图1 旋流器给矿浓度控制结构
张燕1,2, 张佳1, 代亚菲1
(1.河北工业大学 控制科学与工程学院, 天津 300130; 2.河北省控制工程技术研究中心, 天津 300130)
摘要:以磨矿过程基础回路重要工艺参数——旋流器给矿浓度控制为研究对象,针对无模型自适应控制(MFAC)的参数自适应性差的问题,引入模糊控制,提出了模糊MFAC方法,给出了该方法的理论推导步骤,设计了模糊MFAC控制器。将模糊MFAC方法、基本MFAC方法和PID方法进行对比仿真实验,结果表明,模糊MFAC方法能够快速跟踪期望值,具有更小的超调量和跟踪误差,且抗干扰能力强。
关键词:磨矿过程; 基础回路; 无模型自适应控制; 模糊控制
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160429.1133.017.html
磨矿作业的目的是将大颗粒矿石磨碎到一定粒度,使各种有用矿物与脉石矿物分离,呈现单体解离状态,以利于有用矿物的选别,所以,磨矿产品的粒度对后续作业的生产指标乃至整个选矿厂的经济技术指标有很大的影响[1-3]。磨矿过程基础回路控制是磨矿过程的重要环节,其控制效果直接影响最终产品粒度指标。然而磨矿过程机理复杂、影响因素多,具有大时滞、非线性、多变量等特点,很难建立精确的模型,而且采用基于模型的方法,不仅使系统控制算法更加复杂,还很难保证系统原有的可靠性。
无模型自适应控制(Model-Free Adaptive Control,MFAC)[4]仅依赖于被控系统实时测量的I/O数据,不依赖于任何被控系统数学模型信息,能够实现未知被控系统的参数和结构自适应控制。MFAC方法简单实用、可调参数少且易于实现,能够很好地处理未知非线性时变系统的控制问题[5]。目前,MFAC方法已经在球磨机负荷控制[6]、直流电动机[7]、精馏过程[8]中得到了成功应用。然而,目前大多数MFAC的参数不能根据被控对象的特性自适应改变,并且控制器输出对于前一时刻的输入变化量过于敏感,会使系统失去稳定性。本文在基本MFAC的基础上引入模糊控制,提出了模糊MFAC方法,对磨矿过程基础回路中重要工艺参数旋流器给矿浓度控制过程进行仿真实验,结果验证了模糊MFAC方法的有效性。
磨矿过程基础回路控制主要实现重要工艺参数的连续稳定控制,并将其控制在工艺要求范围内。然而基础回路控制系统中,重要工艺参数之间存在着强耦合,即改变磨矿入口的给矿量与给水量的比例时会影响分级机和旋流器的溢流浓度,而旋流器给矿浓度的大小也将影响磨矿入口的给矿量与给水量,同时旋流器给矿浓度过程存在惯性和时滞特性,所以控制器必须保证控制过程的快速性、稳定性和较强的鲁棒性。
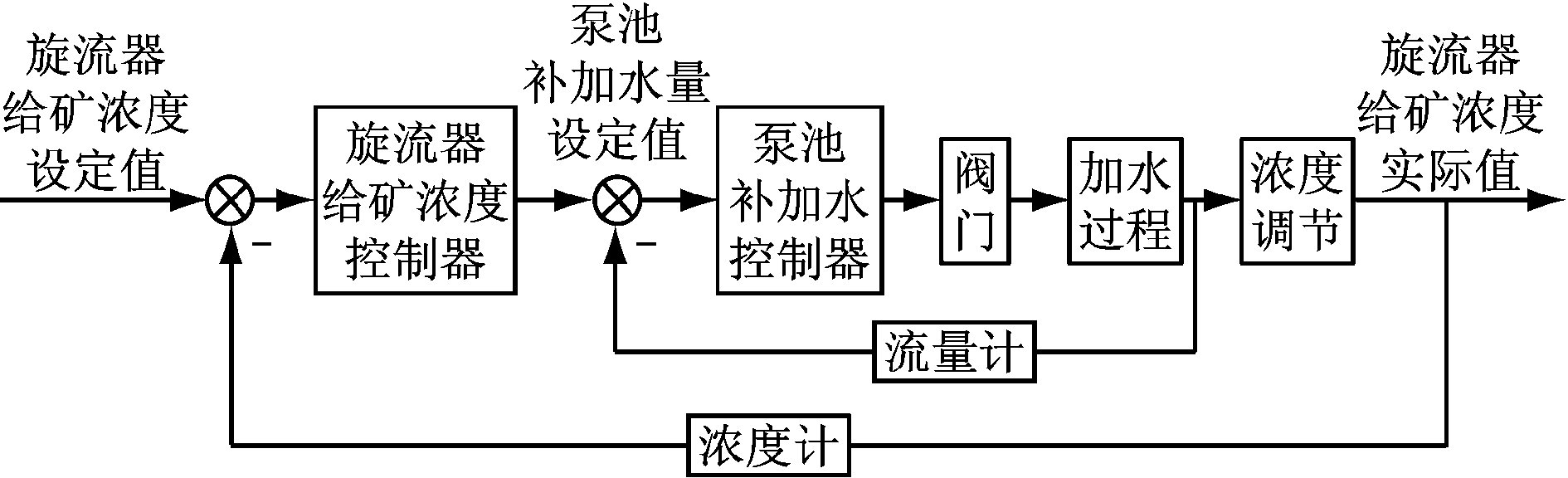
本文主要考虑磨矿过程基础回路重要工艺参数——旋流器给矿浓度的控制过程,即通过调节泵池补加水量来实现旋流器给矿浓度的闭环控制,因此以旋流器给矿浓度控制为主回路,泵池补加水量控制为副回路,设计旋流器给矿浓度的串级控制结构,如图1所示。
图1 旋流器给矿浓度控制结构
根据泵池补加水量与旋流器给矿浓度的关系,通过曲线拟合可得控制系统传递函数为[9]
(1)
式中s为拉普拉斯算子。
本文中采样周期T=20 s,将控制系统模型离散化可得
0.064 7u(k-7)-0.009u(k-8)
(2)
式中u(k),y(k)分别为系统在k时刻的输入和输出。
2.1 非线性系统动态线性化
一般SISO离散时间非线性系统可表示为[10]
(3)
式中:nu,ny分别为系统的输入阶数、输出阶数(未知的正整数);f(·)为未知的非线性函数。
假设1:系统的输入、输出是可控制和可观测的,即对某一系统来说,如果期望的输出信号y*(k+1)有界,则一定存在一有界的可控输入信号,使得系统在该可控输入信号驱动下的输出等于系统的期望输出。
假设2:非线性函数f(·)关于系统的控制输入信号u(k)的偏导数是连续的。
假设3:系统满足广义Lipschitz(利普希茨)条件,即对任意的k和Δu(k)≠0,有
(4)
式中:Δy(k+1)=y(k+1)-y(k);Δu(k)=u(k)-u(k-1);b为一个正常数。
从实际角度来看,上述对控制对象的假设是合理且可接受的。假设1是控制系统设计中对一般非线性系统的一种典型约束条件;假设2是对系统输出变化率上界的一种限制。从能量角度来看,有界的输入能量变化应产生系统内有界的输出能量变化。
定理1:对于满足上述3个假设的非线性系统,当Δu(k)≠0时,一定存在一个伪偏导数φ(k),使得Δy(k+1)=φ(k)Δu(k),且![]() 。
。
由定理1可知,系统的动态线性化模型为
(5)
2.2 算法设计
2.2.1 控制律算法
为了避免过大的控制输入使得控制系统本身遭到破坏和保证系统的稳态跟踪误差,考虑如下控制输入准则函数:
(6)
式中λ为权重因子,λ>0。
将式(5)代入式(6)中,对u(k)求导并令其等于零,可得如下控制律算法:
(7)
式中ρ为步长因子,ρ∈(0,1]。
式(7)中λ限制了控制输入的变化Δu(k),用来确保控制输入信号具有一定的平滑性。
2.2.2 伪偏导数估计算法
由定理1可知,满足上述3个假设的非线性系统可由伪偏导数φ(k)的动态线性化模型表示,根据控制输入准则函数的极小化,可得到控制律算法,为了实现控制律算法,则需要精确的、已知的伪偏导数的值。但由于系统的数学模型很难获取,且伪偏导数是时变参数,所以需要利用系统的I/O数据来估计伪偏导数。传统的参数估计准则函数是将系统模型的输出与真实输出之差的平方极小化,然而用此类方法推导参数估计值时,参数估计值会对一些不准确的采样数据过于敏感。因此,采用与求控制律算法类似的参数估计方法,可得伪偏导数估计准则函数为
(8)
式中:μ为惩罚因子,μ>0;![]() 为φ(k)的估计值。
为φ(k)的估计值。
对式(8)关于φ(k)求极值,得到伪偏导数估计算法:
(9)
式中η为学习步长。
若式(9)满足![]() ≤ε或
≤ε或![]() ≤ε或
≤ε或![]() 为充分小的正数;sign(·)为符号函数),则
为充分小的正数;sign(·)为符号函数),则
(10)
式中![]() (1)为
(1)为![]() 的初值。
的初值。
为了使控制系统具有快速响应性能与自适应能力,且输出能光滑地跟踪和收敛到期望值,将模糊控制引入到MFAC控制器的参数优化过程中。模糊控制不用考虑对象的数学模型,根据隶属度函数来确定控制元素与模糊集合之间的隶属关系,并将判断过程用逻辑推理if-then语句的形式表示出来,从而实现对被控对象的有效控制[11]。在对受控过程进行控制时,观测到的误差e和误差变化率ec是一些清晰量,经过模糊化后得到误差和误差变化率大、中、小的模糊量。经过人的模糊决策后,得到决策的控制输出模糊量。当按照一定的模糊决策去执行具体的动作时,所执行的动作又必须以清晰量表现出来。因此,控制过程可归结为将误差、误差变化率的清晰量经模糊化得到模糊量,将模糊近似推理分析得到的模糊控制量输出,然后经模糊决策判断,得到清晰量的控制输出去执行控制动作。模糊MFAC系统原理如图2所示。
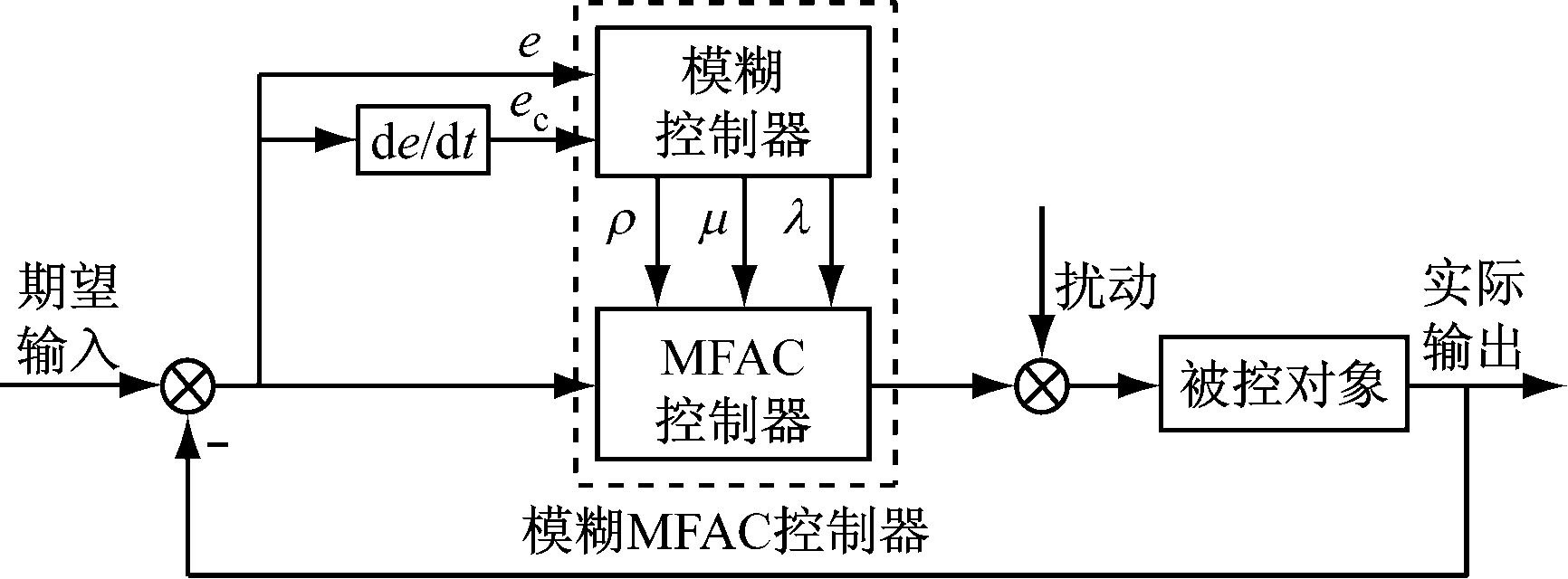
图2 模糊MFAC系统原理
模糊MFAC方法步骤:
Step1:利用观测到的输入输出{u(k),y(k)}以及伪偏导数估计算法(式(9)),可估计出伪偏导数φ(k)的估计值![]() (k);
(k);
Step2:由磨矿过程期望的输出y*(k+1),可得k时刻的误差e(k);
Step3:将误差e(k)及误差变化率ec(k)输入到模糊控制器,结合式(7),可得到k时刻应施加到磨矿过程中的输入值u*(k);
Step4:将u*(k)施加到磨矿过程中,可得到1组新的输入输出数据{u(k+1),y(k+1)};
Step5:在原数据组中添加上述新的数据,再估计下一时刻伪偏导数,重复上述步骤,即可实现整个控制过程。
4.1 模糊MFAC控制器输入输出变量的确定
通过期望输入与实际输出的比较得出误差e及误差变化率ec作为输入变量,e的模糊论域为{-9,9},ec的模糊论域为{-3,3};输出变量为λ,μ,ρ,λ的模糊论域为{0.1,1.6},μ的模糊论域为{0.1,1.6},ρ的模糊论域为{0.01,1}。定义模糊量的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},子集中元素分别代表“负大、负中、负小、零、正小、正中、正大”。考虑到论域的覆盖程度和灵敏度,NB选用Z型隶属度函数,PB选用S型隶属度函数,其他均采用三角形隶属度函数。e与ec的隶属度函数如图3所示。
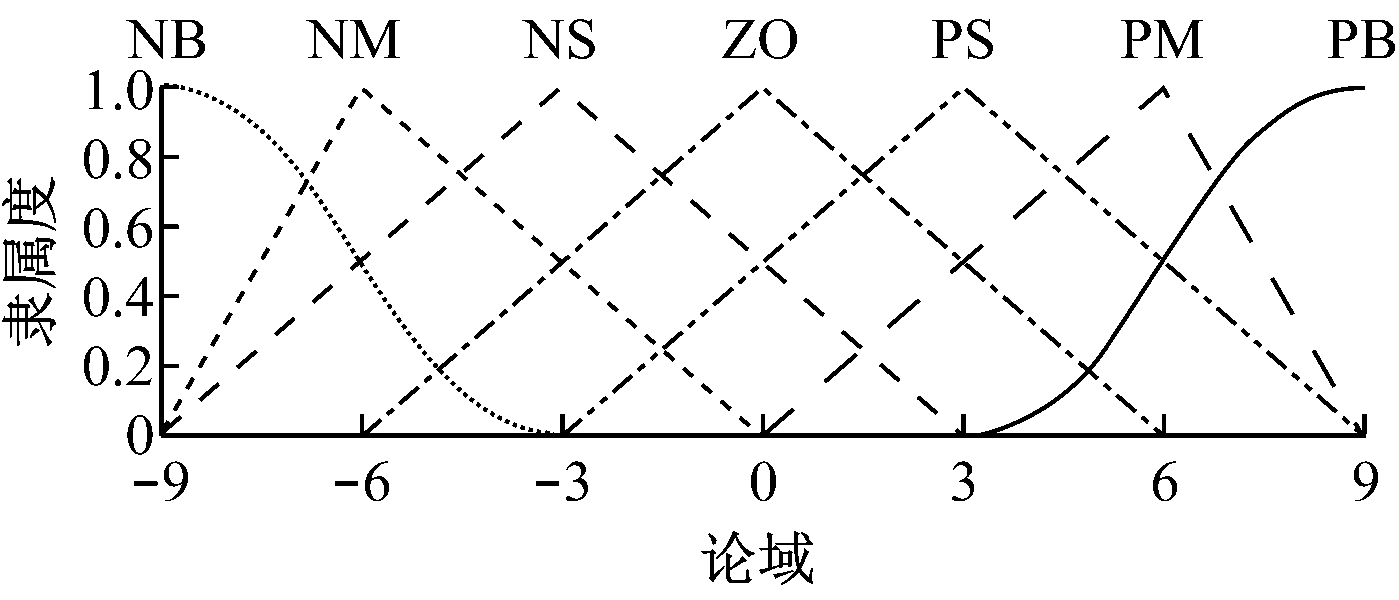
(a) e的隶属度函数
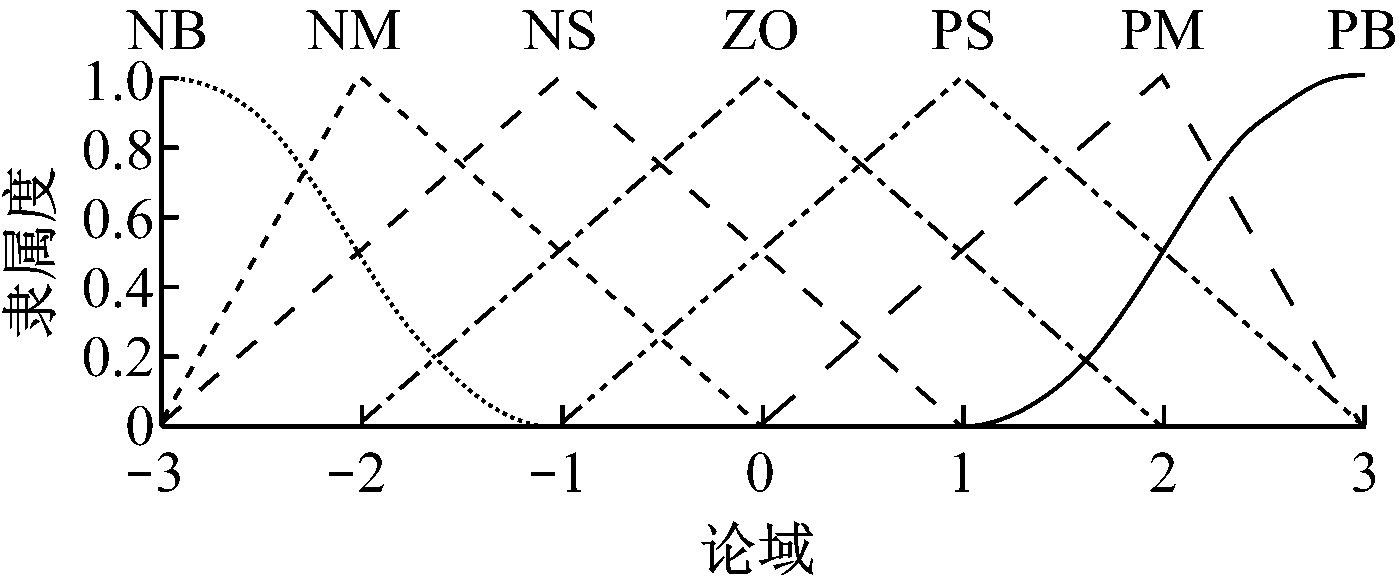
(b) ec的隶属度函数
图3 e与ec的隶属度函数
4.2 模糊MFAC控制器模糊控制规则的设计
模糊控制器以e与ec作为输人量,λ,μ,ρ作为输出量。根据MFAC的特点可知:权重因子λ和惩罚因子μ越小,控制作用越强,系统超调量变大且收敛速度变快;步长因子ρ越小,系统稳定性越好、超调量越小、抗干扰能力越强,但是系统收敛速度变慢。因此,在调节初期,应增大ρ,同时减小λ,μ,以提高系统收敛速度;在调节中期,应适当减小ρ,加大λ,μ,以同时保证系统的稳定性和控制精度;在调节后期,应增大λ,μ,减小偏差,以抑制系统超调。由以上分析可总结出误差e和误差变化率ec与参数λ,μ,ρ之间的定性关系,建立合适的模糊规则,见表1。
表1 模糊MFAC控制器λ,μ,ρ的模糊规则
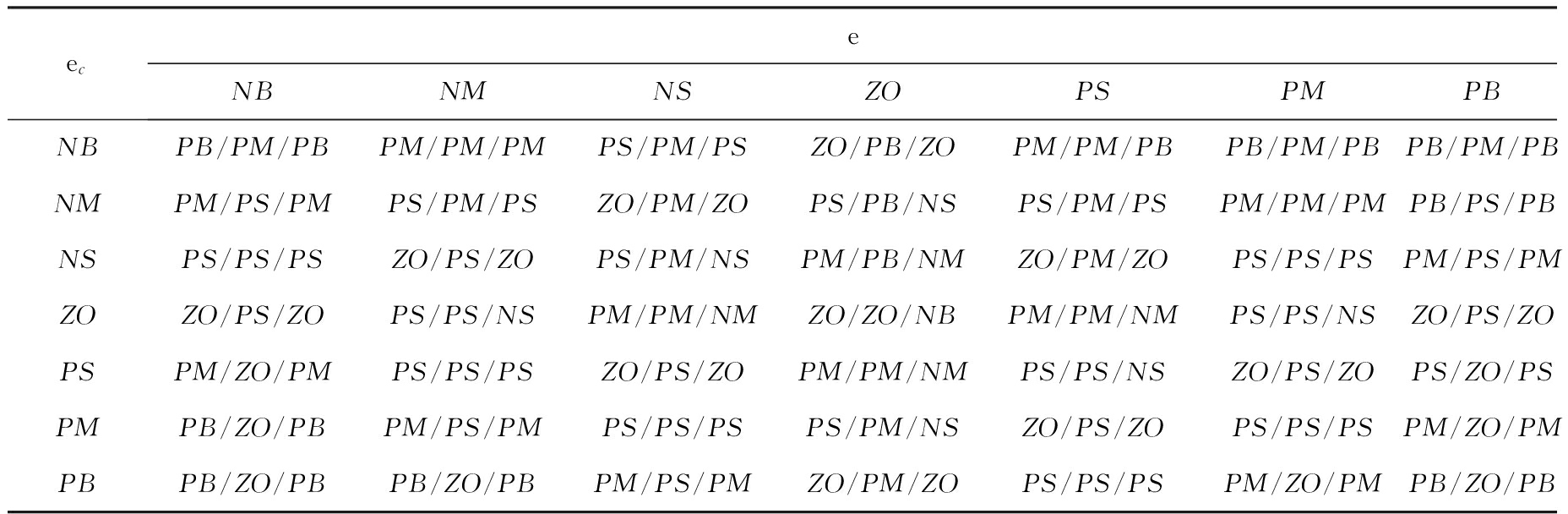
4.3 模糊MFAC控制器输出信息的解模糊化
解模糊化是将模糊量转化成精确量,根据输出模糊子集的隶属度计算输出的确定值。首先得到某一时刻的误差e和误差变化率ec,然后根据它们的隶属度函数曲线得到隶属度,并且根据模糊规则表进行相应的推理计算,得出λ,μ,ρ各语言值对应的隶属度,最后用重心法进行精确化计算,可得到优化后的λ,μ,ρ的确定值。
采用模糊MFAC方法、基本MFAC方法和PID方法对磨矿过程基础回路中旋流器给矿浓度的控制过程进行仿真。模糊MFAC方法中初值的选取:λ=0.5,μ=0.4,ρ=0.1,ε=0.000 01,η=1。基本MFAC方法中初值的选取:λ=0.6,μ=0.05,ρ=0.5,ε=0.000 01,η=1。PID方法中初值的选取:比例系数kp=0.01,微分系数kd=3,积分系数ki=0.007 5。
通过Matlab仿真得到3种控制方法下系统输出响应曲线、误差曲线分别如图4、图5所示。从图4、图5可看出,3种控制方法均能对旋流器给矿浓度的期望值进行快速跟踪;但模糊MFAC方法的超调量最小,即该方法优化的系统的稳定性最好,而PID方法和基本MFAC方法的超调量较大,使系统的稳定性较差;同时模糊MFAC方法的误差最小,具有较高的跟踪精度。
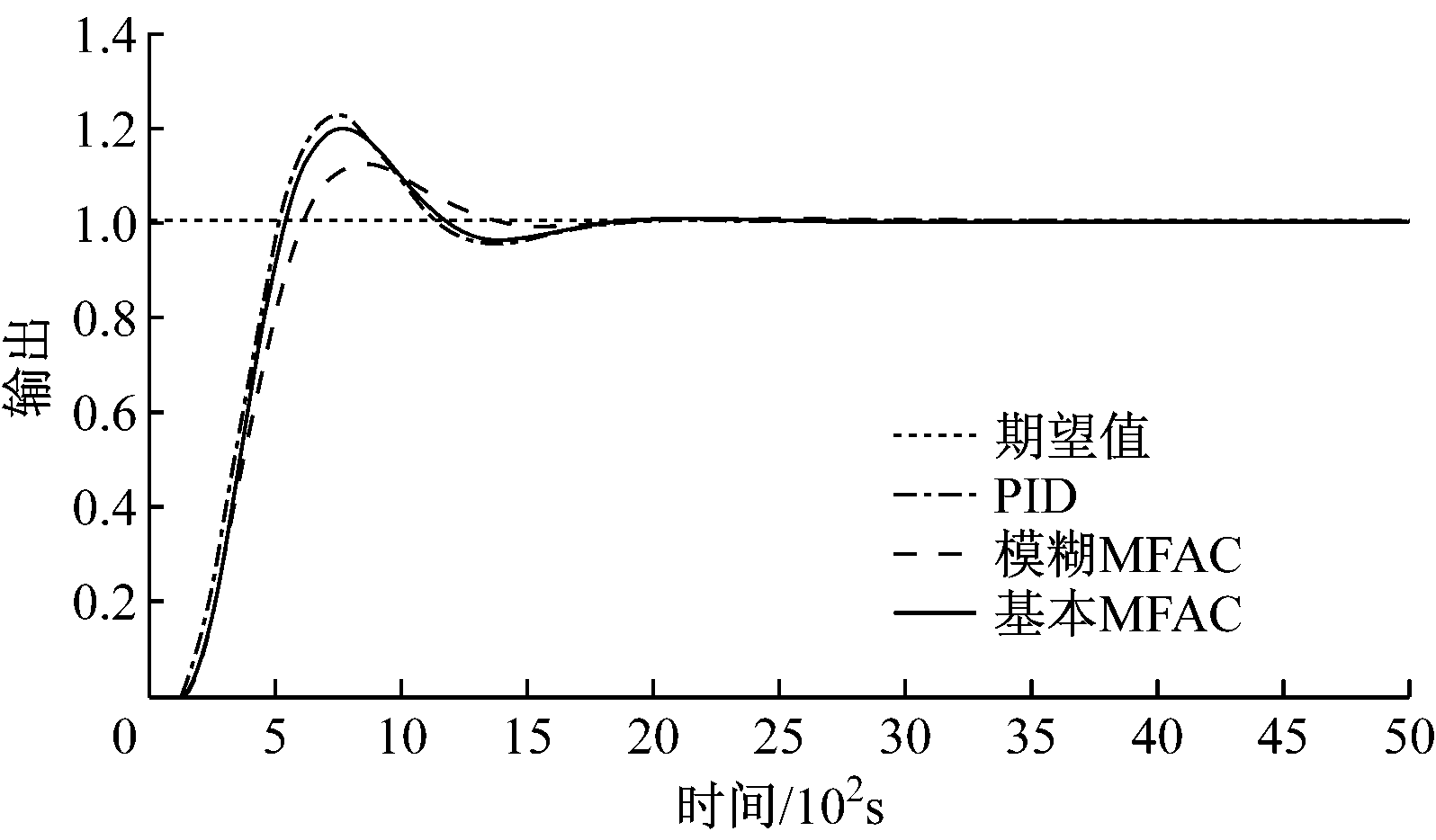
图4 3种控制方法下系统输出响应曲线
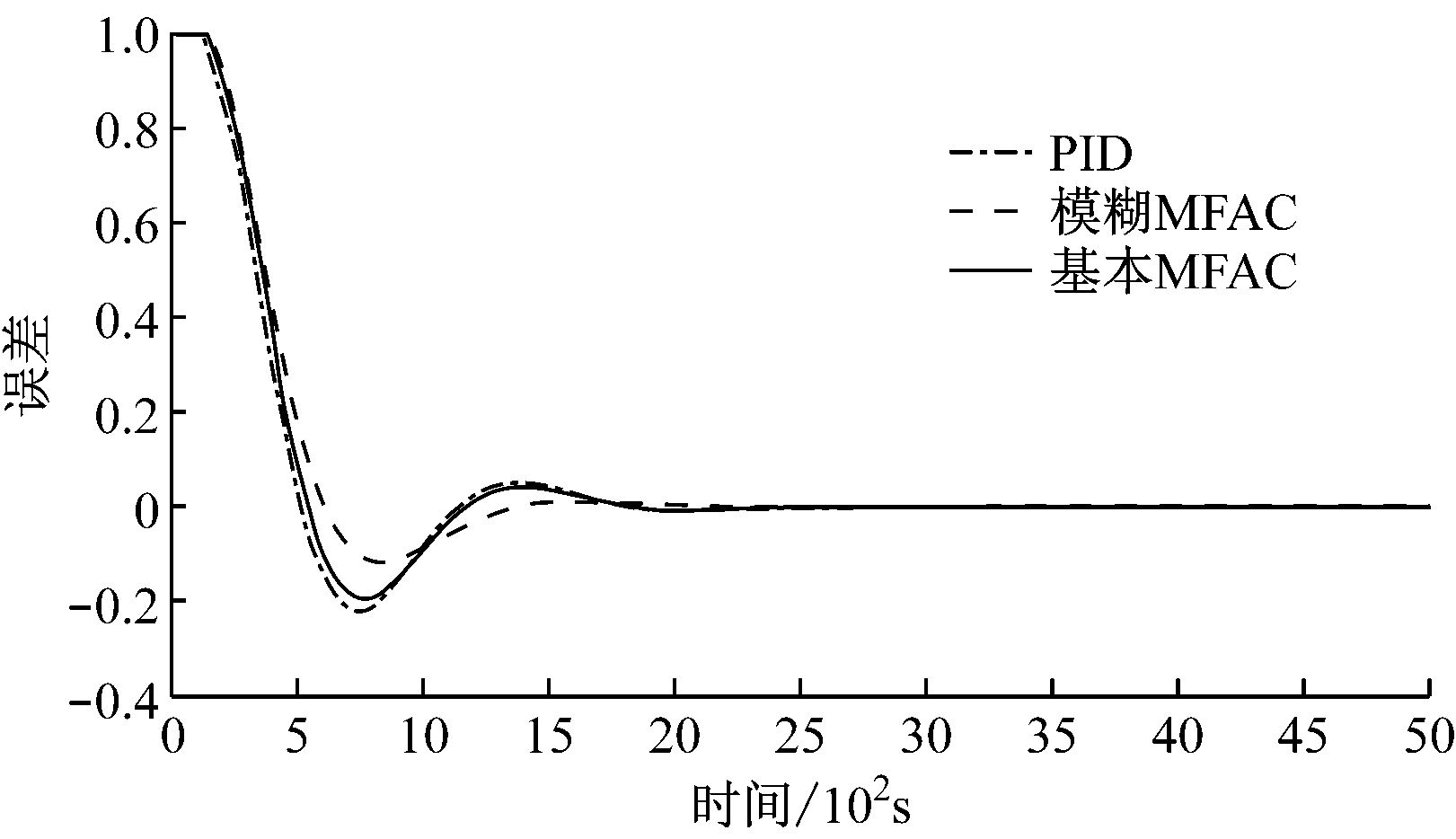
图5 3种控制方法下系统误差曲线
在2 000,4 000 s时加入扰动,系统的输出响应曲线、误差曲线分别如图6、图7所示。加入扰动后,相比于另外2种控制方法,模糊MFAC方法控制下的系统能迅速回到稳定值,误差波动范围小,说明模糊MFAC方法具有更好的适应性和更高的控制精度。
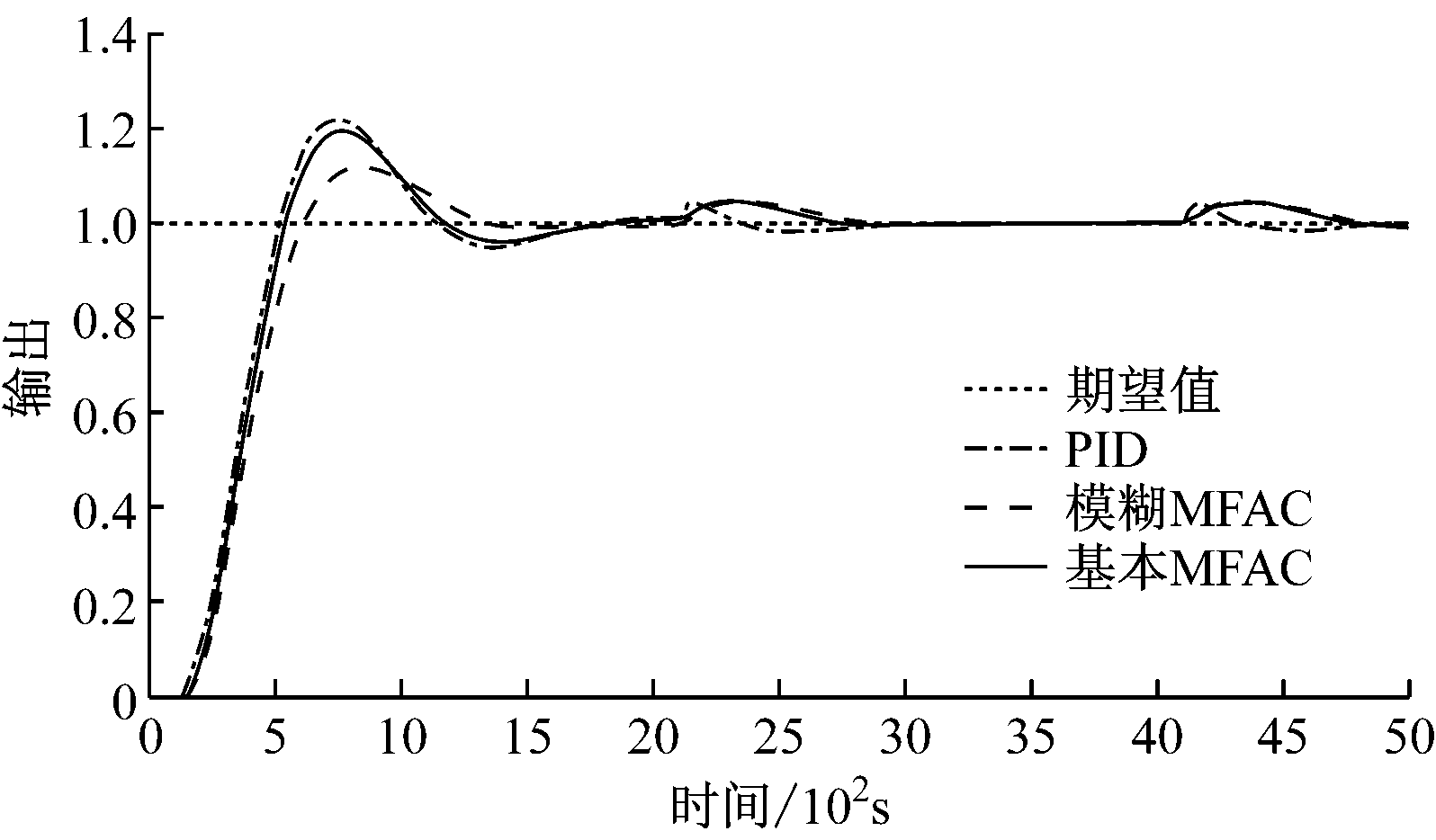
图6 加入干扰后3种控制方法下系统输出响应曲线
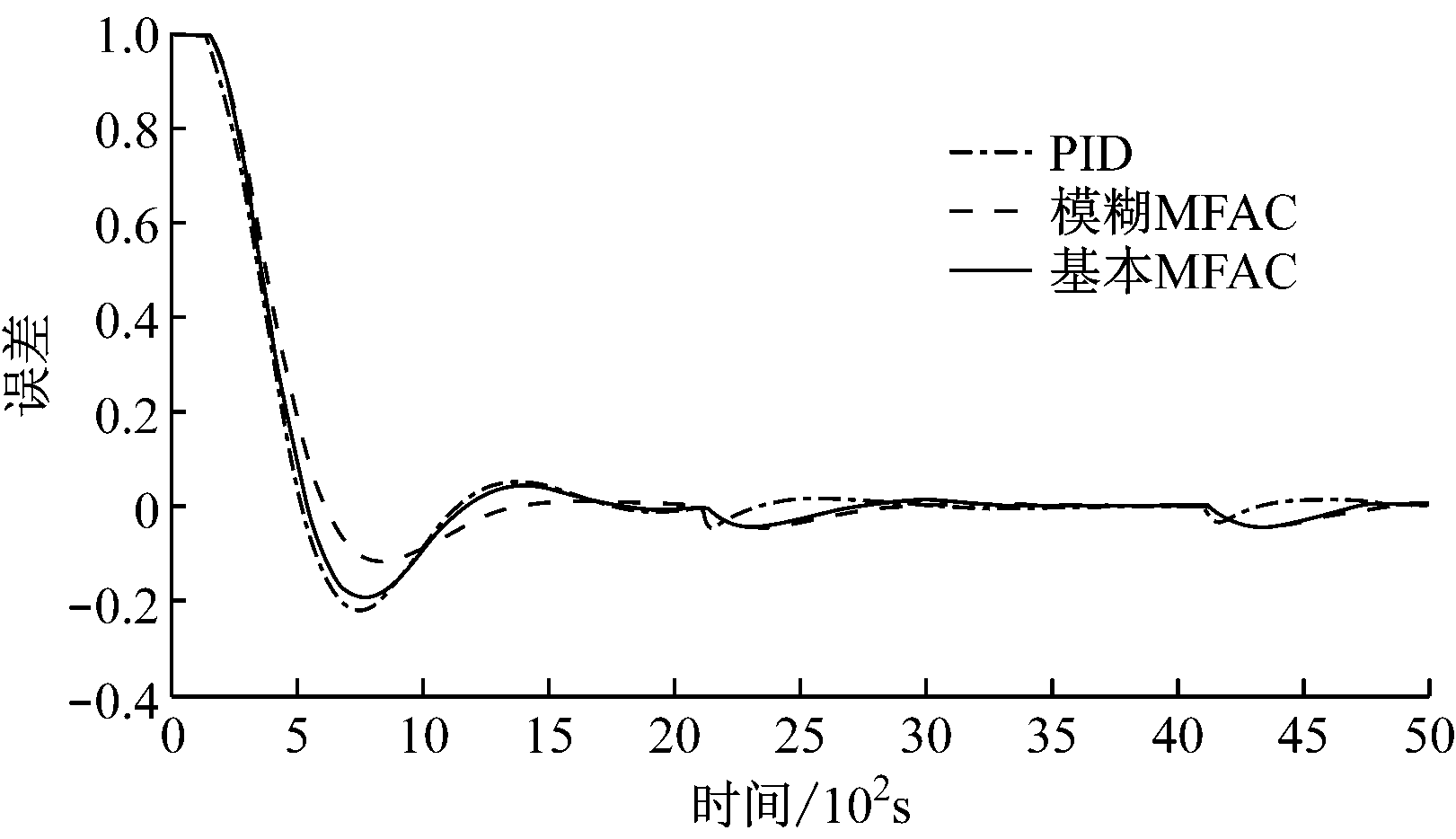
图7 加入干扰后3种控制方法下系统误差曲线
针对磨矿过程基础回路控制的复杂性,提出了基于模糊MFAC的磨矿过程基础回路优化控制方法。给出了基本MFAC方法、PID方法和模糊MFAC方法下对重要工艺参数旋流器给矿浓度的控制仿真,结果表明,模糊MFAC方法能够对期望值进行快速跟踪,相比于基本MFAC方法和PID方法,模糊MFAC方法具有更小的超调量、更高的跟踪精度,且抗干扰能力强。
参考文献:
[1] 聂光华,林和荣.选矿厂过程控制的现状及发展前景[J].矿产综合利用,2007(5):28-31.
[2] DING J L,CHAI T Y,WANG H,et al.Knowledge-based global operation of mineral processing under uncertainty[J].IEEE Transactions on Industrial Informatics,2012,8(4):849-859.
[3] ZHOU P,DAI W,CHAI T Y.Multivariable disturbance observer based advanced feedback control design and its application to a grinding circuit[J].IEEE Transactions on Control Systems Technology,2014,22(4):1474-1485.
[4] HOU Z S,JIN S T.A novel data-driven control approach for a class of discrete-time nonlinear systems[J].IEEE Transactions on Control Systems Technology,2011,19(6):1549-1558.
[5] 侯忠生,许建新.数据驱动控制理论及方法的回顾和展望[J].自动化学报,2009,35(6):650-667.
[6] 程启明,程尹曼,汪明媚,等.基于灰色预测的无模型控制在球磨机负荷控制中的仿真研究[J].仪器仪表学报,2011,32(1):87-92.
[7] 金尚泰,侯忠生,王卫红.无模型自适应控制方法在永磁直线电机控制中的应用[C]//第26届中国控制会议,张家界,2007:748-751.
[8] 苗帝,刘振娟,李宏光.精馏过程的模糊无模型自适应协调控制方法[J].计算机仿真,2013,30(1):377-381.
[9] 李西平.磨矿工业过程智能控制算法与仿真研究[D].西安:西安建筑科技大学,2006.
[10] 侯忠生,金尚泰.无模型自适应控制:理论与应用[M].北京:科学出版社,2013:34-56.
[11] 马莉,张德丰.基于广义动态模糊神经网络的算法研究[J].计算机工程与设计,2009,30(20):4727-4730.
ZHANG Yan1,2, ZHANG Jia1, DAI Yafei1
(1.College of Control Science and Engineering, Hebei University of Technology, Tianjin 300130; .Hebei Control Engineering Technology Research Center, Tianjin 300130)
Abstract:The paper took control of an important technological parameter namely hydrocyclone feeding concertration of grinding process basic circuit as study object, introduced fuzzy control according to bad parameter adaptivity of model-free adaptive control (MFAC), and proposed a fuzzy MFAC method. It gave theoretical derivation process of the method and designed a fuzzy MFAC controller. Compared with basic MFAC method and PID method, the simulation experimental results show that the fuzzy MFAC method can quickly track expected value with smaller overshoot and tracking error and has strong anti-interference performance.
Key words:grinding process; basic circuit; model-free adaptive control; fuzzy control
文章编号:1671-251X(2016)05-0076-05 DOI:10.13272/j.issn.1671-251x.2016.05.017
收稿日期:2016-01-11;
修回日期:2016-04-11;责任编辑:盛男。
基金项目:国家自然科学基金资助项目(61203323);河北省自然科学基金资助项目(F2011202094);河北省高等学校科学研究项目(Q2012079)。
作者简介:张燕(1975-),女,河北石家庄人,教授,博士,主要研究方向为智能算法、过程控制、智能假肢等,E-mail:yzhangz@163.com。
中图分类号:TD921.4/928.9
文献标志码:A 网络出版时间:2016-04-29 11:33
张燕,张佳,代亚菲.磨矿过程基础回路优化控制方法[J].工矿自动化,2016,42(5):76-80.