Abstract:
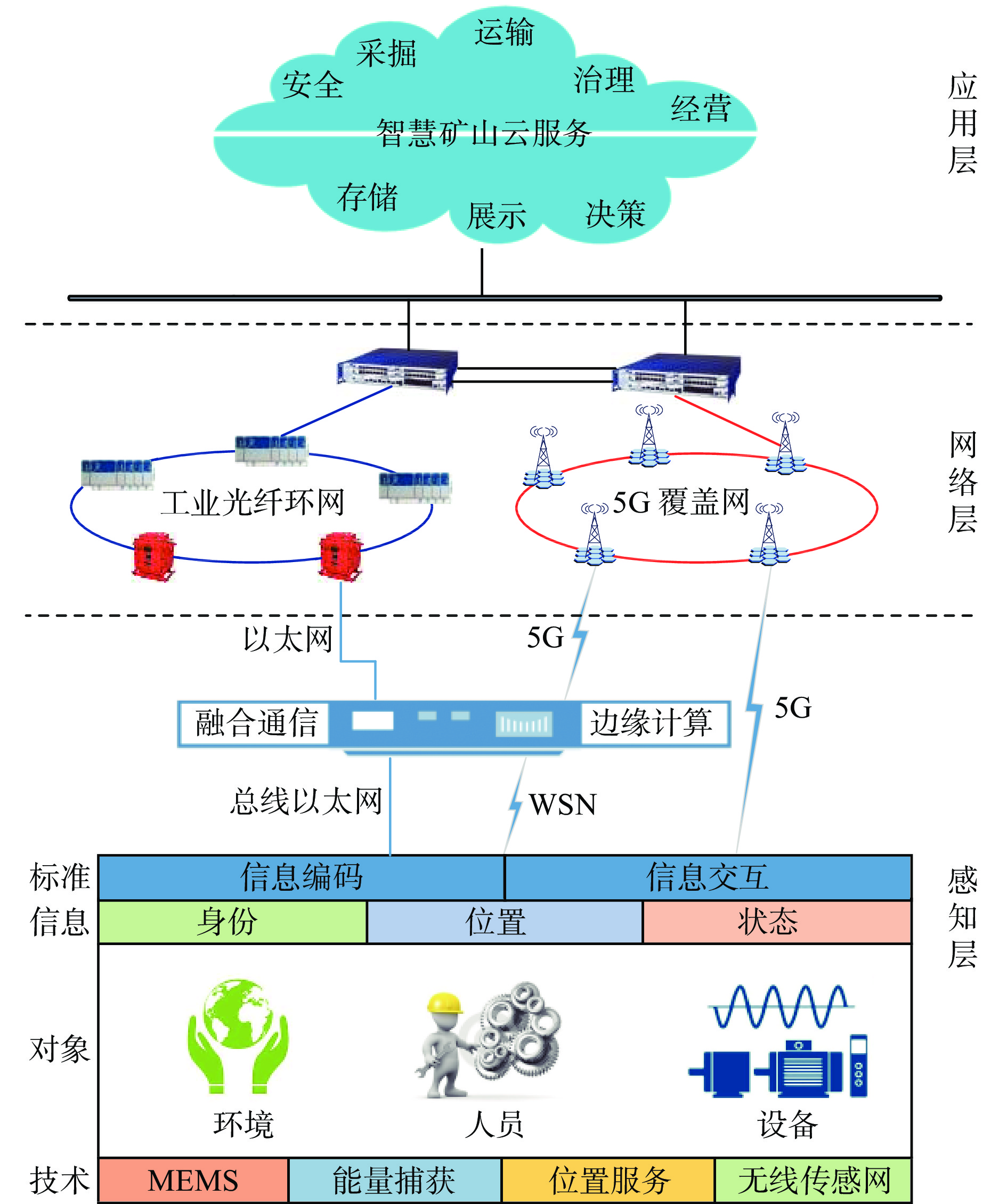
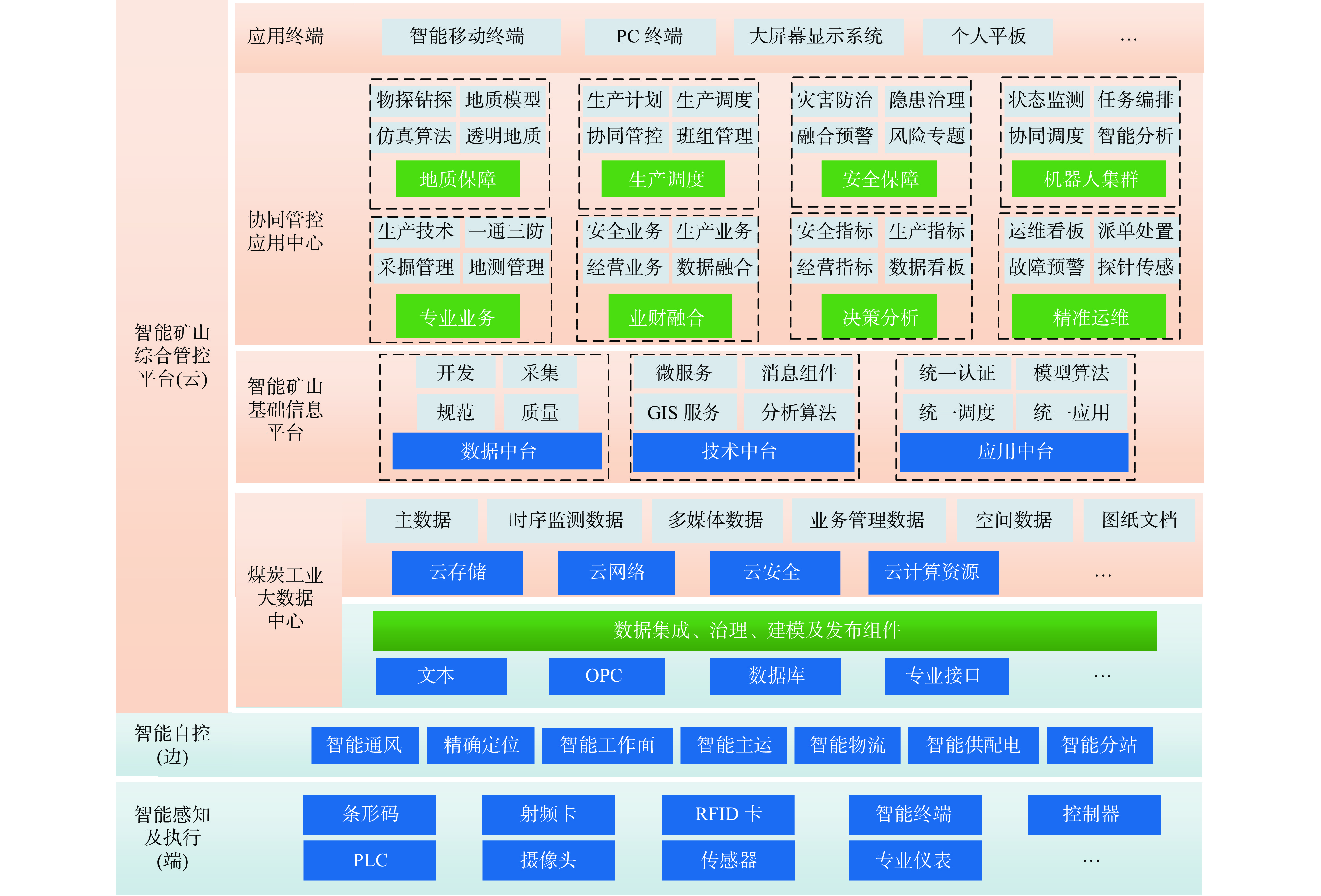
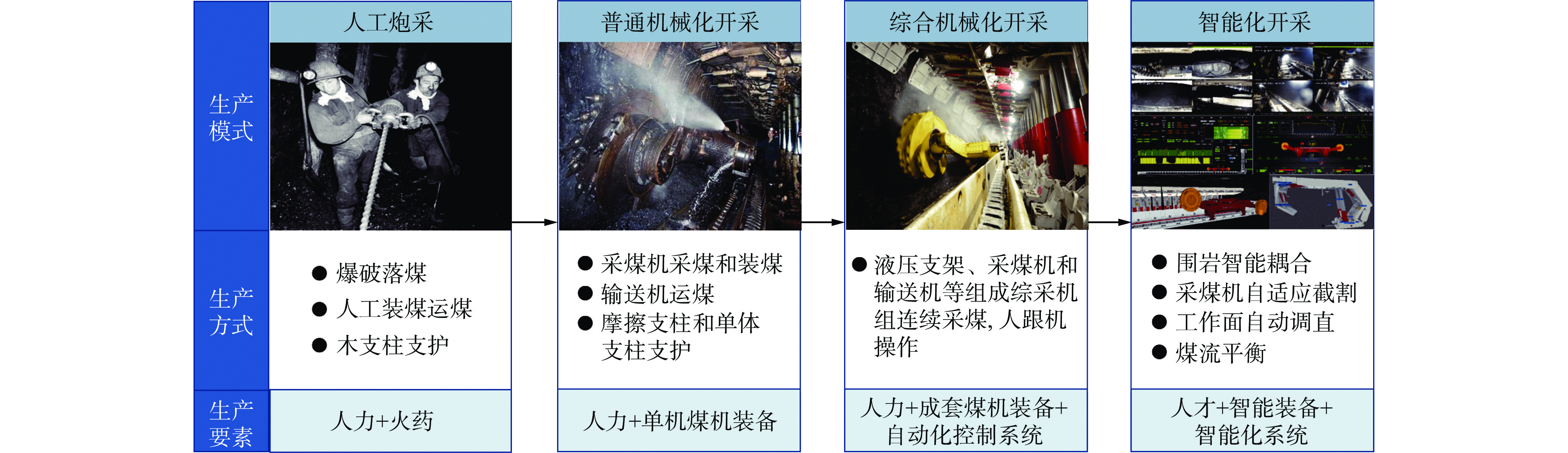
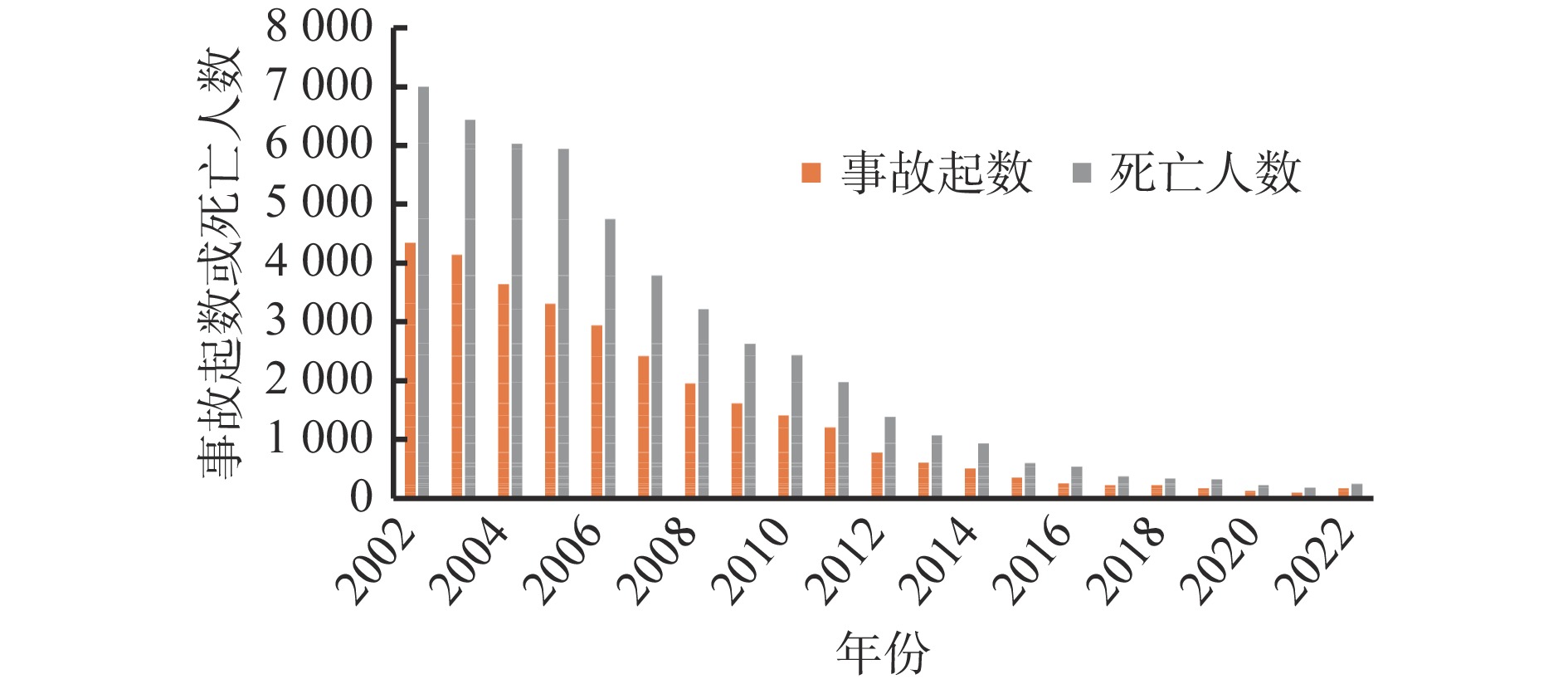
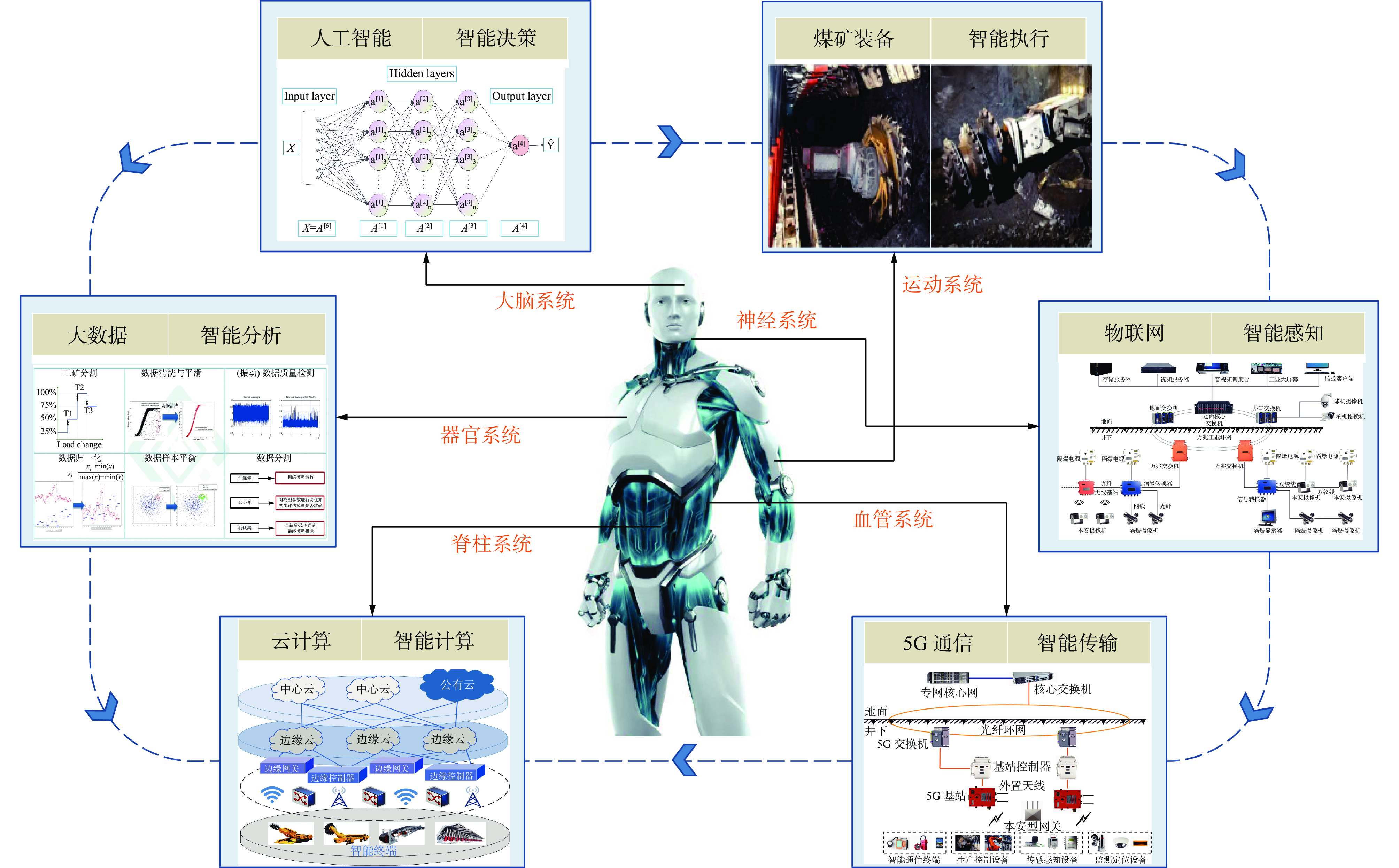
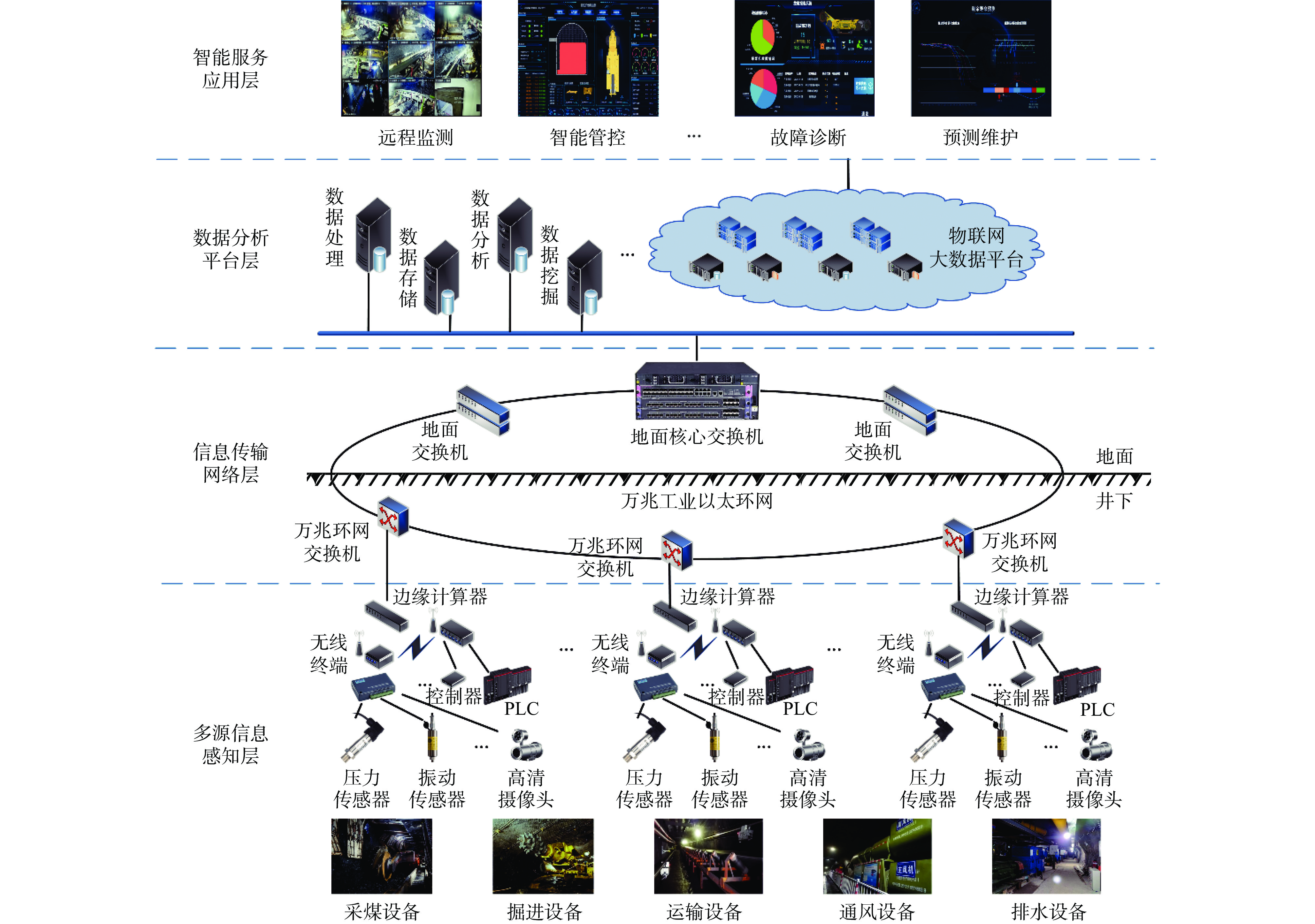
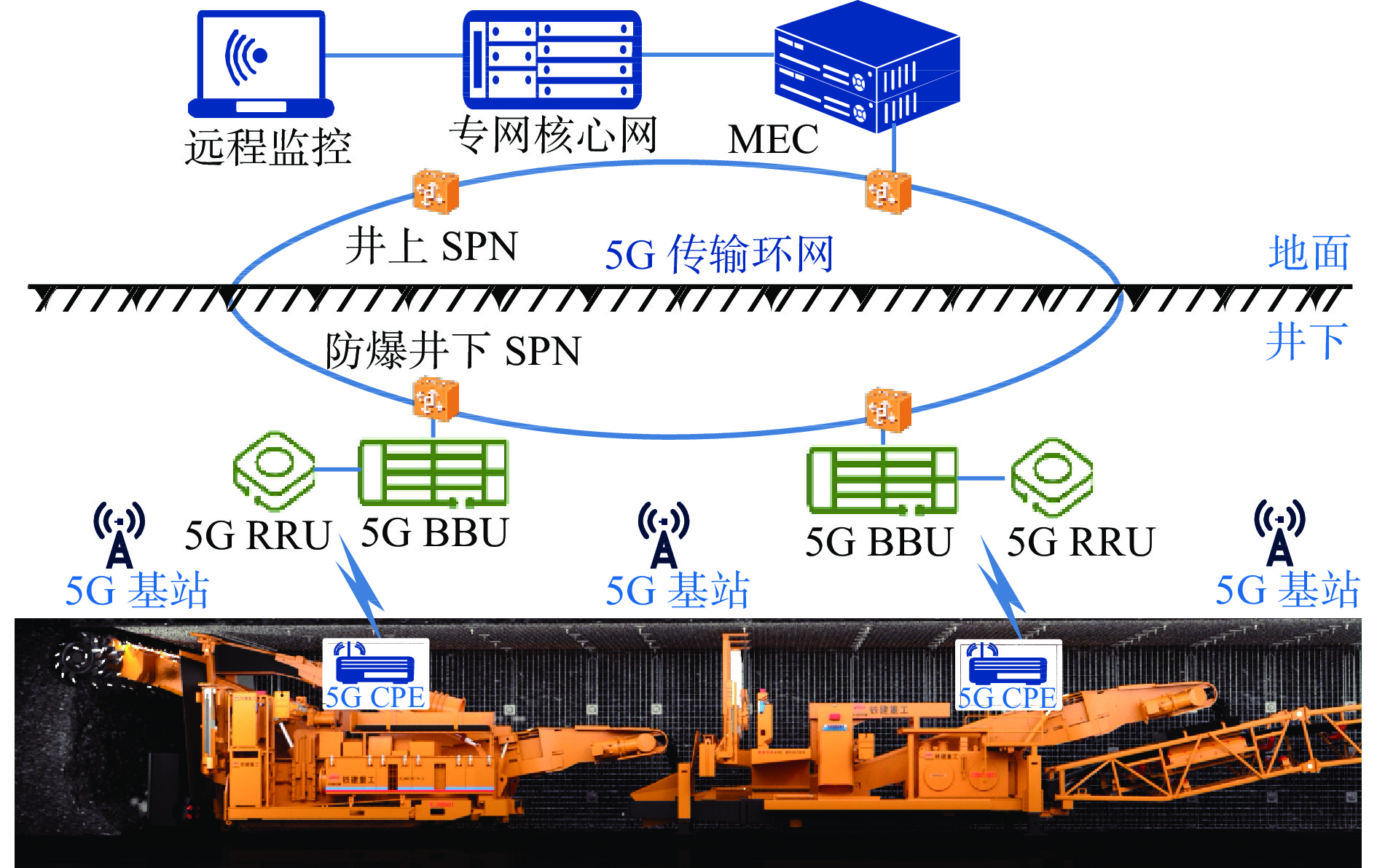
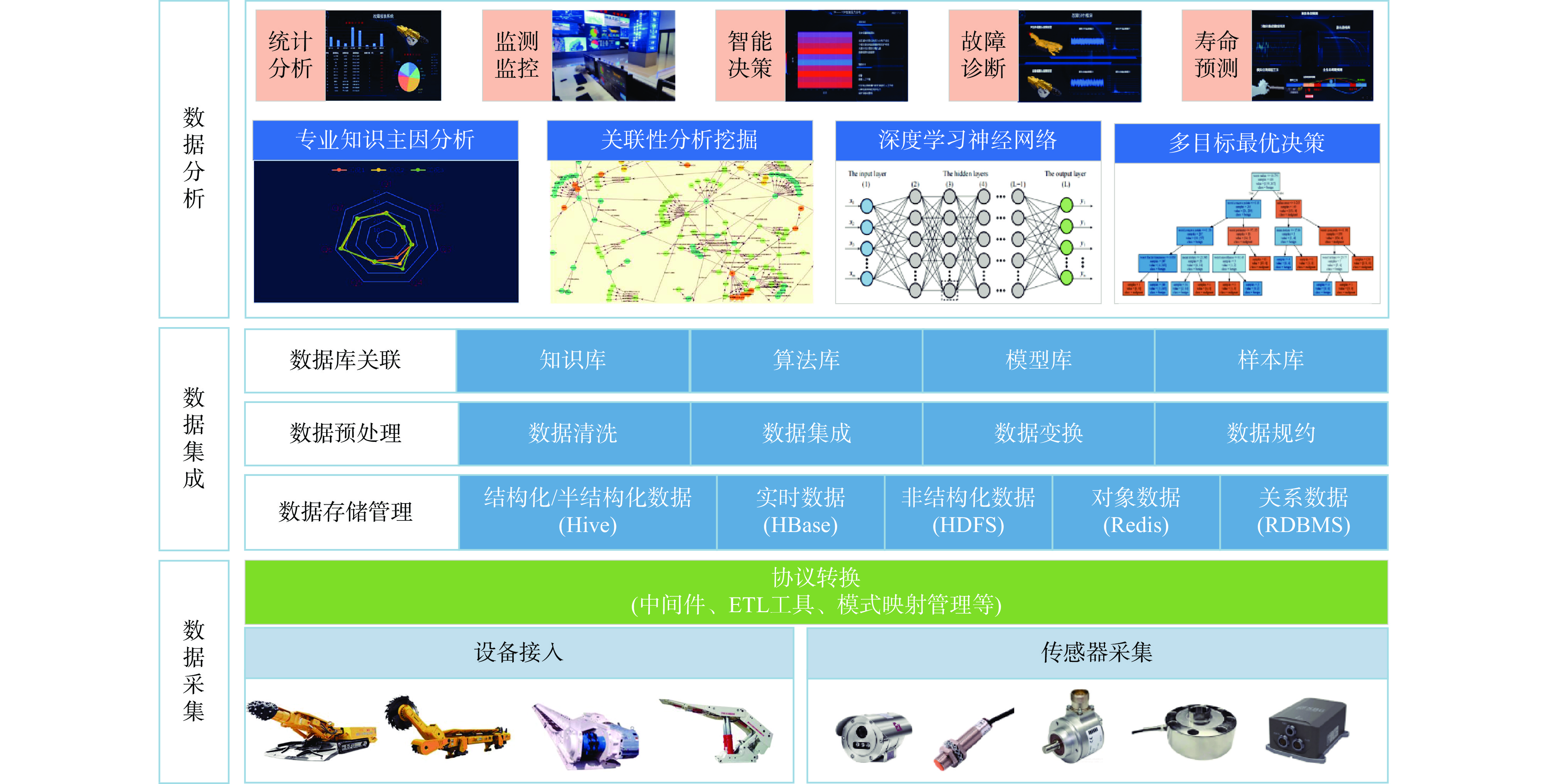
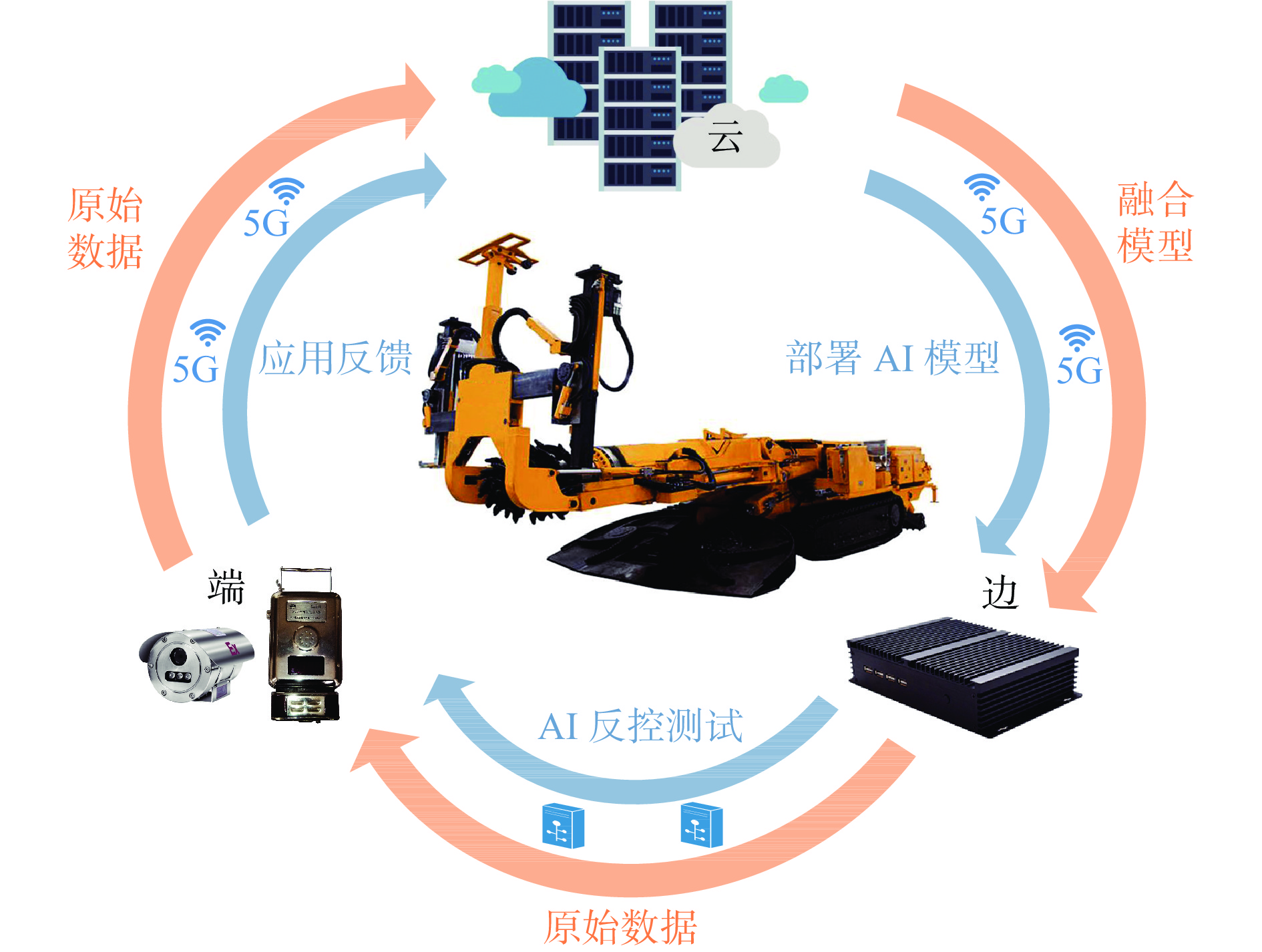
Currently, the intelligent construction of coal mines is in a transitional exploration period from primary to intermediate and advanced intelligence. The independent innovation capability of existing intelligent equipment still needs to be strengthened. The core technologies are bottleneck problems. The reliability problem under complex underground storage conditions is prominent. It is of great significance to use the new generation of information technology to promote the digital transformation and upgrading of coal mine equipment, and to promote safe, efficient, and green coal mining through digitization and intelligence. This paper reviews the evolution process of intelligent development of coal mining technology and equipment in China. This paper analyzes the production characteristics of each stage of coal mining. It is considered that the coal mine intelligence has completely changed the coal production mode. The production factors are mainly intelligent equipment, intelligent systems, and compound technical talents. They have essentially improved the level of safe and efficient production of coal mines, and helped the coal mines to reduce personnel, increase safety and improve efficiency. Among them, intelligent coal mine equipment is the core element of coal mine intelligence. Considering the demand for the digital and intelligent transformation and development of future coal mine equipment, we have explored the path of integrating the new generation of information technology and coal mine equipment. It uses equipment as an intelligent carrier. It endows the equipment with humanized intelligent capabilities such as intelligent perception and analysis, intelligent judgment and reasoning, intelligent decision-making and control, intelligent diagnosis and learning through the new generation of information technology. The system architecture of the Internet of things, 5G, big data, cloud computing, and artificial intelligence technology enabling intelligent perception, intelligent transmission, intelligent analysis, intelligent computing and intelligent decision-making of coal mine equipment has been constructed. The paper analyzes the theoretical, technical, and talent challenges in the development of digital intelligence in coal mining equipment. The paper proposes suggestions for the development of digital intelligence in coal mining equipment. Consolidating the foundation is the priority. It is necessary to build a top-level design theoretical system for intelligent coal mining equipment, strengthen key core technology research, accelerate the construction of new infrastructure, and consolidate the foundation of intelligent coal mining development. The intelligent technology for coal mining equipment and special application scenarios in coal mines develop in collaboration and coupling. It is suggested to meet the on-site needs of coal mines, form the intelligent technology for coal mine specific scenarios, and explore innovative models of equipment digital intelligence integration. The intelligent technology and green mining technology integrate and develop. It is suggested to create digital, intelligent, and green equipment. It is suggested to develop new models of intelligent, efficient, and low-carbon coal mining, and promote energy conservation and consumption reduction in coal production. It is suggested to establish a sound system for cultivating intelligent talents in coal mines, cultivate interdisciplinary and composite talents, and enhance talent reserves for the construction of intelligent coal mines.
JIN Zhixin, YAN Zhirui, WANG Hongwei, et al. The new generation of information technology empowers the digital and intelligent transformation and upgrading of coal mining equipment[J]. Journal of Mine Automation,2023,49(6):19-31. doi: 10.13272/j.issn.1671-251x.18123.