图1 应用ZigBee技术的PID参数整定控制方案
刘贤锋1,2, 王茗倩1, 王景胜1
(1.常州机电职业技术学院 信息工程学院, 江苏 常州 213164;2.江苏省物联网与制造业信息化工程技术研究开发中心, 江苏 常州 213164)
摘要:针对传统PID参数整定方式存在的电缆安装和布线繁琐、操作缺乏灵活性等问题,提出将ZigBee技术应用于PID控制器参数整定中,通过ZigBee无线组网方式实现PID参数整定控制器主机与现场测试设备之间的通信,从而达到使PID参数整定设备微型化、网络化、智能化的目的。仿真结果表明,运用ZigBee技术进行PID控制器参数整定可有效减少参数整定试验工作量,并提高控制器的灵活性和控制质量,扩展其适用范围。
关键词:PID控制器; 参数整定; ZigBee
PID参数整定方法众多,主要有理论计算整定法和工程整定法两大类。理论计算整定法主要依据自动控制系统的数学模型,经过理论推演计算来确定整定参数,并将计算所得数据通过工程应用进行调整和修改;工程整定法主要依赖实际工程经验,整定直接在自动控制系统的试验中进行。随着智能控制技术的发展,出现了许多自适应参数整定方法[1-5]。基于有线通信的PID参数整定方法存在电缆安装和布线繁琐、操作缺乏灵活性等问题[6]。考虑ZigBee技术具备自组织、低功耗、低复杂度、低成本等优点,且可以很方便地嵌入到各种控制设备[7]中,本文将其引入PID控制器参数自整定过程,以期降低成本,提升控制品质。
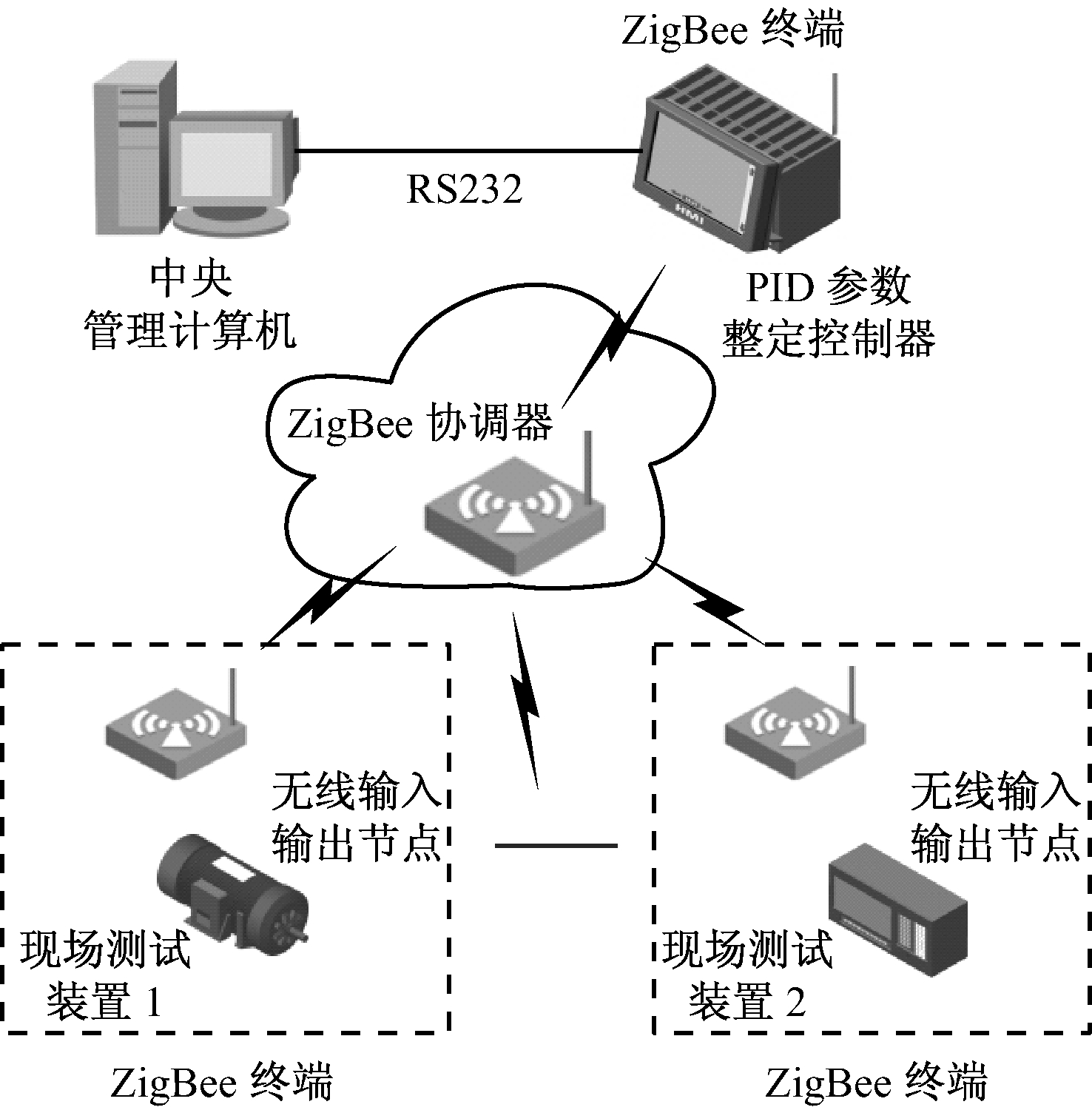
应用ZigBee技术的PID参数整定控制方案如图1所示,PID参数整定控制器主机选用嵌入式控制器ARM9TDMI。
图1 应用ZigBee技术的PID参数整定控制方案
PID控制器参数整定控制流程如图2所示。
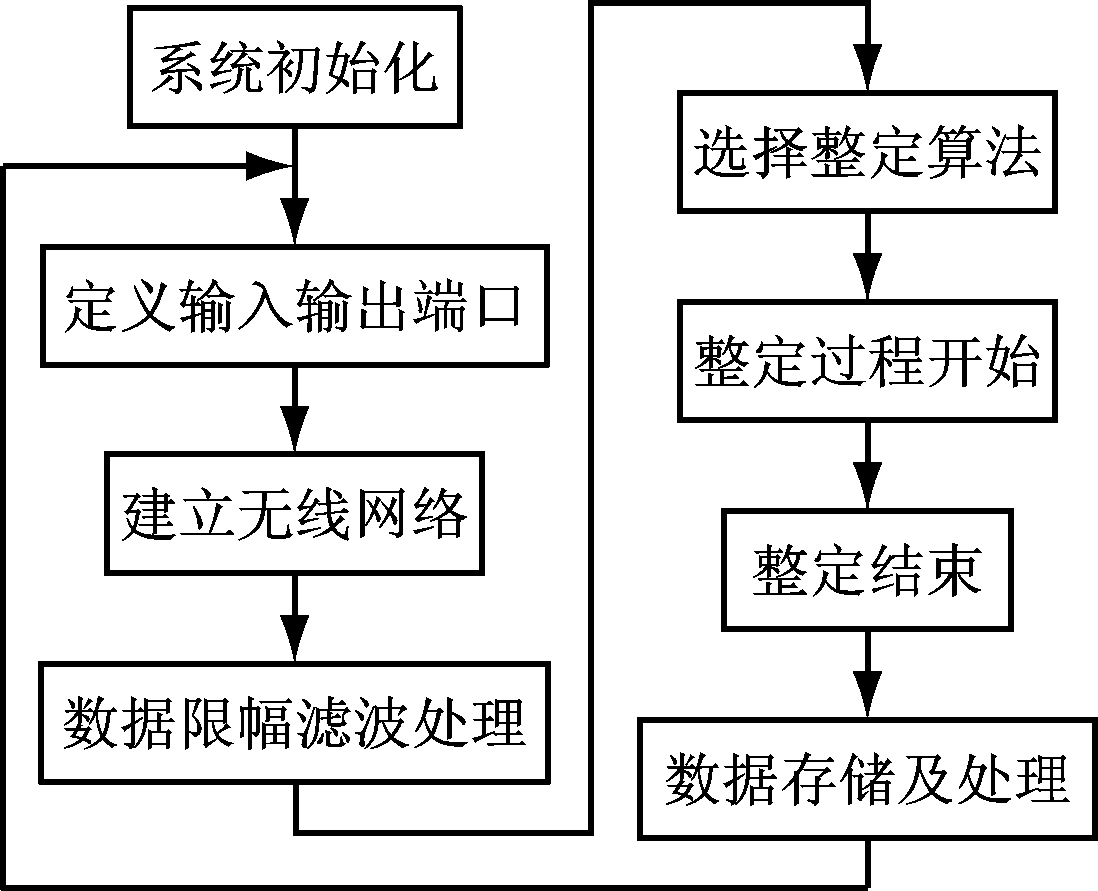
图2 PID控制器参数整定控制流程
PID参数整定控制器主机开机后,进行系统初始化,通过操作嵌入式控制器,定义不同现场无线输入输出节点的功能。通过组建ZigBee无线网络,连接控制器与多个现场无线输入输出节点,并进行数据交互。PID参数整定控制器根据现场设备的状态信号和控制信号等系统实时数据,剔除不必要的数据,以增加运算的准确性,在进行自整定运算前对数据进行限幅滤波处理。系统根据处理数据选择合适的参数整定算法[1-5],并进行PID的参数整定,运算得出适合被测现场设备的最优PID参数。
2.1 PID参数整定控制器
以ARM9TDMI1为核心的PID参数整定控制器结构如图3所示。其中,无线通信模块用于实现与现场设备的数据交互,采用了广泛应用于工业领域的射频模块CC1101;嵌入式控制器通过标准的RS232串行通信接口与中央管理计算机相连。
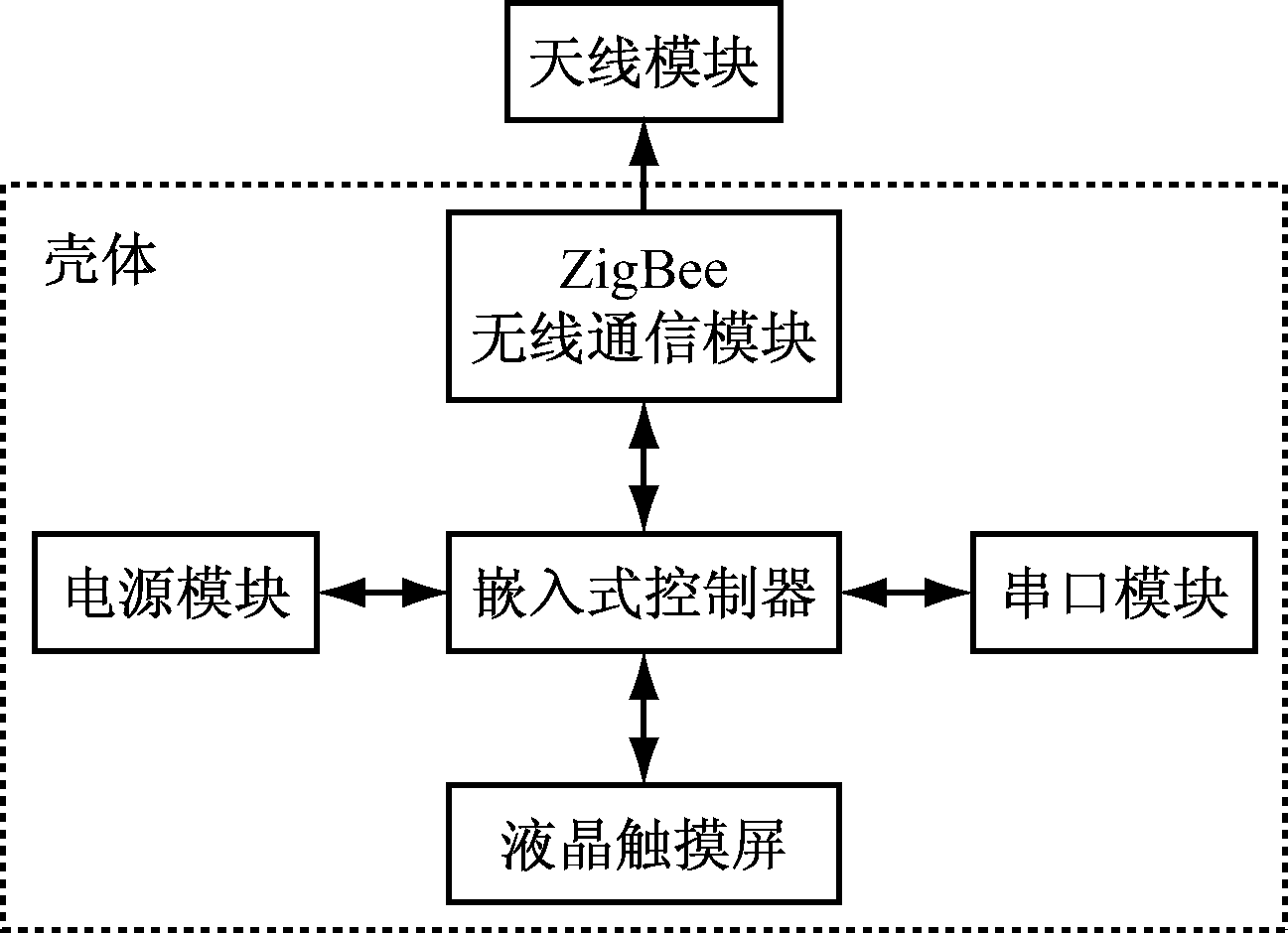
图3 PID参数整定控制器结构
2.2 无线输入输出节点
无线输入输出节点用于向PID参数整定控制器发送被测现场设备的状态信号和控制信号,它通过永磁吸力模块吸附在现场测试装置表面,在现场测量时减少了布置设备安放点的工作量。其内部结构主要包括输入模块、输出模块、CPU模块(MSP100)和射频模块(CC1101),无线输入输出节点的电路结构如图4所示。

图4 无线输入输出节点的电路结构
无线输入模块的主要功能是把现场测试装置的测量信号(如温湿度、压力等测量信号)转换成CPU模块可读取的信号值,并通过A/D端口再发送至CPU模块,通过循环采样的方式定时读取这些信号的实时值。
无线输出模块的主要功能是对现场设备发送执行命令,如输出一个0~10 V(或者4~20 mA)的标准信号作为激励信号,以控制、供气管路或水阀的开度。经脉冲带宽调制后控制信号被送入CPU模块处理。
射频模块的主要功能是实现输入输出信号的发送。CPU模块以串行通信形式将数据传输到CC1101,将数据按照ZigBee协议进行封装,再经载波调制后以无线信号的方式发射。无线输入输出节点可以通过该射频模块与其他节点组成ZigBee无线局域网,传输速率可达到250 kbit/s,直线传输距离可达到100~200 m。
ZigBee网络主要由协调器、路由器和终端三类节点所组成。协调器负责组建、管理和维护网络,为新加入的设备分配网络地址并管理节点的离开和加入等,是组建网络的核心[8];路由器主要负责识别终端节点的网络地址并选择合适的网络传输路径;终端节点主要负责数据采集,PID参数整定控制器和现场测试设备为嵌入了ZigBee无线通信模块的终端节点。
ZigBee网络组建流程如图5所示。
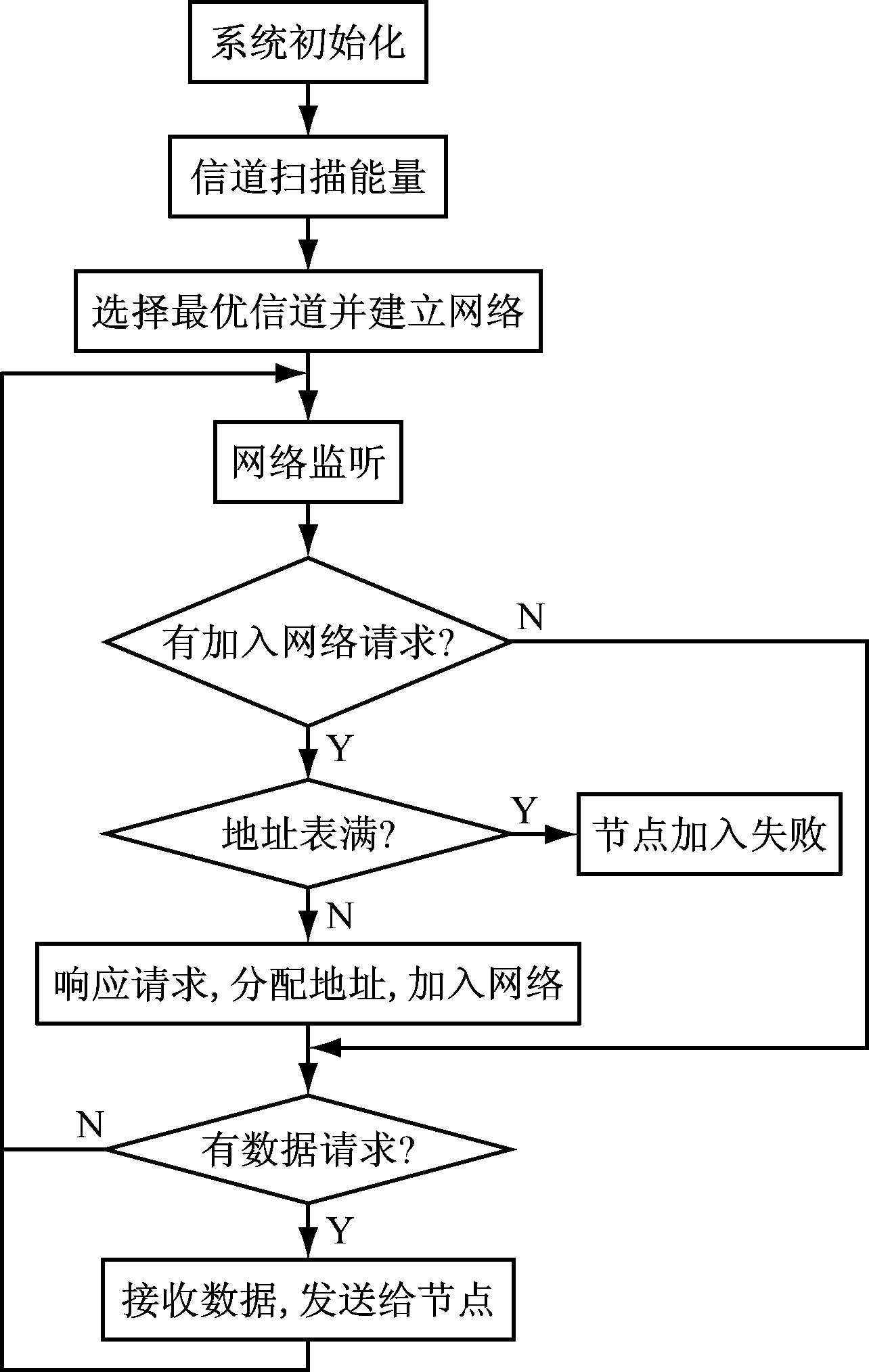
图5 ZigBee网络组建流程
(1) 系统上电,实现初始化[9]。
(2) 应用层协调器节点发出建立网络请求(即原语后),表明一个新的ZigBee网络开始建立;网络层收到请求后,要求MAC层执行信道能量扫描,寻找到可用信道后对执行活动情况进行扫描,最终找到最优信道,确定网络ID和地址,建立ZigBee网络。
(3) 路由节点和终端节点扫描已创建完成的信道,运用请求原语发现建网成功的协调器,通过NLME_JOIN_request原语请求加入到指定ID的网络;协调器收到请求后,查询节点地址列表,若列表未满则响应请求,允许该节点加入指定ZigBee网络,并为其分配唯一地址。
ZigBee通信过程:
(1) 当ZigBee局域网组建完成后,被测现场设备将自身的状态信号和所接收的控制器控制信号通过ZigBee无线网络传输至ZigBee协调器。
(2) 协调器经串行通信接口将信息输入至PID参数整定控制器中。
(3) 根据所选用的整定算法,参数整定控制器计算出最优的PID参数值,再通过协调器经ZigBee无线网络输出到现场设备的控制器,保证系统的控制性能。ZigBee通信流程如图6所示。
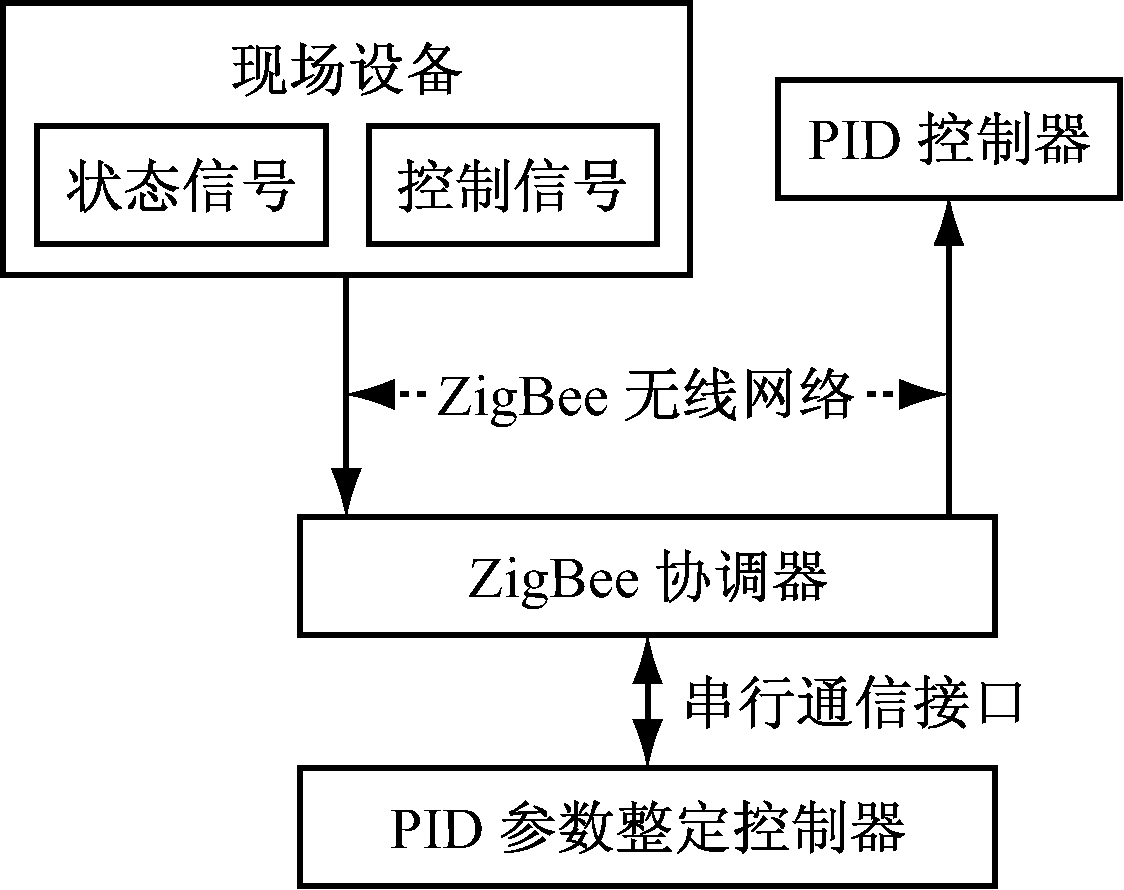
图6 ZigBee通信流程
为验证本文设计方案的可靠性,以单容液位控制系统为例进行仿真测试。该系统具有非线性、滞后、耦合等特征,能够很好地模拟工业过程。首先建立单容液位控制系统数学模型,其传递函数如图7所示。其中Q(s)和H(s)为水流输入量和液位输出量的Laplace变换形式;R(s),Y(s),E(s)分别为理想液位、实际液位和误差的Laplace变换形式;μ为调节阀开度,控制流入量Qi,由控制器LC控制;Tv为时间常数;Kv为阀门静态增益,即当系统达到稳定时阀门的增益,由于阀门为气关式,所以Kv=28 cm3/s·mA,可将阀门看成一个静态增益为Kv的一阶惯性环节;液位变送器静态增益Km为仪表的输出/输入范围,假设液位变送器为线性仪表,则其可看成是增益为Km=1 mA/cm的比例环节。假设液位的初始值为H0=16 cm,则单容水箱系统的数学模型为
(1)
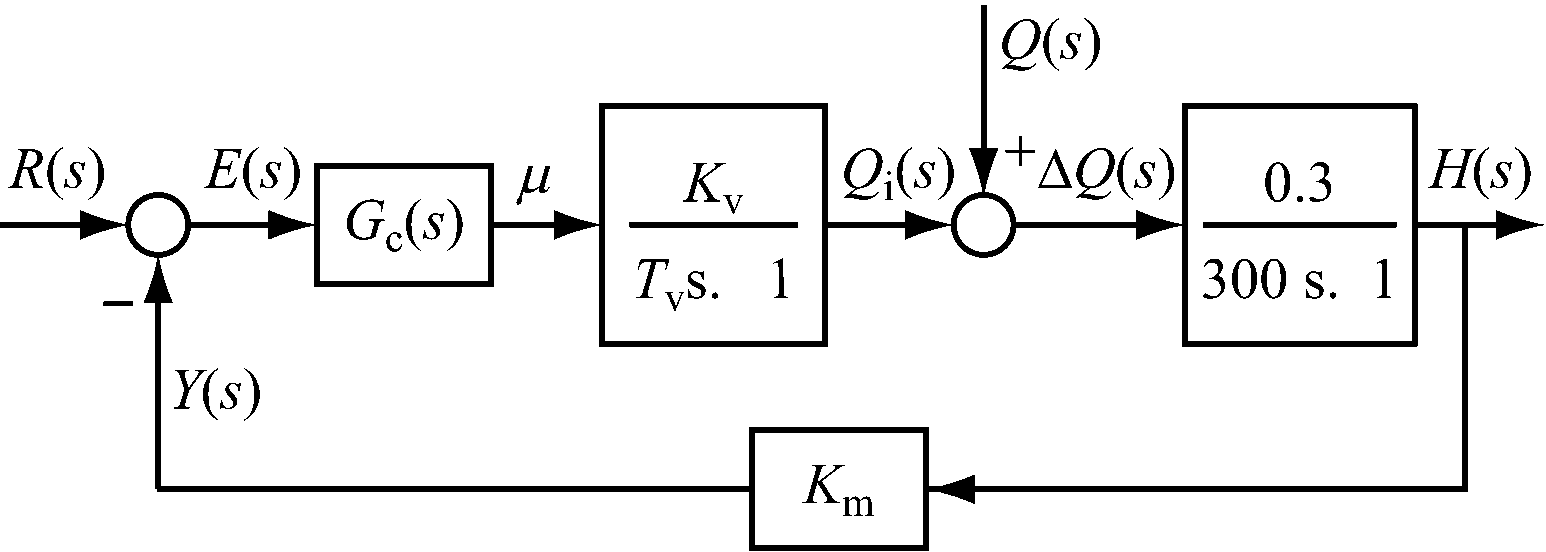
图7 单容液位控制系统的传递函数
被控对象传递函数为
(2)
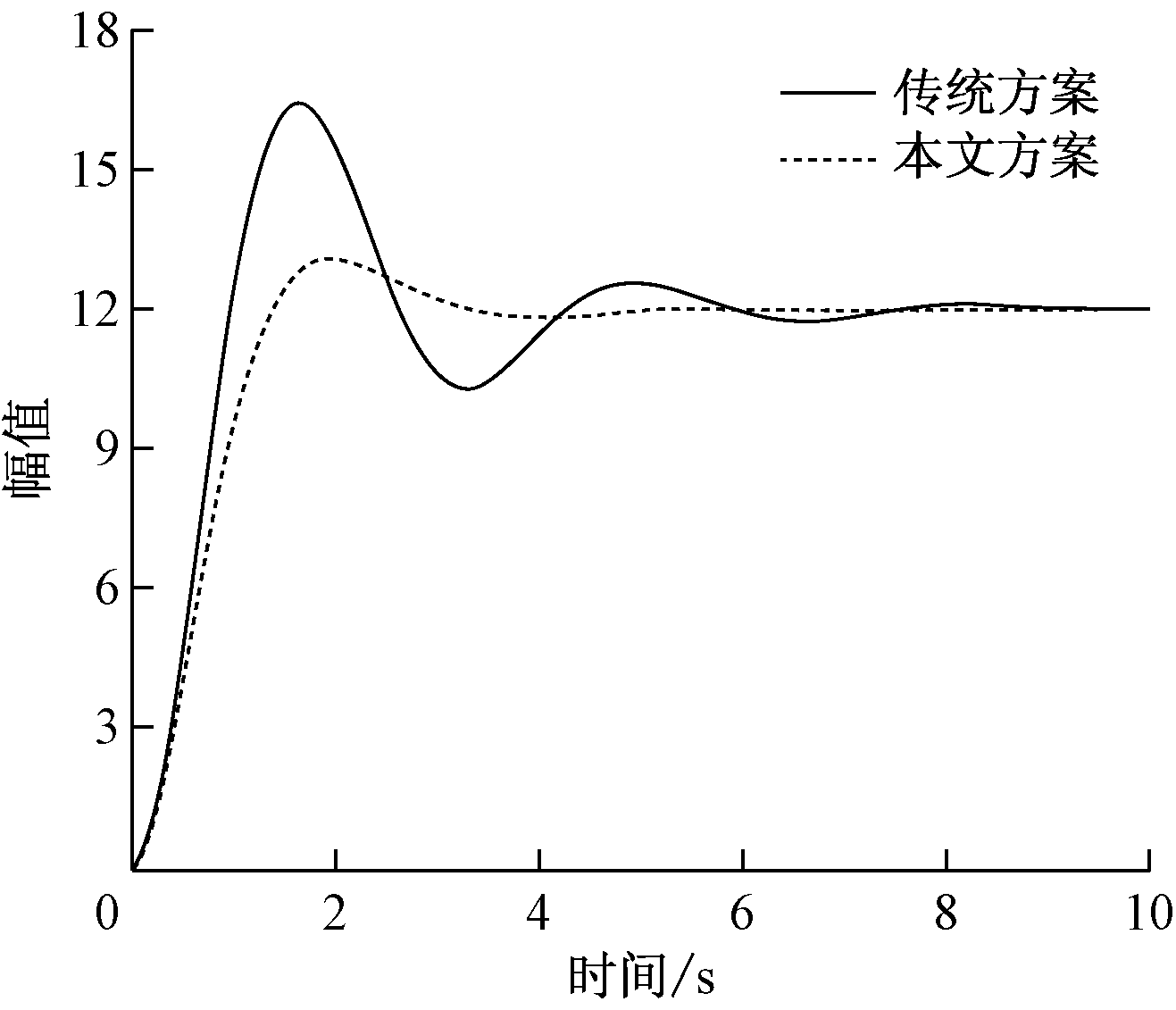
单容液位控制系统选用模糊PID控制算法,系统模型如图8所示。最后,利用Simulink对本文设计的ZigBee无线传输方案与传统有线方案进行了控制性能对比测试。仿真结构如图9所示,两者的响应性、适应性比较如图10所示。
从图10(a)中可以看出,在相同控制对象和控制条件下,2种方案均可达到控制目的,但本文方案具有更小的超调,收敛速度更快,液面在上升过程中更加稳定,动态性能优于传统方式。从图10(b)中明显发现,当系统发生动态变化时,传统传输方式下的系统超调增大,动态性能下降,而本文方案的响应曲线与原响应较接近,未发生性能改变。
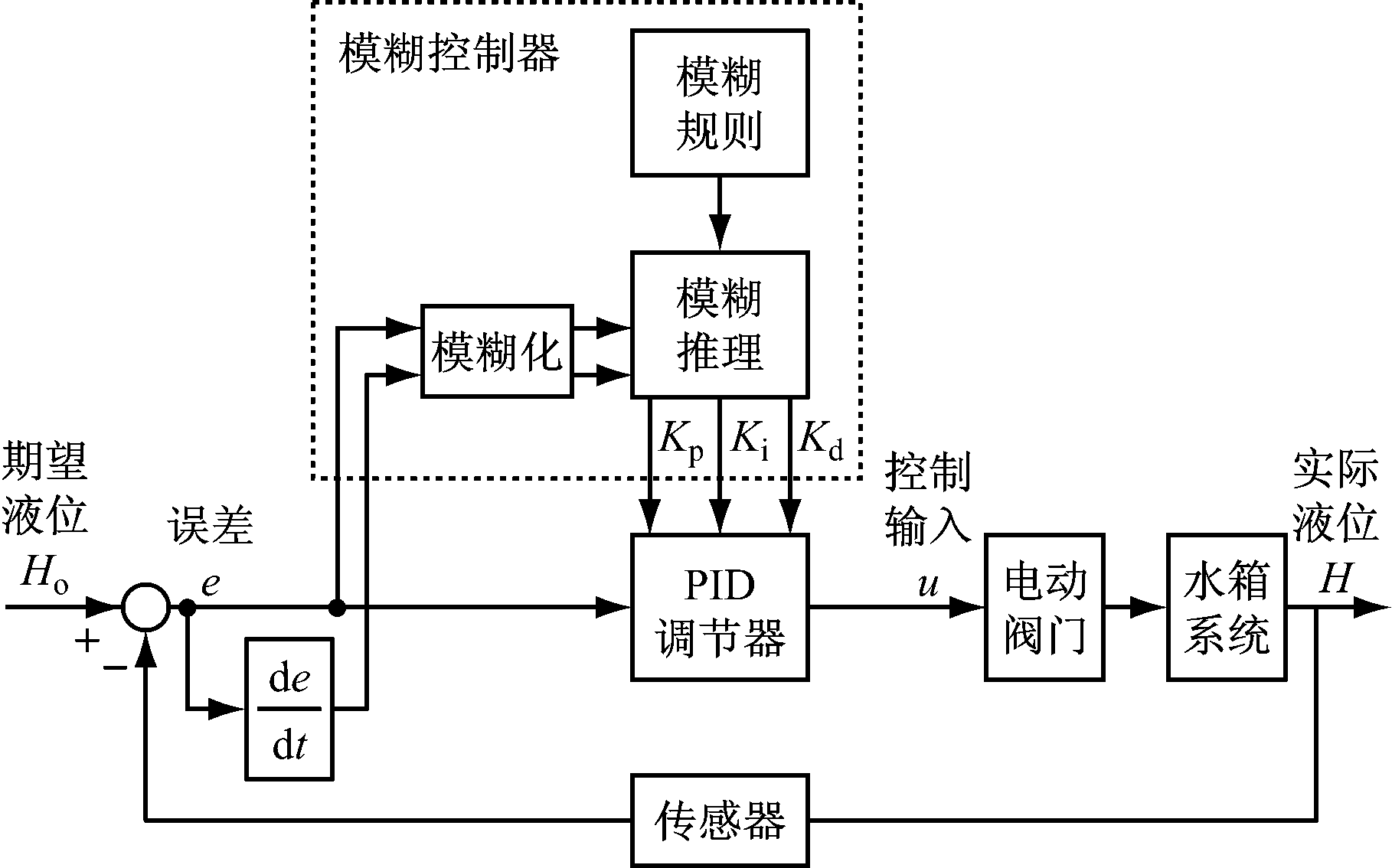
图8 单容液位控制系统模型
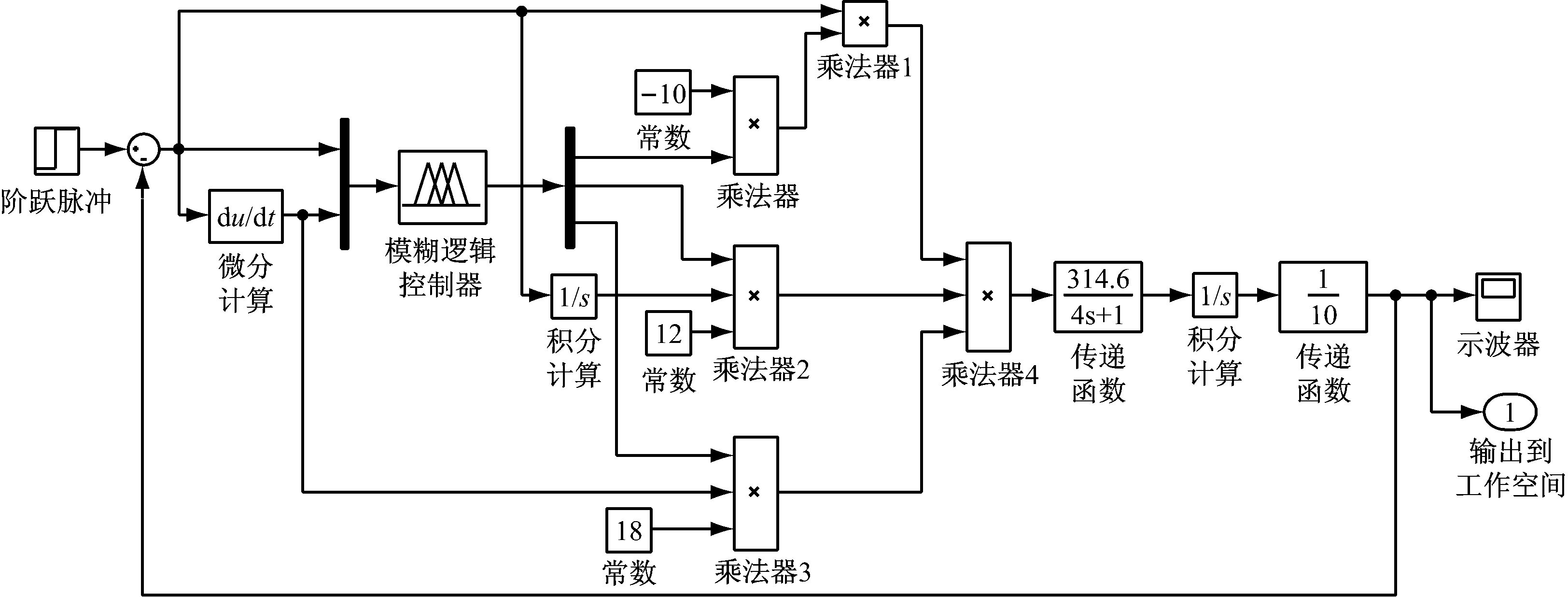
图9 Simulink仿真结构
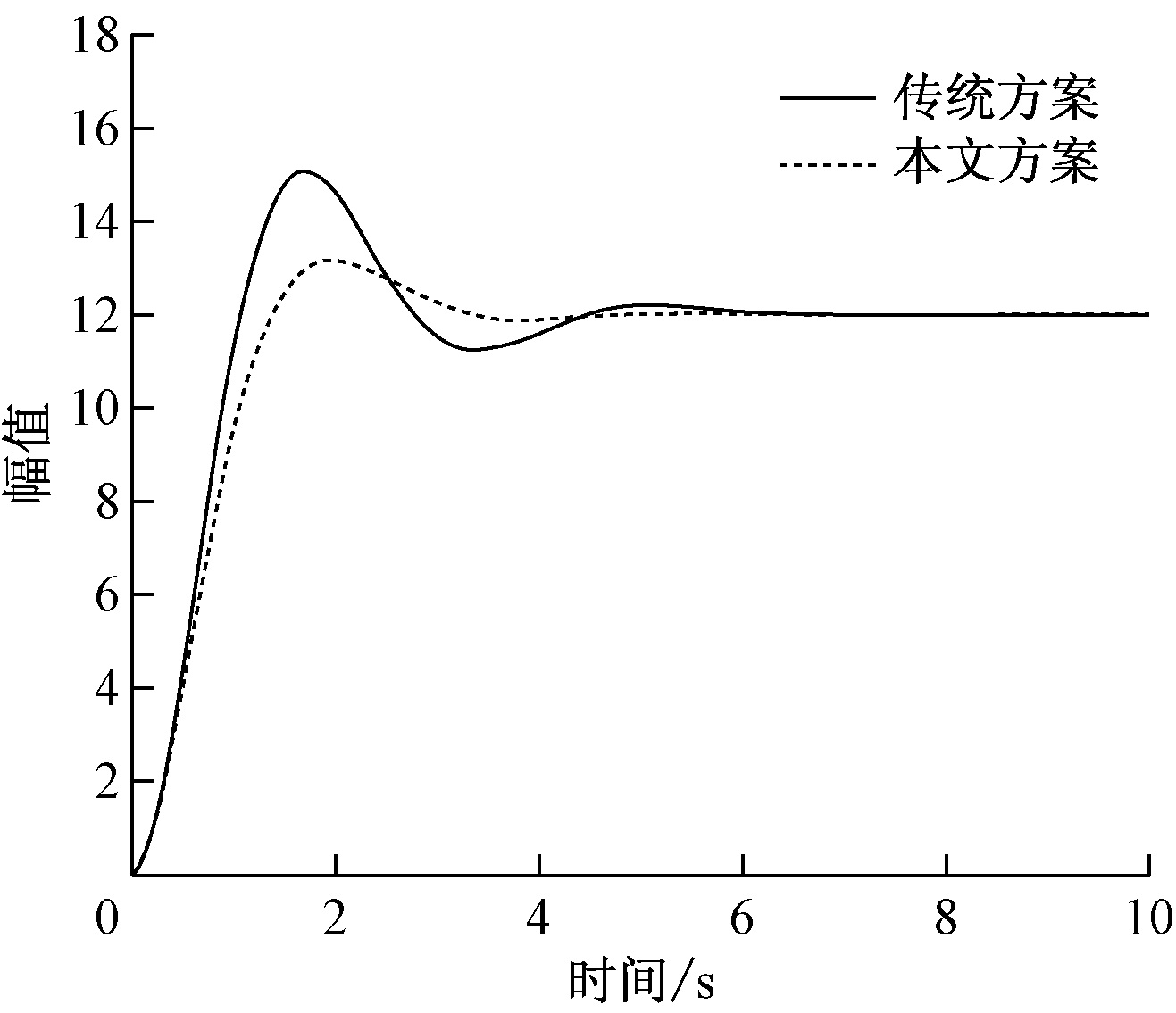
(a) 响应性
(b) 适应性
图10 2种方案的控制性能对比
介绍了应用ZigBee技术的PID参数整定控制方案及其软硬件设计,并进行了仿真分析。在PID参数整定过程中,采用无线数据传输可以有效减少数据采集和控制点的布线工程量,考虑无线输入输出节点带有永磁吸力模块,可直接把无线输入输出节点吸附在控制对象表面,从而减少布置设备安放点的工作量。在实际使用中,PID参数整定控制器主机可根据发出的激励信号值和收到的反馈信号值进行控制设备的模型识别,并计算出整定参数,从而对控制系统的布线和构建做到最大程度的保留。
参考文献:
[1] 刘慧博,王静,吴彦合.无刷直流电机模糊自适应PID控制研究与仿真[J].控制工程,2014,21(4):583-587.
[2] 黄晓舟,朱良宽,曹军.基于自适应遗传算法整定的刨花板热压系统PID控制[J].森林工程,2013,29(2):54-57.
[3] HAO Y, WANG C, SONG L. Study on fuzzy-logic PID control system of synchronous jack-up system of turbine runner static equilibrium experiment[C]//International Conference on Advanced Mechatronic Systems, 2015: 273-276.
[4] DOUNIS A I, KOFINAS P, ALAFODIMOS C, et al. Adaptive fuzzy gain scheduling PID controller for maximum power point tracking of photovoltaic system[J]. Renewable Energy, 2013, 60: 202-214.
[5] HAN J, ZHU Z, JIANG Z, et al. Simple PID parameter tuning method based on outputs of the closed loop system[J]. Chinese Journal of Mechanical Engineering, 2016, 29(3): 465-474.
[6] 王公堂,李艳华,杨宝.基于Zigbee的温度湿度监测系统的研究[J].电子设计工程,2013,21(1):63-66.
[7] SAMUEL A, KARYONO K. ZLeAp: Application for wireless sensor network (ZigBee) learning tool[C]//2015 3rd International Conference on New Media, 2015:1-5.
[8] 陈健.基于ZigBee的无线工业监测监控系统[D].西安:西安科技大学,2012.
[9] 庄华勇,伍川辉.基于ZigBee的高速动车组车内温湿度监测系统设计[J].中国测试,2013,39(2):85-88.
Research on application of ZigBee technology in PID controller parameter tuning
LIU Xianfeng1,2, WANG Mingqian1, WANG Jingsheng1
(1.School of Information Engineering, Changzhou Institute of Mechatronic Technology, Changzhou 213164, China; 2.Jiangsu Internet of Things and Manufacturing Industry Informatization Engineering Technology Research and Development Center, Changzhou 213164, China)
Abstract:In view of problem of traditional PID parameter tuning such as installation and wiring of cable are quite cumbersome,operation lacks flexibility, the paper proposed to apply ZigBee technology to PID parameter tuning. Communication between PID parameter tuning controller host and field test equipment is achieved through ZigBee wireless networking method, so as to achieve the purposes of making PID parameter tuning device miniaturization, networking and intelligent. Simulation results show that the ZigBee technology can effectively reduce workload of parameter tuning experiment and improve flexibility and control quality of the PID controller, and extend its scope of application.
Key words:PID controller; parameter tuning; ZigBee
收稿日期:2016-10-20;
修回日期:2016-11-03;责任编辑:胡娴。
基金项目:江苏省科技厅产学研联合创新资金前瞻性联合研究项目(BY2015031-01);江苏省高校“青蓝工程”中青年学术带头人培养对象资助项目(苏教师〔2014〕23号)。
作者简介:刘贤锋(1974-),男,江苏南京人,副教授,硕士,主要研究方向为软件工程、计算机控制、物联网工程等,E-mail:9755724@qq.com。
文章编号:1671-251X(2016)12-0088-05
DOI:10.13272/j.issn.1671-251x.2016.12.019
中图分类号:TD655.3
文献标志码:A
网络出版:时间:2016-12-01 10:59
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20161201.1059.019.html
刘贤锋,王茗倩,王景胜.ZigBee技术在PID控制器参数整定中的应用研究[J].工矿自动化,2016,42(12):88-92.