Abstract:
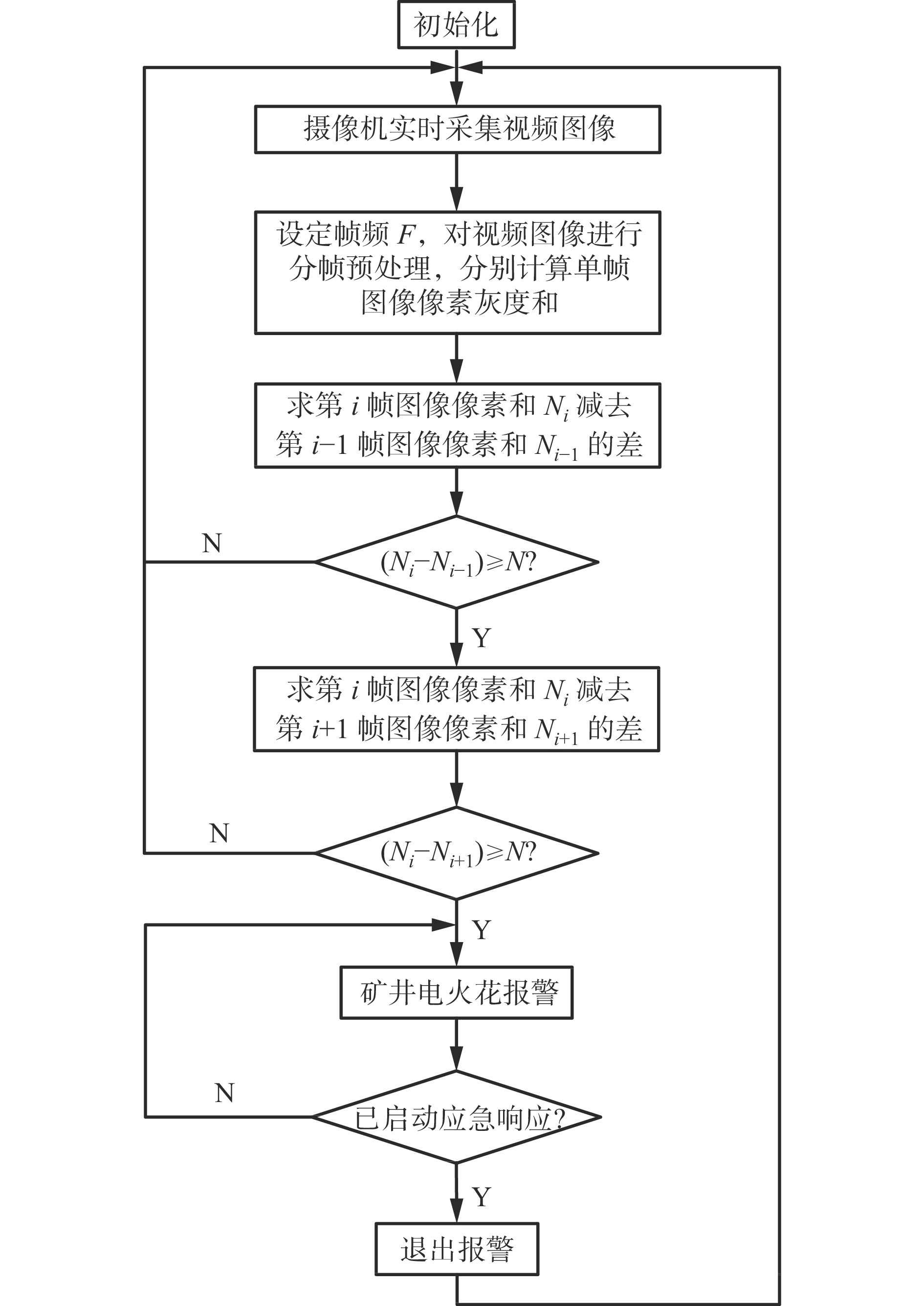
Early detection of mine electric sparks and alarm can prevent or reduce gas and coal dust explosions and mine fire accidents. There are no natural light sources such as sunlight, moonlight, and starlight underground. The main factor affecting the recognition of mine electric sparks is the mine light source. By adjusting the installation position and angle of the camera, the impact of fixed mine light sources on electric spark recognition can be avoided or reduced. But it cannot solve the impact of mobile mine light sources on electric spark recognition. The discharge cycle of electric sparks generated by different forms of circuits is different, but the discharge time of electric sparks is less than 4 ms. The minimum bright duration of the flash light source is 240 ms. Therefore, the features of the short emission time of electric sparks and longer exposure time of mine moving light sources to cameras can be utilized to eliminate the impact of mine moving light sources on camera exposure. The camera shoots at a high frame rate, and the electric spark image has a feature of 1 frame dark -1 frame bright -1 frame dark, that is, a "dark light dark" frame feature. The "bright" frames with sparks have a large sum of pixel grayscales in a single frame. The "dark" frames without sparks have a small sum of pixel grayscales in a single frame. The illumination of a moving light source on the camera is variable, going through a process of no light, light, and no light. In the absence of electric sparks, the camera also shoots at a high frame rate. The images of both moving constant bright light sources and moving flashing light sources do not exhibit the "dark bright dark" frame feature. Based on the unique "dark bright dark" frame feature of electric spark images, a mine electric spark recognition and alarm method based on the sum of adjacent frame pixel grayscale is proposed. The method collects monitoring area video images in real time. According to the set frame rate, the method preprocesses the video image into frames and calculates the pixel grayscale of a single frame image separately. If the difference between the current frame image pixel grayscale and the previous frame image pixel grayscale is less than the pre-set threshold, the method continues to collect the video image. Otherwise, the method calculates the difference between the current frame image pixel grayscale and the subsequent frame image pixel grayscale. If the difference is less than the pre-set threshold, the method continues to collect video images. Otherwise, the method issues a mine electric spark alarm signal. After the mine electric spark alarm, if the emergency response is not activated manually, the mine electric spark alarm will continue. Otherwise, the method exits the current alarm state and continues to collect video images. This method can effectively eliminate the interference of moving constant light sources and flashing light sources.
SUN Jiping, LI Xiaowei, WANG Jianye. Research on mine electric spark recognition and alarm method based on the sum of adjacent frame pixel grayscale of images[J]. Journal of Mine Automation,2023,49(7):1-5. doi: 10.13272/j.issn.1671-251x.18141.