

A point cloud denoising method for unstructured roadways based on regional growth
-
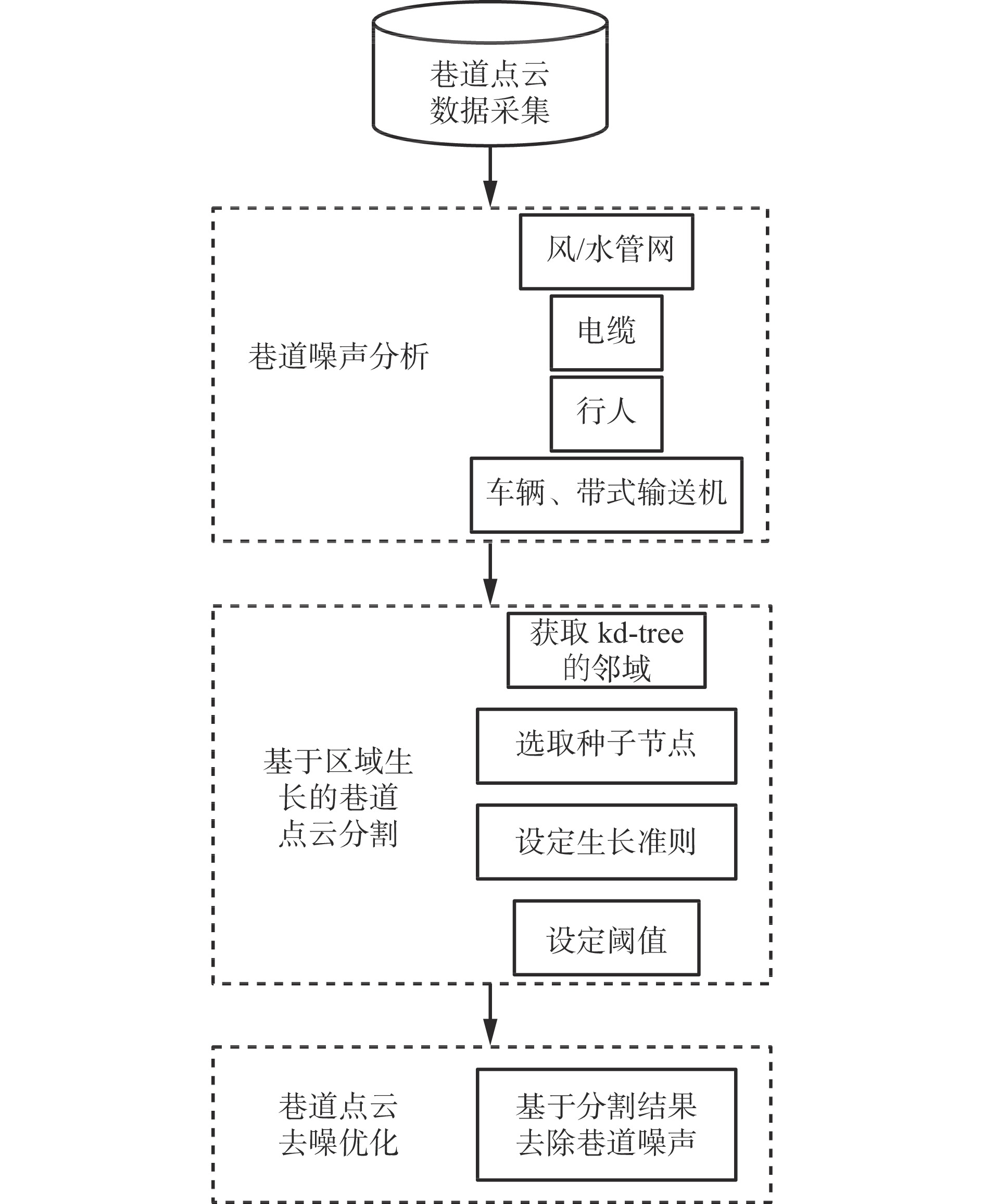
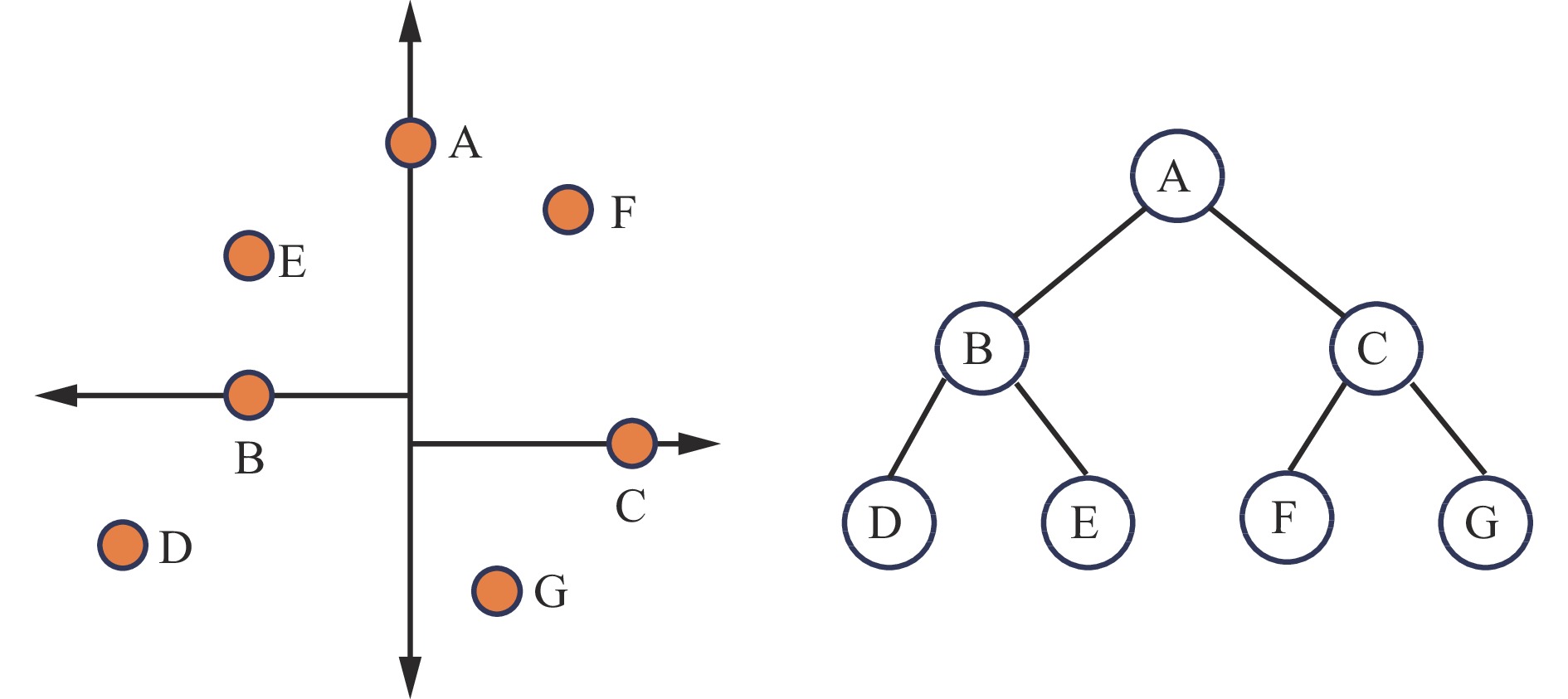
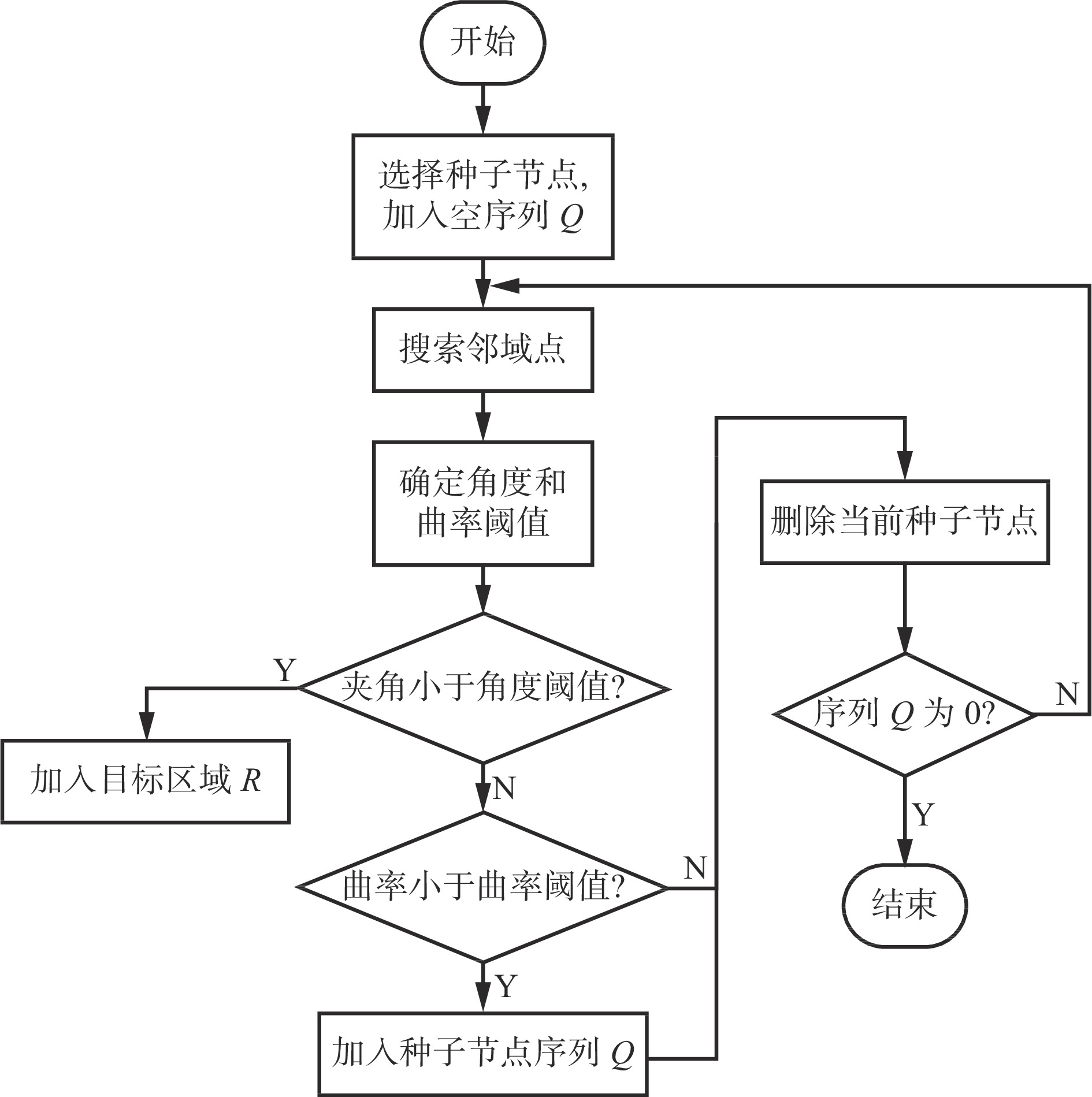
摘要: 目前针对地下巷道点云去噪研究未完全满足巷道点云的特殊去噪需求,尤其是在狭长、密闭且复杂的地下巷道环境中,未能充分应对管壁附属物、粉尘和人为噪声等因素造成的挑战。通过分析井下非结构场景和传感器误差,考虑行人、移动设备和管网带来的噪声,提出一种基于区域生长的非结构巷道点云去噪方法。利用三维激光扫描技术获得井下巷道场景的3D点云信息,并分析其中由于井下非结构场景和传感器误差造成的异常点,以及行人、移动设备和风/水管网形成的噪声特点;利用k维树(kd-tree)构建点云的拓扑关系,选取适当的种子节点和生长准则,设定合适的曲率和角度阈值,通过区域生长算法实现巷道点云的有效分割,去除未加入分割区域的离群点云;根据噪声特点,基于巷道点云区域分割结果进一步去噪优化。试验结果表明:对于巷道中存在行人、设备等特征的情况,建议将区域生长算法的角度阈值设定为10°左右,曲率阈值设定为3左右;在实际应用中,应平衡数据量的减少与去噪效果,以确保数据处理的有效性,同时提高数据质量;采用基于区域生长的非结构巷道点云去噪方法进行去噪时,点云数量减少幅度介于SOR滤波器和低通滤波器之间,能有效移除行人、设备等噪声。Abstract: Currently, research on point cloud denoising in underground roadways has not fully met the special denoising needs of roadway point clouds. Especially in narrow, enclosed, and complex underground roadway environments, the research has not fully addressed the challenges caused by pipe wall attachments, dust, and human noise. By analyzing the unstructured scenes and sensor errors underground, considering the noise caused by personnel, mobile devices, and pipeline networks, a point cloud denoising method for unstructured roadways based on region growth is proposed. The method uses 3D laser scanning technology to obtain 3D point cloud information of underground roadway scenes, and analyzes the abnormal points caused by unstructured underground scenes and sensor errors, as well as the noise features formed by personnel, mobile devices, and air and water pipelines. The method uses k-dimensional trees (kd-tree) to construct the topological relationship of point clouds, selects appropriate seed nodes and growth criteria, and sets appropriate curvature and angle thresholds. The method implements effective segmentation of roadway point clouds through region growth algorithms, and removes outlier point clouds that have not been added to the segmentation area. Based on the features of noise, further denoising optimization is carried out based on the segmentation results of the roadway point cloud region. The experimental results indicate that for situations where there are features such as personnel and equipment in the roadway, it is recommended to set the angle threshold of the region growth algorithm to around 10° and the curvature threshold to around 3. In practical applications, it is necessary to balance the reduction of data volume with the denoising effect to ensure the effectiveness of data processing and improve data quality. When using a region growth based unstructured roadway point cloud denoising method for denoising, the reduction in point cloud quantity is between SOR filter and low-pass filter, which can effectively remove noise such as personnel and equipment.
-

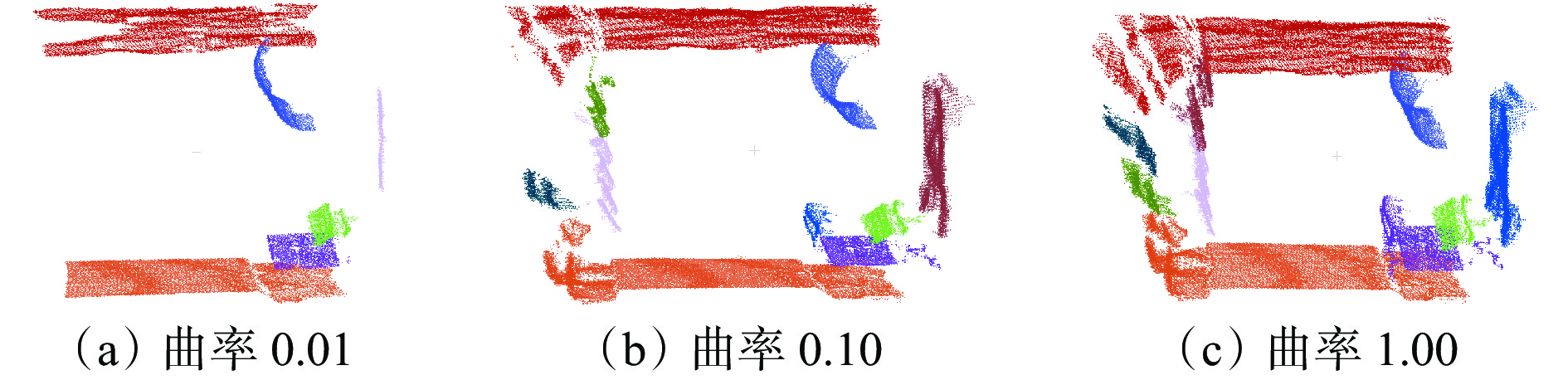
图 5 不同曲率阈值下巷道点云区域分割效果
Figure 5. Effect of roadway point cloud region segmentation under different curvature thresholds

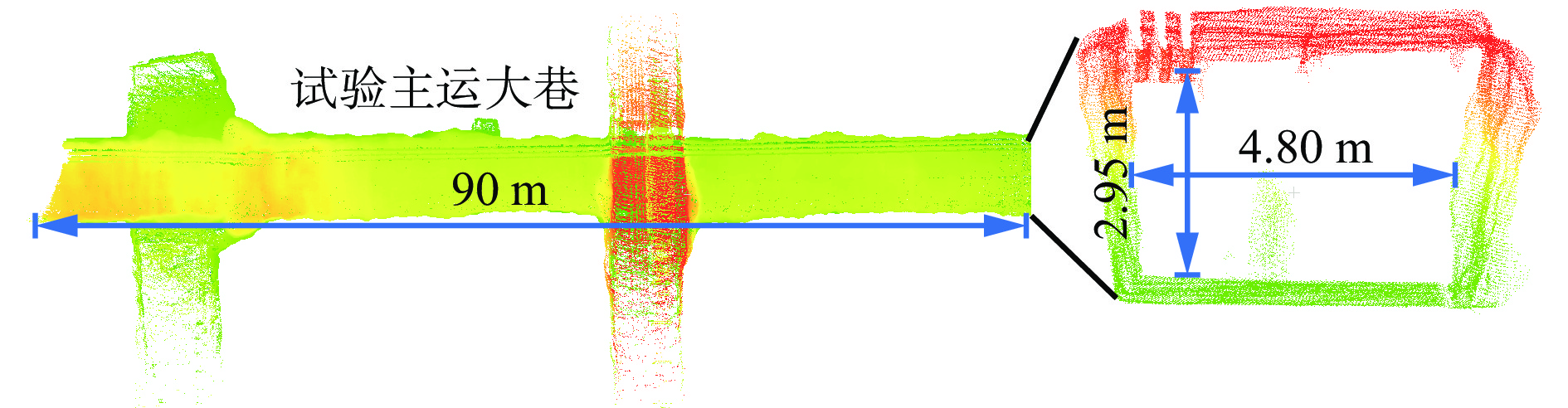
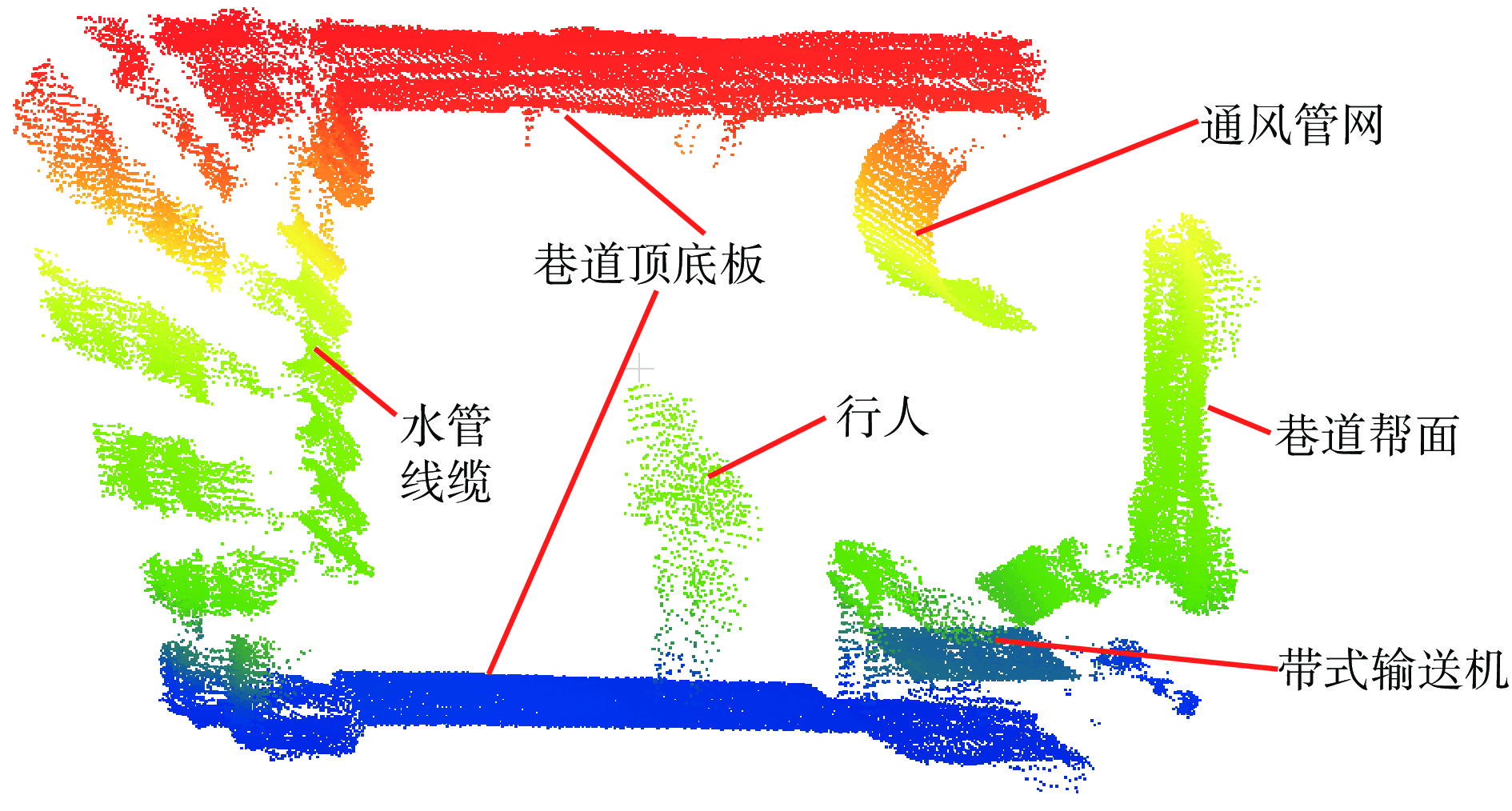
图 8 主运大巷21406工作面段三维点云
Figure 8. 3D point cloud in 21406 working face section of the main haulage tunnel

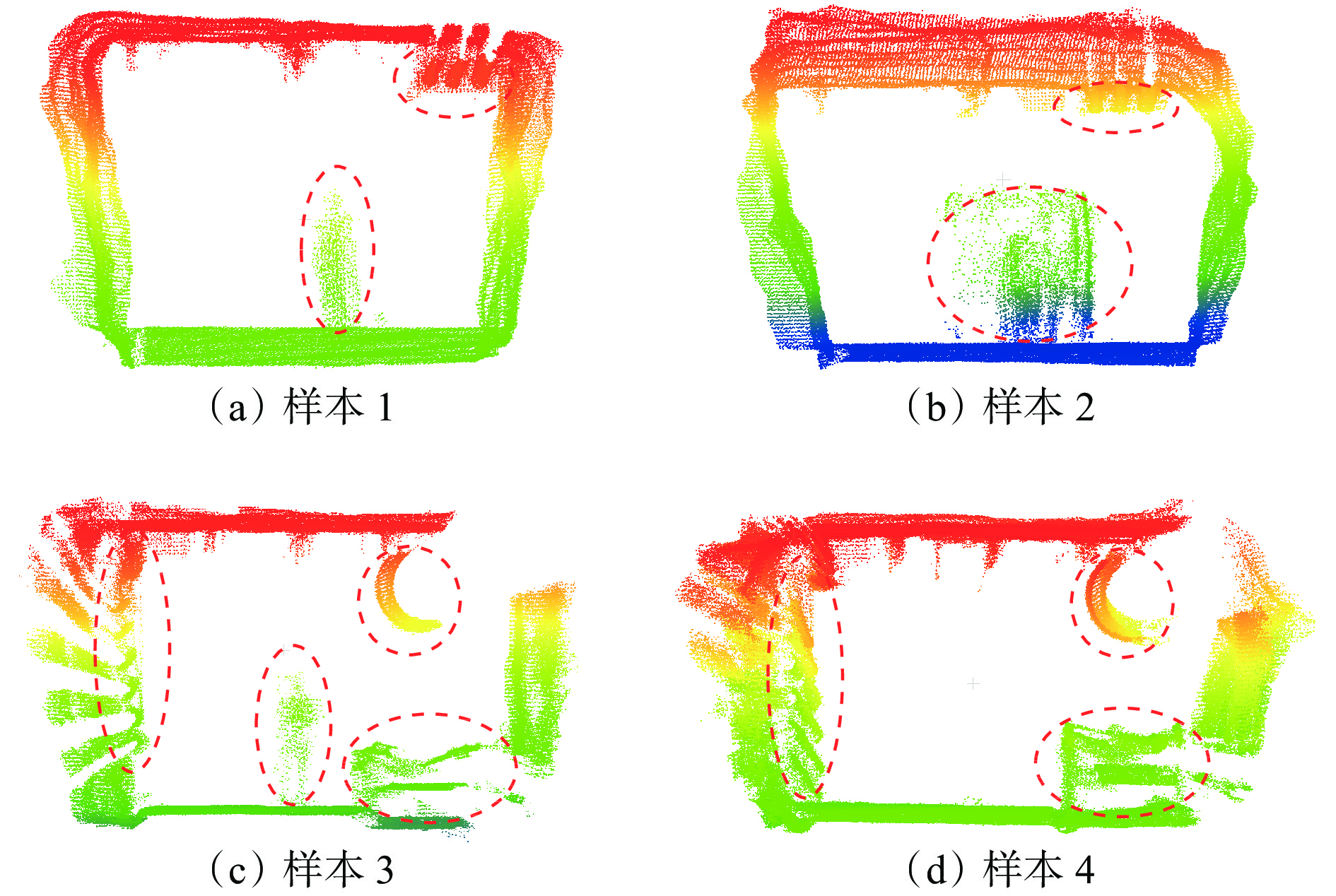
图 13 不同阈值下巷道点云区域分割效果
Figure 13. Effect of roadway point cloud region segmentation under different thresholds

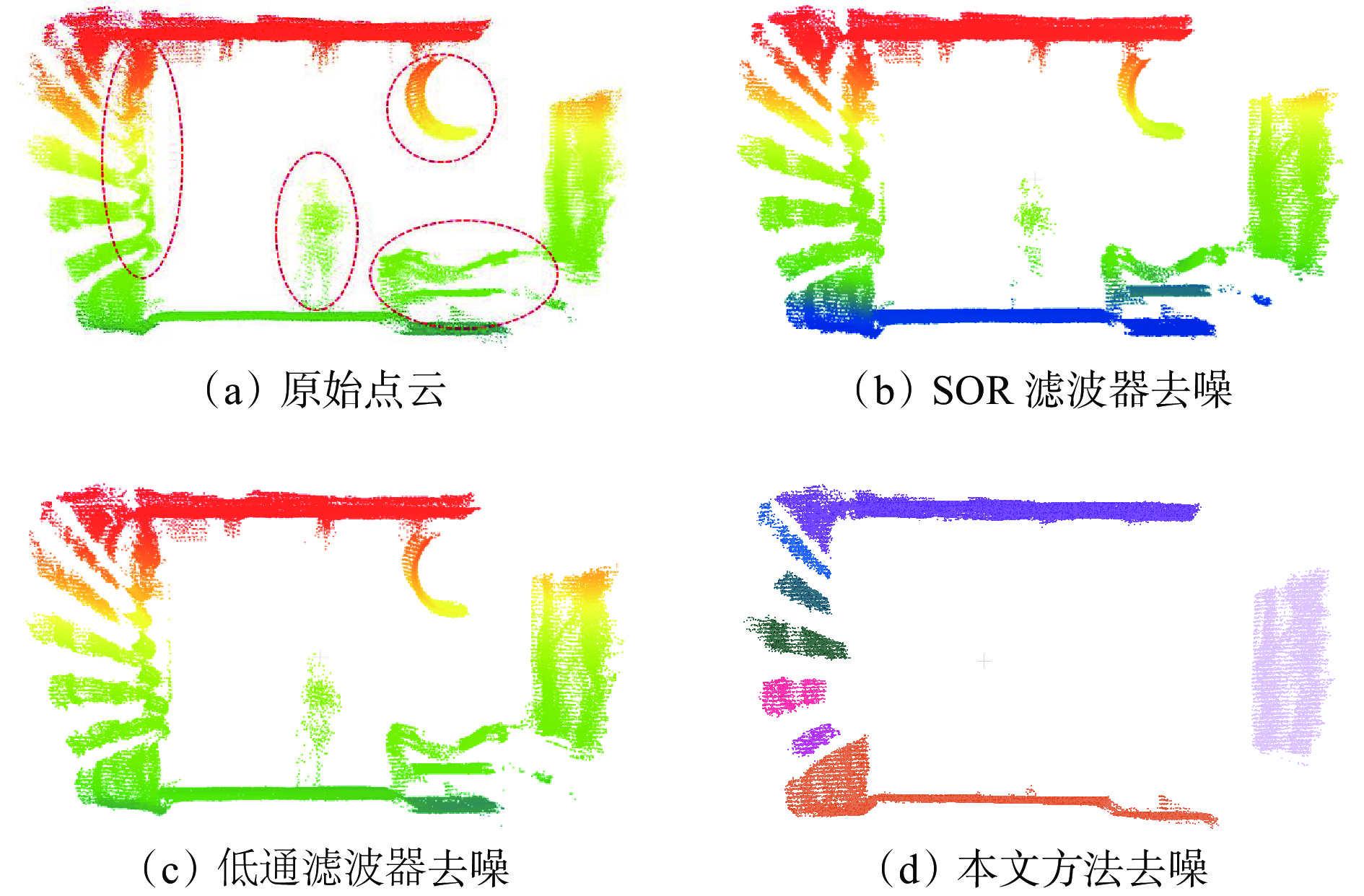
图 14 不同方法的巷道点云去噪效果
Figure 14. Denoising effect of different methods for roadway point cloud
表 1 去噪过程点云数量变化
Table 1. The number of point clouds changes during the denoising process
样本
序号点云数量/个 点云总
体减少
比例/%原始点云 分割点云 去噪后点云 1 148 690 123 424 123 424 16.99 2 123 338 102 271 101 014 18.10 3 145 379 129 775 98 114 32.51 4 210 808 184 270 148 858 29.30  下载: 导出CSV
下载: 导出CSV
表 2 不同方法去噪后点云数量对比
Table 2. Comparison of the number of point clouds after denoising by different methods
样本
序号原始点云
数量/个去噪后点云数量/个 SOR
滤波器低通
滤波器本文
方法1 148 690 142 549 99 004 123 424 2 123 338 118 979 74 039 101 014 3 145 379 136 073 90 882 98 114 4 210 808 195 975 143 882 148 858
下载: 导出CSV
-
[1] 王国法,杜毅博. 智慧煤矿与智能化开采技术的发展方向[J]. 煤炭科学技术,2019,47(1):1-10.WANG Guofa,DU Yibo. Development direction of intelligent coal mine and intelligent mining technology[J]. Coal Science and Technology,2019,47(1):1-10. [2] 王国法,刘峰,孟祥军,等. 煤矿智能化(初级阶段)研究与实践[J]. 煤炭科学技术,2019,47(8):1-36.WANG Guofa,LIU Feng,MENG Xiangjun,et al. Research and practice on intelligent coal mine construction(primary stage)[J]. Coal Science and Technology,2019,47(8):1-36. [3] 余润泽,单伽锃,李培振,等. 基于三维点云的工程结构平面分割及表面检测[J]. 中南大学学报(自然科学版),2023,54(6):2233-2243. doi: 10.11817/j.issn.1672-7207.2023.06.014YU Runze,SHAN Jiazeng,LI Peizhen,et al. Point cloud-based plane segmentation and surface inspection of engineering structures[J]. Journal of Central South University(Science and Technology),2023,54(6):2233-2243. doi: 10.11817/j.issn.1672-7207.2023.06.014 [4] KUMAR S S,PRATAP B B,SIMIT R. A review of laser scanning for geological and geotechnical applications in underground mining[J]. International Journal of Mining Science and Technology,2023,33(2):133-154. doi: 10.1016/j.ijmst.2022.09.022 [5] 戴文祥,陈雷,闫鹏飞,等. 基于三维激光扫描的煤矿巷道形变监测方法[J]. 工矿自动化,2023,49(10):61-67,95.DAI Wenxiang,CHEN Lei,YAN Pengfei,et al. A deformation monitoring method for coal mine roadway based on 3D laser scanning[J]. Journal of Mine Automation,2023,49(10):61-67,95. [6] RUSU R B,COUSINS S. 3D is here:point cloud library (PCL)[C]. IEEE International Conference on Robotics and Automation,Shanghai,2011:6324-6327. [7] KOLLURI R. Provably good moving least squares[C]. The 16th Annual ACM-SIAM Symposium on Discrete Algorithms,Vancouver,2008:1008-1017. [8] LIPMAN Y,COHEN-OR D,LEVIN D,et al. Parameterization-free projection for geometry reconstruction[J]. ACM Transactions on Graphics(TOG),2007,26(3). DOI: 10.1145/1276377.1276405. [9] HUANG Hui,WU Shihao,GONG Minglun,et al. Edge-aware point set resampling[J]. ACM Transactions on Graphics,2013,32(1):1-12. [10] HUANG Hui,LI Dan,ZHANG Hao,et al. Consolidation of unorganized point clouds for surface reconstruction[J]. ACM Transactions on Graphics,2009,28(5):1-7. [11] MATTEI E,CASTRODAD A. Point cloud denoising via moving RPCA[J]. Computer Graphics Forum:Journal of the European Association for Computer Graphics,2017,36(8):123-137. [12] SUN Yujing,SCHAEFER S,WANG Wenping. Denoising point sets via L0 minimization[J]. Computer Aided Geometric Design,2015,35:2-15. [13] ROVERI R,ÖZTIRELI A C,PANDELE I,et al. Pointpronets:consolidation of point clouds with convolutional neural networks[J]. Computer Graphics Forum,2018,37(2):87-99. doi: 10.1111/cgf.13344 [14] ZHANG Dongbo,LU Xuequan,QIN Hong,et al. Pointfilter:point cloud filtering via encoder-decoder modeling[J]. IEEE Transactions on Visualization and Computer Graphics,2020,27(3):2015-2027. [15] RAKOTOSAONA M J,LA BARBERA V,GUERRERO P,et al. Pointcleannet:learning to denoise and remove outliers from dense point clouds[J]. Computer Graphics Forum,2020,39(1):185-203. doi: 10.1111/cgf.13753 [16] CASAJUS P H,RITSCHEL T,ROPINSKI T. Total denoising:unsupervised learning of 3D point cloud cleaning[C]. IEEE/CVF International Conference on Computer Vision,Seoul,2019:52-60. [17] JONES T R. Feature preserving smoothing of 3D surface scans[D]. Cambridge:Massachusetts Institute of Technology,2003. [18] FLEISHMAN S,DRORI I,COHEN-OR D. Bilateral mesh denoising[J]. ACM Transactions on Graphics,2003,22(3):950-953. doi: 10.1145/882262.882368 [19] VOLLMER J,MENCL R,MUELLER H. Improved laplacian smoothing of noisy surface meshes[J]. Computer Graphics Forum,1999,18(3):131-138. doi: 10.1111/1467-8659.00334 [20] DESBRUN M,MEYER M,SCHRODER P,et al. Implicit fairing of irregular meshes using diffusion and curvature flow[C]. The 26th Annual Conference on Computer Graphics and Interactive Techniques,1999:317-324. DOI: 10.1145/311535.311576. [21] COMANICIU D,RAMESH V,MEER P. The variable bandwidth mean shift and data-driven scale selection[C]. The 8th IEEE International Conference on Computer Vision,Vancouver,2001:438-445. [22] GEORGESCU B,SHIMSHONI I,MEER P. Mean shift based clustering in high dimensions:a texture classification example[C]. The 9th IEEE International Conference on Computer Vision,Nice,2003:456-463. [23] COMANICIU D,MEER P. Mean shift analysis and applications[C]. The 7th IEEE International Conference on Computer Vision,Kerkyra,1999:1197-1203. [24] XU Xiangyang,YANG Hao,NEUMANN I. Time-efficient filtering method for three-dimensional point clouds data of tunnel structures[J]. Advances in Mechanical Engineering,2018,10(5). DOI: 10.1177/16878140187731. [25] 余鹏磊,于海洋,谢秋平,等. 基于RANSAC算法的地铁隧道点云数据滤波[J]. 测绘工程,2014,23(8):28-31. doi: 10.3969/j.issn.1006-7949.2014.08.007YU Penglei,YU Haiyang,XIE Qiuping,et al. Filtering for subway tunnel point cloud data based on RANSAC algorithm[J]. Engineering of Surveying and Mapping,2014,23(8):28-31. doi: 10.3969/j.issn.1006-7949.2014.08.007 [26] ZHU Ningning,JIAA Y,LUO Lun. Tunnel point cloud filtering method based on elliptic cylindrical model[J]. The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2016,41:735-740. [27] 陈建华,马宝,王蒙. 基于二次特征提取的煤矿巷道表面点云数据精简方法[J]. 工矿自动化,2023,49(12):114-120.CHEN Jianhua,MA Bao,WANG Meng. A method for simplifying surface point cloud data of coal mine roadways based on secondary feature extraction[J]. Journal of Mine Automation,2023,49(12):114-120. -





 点击查看大图
点击查看大图
计量
- 文章访问数: 27
- HTML全文浏览量: 8
- PDF下载量: 1
- 被引次数: 0
