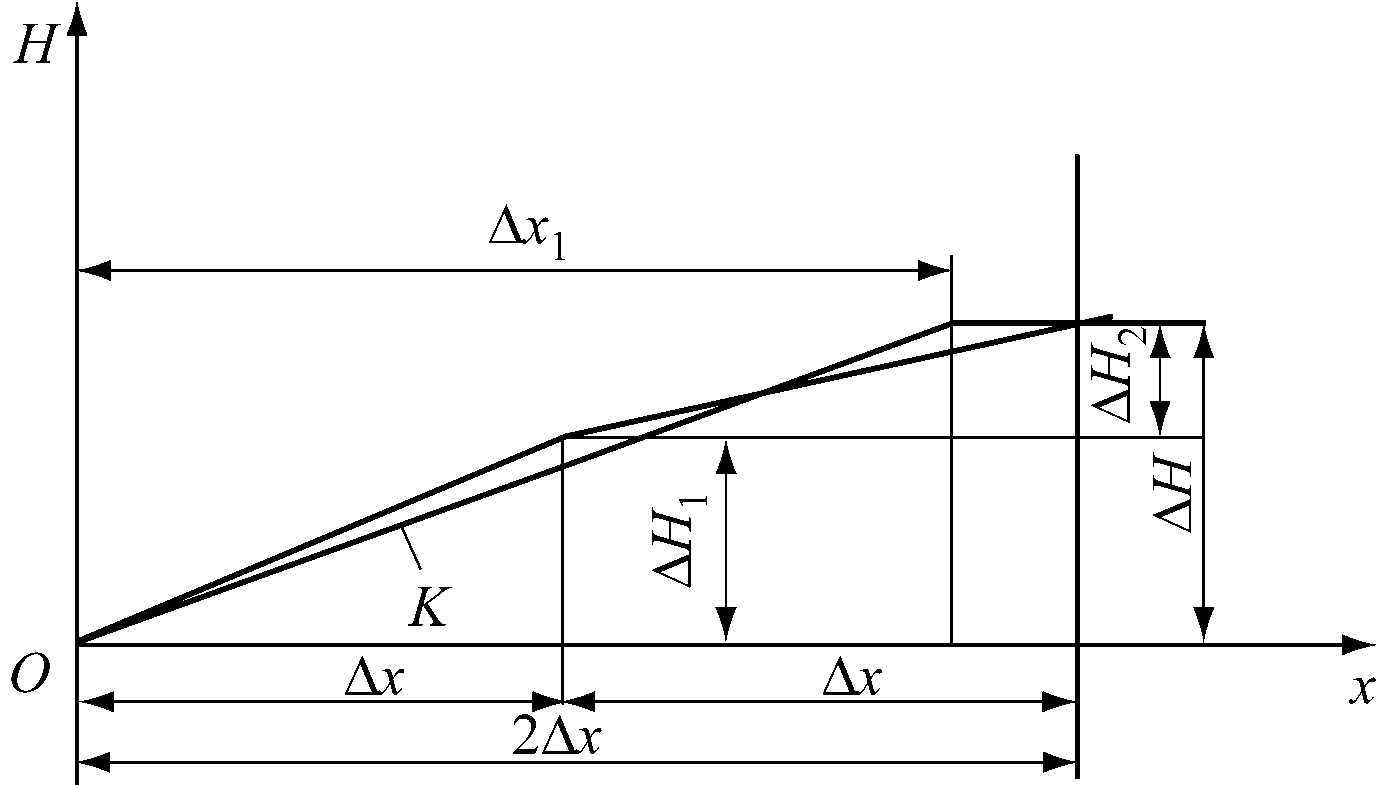
图![]() 时的常规型控制策略
时的常规型控制策略
图3中,ΔH1为前一个采样区间记忆的煤层厚度变化,ΔH2为后一个采样区间记忆的煤层厚度变化,Δx1为采煤机在2个采样区间内调高结束时滚筒水平运动位移,要使采煤机在一次调高过程中达到预定的煤层高度变化,需满足式(9):
(9)
整理式(9)可得
(10)
(3) 当![]() 时,控制策略如图4所示,其中
时,控制策略如图4所示,其中![]() 。当
。当![]() 时,调控滚筒截割曲线与上次采样记忆的折曲线基本吻合。在一个采样区间内,要使采煤机滚筒竖直位移等于预期位移,只需在整个采样区间内进行连续调高即可。
时,调控滚筒截割曲线与上次采样记忆的折曲线基本吻合。在一个采样区间内,要使采煤机滚筒竖直位移等于预期位移,只需在整个采样区间内进行连续调高即可。
图![]() 时的常规型控制策略
时的常规型控制策略
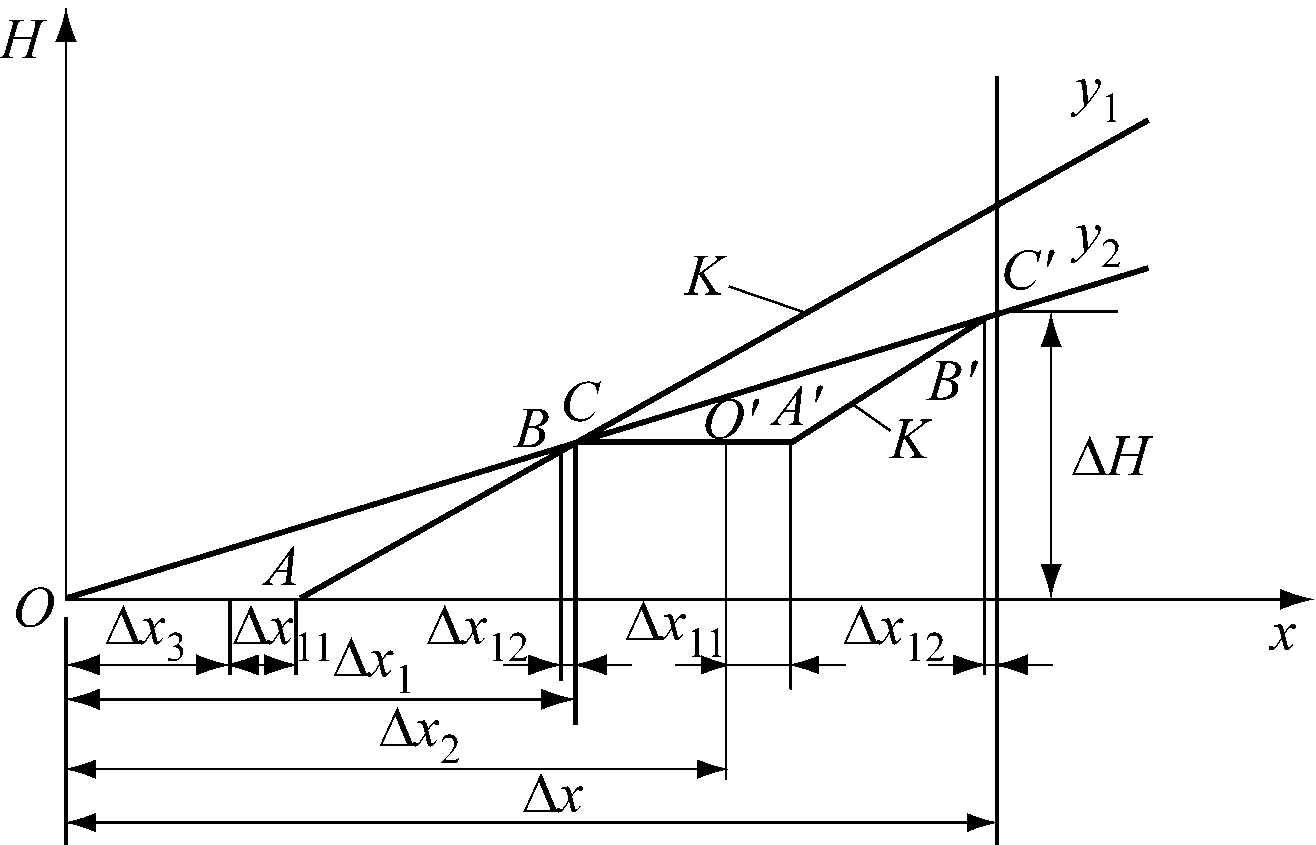
2.2 改进型记忆程控策略
(1) 当![]() 时,控制策略如图5所示,其中曲线y1为采煤机在本次循环中的实际截割曲线,其斜率为K,曲线y2为上一次记忆的煤层厚度变化曲线。图中参量含义如下:Δx3为采煤机在第一次调高开始时滚筒的水平位移;Δx11为液压系统开启响应时间内滚筒的水平位移;Δx12为液压系统关闭响应时间内滚筒的水平位移。
时,控制策略如图5所示,其中曲线y1为采煤机在本次循环中的实际截割曲线,其斜率为K,曲线y2为上一次记忆的煤层厚度变化曲线。图中参量含义如下:Δx3为采煤机在第一次调高开始时滚筒的水平位移;Δx11为液压系统开启响应时间内滚筒的水平位移;Δx12为液压系统关闭响应时间内滚筒的水平位移。
图![]() 时的改进型控制策略
时的改进型控制策略
为了使采煤机滚筒运动轨迹在一个采样区间内与前一次滚筒截割轨迹误差更小,即使螺旋滚筒实际截割的折曲线和上次采样记忆的折曲线误差更小,由图5可知,也就是要使折线ACA′C′逼近曲线y2,在此采用最小二乘法进行拟合,即
F(Δx1)=
(11)
令![]() =0,可得
=0,可得
(12)
(13)
(14)
(2) 当![]() 时(此时ΔH=ΔH1),控制策略如图6所示。当
时(此时ΔH=ΔH1),控制策略如图6所示。当![]() 时,出现与常规控制策略相同的情况,即在一个采样区间内滚筒调高竖直位移无法达到预期的煤层高度变化,因此,需要将几个采样区间合在一起分析调控策略,本文将2个采样区间合在一起进行分析。
时,出现与常规控制策略相同的情况,即在一个采样区间内滚筒调高竖直位移无法达到预期的煤层高度变化,因此,需要将几个采样区间合在一起分析调控策略,本文将2个采样区间合在一起进行分析。
图![]() 时的改进型控制策略
时的改进型控制策略
要使采煤机在2次调高过程中达到预定的煤层高度变化,需满足式(15):
(15)
整理式(15)可得
(16)
Δx2=
![]()
(17)
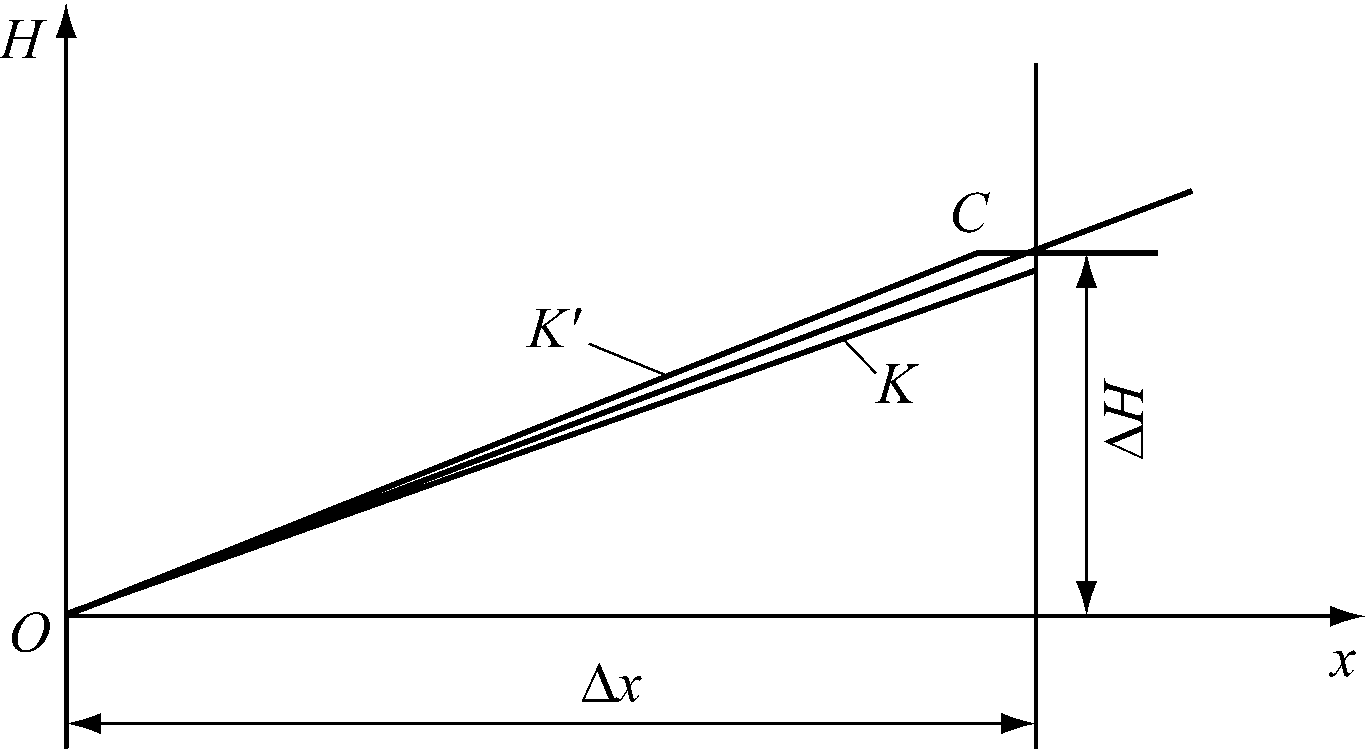
(3) 当![]() 时,控制策略如图7所示。当
时,控制策略如图7所示。当![]() 时,调控滚筒截割曲线与上次采样记忆的折曲线基本吻合,但考虑到液压系统响应时间的影响,为了提高滚筒调高精度,电磁阀不应像常规控制策略那样在采样区间的端点处关闭,而要在到达采样区间端点前就关闭,借助液压系统关闭响应时间使滚筒继续上升到预期高度或预期高度范围内。图7中,K和K′分别代表2种近似于
时,调控滚筒截割曲线与上次采样记忆的折曲线基本吻合,但考虑到液压系统响应时间的影响,为了提高滚筒调高精度,电磁阀不应像常规控制策略那样在采样区间的端点处关闭,而要在到达采样区间端点前就关闭,借助液压系统关闭响应时间使滚筒继续上升到预期高度或预期高度范围内。图7中,K和K′分别代表2种近似于![]() 的斜率,其中对应于斜率K的采煤机水平牵引速度略大于对应于斜率为K′的采煤机水平牵引速度,Δx11和
的斜率,其中对应于斜率K的采煤机水平牵引速度略大于对应于斜率为K′的采煤机水平牵引速度,Δx11和![]() 均表示液压系统开启响应时间内滚筒水平位移,Δx12和
均表示液压系统开启响应时间内滚筒水平位移,Δx12和![]() 均表示液压系统关闭响应时间内滚筒水平位移。
均表示液压系统关闭响应时间内滚筒水平位移。
图![]() 时的改进型控制策略
时的改进型控制策略
若采煤机滚筒调高误差为±ΔP,则由图7可知,要使误差不超出控制范围,K应该满足式(18):
(18)
改进型记忆程控策略考虑了液压调高系统的响应时间,可提高滚筒调高的精度。在改进型控制策略下,滚筒调高的运动轨迹在![]() 和
和![]() 时均处于2个采样点煤层厚度变化线的下方,在一定程度上可避免滚筒调高过程中出现截割顶板的现象,提高了截割的安全性。该改进型记忆程控策略将滚筒高度变化简化为线性变化,具有算法简单、调高精度高等优点,为自动化调高中记忆截割调高程控策略的制定提供了一定的参照。
时均处于2个采样点煤层厚度变化线的下方,在一定程度上可避免滚筒调高过程中出现截割顶板的现象,提高了截割的安全性。该改进型记忆程控策略将滚筒高度变化简化为线性变化,具有算法简单、调高精度高等优点,为自动化调高中记忆截割调高程控策略的制定提供了一定的参照。
参考文献:
[1] 马洪礼,司凯文,吕东跃.无人工作面智能化采煤机监控系统的研发[J].煤炭科学技术,2014,42(9):67-71.
[2] 龙钢.我国大功率采煤机的技术现状及发展方向[J].矿山机械,2009,37(24):14-17.
[3] HU S Y. Present situation and developing trend of coal mine automation and communication technology[J]. Journal of Coal Science and Engineering (China), 2008, 14(3): 489-491.
[4] 刘春生,侯清泉.采煤机滚筒自动调高记忆程控再现模式[J].煤矿机电,2004(5):22-24.
[5] 夏新君.采煤机滚筒自动调高技术的分析[J].机械与装备,2013(5):273.
[6] 朱志英.基于模糊PID算法的采煤机记忆截割路径自适应研究[J].中国煤炭,2015,41(10):79-82.
[7] 李春华,刘春生.采煤机滚筒自动调高技术的分析[J].工矿自动化,2005,31(4):48-51.
[8] 刘春生,荆凯,杨秋.采煤机滚筒调高截割记忆程控的控制策略[J].辽宁工程技术大学学报(自然科学版),2007,26(5):751-753.
[9] 荆凯.采煤机记忆程控模型分析及控制策略的研究[D].哈尔滨:黑龙江科技学院,2007.
LIU Qingguo, CAO Peng
(CCTEG Shanghai Research Institute, Shanghai 200030, China)
Abstract:In order to improve accuracy of height adjustment of shearer roller, static height adjustment model of shearer roller was given, relationship between response time of hydraulic height adjustment system and memory program control strategy was analyzed, and improved memory program control strategy which considered response time of hydraulic system was proposed. The improved strategy simplifies roller height variation to linear variation, can avoid phenomenon of cutting roof during process of roller height adjustment. It improves cutting safety, and has advantages of simple algorithm and high adjustment precision.
Key words:coal mining; roller height adjustment; memory program control strategy; response time; adjustment precision
文章编号:1671-251X(2017)01-0034-04
DOI:10.13272/j.issn.1671-251x.2017.01.009
收稿日期:2016-07-19;
修回日期:2016-12-03;责任编辑:胡娴。
基金项目:国家高技术研究发展计划(863计划)项目(2012AA06A406)。
作者简介:刘庆国(1989-),男,黑龙江哈尔滨人,助理工程师,主要从事采煤机械及液压系统设计工作,E-mail:347274096@qq.com。通信作者:曹鹏(1990-),男,河南驻马店人,助理工程师,硕士,主要从事采煤机械设计工作,E-mail:caopeng2013@126.com。
中图分类号:TD632
文献标志码:A
网络出版:时间:2016-12-30 09:46
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20161230.0946.009.html
刘庆国,曹鹏.改进型采煤机滚筒调高记忆程控策略[J].工矿自动化,2017,43(1):34-37.