

A calculation model for the associated position interference between the boom and shovel table mechanisms of intelligent roadheader
-
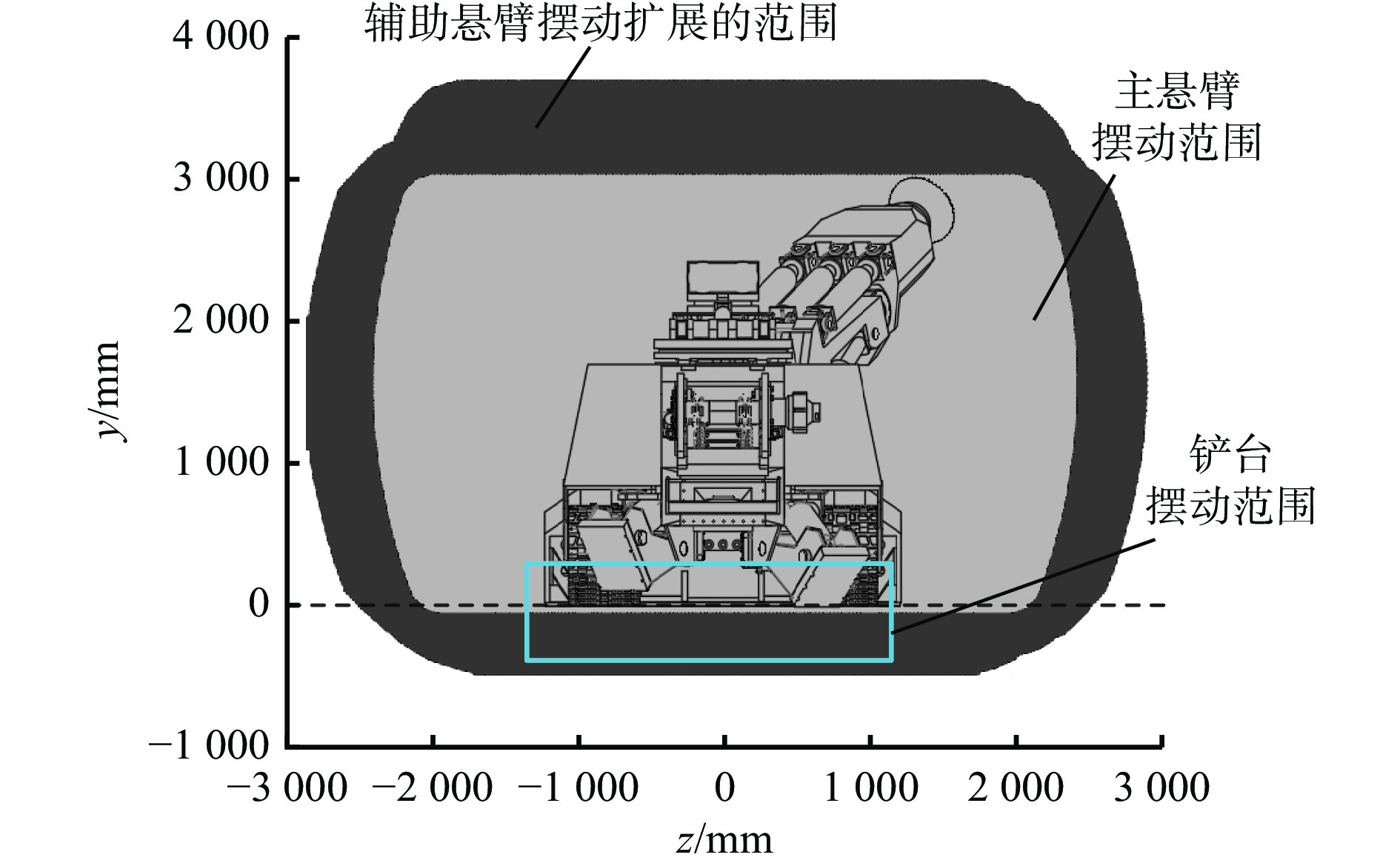
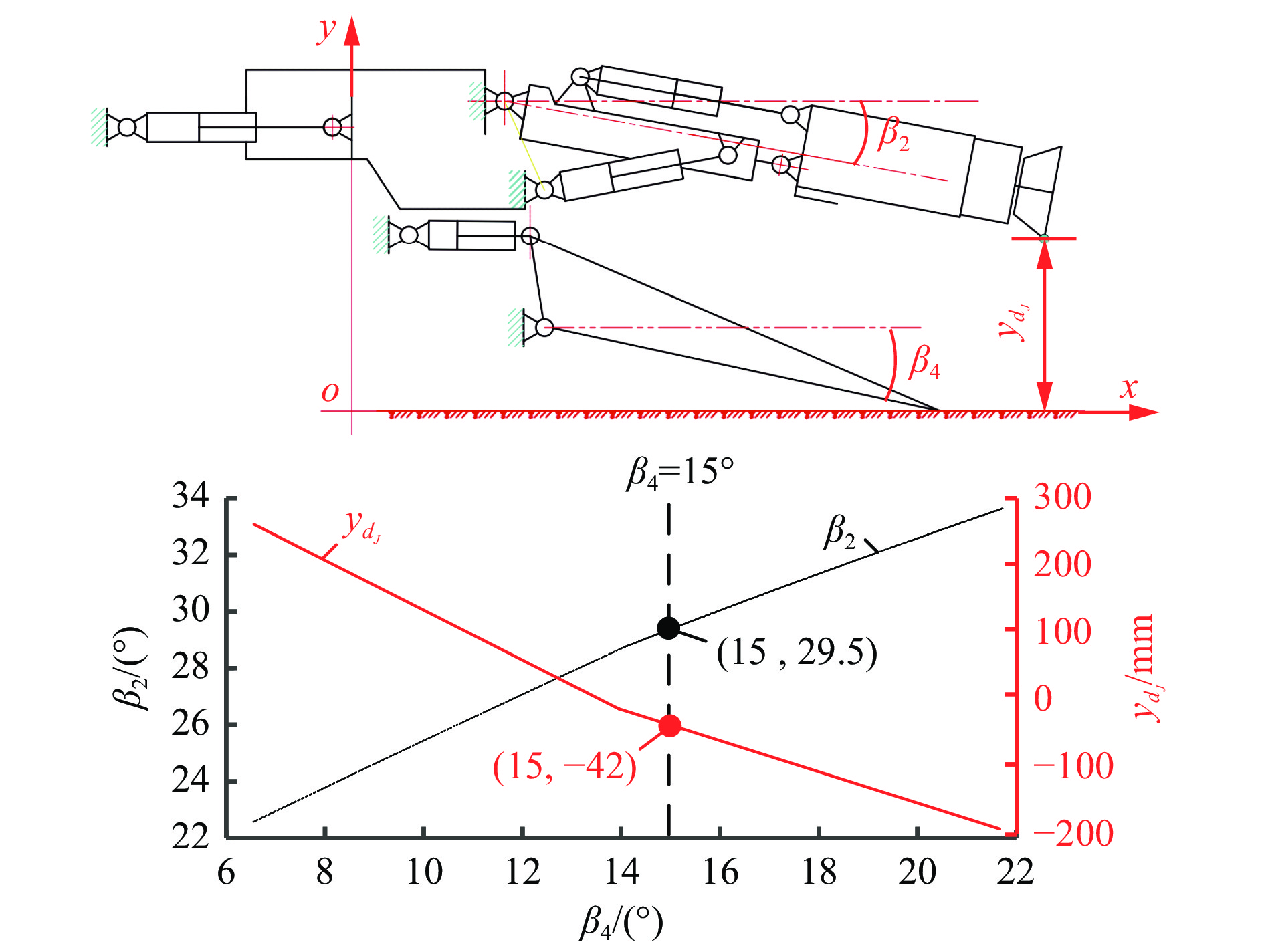
摘要: 智能化悬臂式掘进机在工作状态感知与控制过程中悬臂和铲台机构关联位置干涉,而现有悬臂式掘进机防干涉碰撞的研究主要是基于单一的控制方法,将防干涉碰撞条件融入到控制中的较少。针对上述问题,提出了一种悬臂和铲台机构关联位置干涉解算模型。基于多自由度悬臂式掘进机悬臂和铲台机构运动过程中的相对空间位置关系,将悬臂机构简化为分段空间直线、铲台机构简化为空间平面,根据悬臂边界等效分段空间直线上特定点和截割刀具边界点至铲台等效空间平面的距离,判断悬臂与铲台是否干涉。悬臂与铲台机构关联位置干涉解算模型应用实例表明:当铲台处在中位状态时,主悬臂和辅助悬臂无相对摆动下,悬臂和铲台不发生干涉碰撞的极限约束条件为主悬臂下摆动位置角不超过29.5°,截割刀具卧底量不超过42 mm;主悬臂和辅助悬臂协同摆动下,悬臂和铲台不发生干涉碰撞的极限约束条件为截割刀具卧底量不超过163 mm。悬臂和铲台机构关联位置干涉解算模型为悬臂与铲台干涉碰撞全域预测预警的数字化与智能自主控制奠定了基础。Abstract: In the process of working state perception and control, the intelligent boom-type roadheader interferes with the position of the boom and shovel table mechanism. However, the existing research on the prevention of interference and collision in boom-type roadheader is mainly based on a single control method. There are relatively few studies that integrate the prevention of interference and collision conditions into the control. In order to solve the above problems, a calculation model for associated position interference between the boom and shovel table mechanism is proposed. Based on the relative spatial position relationship between the boom and shovel table mechanism of a multi degree of freedom boom-type roadheader during the movement process, the boom mechanism is simplified as a segmented spatial straight line, and the shovel table mechanism is simplified as a spatial plane. Based on the distance between the specific points on the equivalent segmented spatial straight line of the boom boundary and the boundary point of the cutting tool to the equivalent spatial plane of the shovel table, the interference between the boom and shovel table is determined. The application example of the interference calculation model for the relationship between the boom and the shovel table mechanism show the following points. When the shovel platform is in the middle position, under the condition that the main boom and auxiliary boom have no relative swing, the ultimate constraint condition for the boom and shovel table to not interfere and collide is that the swing position angle of the main boom does not exceed 29.5°, and the cutting tool's bottom depth does not exceed 42 mm. The ultimate constraint condition for the boom and shovel table to not interfere and collide under the coordinated swing of the main boom and auxiliary boom is that cutting tool's bottom depth does not exceed 163 mm. The interference calculation model for the position interference between the boom and the shovel table mechanism lays the foundation for the digital and intelligent autonomous control of the full domain prediction and warning of the interference and collision between the boom and the shovel table.
-
Key words:
- boom-type roadheader /
- boom /
- shovel table /
- associated position /
- anti interference
-
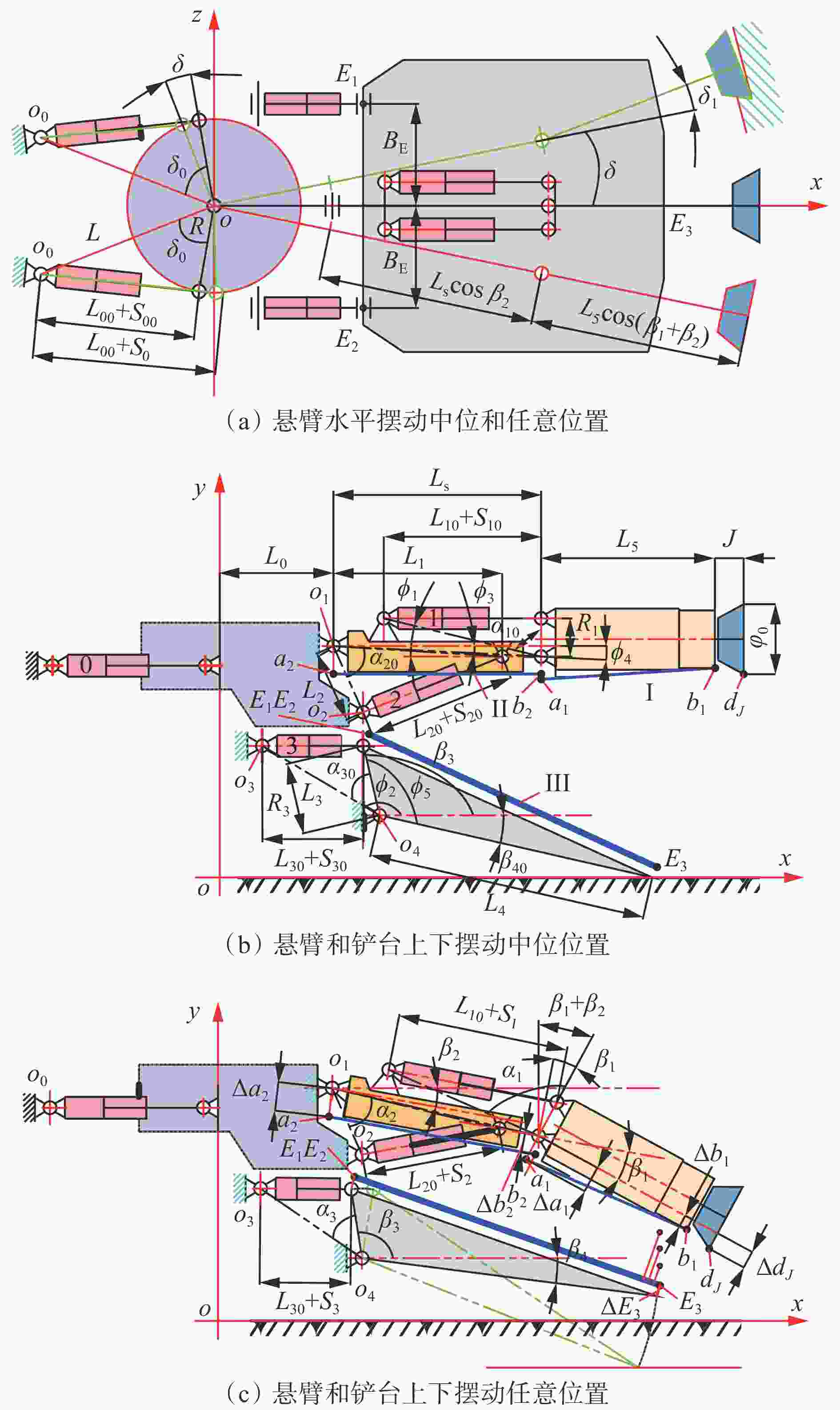
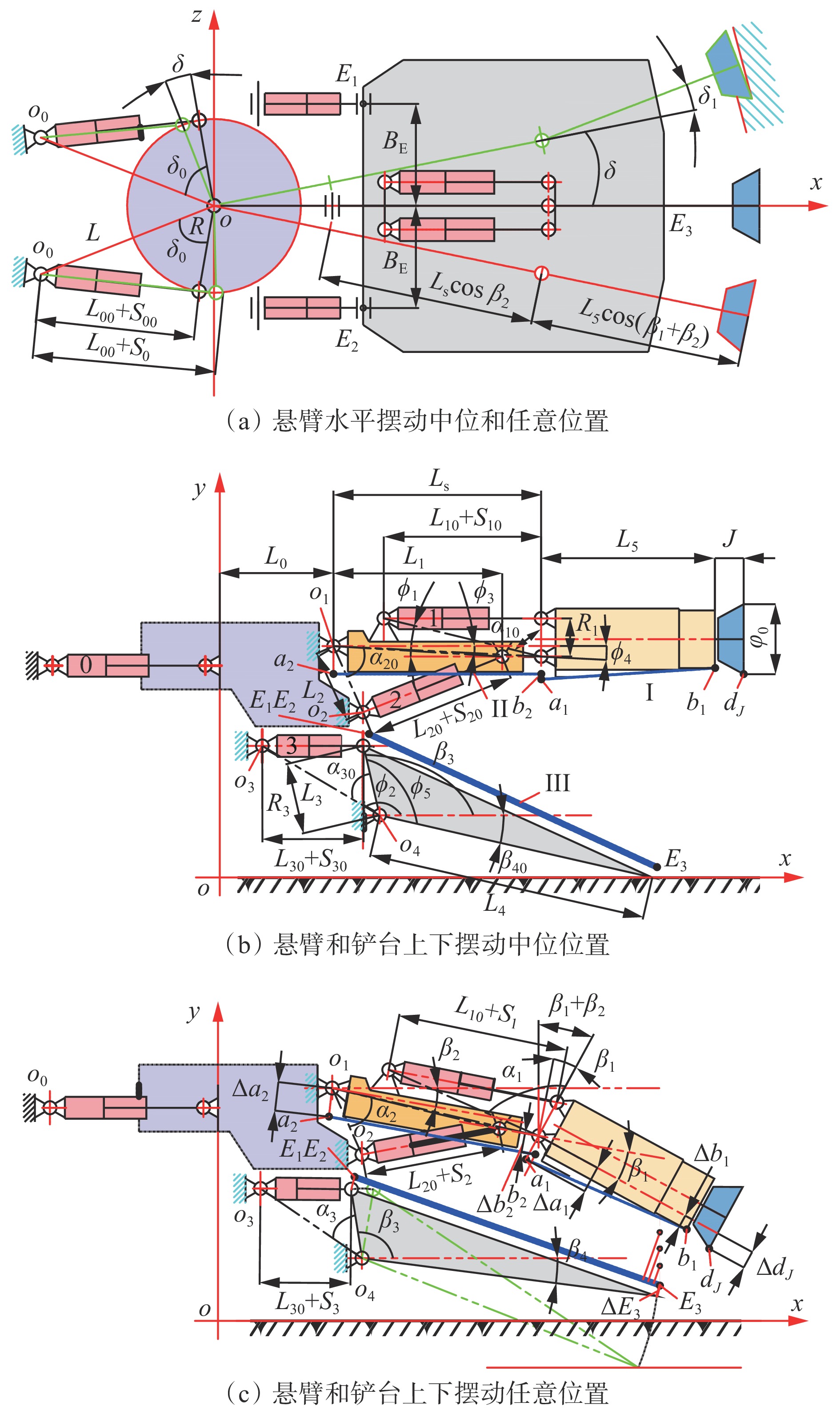
图 5 悬臂与铲台机构位置关联
Figure 5. Position correlation between boom mechanism and shovel table mechanism

图 8 辅助悬臂随主悬臂的极限摆动位置角
Figure 8. The ultimate swing angle of auxiliary boom with main boom
表 1 悬臂和铲台极限摆动位置角
Table 1. Limit swing angle of boom and shovel table
机构 位置角/(°) 水平摆动 向上摆动 向下摆动 主悬臂 δ=40 β2=30 β2=34 辅助悬臂 δ1=50 β1=35 β1=25 铲台 — β4=6.5~15 β4=15~21.7  下载: 导出CSV
下载: 导出CSV
表 2 各液压缸长度
Table 2. Length of each hydraulic cylinder
mm 液压缸 最小长度 最大长度 最大行程 辅助悬臂摆动液压缸 L10=915 L10+S1=1 365 S1=450 主悬臂水平摆动液压缸 L00=1 336 L00+ S0=2 044 S0=708 主悬臂上下摆动液压缸 L20=950 L20+ S2=1 400 S2=450 铲台上下摆动液压缸 L30=950 L30+ S3=1 400 S3=450
下载: 导出CSV
-
[1] 叶旺盛,步跃跃,吴晓华. 掘进机液压防干涉装置的设计研究[J]. 煤矿机械,2022,43(8):130-131.YE Wangsheng,BU Yueyue,WU Xiaohua. Design and research on hydraulic anti-interference device of roadheader[J]. Coal Mine Machinery,2022,43(8):130-131. [2] 刘送永,刘强,崔玉明,等. 煤矿悬臂式掘进机多信息监测系统设计与研究[J]. 煤炭学报,2023,48(6):2564-2578.LIU Songyong,LIU Qiang,CUI Yuming,et al. Design and research on multi-information monitoring system for roadheader[J]. Journal of China Coal Society,2023,48(6):2564-2578. [3] 张超,张旭辉,杜昱阳,等. 基于双目视觉的悬臂式掘进机位姿测量技术研究[J]. 煤炭科学技术,2021,49(11):225-235.ZHANG Chao,ZHANG Xuhui,DU Yuyang,et al. Measuring technique of cantilever roadheader position based on binocular stereo vision[J]. Coal Science and Technology,2021,49(11):225-235. [4] 朱殿烨. 基于SolidWorks Animator的掘进机升降油缸阀块运动干涉分析[J]. 煤矿机械,2012,33(5):228-230.ZHU Dianye. Analyzing motion interference of valve block of roadheader lifting cylinder based on solidworks animator[J]. Coal Mine Machinery,2012,33(5):228-230. [5] 左夺,李忠豹. 掘进机铲板防碰撞液压系统[J]. 中国新技术新产品,2022(3):85-87.ZUO Duo,LI Zhongbao. Hydraulic system for anti collision of excavator shovel[J]. New Technology & New Products of China,2022(3):85-87. [6] 马源,符世琛,张子悦,等. 悬臂式掘进机位姿检测方法研究现状[J]. 工矿自动化,2020,46(8):15-20.MA Yuan,FU Shichen,ZHANG Ziyue,et al. Research status of pose detection methods of boom-type roadheader[J]. Industry and Mine Automation,2020,46(8):15-20. [7] 刘涛. 基于截割轨迹的悬臂式掘进机防干涉问题研究[J]. 机械管理开发,2018,33(8):193-195,220.LIU Tao. Research on interference prevention of cantilever roadheader based on cutting track[J]. Mechanical Management and Development,2018,33(8):193-195,220. [8] 姬魁. 悬臂式综掘机干涉问题分析与解决措施[J]. 机电工程技术,2020,49(6):171-173.JI Kui. Analysis and solution of interference problem of cantilever type mining machine[J]. Mechanical & Electrical Engineering Technology,2020,49(6):171-173. [9] 刘春生,漆利平,赵汗青. 悬臂式掘进机的机械干涉[J]. 矿山机械,2007(8):44-46.LIU Chunsheng,QI Liping,ZHAO Hanqing. Mechanical interference of cantilever roadheader[J]. Mining & Processing Equipment,2007(8):44-46. [10] 李飞,张林,尚宇琦,等. 煤矿智能化掘进关键技术研究[J]. 工矿自动化,2023,49(4):33-41.LI Fei,ZHANG Lin,SHANG Yuqi,et al. Research on key technologies of coal mine intelligent excavation[J]. Journal of Mine Automation,2023,49(4):33-41. [11] 王鹏江,杨阳,王东杰,等. 悬臂式掘进机煤矸智能截割控制系统与方法[J]. 煤炭学报,2021,46(增刊2):1124-1134.WANG Pengjiang,YANG Yang,WANG Dongjie,et al. Intelligent cutting control system and method of coal and gangue in robotic roadheader[J]. Journal of China Coal Society,2021,46(S2):1124-1134. [12] 张旭辉,张超,王妙云,等. 数字孪生驱动的悬臂式掘进机虚拟操控技术[J]. 计算机集成制造系统,2021,27(6):1617-1628.ZHANG Xuhui,ZHANG Chao,WANG Miaoyun,et al. Digital twin-driven virtual control technology of cantilever roadheader[J]. Computer Integrated Manufacturing Systems,2021,27(6):1617-1628. [13] 秦彦博. 悬臂式掘进机自动截割技术研究[J]. 煤矿机械,2023,44(12):52-55.QIN Yanbo. Study on automatic cutting technology of boom-type roadheader[J]. Coal Mine Machinery,2023,44(12):52-55. [14] 张杰. 悬臂式掘进机装载机构优化设计[J]. 煤炭技术,2022,41(4):161-162.ZHANG Jie. Optimization design of loading mechanism of cantilever roadheader[J]. Coal Technology,2022,41(4):161-162. [15] 吴淼,沈阳,吉晓冬,等. 悬臂式掘进机行走轨迹及偏差感知方法[J]. 煤炭学报,2021,46(7):2046-2056.WU Miao,SHEN Yang,JI Xiaodong,et al. Trajectory and deviation perception method of boom-type roadheader[J]. Journal of China Coal Society,2021,46(7):2046-2056. [16] 雷振廷. 悬臂式掘进机的干涉分析及结构改造研究[D]. 西安:西安科技大学,2015.LEI Zhenting. Research on interference analysis and structure improved of boom-type roadheader[D]. Xi'an:Xi'an University of Science and Technology,2015. [17] 华洪涛,马宏伟,毛清华,等. 基于捷联惯导和推移油缸信息融合的智能掘进机器人位姿测量方法[J]. 煤炭工程,2021,53(11):140-145.HUA Hongtao,MA Hongwei,MAO Qinghua,et al. Pose measurement of intelligent roadheader based on strapdown inertial navigation and oil cylinder movement[J]. Coal Engineering,2021,53(11):140-145. [18] 马宏伟,王鹏,张旭辉,等. 煤矿巷道智能掘进机器人系统关键技术研究[J]. 西安科技大学学报,2020,40(5):751-759.MA Hongwei,WANG Peng,ZHANG Xuhui,et al. Research on key technology of intelligent tunneling robotic system in coal mine[J]. Journal of Xi'an University of Science and Technology,2020,40(5):751-759. [19] 朱彦秋,朱军帅,刘玉涛. 悬臂式掘进机的防干涉设计方法[J]. 煤矿机电,2012(6):84-85.ZHU Yanqiu,ZHU Junshuai,LIU Yutao. Anti-interference design methods for boom roadheader[J]. Colliery Mechanical & Electrical Technology,2012(6):84-85. [20] 刘春生,刘爽,刘若涵,等. 多自由度悬臂截割机构碟盘刀具的空间位姿模型[J]. 黑龙江科技大学学报,2022,32(5):641-648.LIU Chunsheng,LIU Shuang,LIU Ruohan,et al. Space pose of disc cutter based on multi-degree freedom cantilever cutting mechanism[J]. Journal of Heilongjiang University of Science and Technology,2022,32(5):641-648. [21] 臧富雨,王凯硕,吉晓冬,等. 悬臂式掘进机俯仰角调控系统仿真研究[J]. 工矿自动化,2019,45(5):62-67.ZANG Fuyu,WANG Kaishuo,JI Xiaodong,et al. Simulation research on pitch angle control system of boom roadheader[J]. Industry and Mine Automation,2019,45(5):62-67. -



 点击查看大图
点击查看大图

计量
- 文章访问数: 40
- HTML全文浏览量: 13
- PDF下载量: 7
- 被引次数: 0
