Abstract:
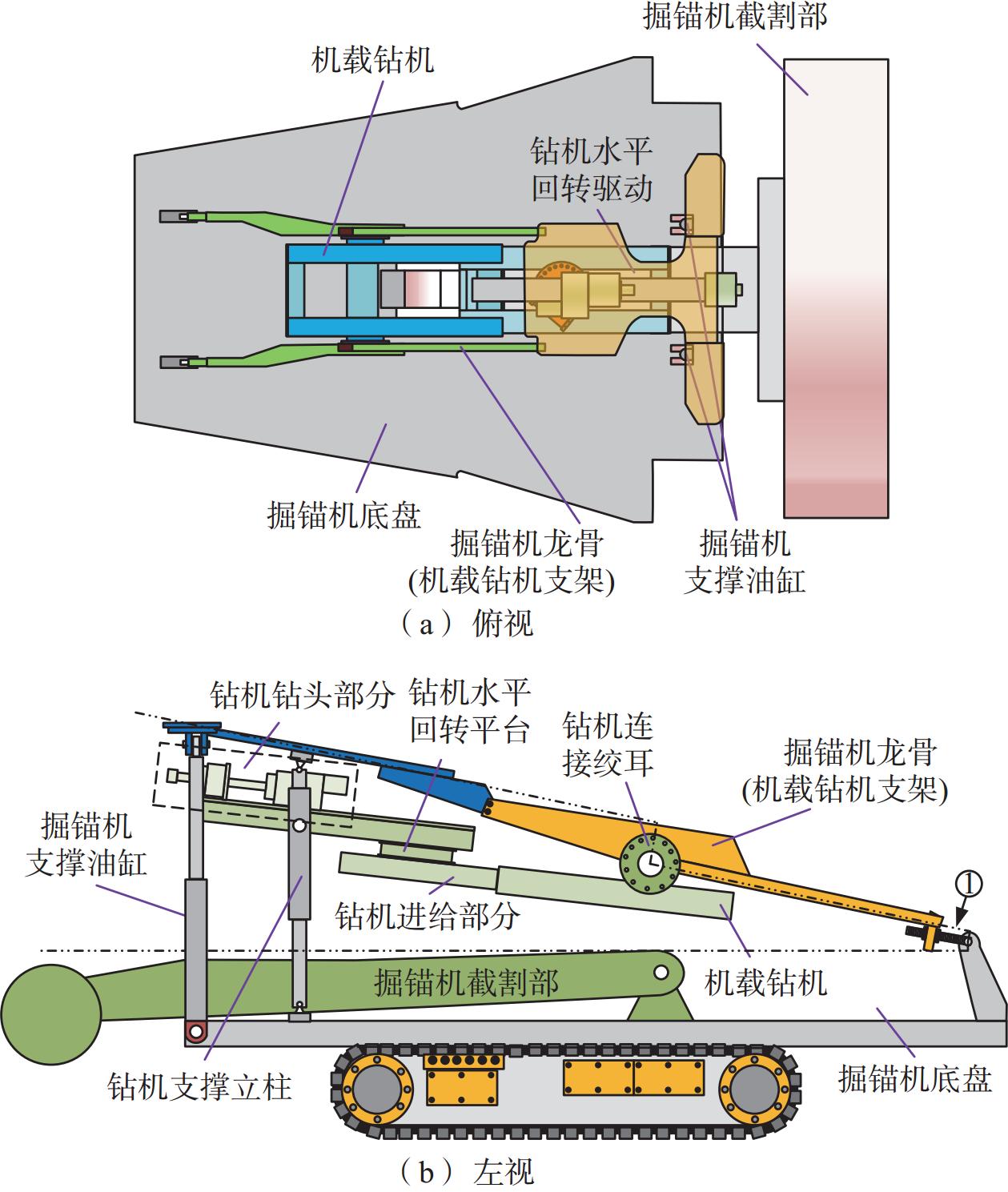
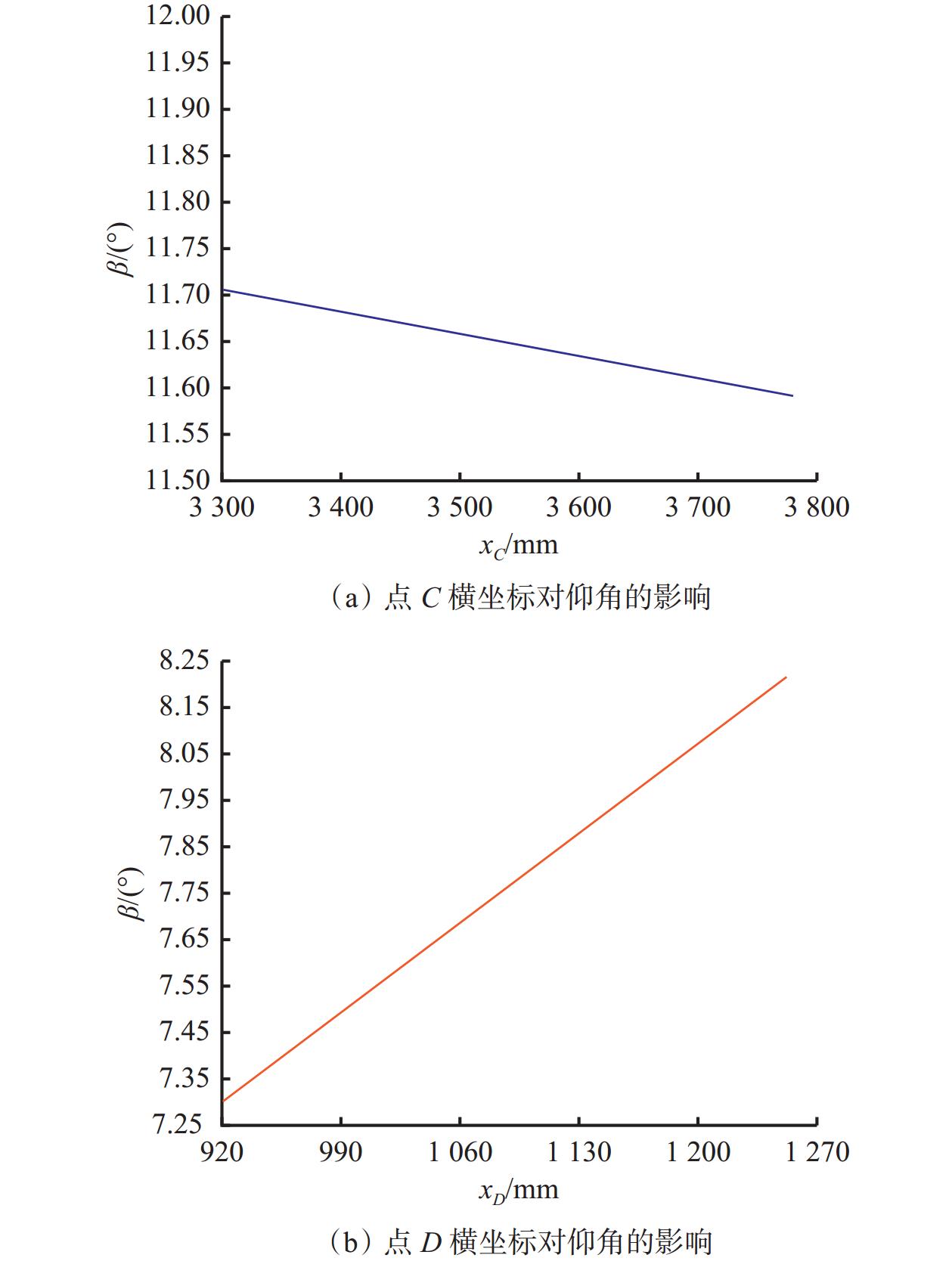
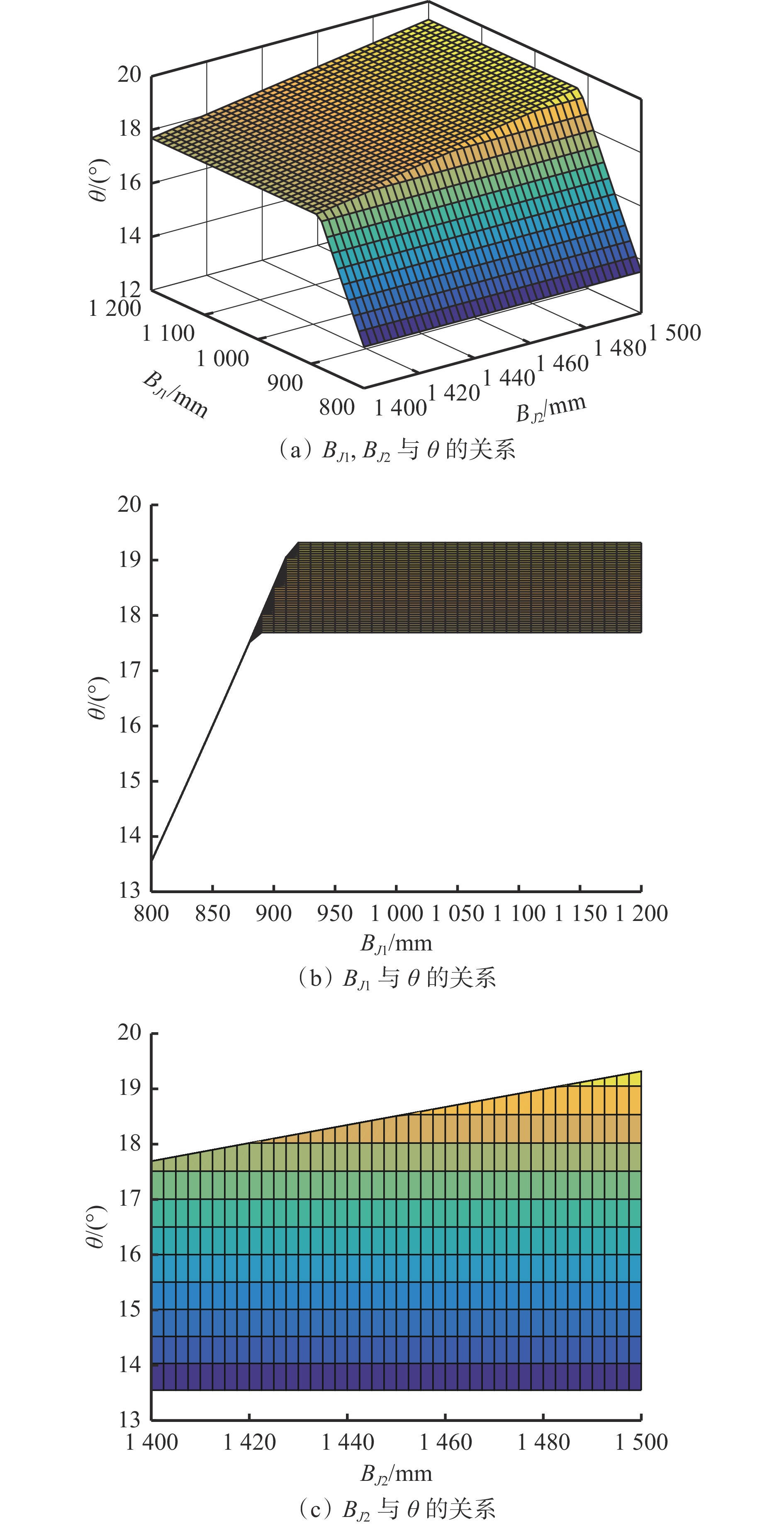
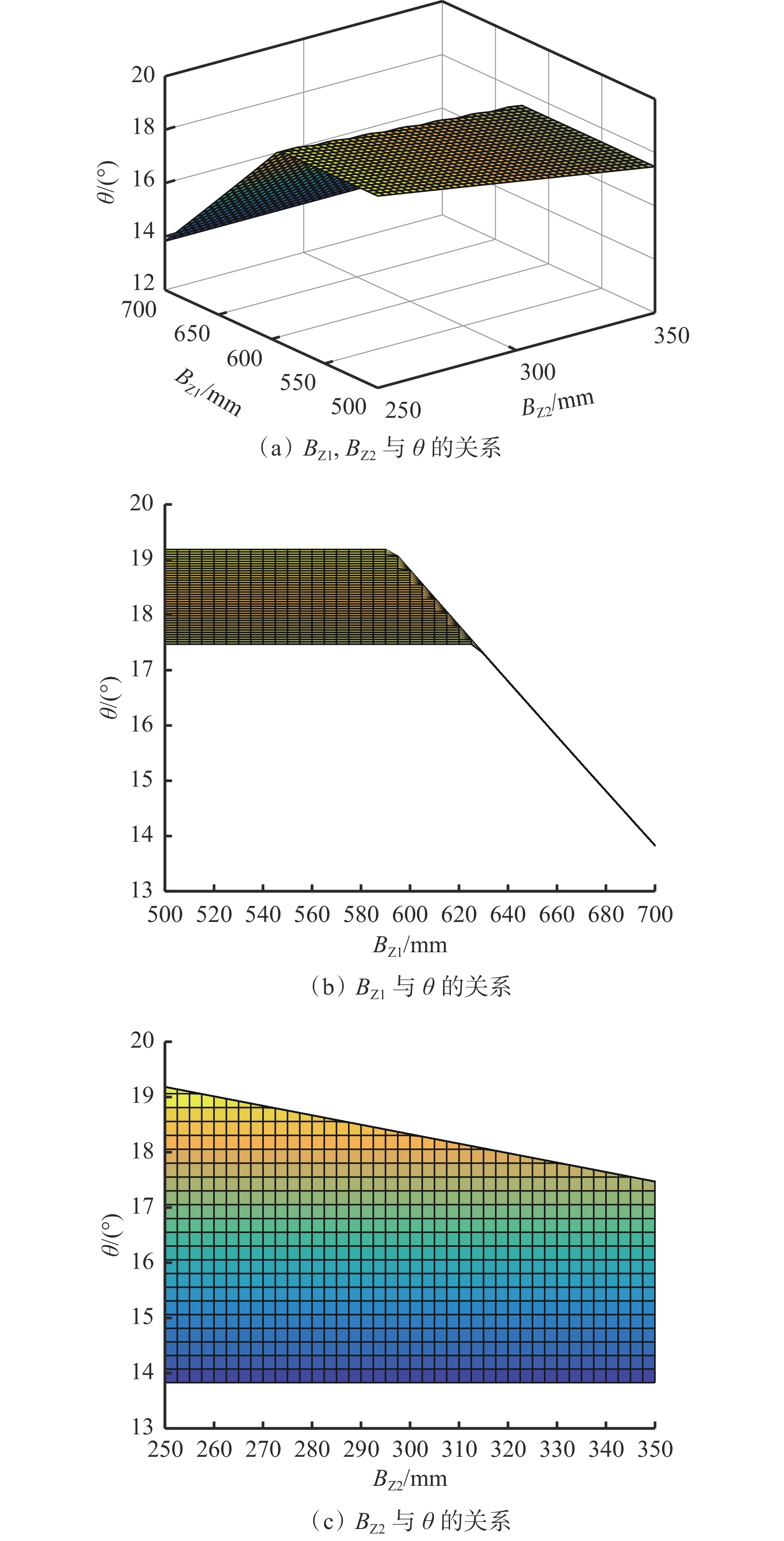
The deployment of the front drilling rig requires a significant amount of time before and after water exploration and drainage operations. Loading advanced drilling equipment on the anchor excavator can reduce equipment deployment time and improve drilling efficiency. At present, research on anchor excavator units that integrate excavation, anchoring, and exploration mostly focuses on the structural design of equipment and the design of hydraulic control systems. There is relatively little research on the interference features between different structures. The paper analyzes the interference situation during the attitude adjustment process of the airborne drilling rig. A mathematical model for the interference between the anchor excavator and the airborne drilling rig is established based on the geometric position relationship during the attitude adjustment. The formula for calculating the maximum rotation angle is derived when the anchor excavator interferes with the airborne drilling rig. The maximum angle of interference between the anchor excavator and the airborne drilling rig is taken as the indicator. The influence of various size parameters of the anchor excavator and airborne drilling rig on the maximum angle of the airborne drilling rig in various directions is studied. The results show the following points. ① The larger the inclination angle of the anchor excavator keel, the greater the pitch adjustment angle of the airborne drilling rig. By adjusting the inclination angle of anchor excavator keel, the adjustment range of the elevation angle during the operation of the water exploration drilling rig can be effectively changed. ② The variation of the keel height has little effect on the pitch angle. The variation of the keel height does not affect the variation of the pitch angle, but has a greater impact on the pitch angle, which is proportional. The increase in the length of the keel connecting the twisted ear to the tail of the keel increases the pitch angle, but the effect on the pitch angle is not significant. To change the elevation angle, the value of the keel height can be changed firstly. To change the depression angle, the value of the length of the keel connecting the hinge to the tail of the keel can be changed firstly. ③ When the spacing between the anchor excavator keel protection plates is larger, the maximum horizontal rotation angle of the airborne drilling rig is larger. When it increases to a certain extent, the maximum horizontal rotation angle is no longer affected by the increase in spacing between the anchor excavator keel protection plates. When the distance between the keel protection plates of the anchor excavator is greater than a certain value, the larger the center distance of the support oil cylinder of the anchor excavator, the greater the maximum horizontal rotation angle of the airborne drilling rig. The influence of the spacing between the keel protection plates of the anchor excavator on the maximum horizontal rotation angle of the airborne drilling rig is greater than the center distance of the support oil cylinder of the anchor excavator. ④ When the width of the rear end of the airborne drilling bit is small, it does not affect the maximum horizontal angle. When the width of the rear end of the airborne drilling bit increases to a certain value, the larger the width of the rear end of the airborne drilling bit, the smaller the maximum horizontal angle. When the width of the rear end of the airborne drilling bit is less than a certain value, the larger the width of the front end of the airborne drilling bit, the smaller the maximum horizontal angle. The example verification results show that increasing the inclination angle of the keel, the height of the keel connecting bolts, the height of the keel, and the length of the keel connecting ear to the tail of the keel, while reducing the height difference between the upper edge of the drill bit and the connecting ear of the drill frame, and the length of the keel upper protective plate, effectively increases the maximum pitch angle of the airborne drilling rig.
WU Di, FU Baoding, SUN Bo, et al. Analysis of attitude adjustment for airborne drilling rig of anchor excavator[J]. Journal of Mine Automation,2024,50(1):104-114. doi: 10.13272/j.issn.1671-251x.2023060016.