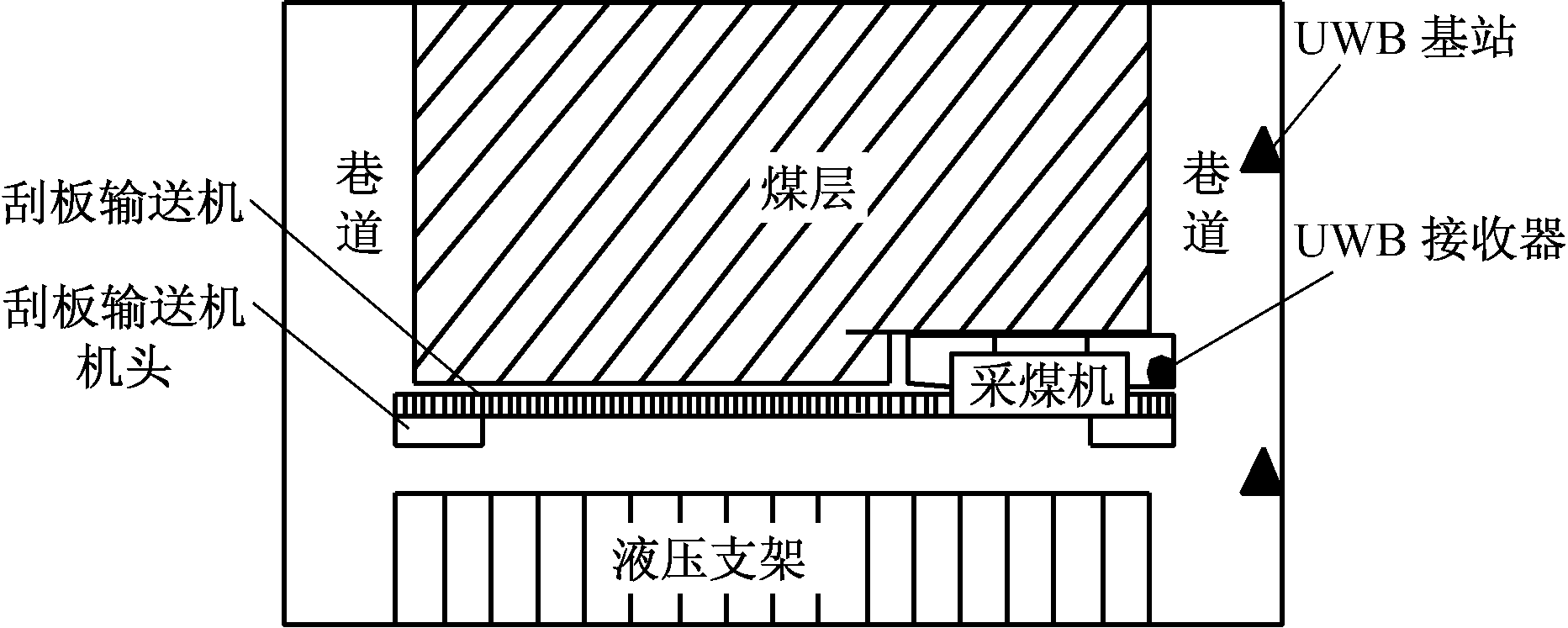
图1 采煤机工作至刮板输送机机头位置
实验研究
刘一鸣, 刘万里, 张博渊, 杨滨海
(中国矿业大学 机电工程学院, 江苏 徐州 221116)
摘要:针对在矿井中采用UWB定位系统获取采煤机位置坐标时精度较低等问题,提出了一种基于UWB的采煤机定位精度提升算法,该算法利用信息过滤算法处理多种信号值的能力对UWB定位结果进行过滤,利用神经网络算法评估优化的能力对采煤机位于刮板输送机机头位置某个时间段内的数据信息进行评估,实现对采煤机的精确定位。实验结果表明,对定位结果进行过滤处理后,三维精度可达7 cm左右,经神经网络算法处理后,定位精度可提升至2~3 cm。
关键词:煤炭开采; 采煤机定位; UWB; 信息过滤; 神经网络
UWB(Ultra Wide Band,超宽带无线通信技术)是利用脉冲信号进行高速无线数据传输的短程通信技术,其具有抗干扰能力强、抗多径及穿透性强等优点,早期被应用于近距离高速数据传输,近年来UWB脉冲信号被用来实现三维精确定位、雷达追踪等功能[1-2]。在矿井开采过程中,当采煤机在工作面工作时,使用惯性导航定位可以实现对采煤机实时位置的获取,然而由于单纯的惯性导航定位存在因累积误差不断增大而定位失准等问题,所以,需要采用一种技术在采煤机工作至刮板输送机机头位置时,对采煤机位置进行重新校准。当前煤矿井下常用的定位校准方式主要有红外、蓝牙、WiFi、ZigBee等,然而在井下对采煤机位置进行定位时应考虑到矿井的特殊性。红外定位容易受到煤矿井下遮挡物、粉尘、水分的影响而产生较大的误差;蓝牙技术尚未成熟,并不能完全应用在井下定位领域;而WiFi、ZigBee定位技术容易受到煤矿井下非视距传播、多址干扰及多径传播的影响,精度往往无法达到预定的要求[3-4]。因此,随着UWB技术的逐步成熟,同时考虑UWB抗干扰能力强、安全可靠等特点,可利用UWB技术建立采煤机定位系统,对采煤机位置进行校正,修正惯性导航定位的误差[5]。
随着煤矿井下采煤环境恶劣程度的加剧,人们对UWB采煤机定位系统的精度提出了更高要求。当前,对井下UWB定位精度提升的研究主要通过分析UWB信号的本身特性、信号在矿井中的传播途径、信号结果过滤及处理方法等方式[6-7]。针对UWB信号结果过滤及处理过程,齐珑、朱永龙等[8-9]提出基于卡尔曼滤波的定位系统研究方案,使用卡尔曼滤波进行信号滤波。但是在井下建立模型时,由于使用多种信号定位,模型建立比较困难。乔梁、沈冬冬等[10-11]提出了基于神经网络思路的改进方式,但是其是对信号值直接训练,忽略了信号值本身对精度的影响。参考文献[12]提出了一种基于最小二乘法加权的UWB信号值处理方式,能够实现对信息结果整合的效果,但是采用最小二乘法容易引起权值分配不合理。针对以上问题,本文提出通过采用信息过滤、神经网络算法等方式提升采媒机定位精度,利用信息过滤算法处理多种信号结果的能力对信号值进行过滤,提升结果本身的精度;利用神经网络的评估优化能力,对一定环境下一段时间内的数据进行分析,获取最优坐标结果,实现对采煤机的精确定位。
采煤机工作至刮板输送机机头位置时(图1),通过布置UWB基站,建立UWB定位系统,完成对采煤机位置的重新定位校准,以修正惯性导航定位的误差。在常用UWB定位方式中,一般有基于接收信号能量(RSSI)、基于接收信号角度(AOA)及基于接收信号时间(TOA或TDOA)等定位方式[13-14]。当前,由于井下环境复杂,单一的定位方式往往受限于其本身特性而具有无法消除的误差,不能实现精确定位。所以,定位系统一般采用联合定位的方式,本文中采用TDOA与AOA结合的方式实现定位,利用TDOA定位具有易于实现且时间同步误差小等优点,同时考虑到井下无法大规模布置UWB基站,TDOA精度易受影响,故采用AOA进行辅助,补充定位信息。
图1 采煤机工作至刮板输送机机头位置
1.1 信息过滤算法
在井下刮板输送机机头定位中,UWB定位系统可以获取到AOA及TDOA联合的定位结果,包含了AOA、TDOA两种定位信息,同时定位应考虑采煤机运行至刮板输送机机头时的理论位置,因此,提出利用信息过滤算法处理不同信号值的能力,综合多种信息以获取精确位置坐标。信息滤波原理类似于卡尔曼滤波算法,通过状态方程与量测方程的结合实现对当前获取的信息的提升。参考文献[15]给出了信息过滤算法基本原理,根据刮板输送机机头定位要求,对几种不同的信息进行处理,同时考虑理论位置坐标,建立信息滤波模型。假设当前噪声为高斯白噪声,Y(k|k)为k时刻的定位信息矩阵,可表示为
Y(k|k)=P-1(k|k)
(1)
式中P-1(k|k)为k时刻的协方差矩阵。
Y(k|k)矩阵内向量![]() 为该状态下具体信息内容,在采煤机定位过程中
为该状态下具体信息内容,在采煤机定位过程中![]() 代表了采煤机到达刮板输送机机头位置时的三维坐标(x,y,z)。由于刮板输送机机头定位可近似为静态定位,故用于预测的信息向量如下:
代表了采煤机到达刮板输送机机头位置时的三维坐标(x,y,z)。由于刮板输送机机头定位可近似为静态定位,故用于预测的信息向量如下:
(2)
式中:k-1为k时刻上一时刻;![]() 为通过k-1时刻所推算出的k时刻的理论状态值;L(k|k-1)为k-1时刻到k时刻的推算方程;
为通过k-1时刻所推算出的k时刻的理论状态值;L(k|k-1)为k-1时刻到k时刻的推算方程;![]() (k-1|k-1)为k-1时刻的坐标信息。
(k-1|k-1)为k-1时刻的坐标信息。
理论上,采煤机每次到达刮板输送机机头时的位置:在机头位置局域坐标系内,x及z方向坐标不变,y方向坐标是上一次坐标与采煤机滚筒厚度δ之和,则![]() 具体可以表述为(x(k-1),y(k-1)+δ,z(k-1))。综上,状态方程给出了当前时刻的采煤机理论坐标。
具体可以表述为(x(k-1),y(k-1)+δ,z(k-1))。综上,状态方程给出了当前时刻的采煤机理论坐标。
同时,根据实际得到的UWB定位信息,建立相应的量测方程,量测向量一般形式为
i(k|k)=HT(k)R-1(k)z(k)
(3)
式中:HT(k)表示对量测值修正的转置矩阵;R-1(k)表示噪声的逆矩阵;向量z(k)表示本次实际定位得到的三维坐标。
量测矩阵I(k|k)为
I(k|k)=HT(k)R-1(k)z(k)
(4)
在定位过程中,当状态更新时,根据状态方程和实际的量测值,采用信息过滤算法进行综合评估。
(5)
因此,在刮板输送机机头位置校准过程中,UWB基站获取到AOA、TDOA信息,此时利用不同方式获得的结果及推算出的理论位置,采用信息过滤,最终给出修正后的三维定位坐标。
1.2 神经网络算法评估
在UWB采煤机定位中,采煤机在刮板输送机机头位置有一定时间的停留,而UWB信号为脉冲发射,采样频率高,因此,会得到一定量的信息过滤结果,故利用神经网络对数据的评估能力,对定位信息进行处理,得到最终定位结果。
神经网络是一种信息处理的算法模型,通过各个节点相互连接的关系实现对数据的处理。根据机头位置处UWB采煤机定位系统的实际情况,建立神经网络模型。在机头校准的过程中,神经网络分为2个阶段:第1阶段为训练阶段,在训练阶段,假设送入神经网络输入层的定位结果为(x1,y1,z1),(x2,y2,z2),…,(xN,yN,zN),则输入层向量P表示如下:
P=[(x1,y1,z1),(x2,y2,z2),…,(xN,yN,zN)]
(6)
输出层输出该时刻实际得到的定位坐标O,O=[(x,y,z)]。同时,根据经验公式选择隐含层节点数为S。
假设Pj表示输入层第j个节点的输入,j=1,2,…,N;wij表示隐含层第i个节点到输入层第j个节点之间的权值;θi表示隐含层第i个节点的阈值;Ø(x)表示隐含层的激励函数;wi表示输出层到隐含层第i个节点之间的权值,i=1,2,…,S;τ表示输出层的阈值;φ(x)表示输出层的激励函数,则信号的前向传播过程如下:
隐含层第i个节点的输入neti:
neti=wi1P2+wi2P2+wi3P3+…+wijPj+θi
(7)
隐含层第i个节点的输出yi:
yi=Ø(neti)
(8)
输出层输入net:
![]() Ø(neti)+τ
Ø(neti)+τ
(9)
输出层输出O:
O=φ(net)
(10)
对于每次输入的神经网络定位信息,定义误差函数![]() 其中,T为预期的输出值,则误差反向传递中,输出层权值变化公式为
其中,T为预期的输出值,则误差反向传递中,输出层权值变化公式为
(11)
式中:η为设置的步长;φ(net)为导函数。
输出层阈值变化调整公式为
(12)
隐含层权值变化调整公式为
(13)
式中Ø(net1)为导函数。
隐含层阈值变化调整公式为
![]() Ø(net1)
Ø(net1)
(14)
训练阶段将UWB定位数据作为训练时的输入层,真实坐标作为预期输出,通过训练对神经网络各项权值进行调整,结束神经网络第1阶段。在神经网络第2阶段,将实测中UWB定位系统给出的结果作为输入层,各项权值均为训练权值,通过网络运算,输出定位结果(x,y,z)。
综上所述,UWB定位精度提升流程可以描述如下:当采煤机运行至刮板输送机机头位置时,使用信息过滤算法处理定位信息并得出定位坐标,之后将一段时间内的定位结果送入神经网络进行评估,得出最终坐标值。
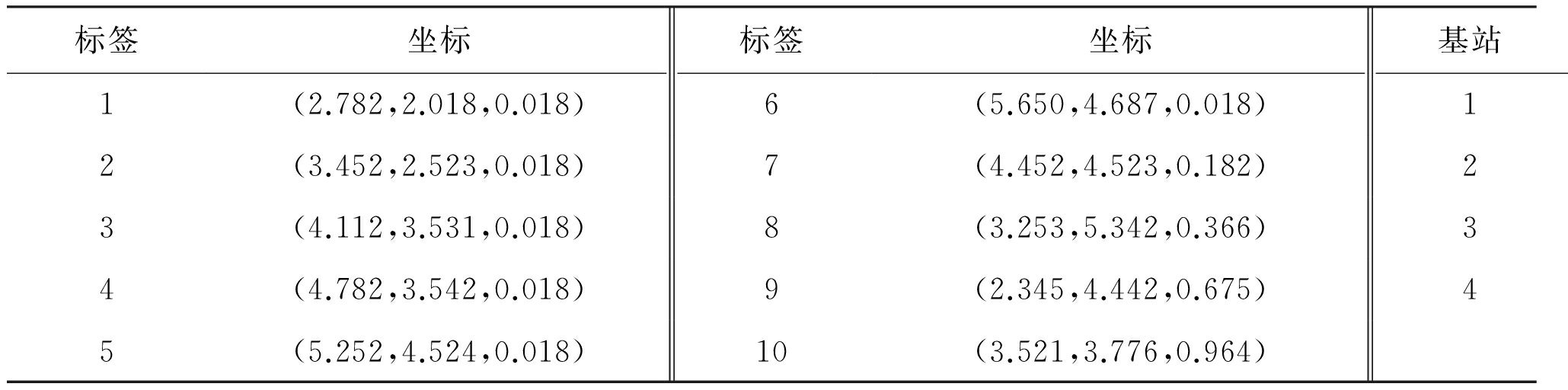
为验证信息过滤算法、神经网络算法对UWB定位精度的提升效果,采用基于UWB技术的Ubisense定位系统平台进行实验。在空间区域内布置4个UWB基站,为了测试到所有状态下的定位精度,随机布置10个定位标签,采用AOA信息结果作为状态方程结果模拟理论值。UWB基站布置如图2所示,根据实际环境建立局部坐标系,同时定义x,y,z轴方向。测定4个UWB基站的实际坐标及10个UWB定位标签的实际坐标,具体坐标值见表1。定位精度可由三维定位精度σP进行评价。
(1) 计算x,y,z轴3个方向上的残差(Δx,Δy,Δz):Δxi=|x0-xi|,Δyi=|y0-yi|,Δzi=|z0-zi|。

图2 UWB基站布置
(2) 计算三维精度
表1 UWB基站及定位标签位置坐标
在所处环境中设置一定干扰和遮蔽以模拟井下环境,在未经算法处理时,定位系统测定结果及三维定位精度见表2,测定结果三维空间位置如图3所示。
表2 未经算法修正定位系统测量结果


图3 未经算法处理时的UWB定位系统测定坐标位置
经计算可得三维精度σP=14,符合UWB定位系统在一般环境下的定位精度,即10~20 cm。此时采用信息过滤算法对数据进行处理,经算法过滤后,位置坐标见表3,空间位置如图4所示。
表3 经信息过滤算法修正后的定位系统测量结果

计算可得σP=7,即表面空间三维精度为7 cm。根据表3数据及图4空间分布可以清晰看出,在x及y方向,定位误差已经大大减小,但是在z方向,仍存在较大误差。因此,采用神经网络算法对数据进行进一步评估,尤其是对z方向上存在的误差进行缩减。将UWB定位系统校验时得到的定位数据及真实坐标送入神经网络作为第1组训练值和目标值,以确定各层之间的阈值及权重因子分配。在保持环境条件大致不变的情况下,将实验得到的坐标送入神经网络输入层进行训练,输出的标签位置坐标及精度见表4,空间位置分布如图5所示。
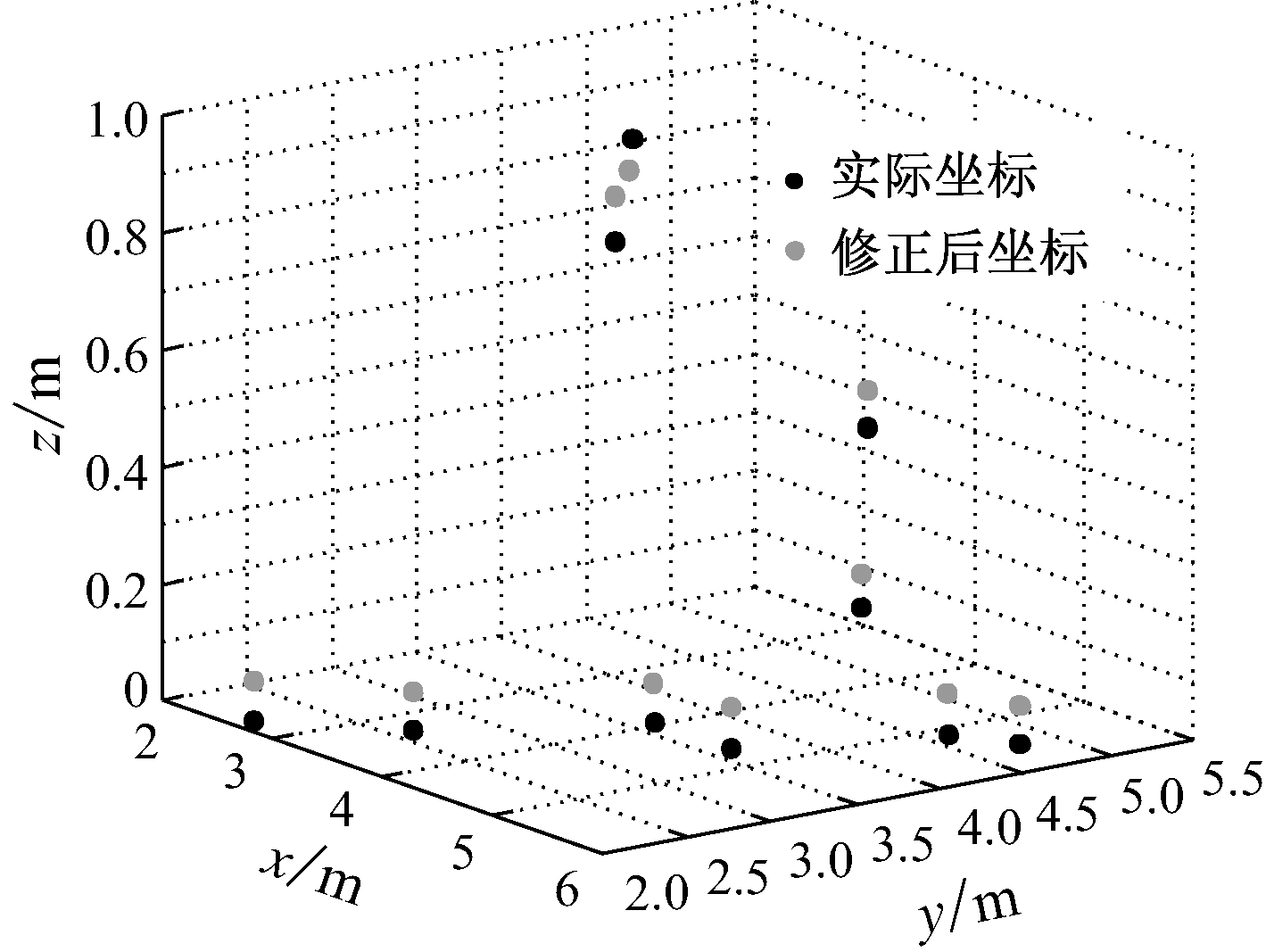
图4 经信息过滤算法修正后的定位结果空间位置分布
表4 经神经网络算法修正后的标签坐标

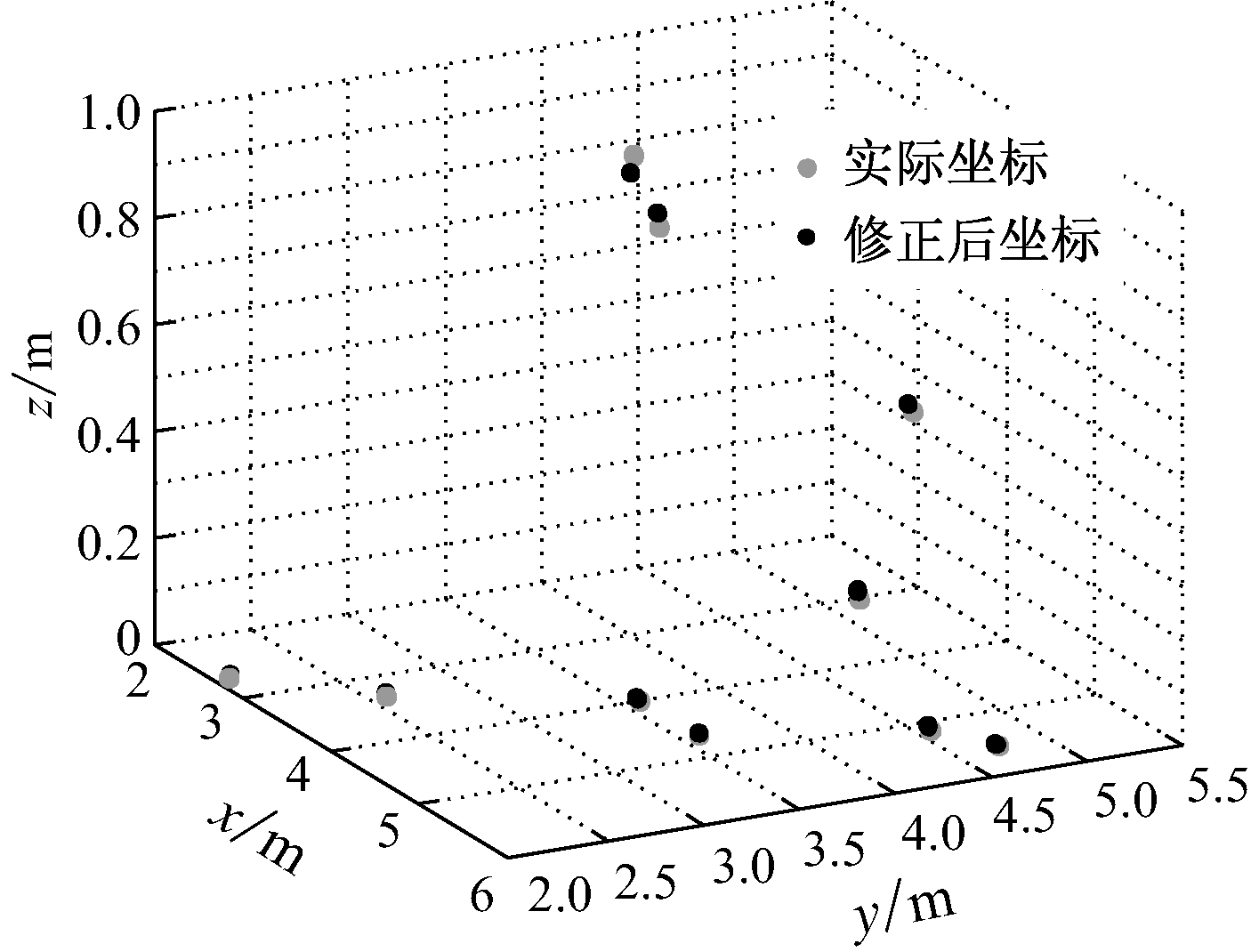
图5 经神经网络算法修正后的定位结果空间位置分布
此时,σP=2.3,表明三维定位精度为2~3 cm。从图5可以清晰看出,实际坐标和经过2种算法修正后的坐标基本重合,神经网络对z轴上的精度有明显的提升。
为了更好地验证2种算法的性能,图6、图7分别给出了当基站数目分别为2和3时的定位位置三维空间分布。依据图6、图7,在2个基站的情况下,定位结果经2种算法修正后与实际坐标仍有差距,这是由于此时只能通过AOA与TDOA联合定位,获取的信息少,定位容易受到干扰。在3个基站的情况下,2种算法的修正效果良好。
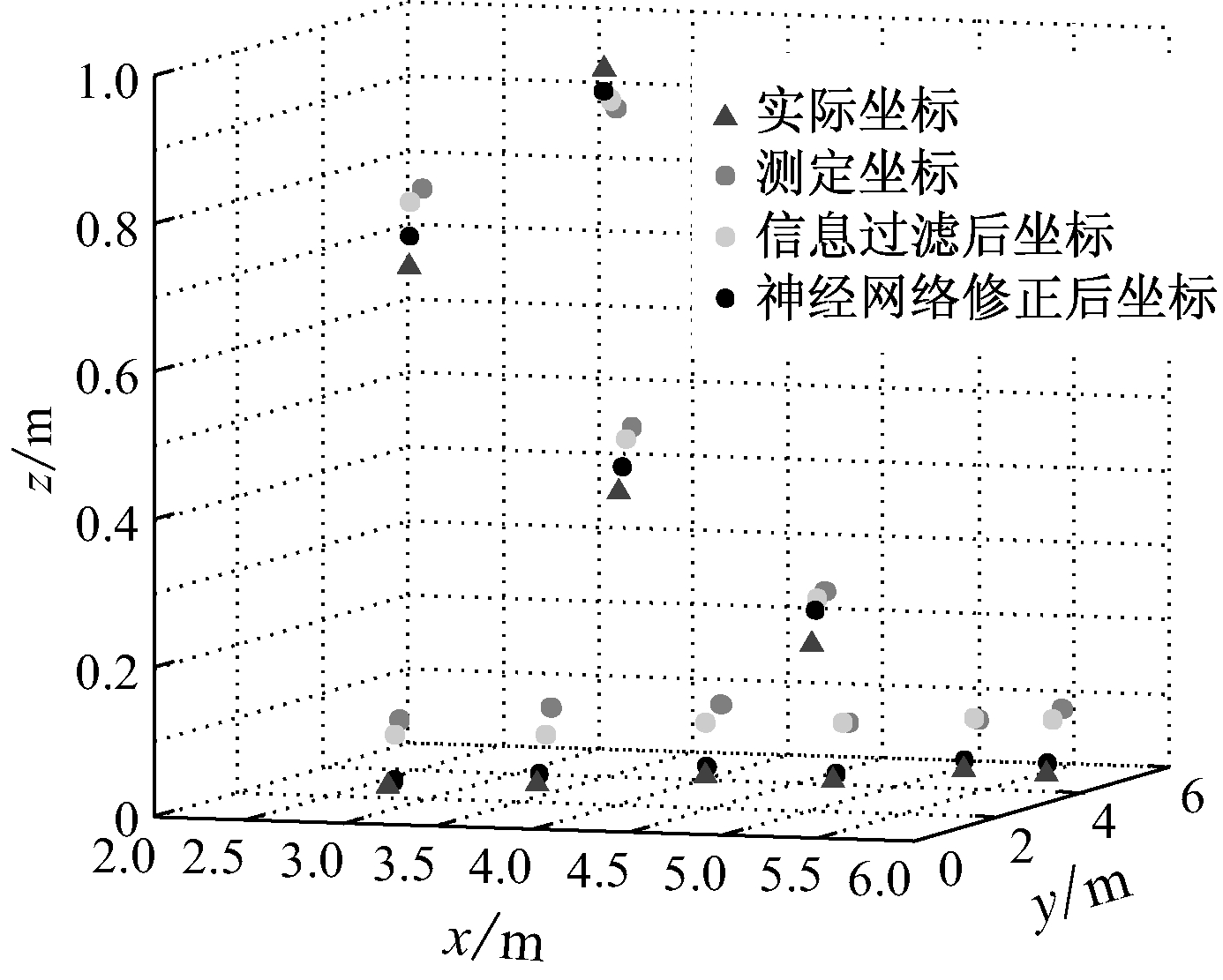
图6 2个基站情况下定位结果空间位置分布

图7 3个基站情况下定位结果空间位置分布
针对当前井下UWB定位系统精度较低的现状,提出了采用信息过滤算法、神经网络算法依次对定位数据进行处理的定位精度提升算法。实验结果表明,采用信息过滤算法后,定位坐标在x及y方向上精度有较大提升,定位精度达到7 cm左右,相比于未经信息过滤时精度提升了50%;对采用过滤算法后一定时间内的信息结果进行神经网络评估,精度可以达到2 cm左右,极大地提升了原有定位系统的精度,增强了系统的抗干扰能力及稳定性。但采用神经网络进行评估的基础是周围环境没有发生很大的变化,因此,应继续深入研究神经网络算法,以实现当周围环境发生变化时,定位精度提升算法能够自我修正参数,实现对采煤机的精确定位。
参考文献:
[1] 张鲁川,董磊.浅析UWB定位技术的应用[J].科技创新与应用,2015(19):285-285.
[2] IMMOREEV I Y. Practical application of UWB technology[J]. IEEE Aerospace and Electronic Systems Magazine, 2010,25(2):36-42.
[3] 丁龙.煤矿井下UWB人员定位研究[D].哈尔滨:黑龙江科技大学,2013:1-5.
[4] 李秀凤,吴静然,刘晓文.基于捷联惯导的采煤机定位系统研究[J].工矿自动化,2013,39(11):53-56.
[5] 李昂.采煤机采区绝对定位定姿技术研究[D].徐州:中国矿业大学,2015:5-9.
[6] 衡芹,李世银,张国旺,等.矿井巷道MB-OFDM超宽带无线信道建模及仿真[J].煤炭科学技术,2011,39(1):83-86.
[7] 王艳芬.矿井超宽带无线通信信道模型研究[D].徐州:中国矿业大学,2009:10-12.
[8] 齐珑.基于卡尔曼滤波的超宽带无线定位系统研究[D].北京:北京邮电大学,2012:7-9.
[9] 朱永龙.基于UWB的室内定位算法研究与应用[D].济南:山东大学,2013:10-12.
[10] 乔梁,王卫锋.基于神经网络的TDOA定位改进算法研究[J].河南师范大学学报(自然科学版),2014,42(4):2-3.
[11] 沈冬冬,李晓伟,宋旭文,等.基于多层神经网络的超宽带室内精确定位算法[J].电子科技,2014,27(5):161-163.
[12] LI W C, WEI P, XIAO X C. A robust TDOA-based location method and its performance analysis[J]. Science in China Series F: Information Sciences,2009,52(5):876-882.
[13] 李思奇,陈怀新.非视距误差的TDOA/AOA混合定位算法[J].通信技术,2010(9):133-135.
[14] 黄欢.基于TDOA的煤矿井下无线传感网络定位技术研究[D].徐州:中国矿业大学,2014:37-38.
[15] SUKKARIEH S. Low cost, high integrity, aided inertial navigation systems for autonomous land vehicles[D]. Sydney, Australia: The University of Sydney, 2000.
Research of precision improving algorithm of shearer positioning based on UWB
LIU Yiming, LIU Wanli, ZHANG Boyuan, YANG Binhai
(School of Mechanical and Electrical Engineering, China University of Mining and Technology, Xuzhou 221116, China)
Abstract:In view of problem of low precision of using UWB positioning system to obtain position coordinates of shearer, a precision improving algorithm of shearer positioning based on UWB was put forward. The algorithm uses ability of analysis of various signal values of information filter algorithm to filter UWB positioning results, and uses ability of optimal solution of neural network algorithm to evaluate positioning information during certain period when the shearer stays at the head position of scraper conveyer, in order to realize accurate shearer positioning. The experiment results show that after using information filter algorithm to process positioning results, the 3D accuracy can reach 7 cm, and after the application of neural network algorithm, the positioning accuracy can reach 2~3 cm.
Key words:coal mining; shearer positioning; UWB; information filter; neural network
收稿日期:2016-08-08;
修回日期:2016-11-16;责任编辑:张强。
基金项目:国家自然科学基金项目(51304190);国家自然科学基金联合基金项目(U1510116);山西省煤基重点科技攻关项目(MJ2014-05)。
作者简介:刘一鸣(1991-),男,山东济南人,硕士研究生,主要研究方向为UWB定位等,E-mail:1285106490@qq.com。通信作者:刘万里(1979-),男,河南商丘人,副教授,博士,主要从事井下精确定位等方面的研究工作,E-mail:jinglingbuku1217@163.com。
文章编号:1671-251X(2016)12-0025-06
DOI:10.13272/j.issn.1671-251x.2016.12.006
中图分类号:TD655.3
文献标志码:A
网络出版:时间:2016-12-01 10:13
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20161201.1013.005.html
刘一鸣,刘万里,张博渊,等.基于UWB的采煤机定位精度提升算法研究[J].工矿自动化,2016,42(12):25-30.