

Boom-type roadheader autonomous speed regulation cutting control system
-
摘要: 现有悬臂式掘进机截割控制采用较为单一的控制方法且截割头以定速完成巷道断面截割,未综合考虑轨迹规划和自主调速控制,在复杂地质条件下难以实现较高的巷道工程质量。针对上述问题,提出了一种悬臂式掘进机自主调速截割控制系统。首先,建立截割头和煤层的三维模型并导入ABAQUS软件进行有限元分析,获取截割头受到的反作用力与截割臂摆动速度之间的关系,进而得到截割臂摆动速度与截割头加速度之间的关系,利用k−means聚类方法对加速度进行分层。然后,采用层次包围盒算法建立截割头碰撞检测模型,规划合适的矩形巷道断面截割轨迹,经多次离散化生成离散截割轨迹规划点,对截割臂进行运动学逆解计算,获取截割头到达离散截割轨迹规划点所需的截割臂回转弧度、抬升弧度和伸长量,并利用全局最优速度模型求解截割头运动至离散截割轨迹规划点的速度。最后,利用加速度传感器采集截割臂振动信号,根据加速度分层结果确定截割臂目标摆动速度,并通过模糊PID控制使截割臂摆动速度及时准确地随截割头加速度的变化调整到目标摆动速度。实验结果表明:采用模糊PID控制可实现较为快速、无超调量的截割臂摆动速度调节;与定速截割控制相比,采用自主调速截割控制的巷道断面成形质量高,宽度规格偏差降低了37%,高度规格偏差降低了17%,满足MT/T 5009—1994《煤矿井巷工程质量检验评定标准》规定的巷道成形质量要求。Abstract: The existing boom-type roadheader cutting control adopts a relatively simple control method and the cutting head completes the roadway section cutting at a constant speed. There's no comprehensive consideration of trajectory planning and autonomous speed control. Therefore, it is difficult to achieve high roadway engineering quality under complex geological conditions. In order to solve the above problems, a boom-type roadheader autonomous speed regulation cutting control system is proposed. Firstly, the three-dimensional model of the cutting head and coal seam are established and imported to ABAQUS software for finite element analysis. The relationship between the reaction force on the cutting head and the swing speed of the cutting arm is obtained. Then the relationship between the swing speed of the cutting arm and the acceleration of the cutting head is obtained. The acceleration is stratified by k-means clustering method. Secondly, the collision detection model of the cutting head is established by using the bounding volume hierarchy algorithm. The appropriate cutting trajectory of the rectangular roadway section is planned. The discrete cutting path planning points are generated through multiple discretizations. The inverse kinematics solution of the cutting arm is calculated to obtain the rotation radian, lifting radian and elongation of the cutting arm required for the cutting head to reach the discrete cutting path planning point. The global optimal speed model is used to solve the speed of the cutting head to move to the discrete cutting path planning point. Finally, the acceleration sensor is used to collect the vibration signal of the cutting arm. The target swing speed of the cutting arm is determined according to the acceleration layering result. Through fuzzy PID control, the swing speed of the cutting arm is adjusted to the target swing speed in time and accurately with the change of the cutting head acceleration. The experimental results show that the fuzzy PID control can achieve a relatively fast and non-overshoot swing speed adjustment of the cutting arm. Compared with the constant speed cutting control, the roadway section forming quality using the autonomous speed control cutting control is high. The width specification deviation is reduced by 37%, and the height specification deviation is reduced by 17%. The results meet the requirements of roadway forming quality specified in MT/T 5009-1994 Standard for quality inspection and assessment of coal mine roadway engineering.
-

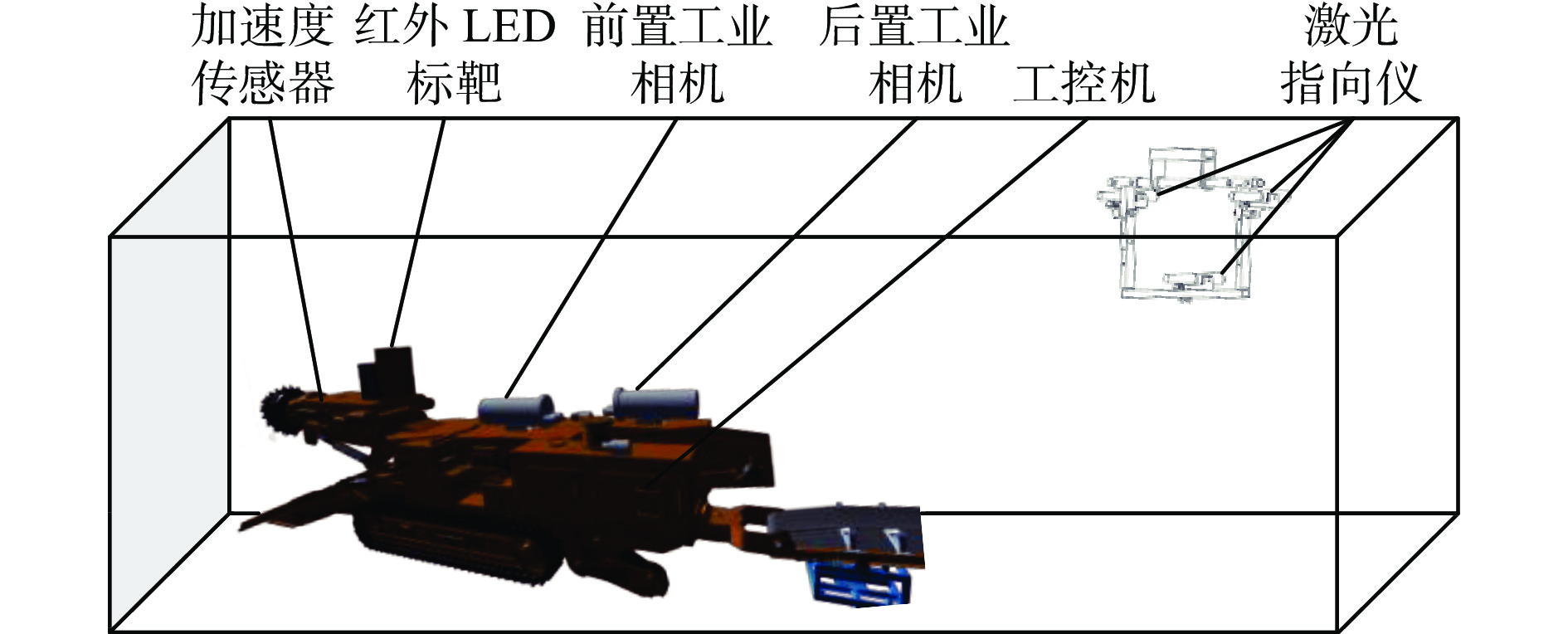
图 1 悬臂式掘进机自主调速截割控制系统组成
Figure 1. Composition of boom-type roadheader autonomous speed regulation cutting control system

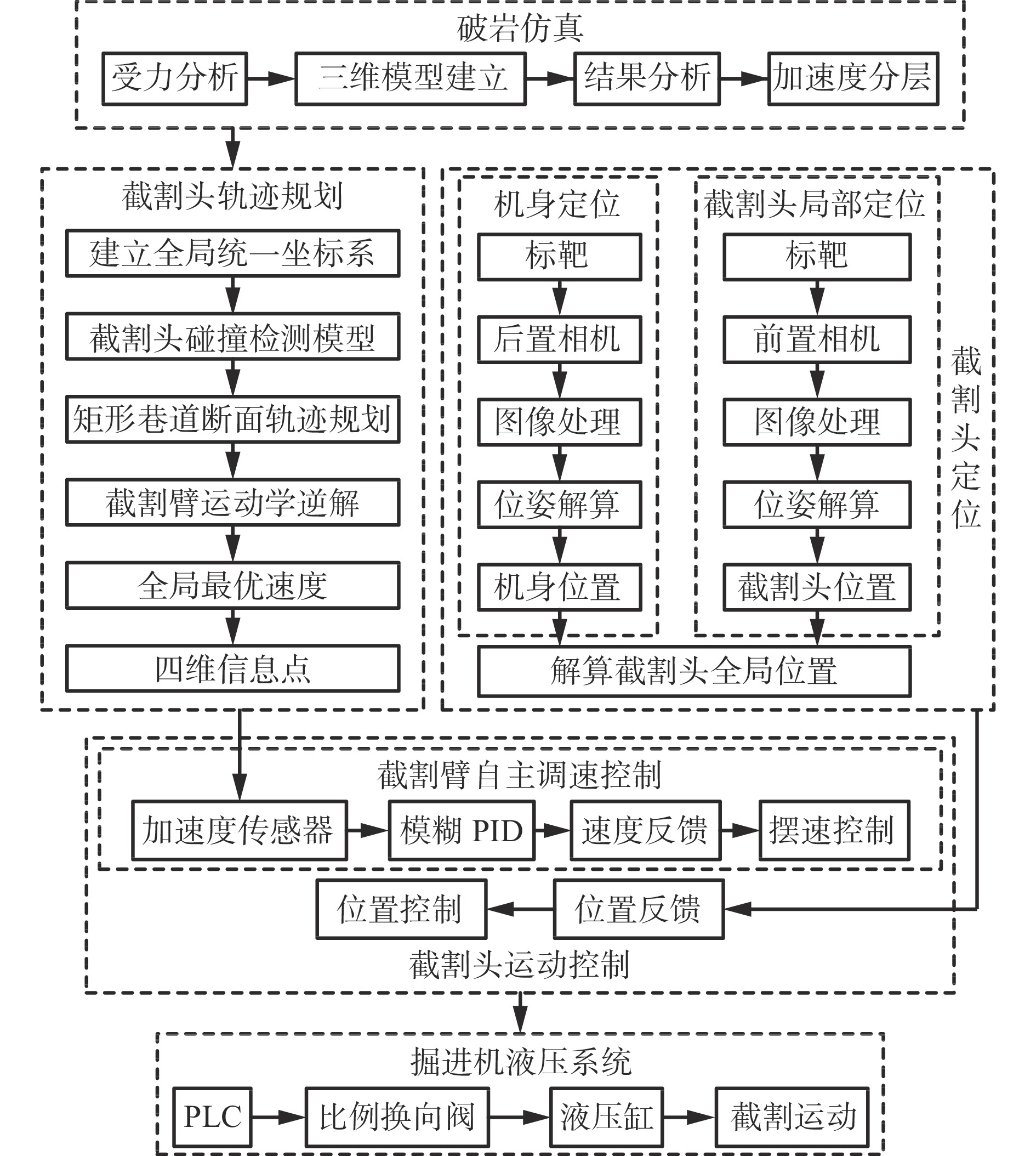
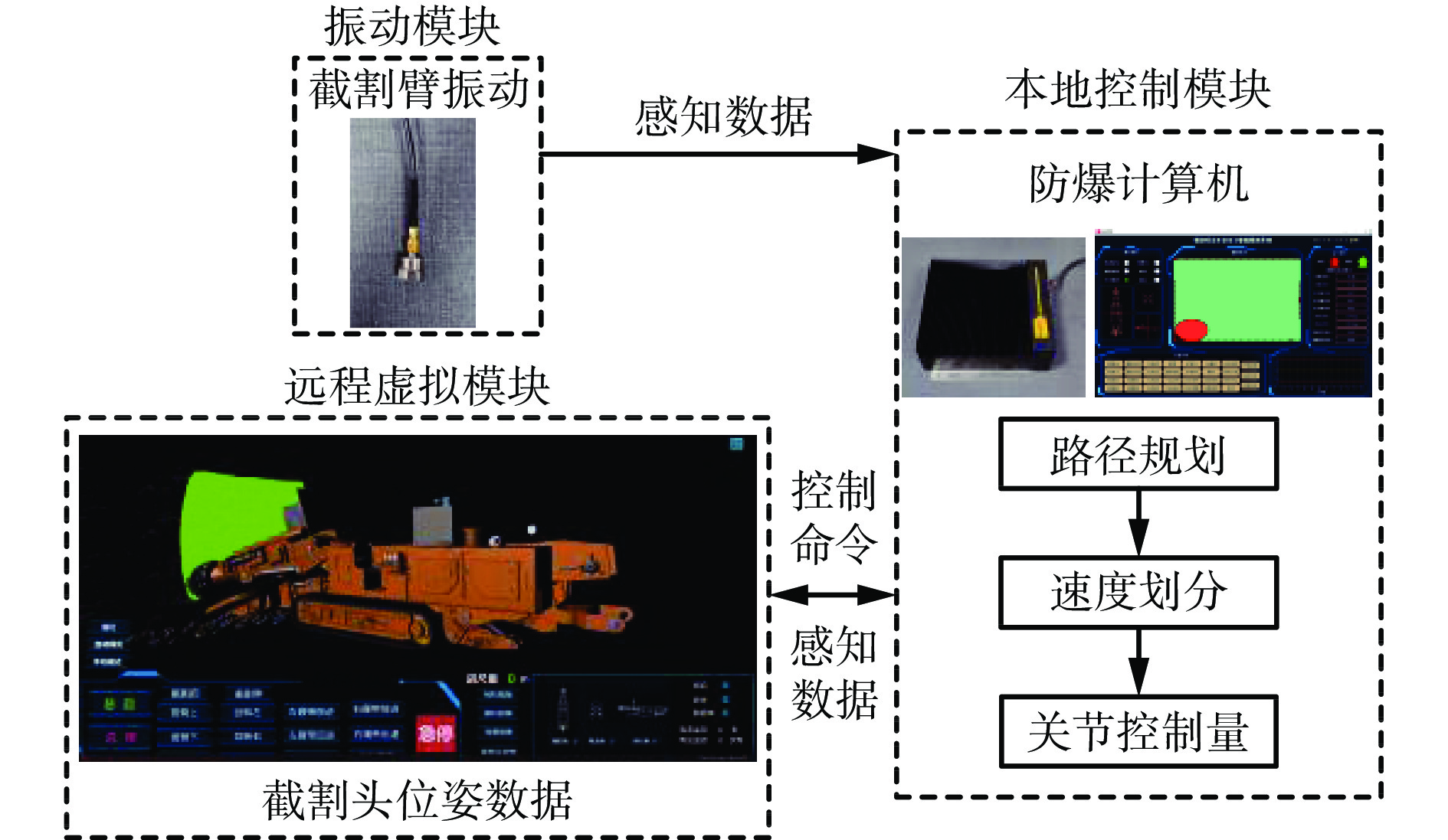
图 2 悬臂式掘进机自主调速截割控制系统总体方案
Figure 2. Overall scheme of boom-type roadheader autonomous speed regulation cutting control system

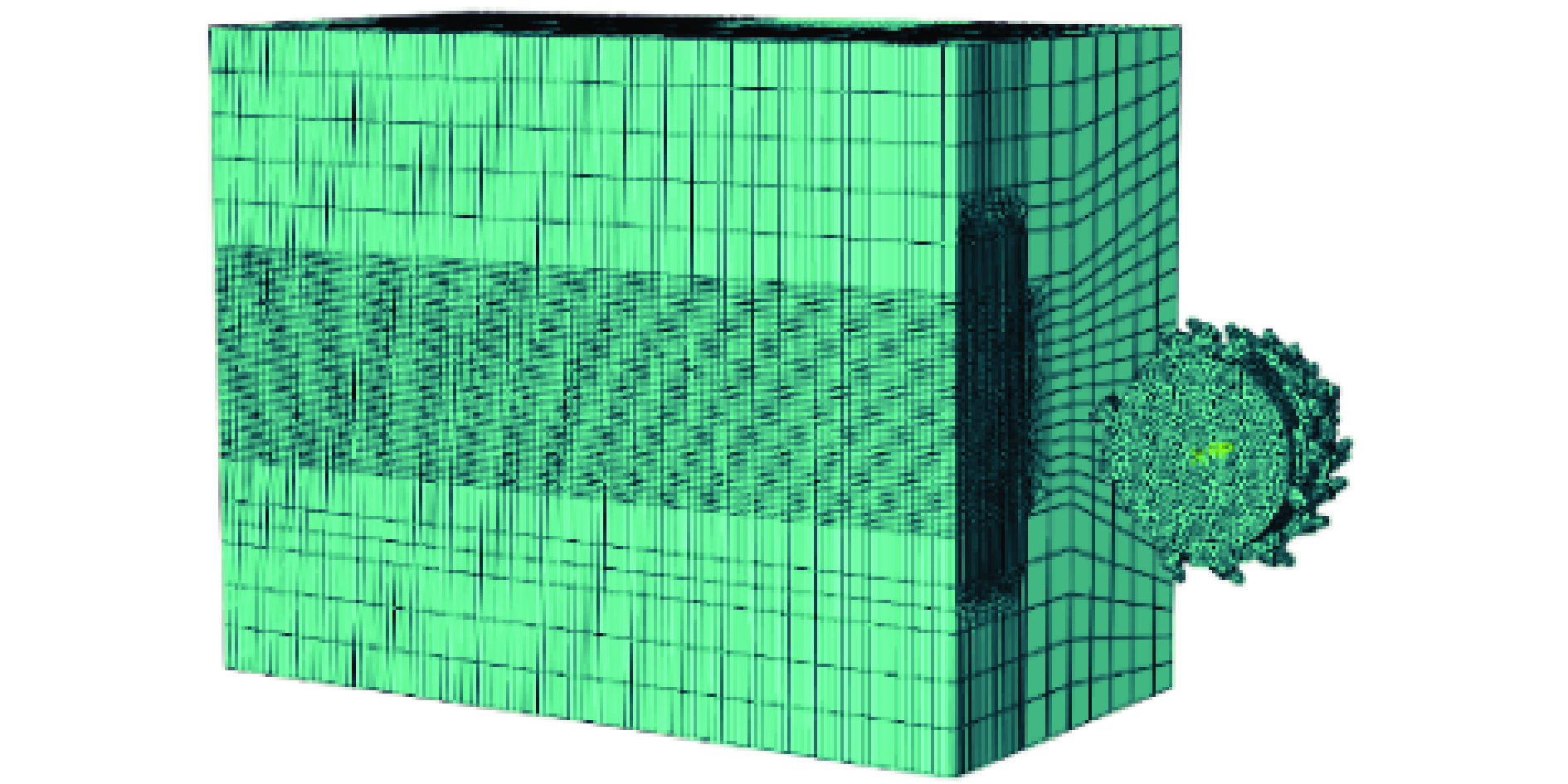
图 8 煤层和截割头的三维模型网格
Figure 8. Three-dimensional model grid of coal seam and cutting head

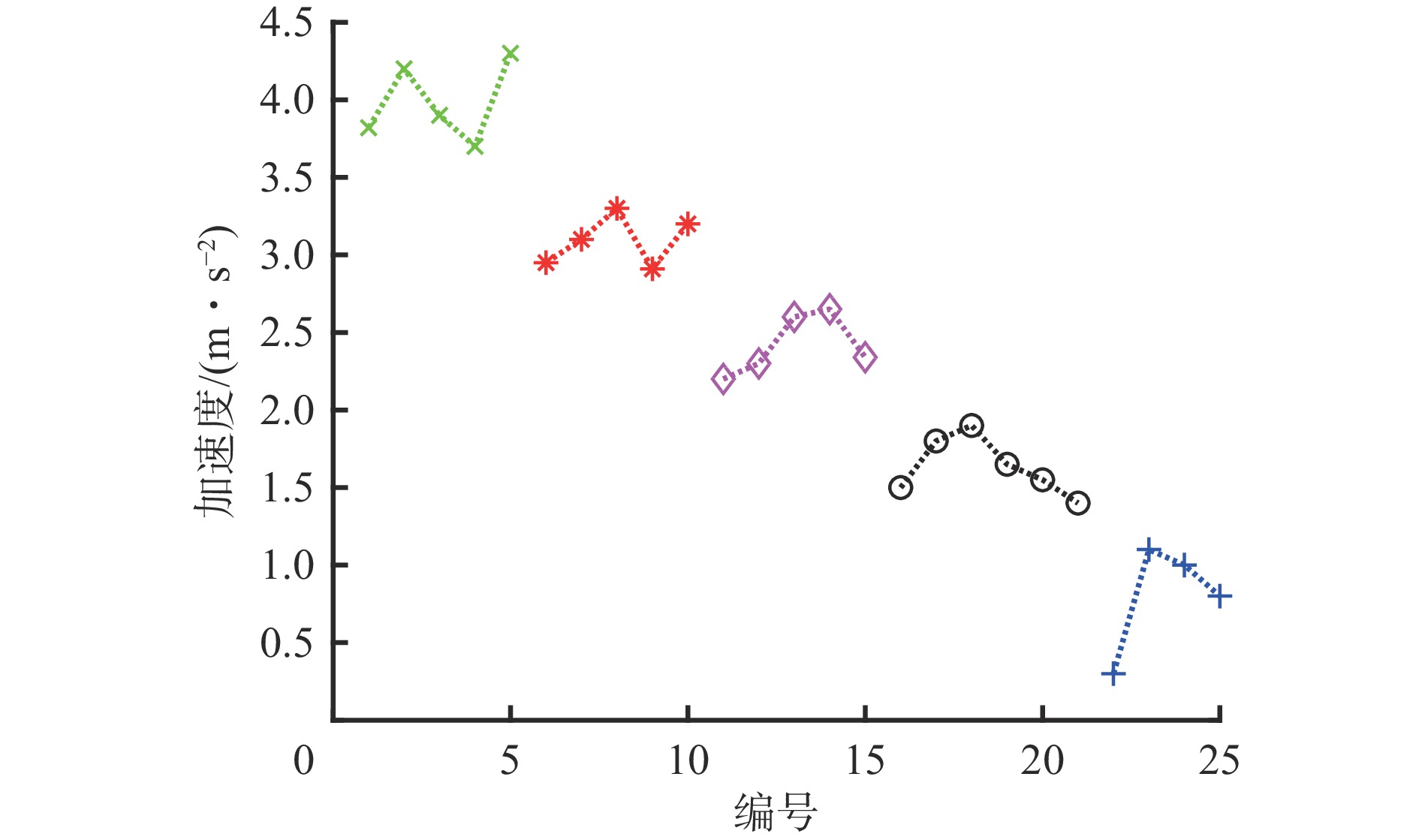
图 9 不同截割臂摆动速度下截割头受到的反作用力
Figure 9. Reaction force of cutting head under different swing speed of cutting arm

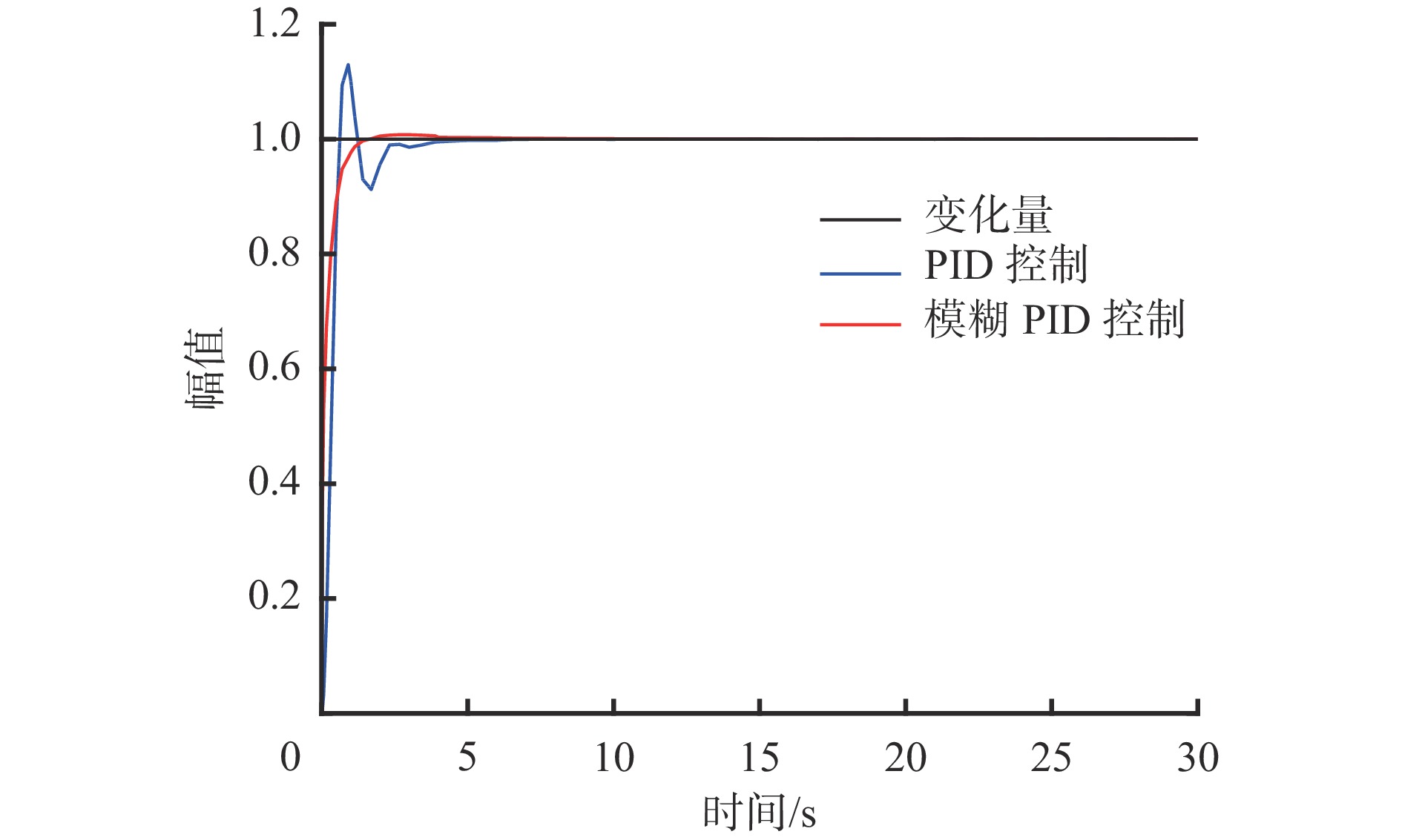
图 11 PID控制和模糊PID控制效果对比
Figure 11. Effect comparison of PID control and fuzzy PID control

图 12 悬臂式掘进机虚拟调速截割控制实验平台
Figure 12. Experimental platform of boom-type roadheader virtual speed regulation cutting control
表 1 模糊控制规则
Table 1. Fuzzy control rules
$\Delta e$ e NB NM NS ZO PS PM PB NB PB/NB/PS PB/NB/NS PM/NM/NB PM/NM/NB PS/NS/NB ZO/ZO/NM ZO/ZO/PS NM PB/NB/PS PB/NB/NS PM/NM/NB PS/NS/NM PS/NS/NM ZO/ZO/NS NS/ZO/ZO NS PM/NB/ZO PM/NM/NS PM/NS/NM PS/NS/NM ZO/ZO/NS NS/PS/NS NS/PS/ZO ZO PM/NM/ZO PM/NM/NS PS/NS/NS ZO/ZO/NS NS/PS/NS NM/PM/NS NM/PM/ZO PS PS/NM/ZO PS/NS/ZO PS/ZO/ZO ZO/PS/ZO NS/PS/ZO NM/PM/ZO NM/PB/ZO PM PS/ZO/PB ZO/ZO/NS NS/PS/PS NM/PS/PS NM/PM/PS NM/PB/PS NB/PB/PB PB ZO/ZO/PB ZO/ZO/PM NM/PS/PM NM/PM/PM NM/PM/PS NB/PB/PS NB/PB/PS  下载: 导出CSV
下载: 导出CSV
表 2 煤层参数
Table 2. Coal seam parameters
密度/
$ (\mathrm{k}\mathrm{g}\cdot {\mathrm{m}}^{-3}) $内摩擦角/
(°)流变
应力比膨胀角/
(°)屈服应力/
Pa弹性模量/
Pa泊松比 $1.4 \times {10^{ - 9}}$ 47.73 1 35 26.7 2 375 0.26
下载: 导出CSV
表 3 编号和速度对应关系
Table 3. Mapping between number and speed
编号 速度/(m·s−1) 1—5 0.30 6—10 0.25 11—15 0.20 16—20 0.15 21—25 0.10
下载: 导出CSV
表 4 离散截割轨迹规划点的四维数据
Table 4. Four-dimensional data of discrete cutting trajectory planning points
回转弧度/rad 抬升弧度/rad 伸长量/mm 速度/(m·s−1) 0.220 −1.289 656.4 0.3 0 −1.282 535.7 0.3 −0.220 −1.289 656.4 0.3 −0.220 −1.397 542.7 0.3 0 −1.393 418.9 0.3 0.220 −1.397 542.7 0.3 0.220 −1.510 483.8 0.3 0 −1.508 358.4 0.3 −0.220 −1.510 483.8 0.3 −0.220 −1.624 482.0 0.3 0 −1.626 356.5 0.3 0.220 −1.624 482.0 0.3 0.220 −1.737 537.3 0.3 0 −1.742 413.4 0.3 −0.220 −1.737 537.3 0.3
下载: 导出CSV
表 5 巷道断面截割实验结果
Table 5. Experimental results of roadway section cutting
巷道 实验次数 定速截割控制 自主调速截割控制 巷道宽度/
mm巷道高度/
mm巷道宽度/
mm巷道高度/
mm1号 1 4 276 3 260 4 172 3 245 2 4 265 3 240 4 151 3 180 3 4 242 3 255 4 168 3 204 2号 1 4 240 2 750 4 162 2 694 2 4 261 2 735 4 155 2 715 3 4 247 2 742 4 168 2 707 3号 1 3 241 2 740 3 140 2 690 2 3 232 2 743 3 148 2 682 3 3 246 2 760 3 162 2 680
下载: 导出CSV
-
[1] 刘峰,曹文君,张建明,等. 我国煤炭工业科技创新进展及“十四五”发展方向[J]. 煤炭学报,2021,46(1):1-15. doi: 10.13225/j.cnki.jccs.2021.0042LIU Feng,CAO Wenjun,ZHANG Jianming,et al. Current technological innovation and development direction of the 14th Five-Year Plan period in China coal industry[J]. Journal of China Coal Society,2021,46(1):1-15. doi: 10.13225/j.cnki.jccs.2021.0042 [2] 王国法,王虹,任怀伟,等. 智慧煤矿2025情景目标和发展路径[J]. 煤炭学报,2018,43(2):295-305. doi: 10.13225/j.cnki.jccs.2018.0152WANG Guofa,WANG Hong,REN Huaiwei,et al. 2025 scenarios and development path of intelligent coal mine[J]. Journal of China Coal Society,2018,43(2):295-305. doi: 10.13225/j.cnki.jccs.2018.0152 [3] 张旭辉,赵建勋,杨文娟,等. 悬臂式掘进机视觉导航与定向掘进控制技术[J]. 煤炭学报,2021,46(7):2186-2196. doi: 10.13225/j.cnki.jccs.zn20.0357ZHANG Xuhui,ZHAO Jianxun,YANG Wenjuan,et al. Vision-based navigation and directional heading control technologies of boom-type roadheader[J]. Journal of China Coal Society,2021,46(7):2186-2196. doi: 10.13225/j.cnki.jccs.zn20.0357 [4] 张旭辉,张超,杨文娟,等. 悬臂式掘进机可视化辅助截割系统研制[J]. 煤炭科学技术,2018,46(12):21-26. doi: 10.13199/j.cnki.cst.2018.12.004ZHANG Xuhui,ZHANG Chao,YANG Wenjuan,et al. Research and development of visual auxiliary cutting system for cantilever roadheader[J]. Coal Science and Technology,2018,46(12):21-26. doi: 10.13199/j.cnki.cst.2018.12.004 [5] 王虹,王步康,张小峰,等. 煤矿智能快掘关键技术与工程实践[J]. 煤炭学报,2021,46(7):2068-2083. doi: 10.13225/j.cnki.jccs.jj21.0412WANG Hong,WANG Bukang,ZHANG Xiaofeng,et al. Key technology and engineering practice of intelligent rapid heading in coal mine[J]. Journal of China Coal Society,2021,46(7):2068-2083. doi: 10.13225/j.cnki.jccs.jj21.0412 [6] 马宏伟,王世斌,毛清华,等. 煤矿巷道智能掘进关键共性技术[J]. 煤炭学报,2021,46(1):310-320. doi: 10.13225/j.cnki.jccs.yg20.1904MA Hongwei,WANG Shibin,MAO Qinghua,et al. Key common technology of intelligent heading in coal mine roadway[J]. Journal of China Coal Society,2021,46(1):310-320. doi: 10.13225/j.cnki.jccs.yg20.1904 [7] 张旭辉,杨文娟,薛旭升,等. 煤矿远程智能掘进面临的挑战与研究进展[J]. 煤炭学报,2022,47(1):579-597.ZHANG Xuhui,YANG Wenjuan,XUE Xusheng,et al. Challenges and developing of the intelligent remote control on roadheaders in coal mine[J]. Journal of China Coal Society,2022,47(1):579-597. [8] 王苏彧,马登成,任泽,等. 悬臂式掘进机断面成型轨迹多目标优化方法研究[J]. 仪器仪表学报,2021,41(8):183-192. doi: 10.19650/j.cnki.cjsi.J2107750WANG Suyu,MA Dengcheng,REN Ze,et al. A multi-objective optimization method for cantilever roadheader section forming trajectory[J]. Chinese Journal of Scientific Instrument,2021,41(8):183-192. doi: 10.19650/j.cnki.cjsi.J2107750 [9] 田劼,银晓琦,文艺成. 基于混合IWO−PSO算法的掘进机截割轨迹规划方法[J]. 工矿自动化,2021,47(12):55-61.TIAN Jie,YIN Xiaoqi,WEN Yicheng. Method of cutting trajectory planning of roadheader based on hybrid IWO-PSO algorithm[J]. Industry and Mine Automation,2021,47(12):55-61. [10] 王旭启,杜振华. 基于模糊算法的掘进机截割机构变频控制策略研究[J]. 现代电子技术,2017,40(11):176-178,182. doi: 10.16652/j.issn.1004-373x.2017.11.044WANG Xuqi,DU Zhenhua. Research on fuzzy algorithm based variable-frequency control strategy for cutting device of roadheader[J]. Modern Electronics Technique,2017,40(11):176-178,182. doi: 10.16652/j.issn.1004-373x.2017.11.044 [11] 谢亚洲. 悬臂式掘进机智能控制系统研究[D]. 西安: 西安科技大学, 2019.XIE Yazhou. Research on intelligent control system of boom-type roadheader[D]. Xi'an: Xi'an University of Science and Technology, 2019. [12] 谢苗,李晓婧,刘治翔. 基于PID的掘进机横摆速度智能控制[J]. 机械设计与研究,2019,35(1):125-127,132. doi: 10.13952/j.cnki.jofmdr.2019.0113XIE Miao,LI Xiaojing,LIU Zhixiang. The intelligent control of roadheaders yaw velocity is established based on neural network PID control method[J]. Machine Design and Research,2019,35(1):125-127,132. doi: 10.13952/j.cnki.jofmdr.2019.0113 [13] 毛清华,陈磊,闫昱州,等. 煤矿悬臂式掘进机截割头位置精确控制方法[J]. 煤炭学报,2017,42(增刊2):562-567. doi: 10.13225/j.cnki.jccs.2017.1204MAO Qinghua,CHEN Lei,YAN Yuzhou,et al. Precise control method of cutting head position for boom-type roadheader in coal mine[J]. Journal of China Coal Society,2017,42(S2):562-567. doi: 10.13225/j.cnki.jccs.2017.1204 [14] 张旭辉,赵建勋,张超,等. 悬臂式掘进机视觉伺服截割控制系统研究[J]. 煤炭科学技术,2022,50(2):263-270. doi: 10.13199/j.cnki.cst.2019-0628ZHANG Xuhui,ZHAO Jianxun,ZHANG Chao,et al. Study on visual servo control system for cutting of cantilever roadheader[J]. Coal Science and Technology,2022,50(2):263-270. doi: 10.13199/j.cnki.cst.2019-0628 [15] 杨文娟,张旭辉,张超,等. 基于三激光束标靶的煤矿井下长距离视觉定位方法[J]. 煤炭学报,2022,47(2):986-1001.YANG Wenjuan,ZHANG Xuhui,ZHANG Chao,et al. Long distance vision localization method based on triple laser beams target in coal mine[J]. Journal of China Coal Society,2022,47(2):986-1001. [16] WANG Xinlei,TANG Min,DINESH M,et al. Efficient BVH-based collision detection scheme with ordering and restructuring[J]. Computer Graphics Forum,2018,37(2):227-237. doi: 10.1111/cgf.13356 [17] KLOSOWSKI J T,HELD M,MITCHELL J S B,et al. Efficient collision detection using bounding volume hierarchies of k-DOPs[J]. IEEE Transactions on Visualization and Computer Graphics,1998,4(1):21-36. doi: 10.1109/2945.675649 [18] 王威,杨平. 智能PID控制方法的研究现状及应用展望[J]. 自动化仪表,2008,29(10):1-3,7. doi: 10.3969/j.issn.1000-0380.2008.10.001WANG Wei,YANG Ping. Intelligent PID control of the status and the application of prospect[J]. Process Automation Instrumentation,2008,29(10):1-3,7. doi: 10.3969/j.issn.1000-0380.2008.10.001 -





 点击查看大图
点击查看大图
计量
- 文章访问数: 175
- HTML全文浏览量: 29
- PDF下载量: 25
- 被引次数: 0
