Abstract:
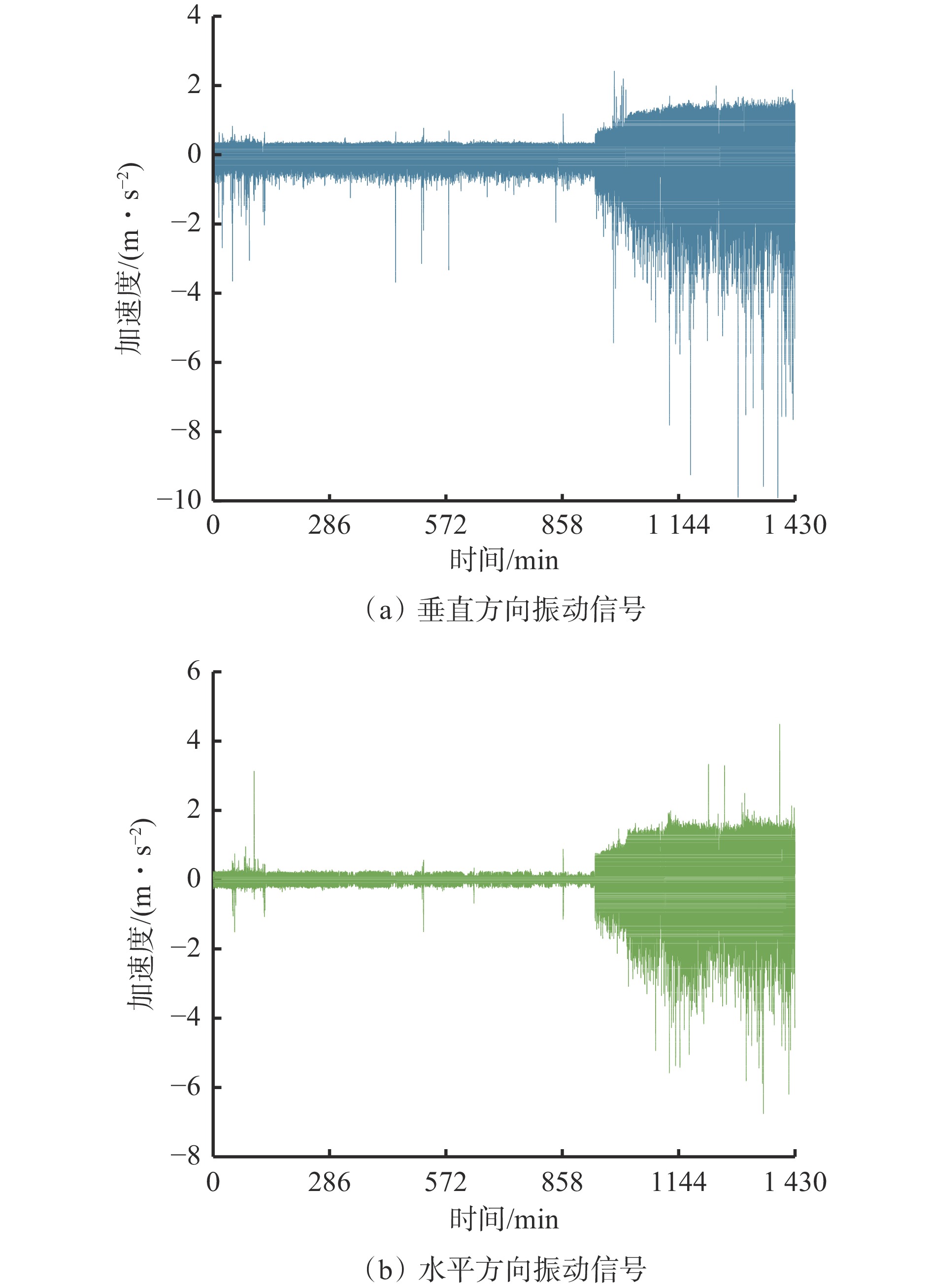
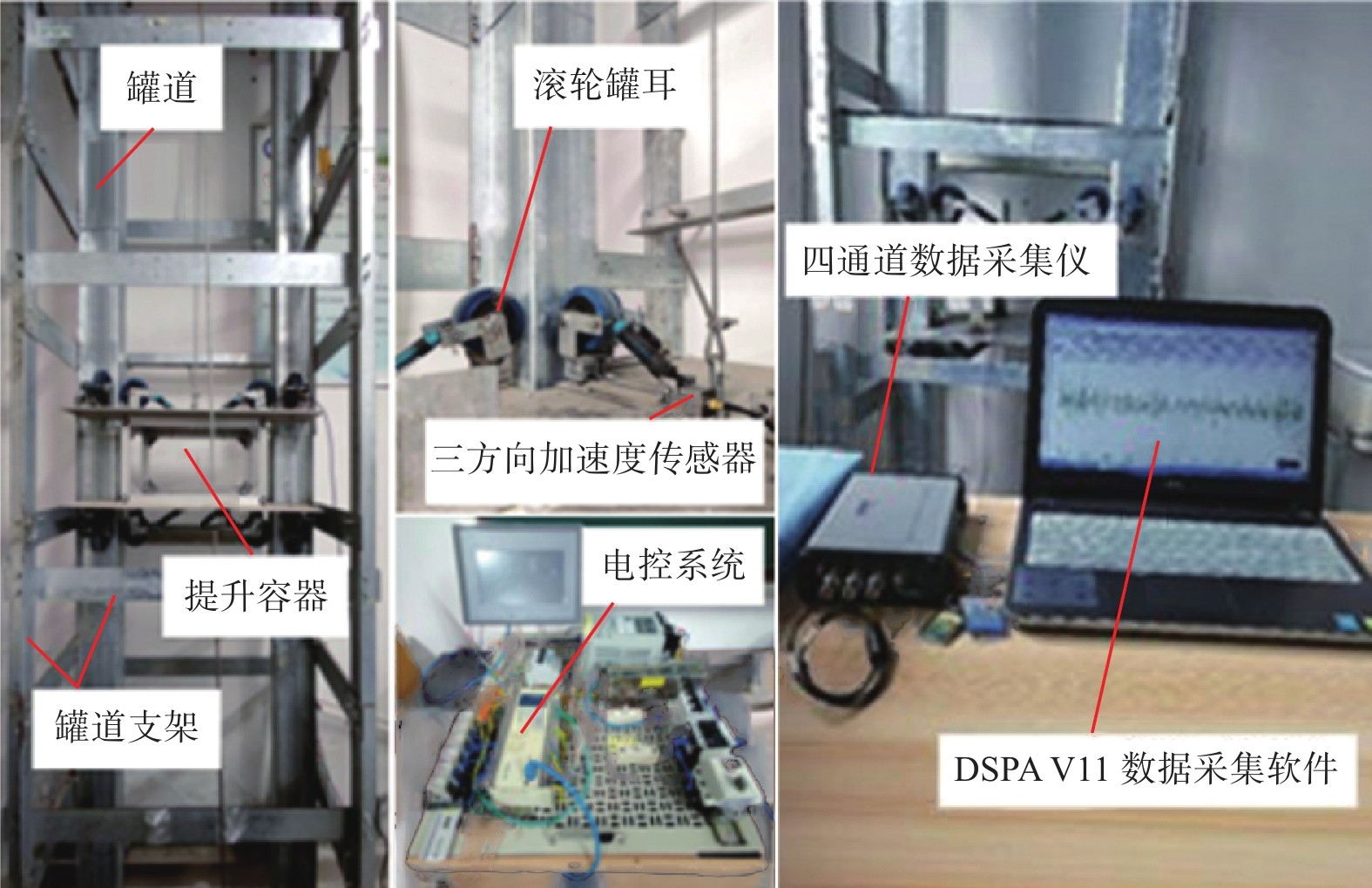
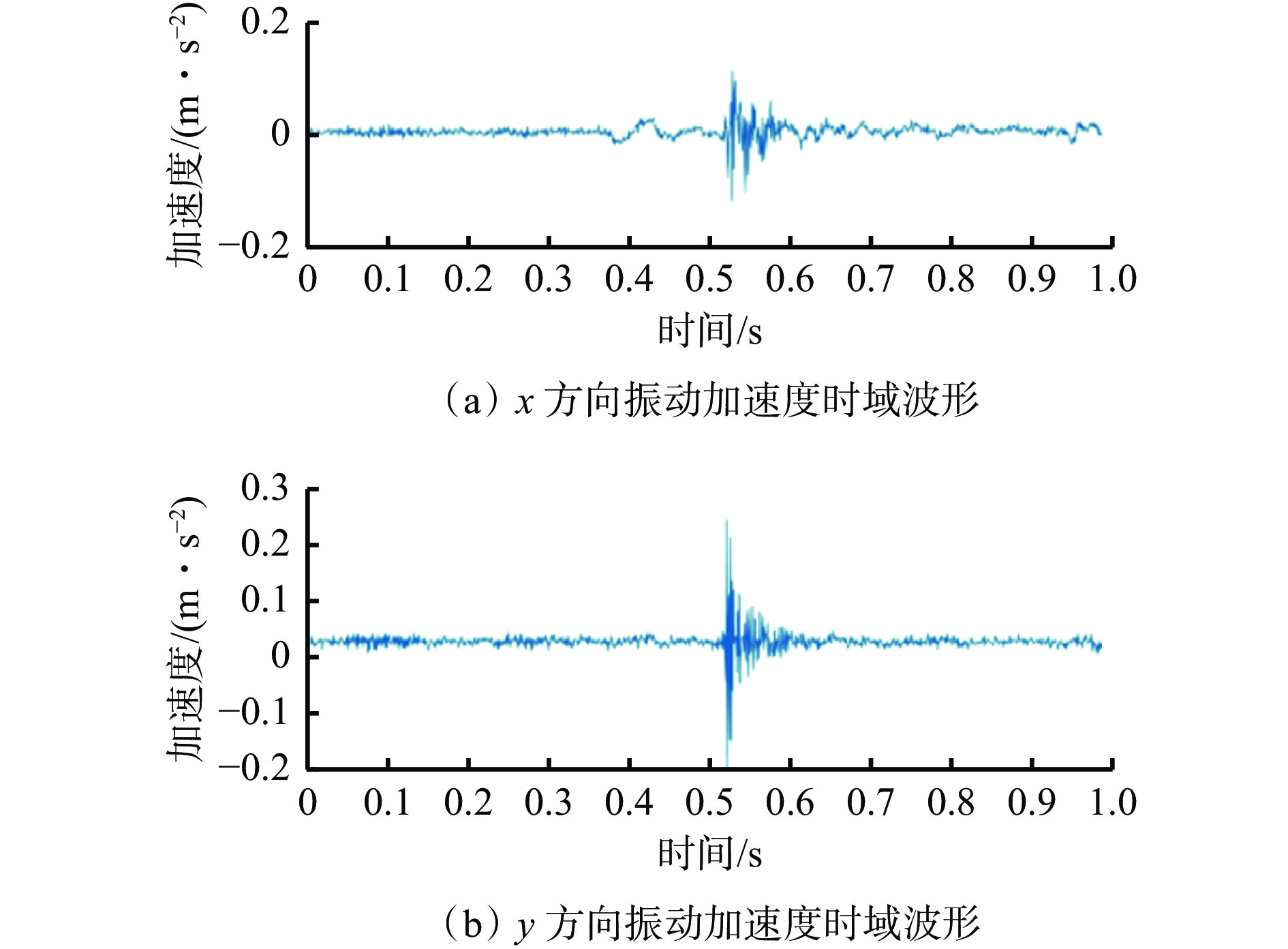
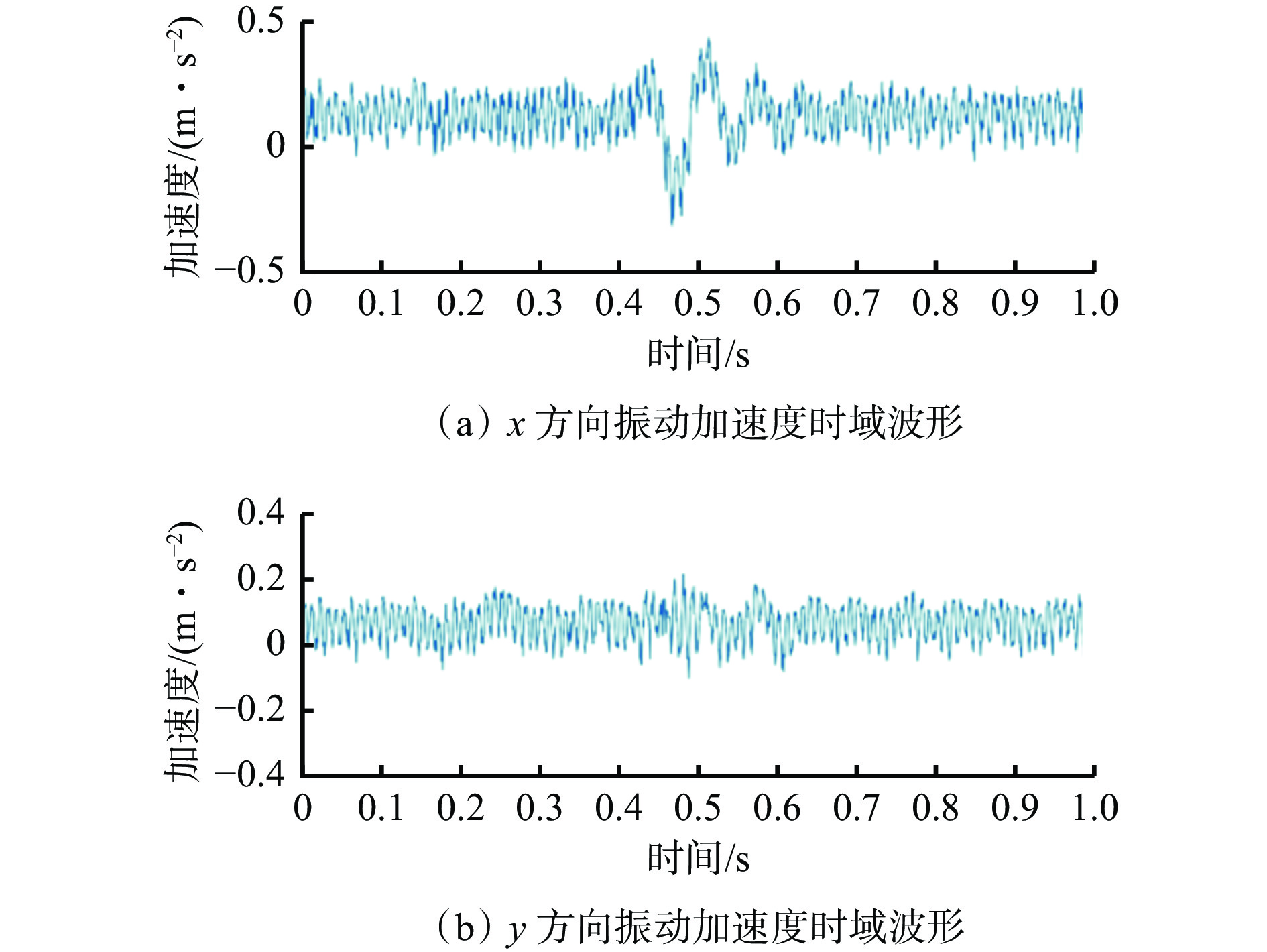
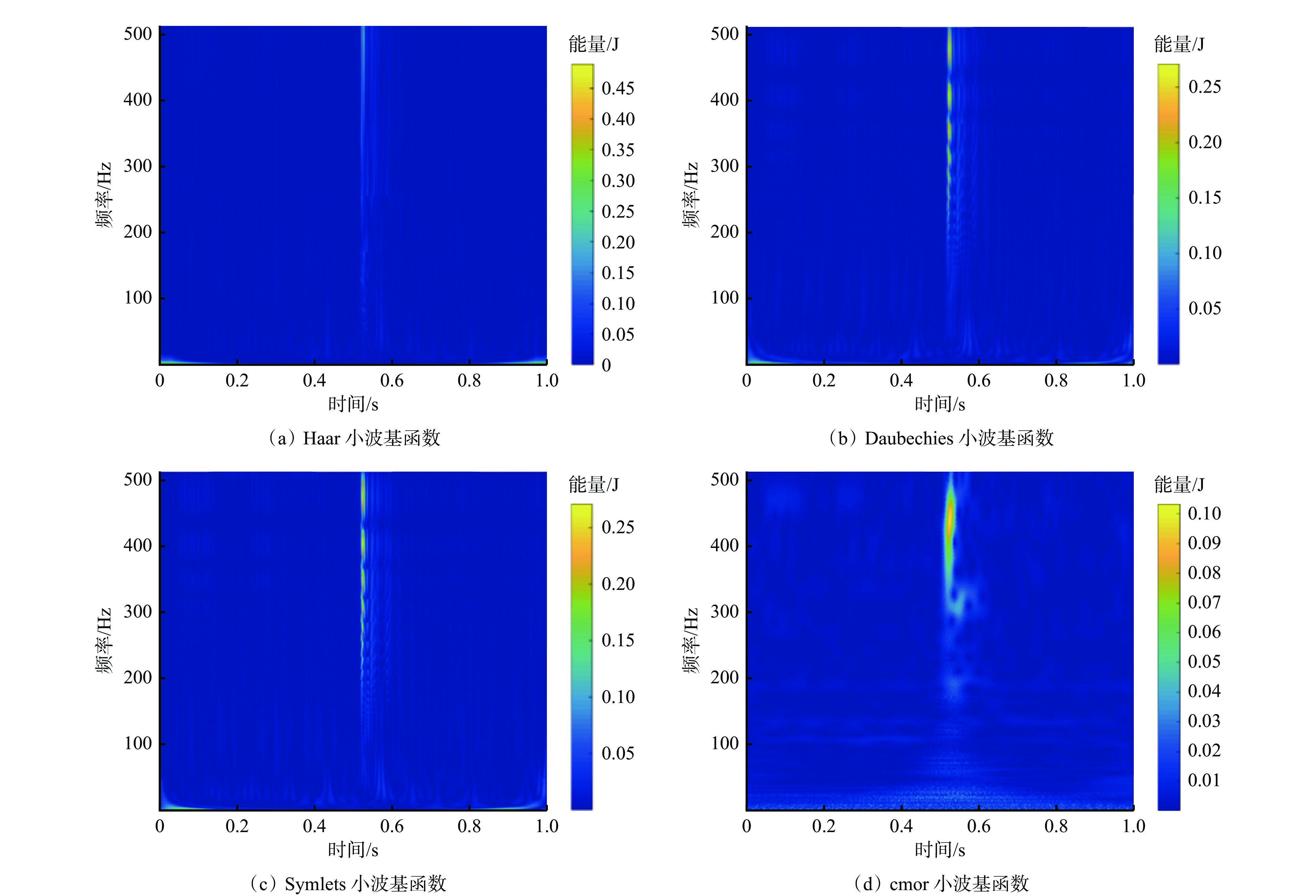
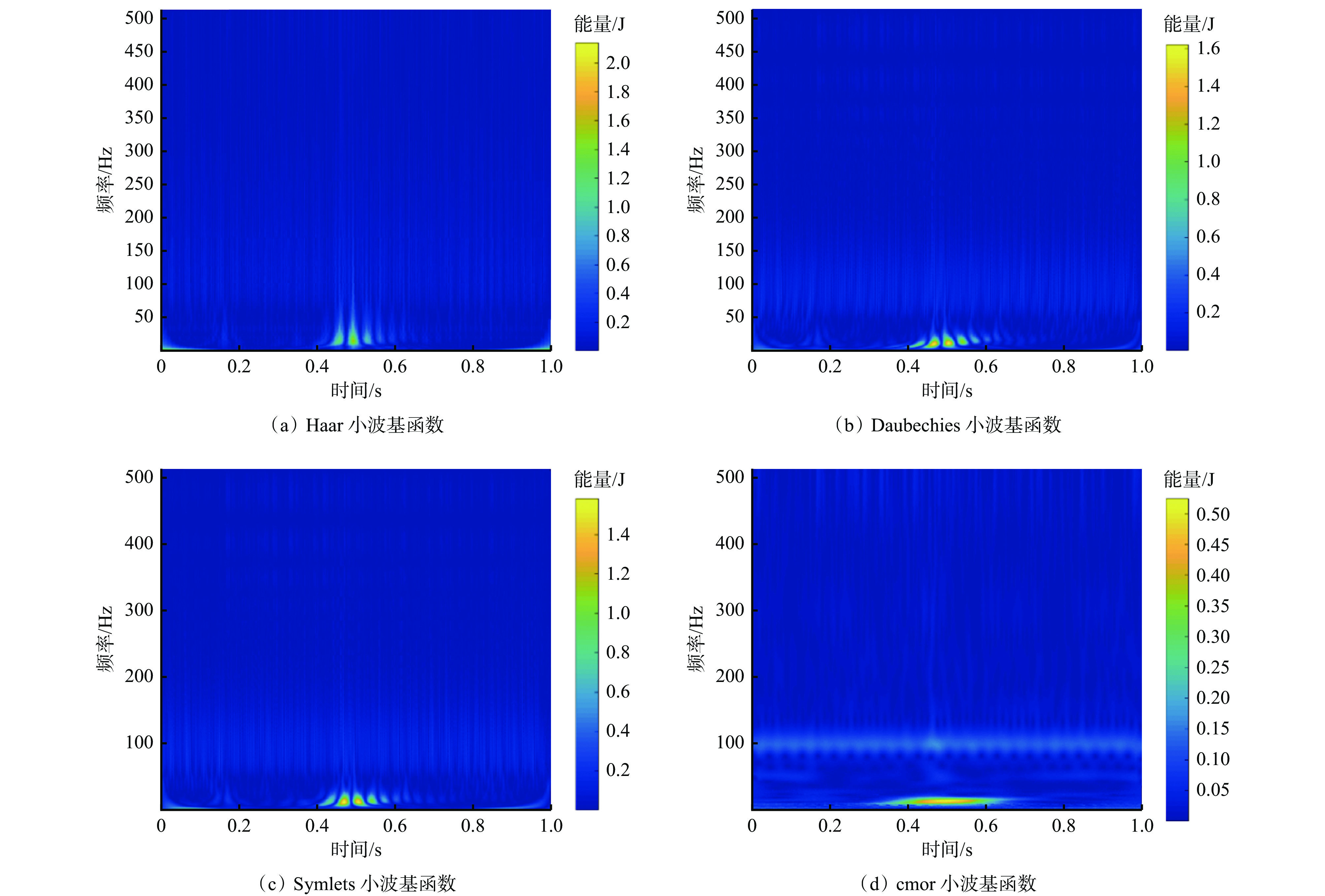
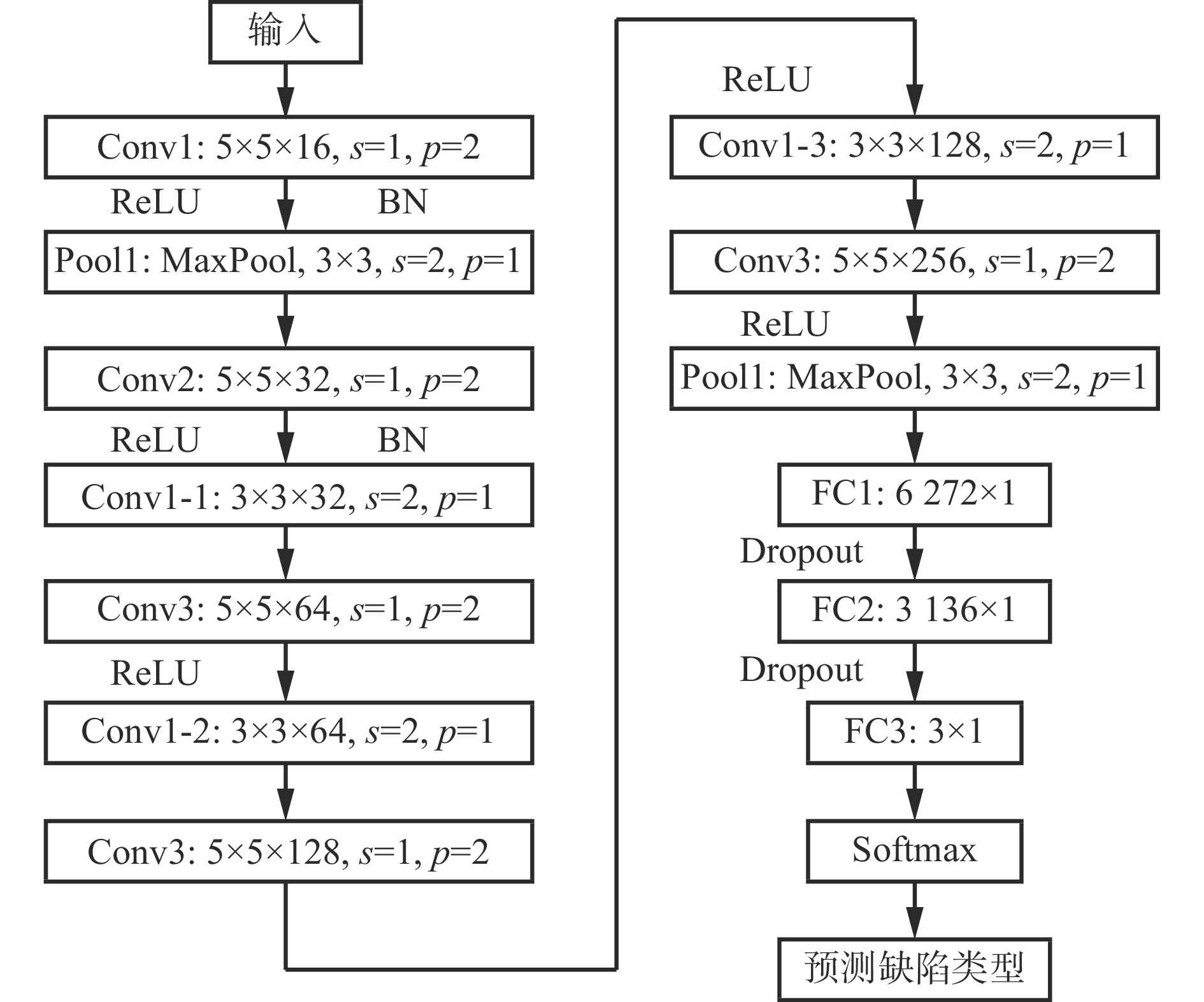
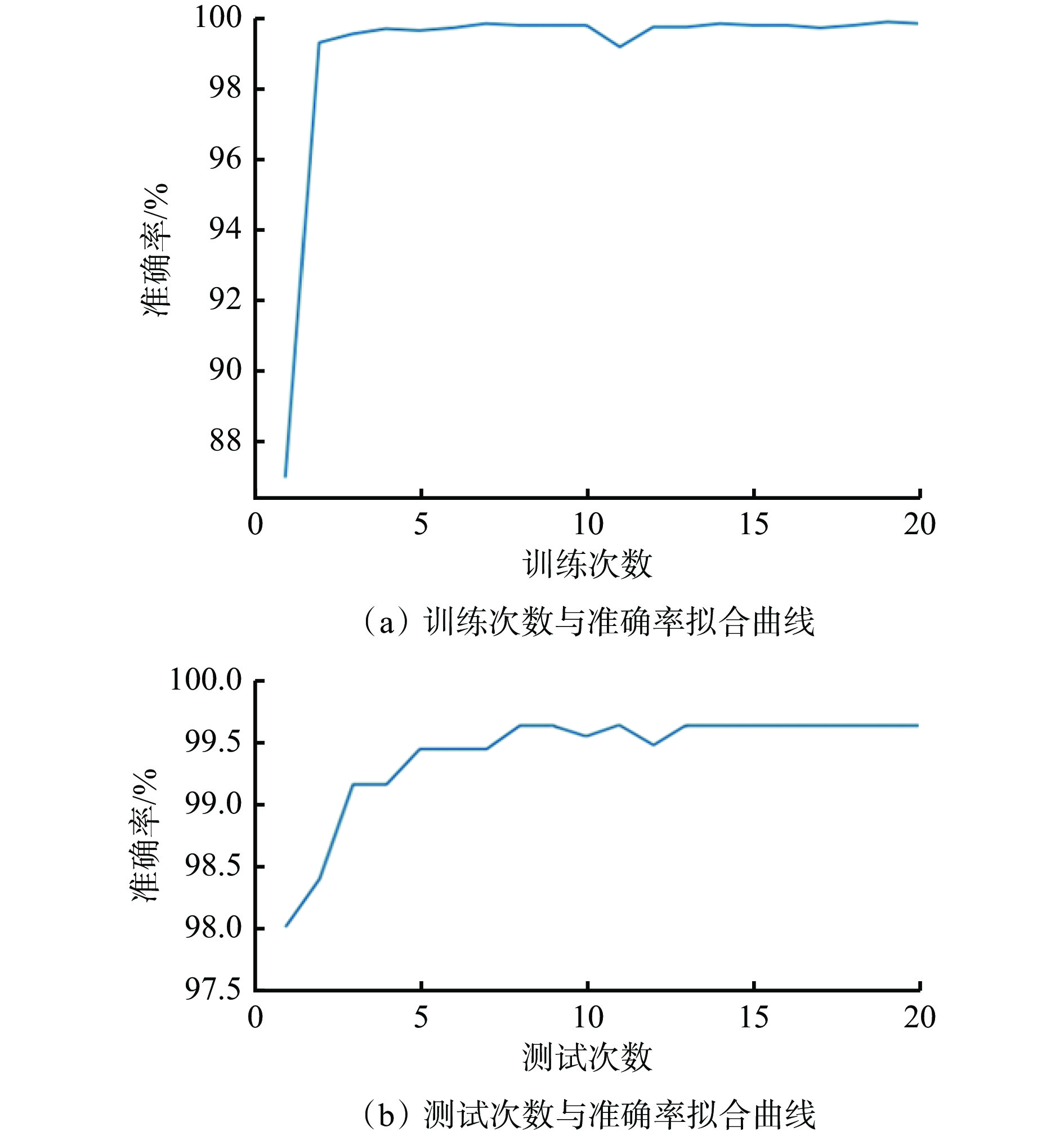
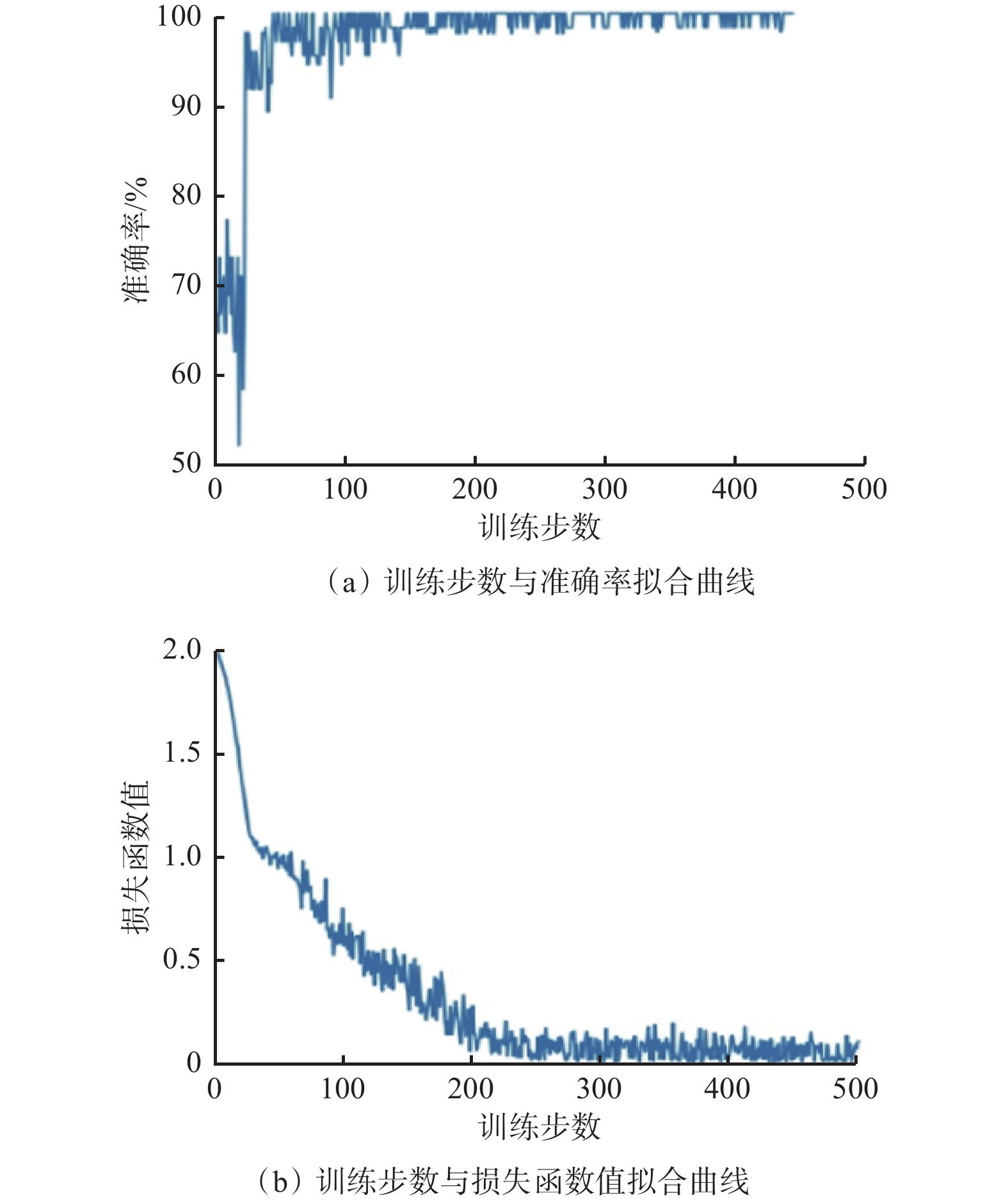
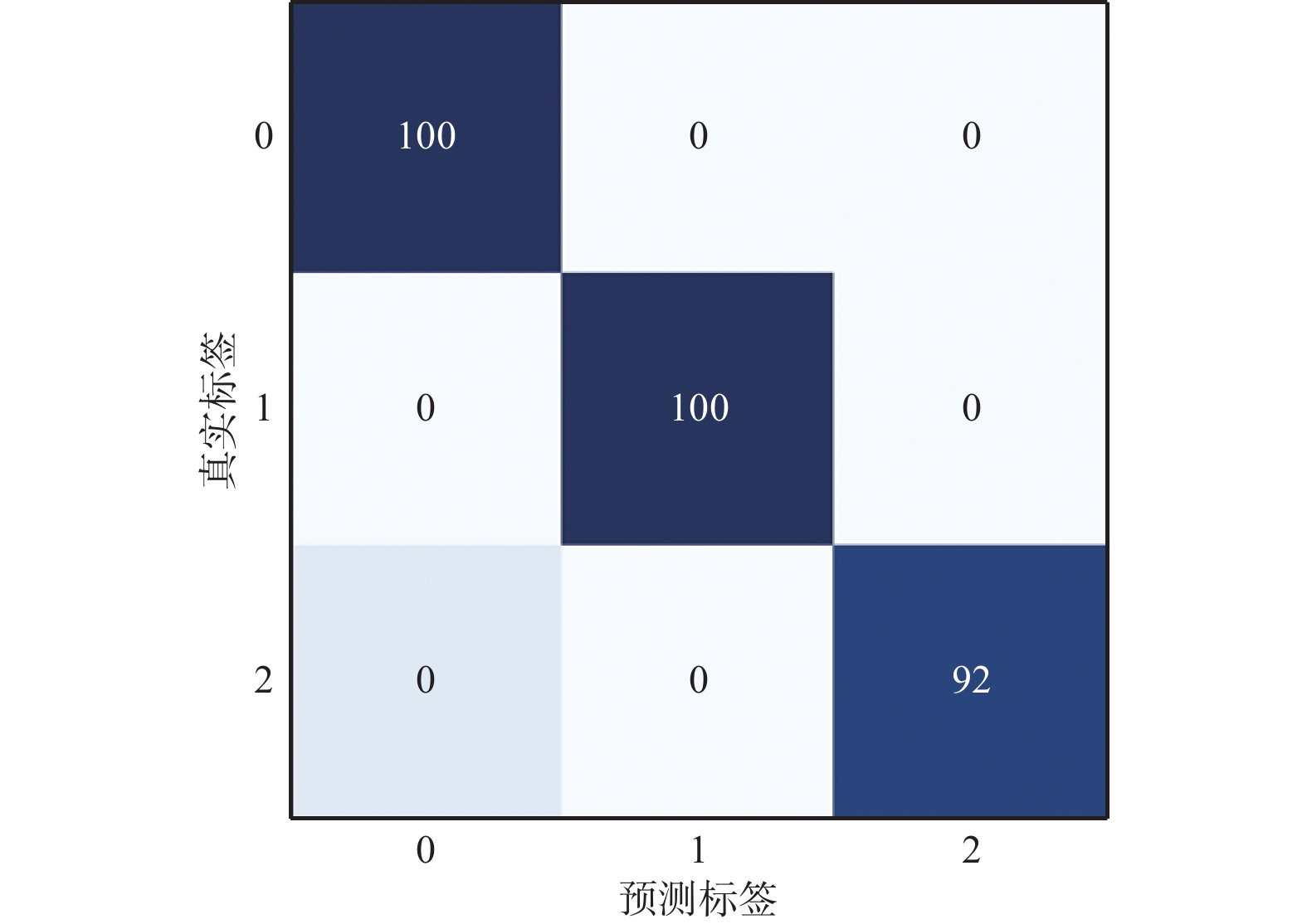
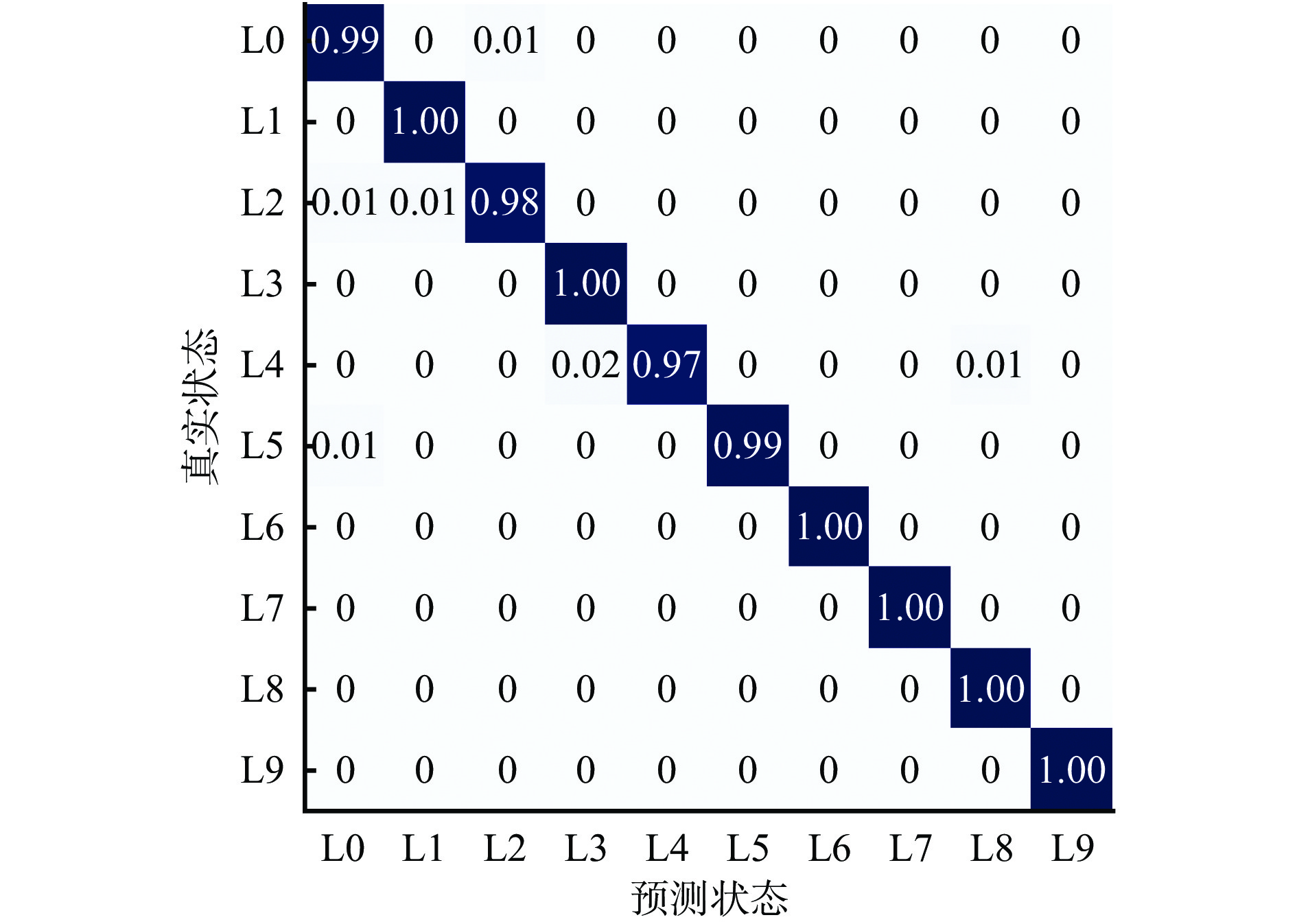
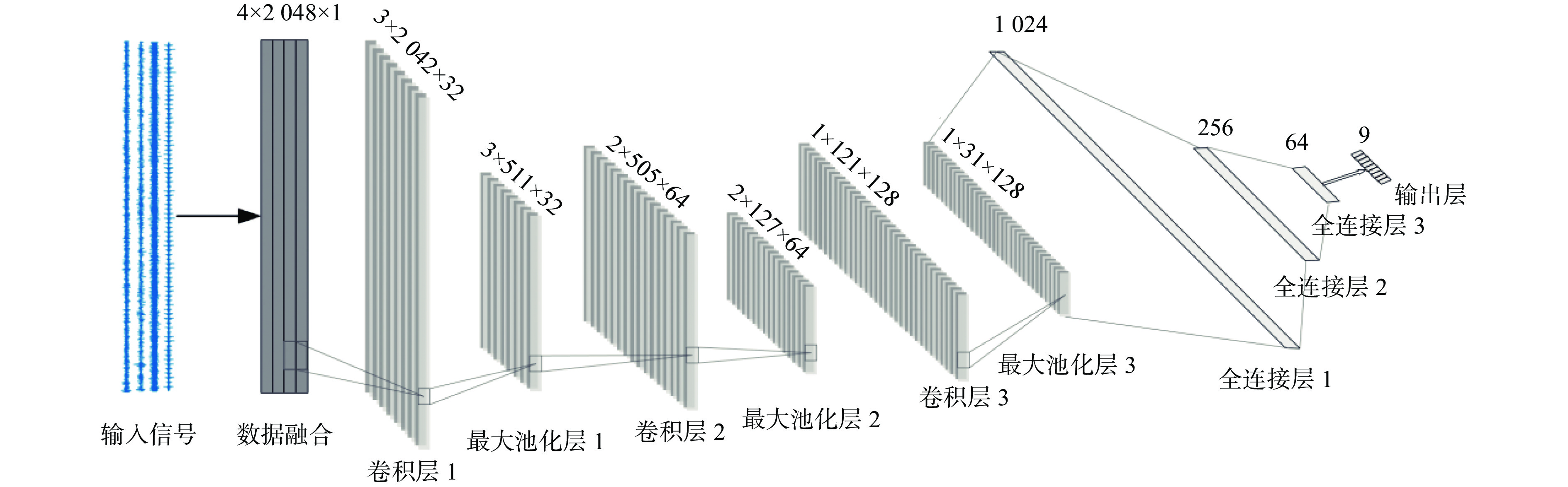
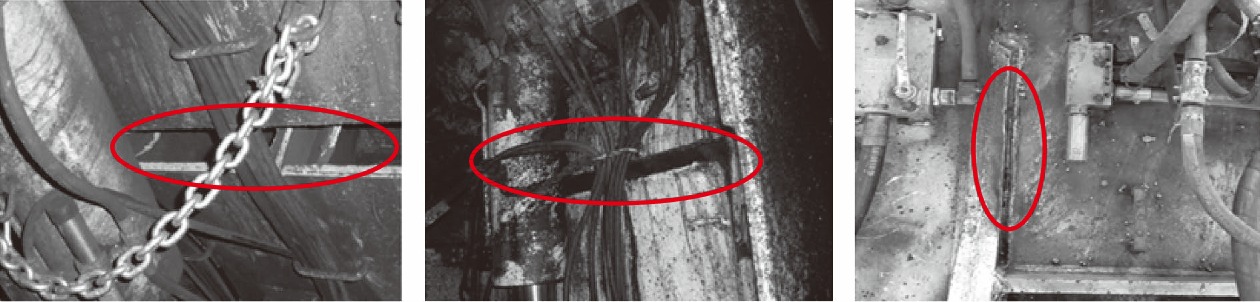
Some of the existing fault diagnosis methods for rigid guide are only suitable for small sample data sets. Although some methods are suitable for large sample data sets, they ignore the multi-condition background in the actual working environment. The method of rigid guide fault diagnosis based on the convolutional neural network has the problems of huge data and computation, and easy to produce over-fitting. In order to solve these problems, a fault diagnosis method of rigid guide based on wavelet transform and improved convolutional neural network is proposed. Firstly, two kinds of defects, dislocation and gap, are set in the rigid cage guide. The vibration acceleration signals of the hoisting container under multiple working conditions are collected. Secondly, the collected vibration acceleration signals are converted into two-dimensional time-frequency images by wavelet transform. The time and frequency resolution of the two-dimensional time-frequency images processed by the Complex Morlet wavelet basis function is determined to be the best by trial and error method. Thirdly, the structure of the convolutional neural network model is adjusted. The first pooling layer and the fifth pooling layer are reserved. The second pool layer, the third pooling layer and the fourth pooling layer are replaced by small-scale convolutional layers to prevent the over-fitting phenomenon. Finally, the two-dimensional time-frequency image is input into the improved convolutional neural network model. The experimental results show the following points. ① After training, the average accuracy of the improved model is about 99% on the training set and 99.5% on the test set. ② When the training data reaches 200 steps, the accuracy of the improved model is more than 99%, and the loss function of the improved model approaches 0. These results show that the improved model has good convergence performance, and the generalization of the model is enhanced. The inhibition effect on over-fitting in the learning process is obvious. ③ On the confusion matrix of the validation set, the identification rate of gap defect and dislocation defects is 100%. The identification rate of no defect is 92%, and 8% of the defect are mistakenly identified as gap defects. ④ Compared with EMD-SVD-SVM, wavelet packet-SVM, EMD-SVD-BP neural network and wavelet packet-BP neural network, the accuracy of rigid guide fault diagnosis method based on wavelet transform and the improved convolutional neural network reaches 99%.
DU Fei, MA Tianbing, HU Weikang, et al. Fault diagnosis of rigid guide based on wavelet transform and improved convolutional neural network[J]. Journal of Mine Automation,2022,48(9):42-48, 62. doi: 10.13272/j.issn.1671-251x.17964.