

Research on key technology of intelligent fully mechanized caving face construction in Baode Coal Mine
-
摘要: 针对现有智能综放工作面建设的研究成果缺乏某个综放工作面系统化建设实施研究的问题,以国家能源集团神东煤炭集团有限责任公司保德煤矿81309智能综放工作面为研究背景,在液压支架电液控制系统及综采自动化系统配置的基础上,详细介绍了设备升级改造、有限透明开采模型构建、智能放煤工艺决策、煤矸识别方法优化、多模式融合集成控制等关键技术。① 对采煤机电控系统进行国产化升级改造,加装惯导系统,配套光纤复合电缆/5G通信,实现采煤机姿态及控制数据高效稳定传输。采用迈步自移设备列车系统并配套管缆伸缩装置,实现设备列车拉移由1~2人完成。② 对智能规划中心数据源中的地质模型进行迭代修正,经过一系列换算和多源异构数据融合,形成有限透明开采地质模型。③ 针对 81309工作面一刀一放2轮顺序放煤方式,构建了10个智能综放回采阶段并设计了对应的采煤机、综放液压支架、前后刮板输送机的动作和时间,实现了中部跟机自动化采放、三角煤区域自动开采。④ 采用振动煤矸识别与视频煤矸识别相结合的方式,建成智能综放煤矸识别系统。⑤ 以SAM型综采自动化控制系统为枢纽,通过整合液压支架电液控制、视频监控、采煤机电控、三机泵站集控,构建出智能化集中控制系统,初步建成基于透明开采的“采−支−识−放−运”各环节自适应的综放开采工作面。调试结果表明,81309综放工作面中部实现单班自动控制割煤4刀,液压支架实现自动跟机拉架、联动收伸护帮/伸缩梁、自主推溜等功能,智能化集中控制系统可一键启停生产系统,对设备运行数据进行实时监控。Abstract: The current research achievements in the construction of intelligent fully mechanized caving face lack systematic implementation case for a specific fully mechanized caving face. In order to solve this problem, The 81309 intelligent fully mechanized caving face of Baode Coal Mine, CHN Energy Shendong Coal Group Co.,Ltd. is taken as the research background. Based on the configuration of hydraulic support electro-hydraulic control system and fully mechanized mining automation system, the key technologies such as equipment upgrading and transformation, limited transparent mining model building, intelligent coal drawing process decision-making, optimization of coal gangue recognition method, and multi-mode fusion integrated control are introduced in detail. ① The localization upgrading and transformation of the electric control system of the shearer is carried out. The inertial navigation system is installed. The optical fiber composite cable/5G communication is supported to realize efficient and stable transmission of attitude and control data of shearer. The equipment train can be pulled and moved by 1 - 2 persons by adopting step-type self-shift equipment train and pipe and cable expansion device. ② The iterative correction on the geological model in the data source of the intelligent planning center is carried out. The limited transparent mining geological model is formed through a series of conversions and multi-source heterogeneous data fusion. ③ In view of the sequential coal caving mode of "one cut, one caving and two rounds" in the 81309 working face, 10 intelligent fully mechanized caving mining stages and the corresponding actions and time of shearer, fully mechanized caving hydraulic support, front and rear scraper conveyor are constructed. The automatic mining and drawing in the middle and automatic mining in the triangle coal area are realized. ④ The intelligent coal gangue recognition system of fully mechanized caving is built by combining the vibration coal gangue recognition and video coal gangue recognition technology. ⑤ With the SAM-type fully mechanized mining automation control system as the hub, an intelligent centralized control system is constructed by integrating the electro-hydraulic control of hydraulic support, video monitoring, electric control of shearer and centralized control of pump stations of three machines. The intelligent fully mechanized caving face with adaptation in all links of "mining, support, recognition, caving and transportation" based on transparent mining has been initially built. The debugging results show that the middle part of 81309 fully mechanized caving face can realize the automatic control of 4 coal cutters in a single shift. The hydraulic support can realize the functions of the automatic following machine and pulling frame, linkage receiving and extension guard / expansion beam, and automatic pushing and sliding. The intelligent centralized control system can start and stop the production system with one key, and monitor the equipment operation data in real-time.
-
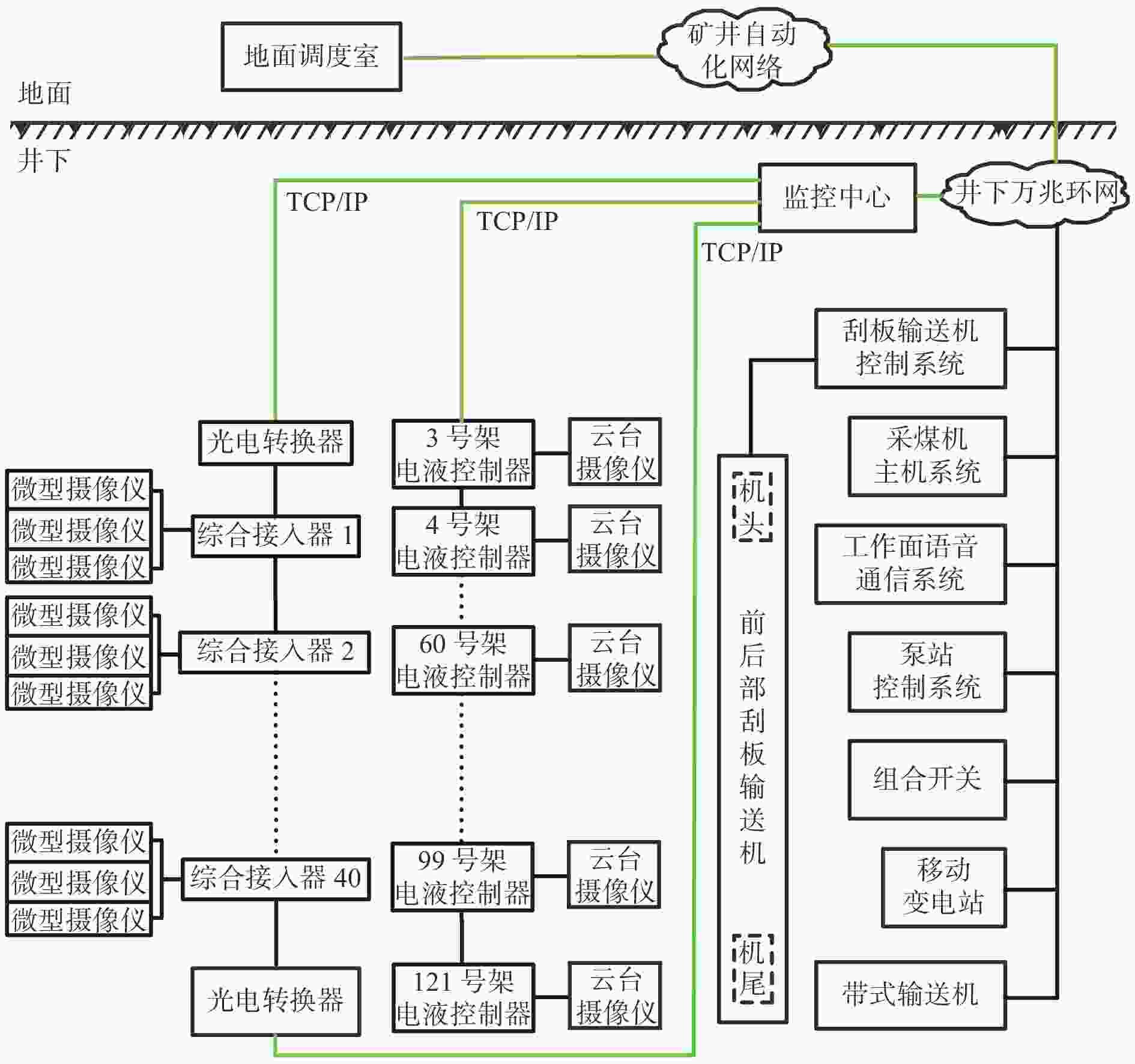
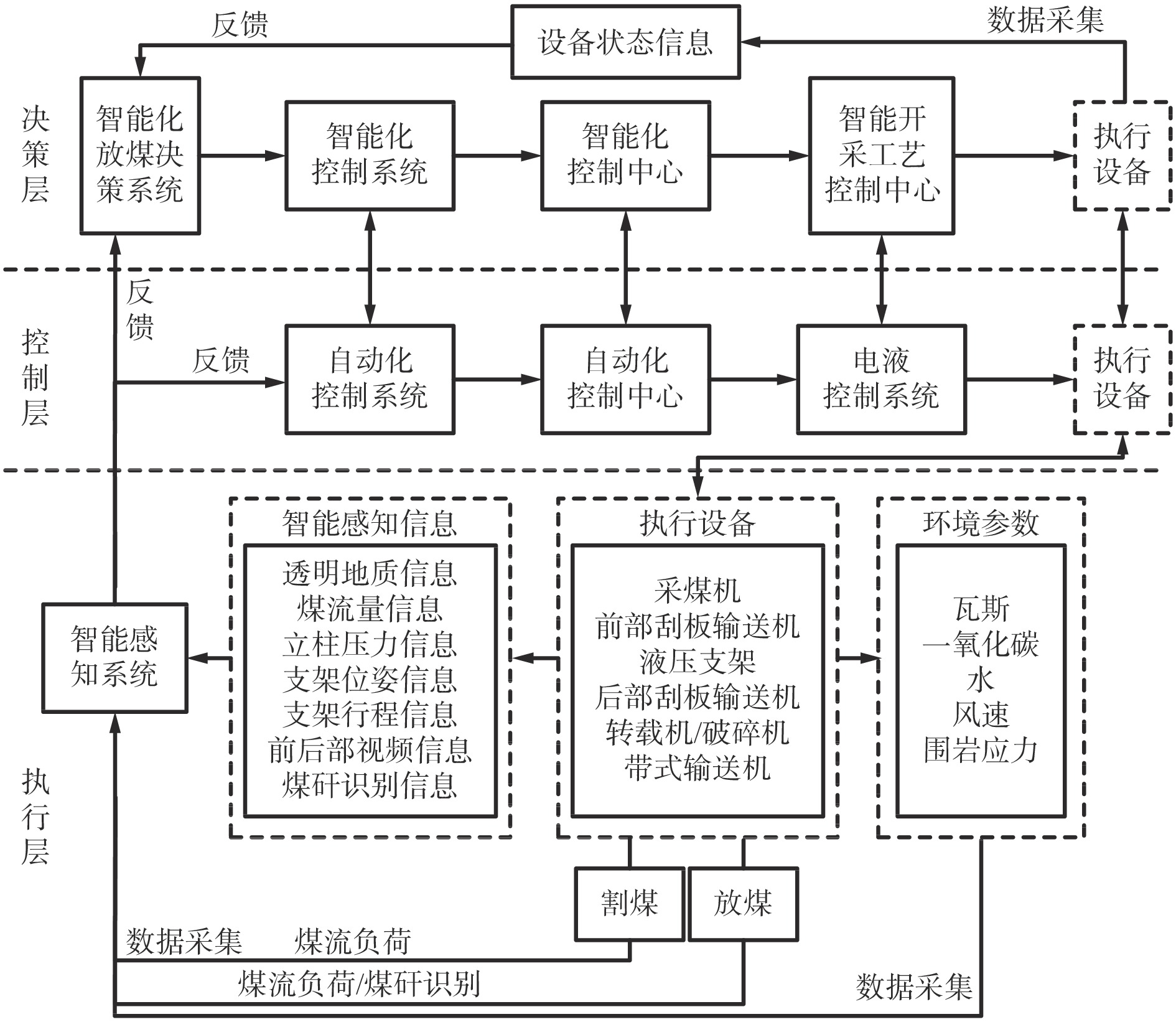
图 1 智能综放控制系统基本配置
Figure 1. Basic configuration of intelligent fully mechanized Caving control system
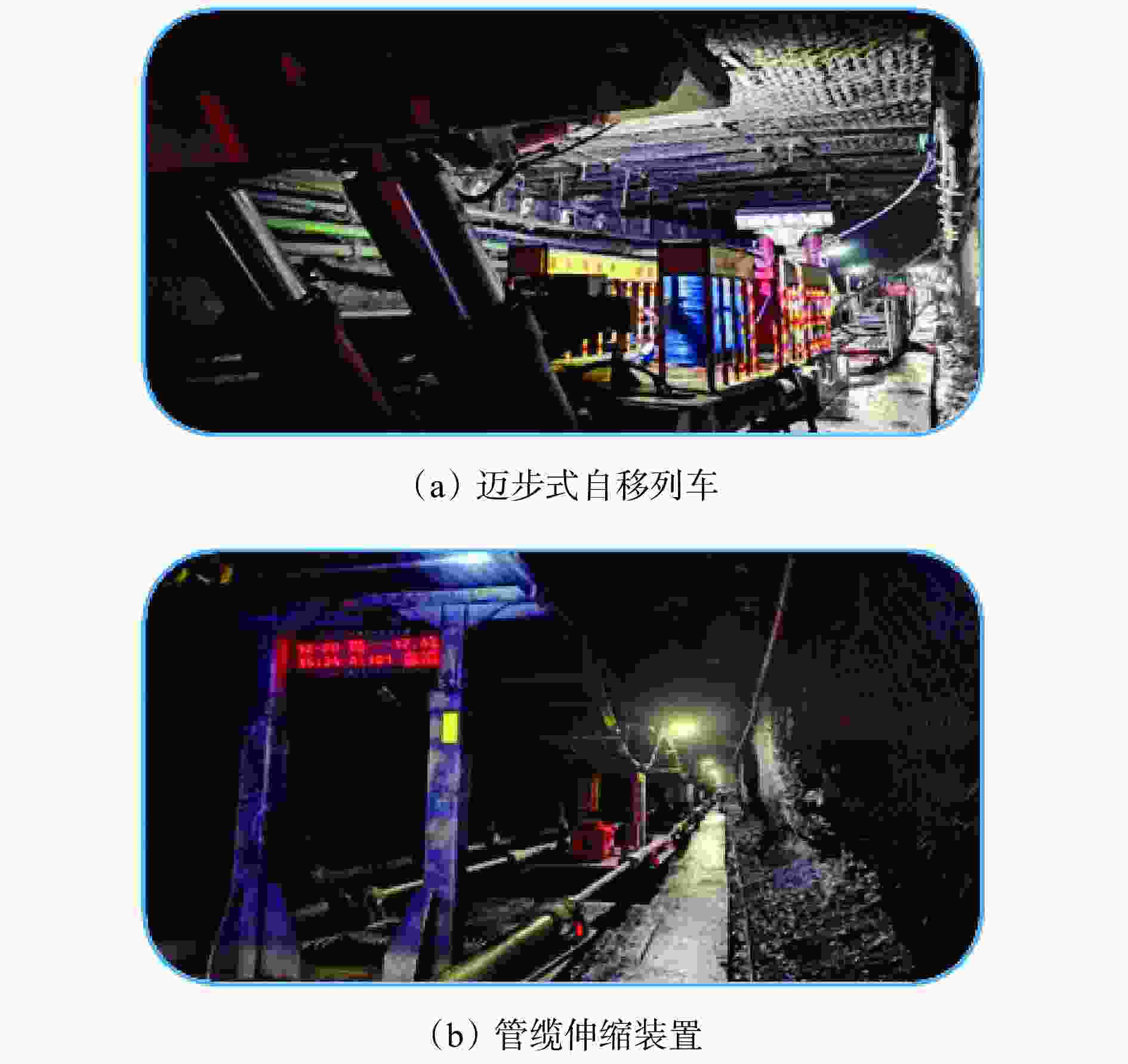
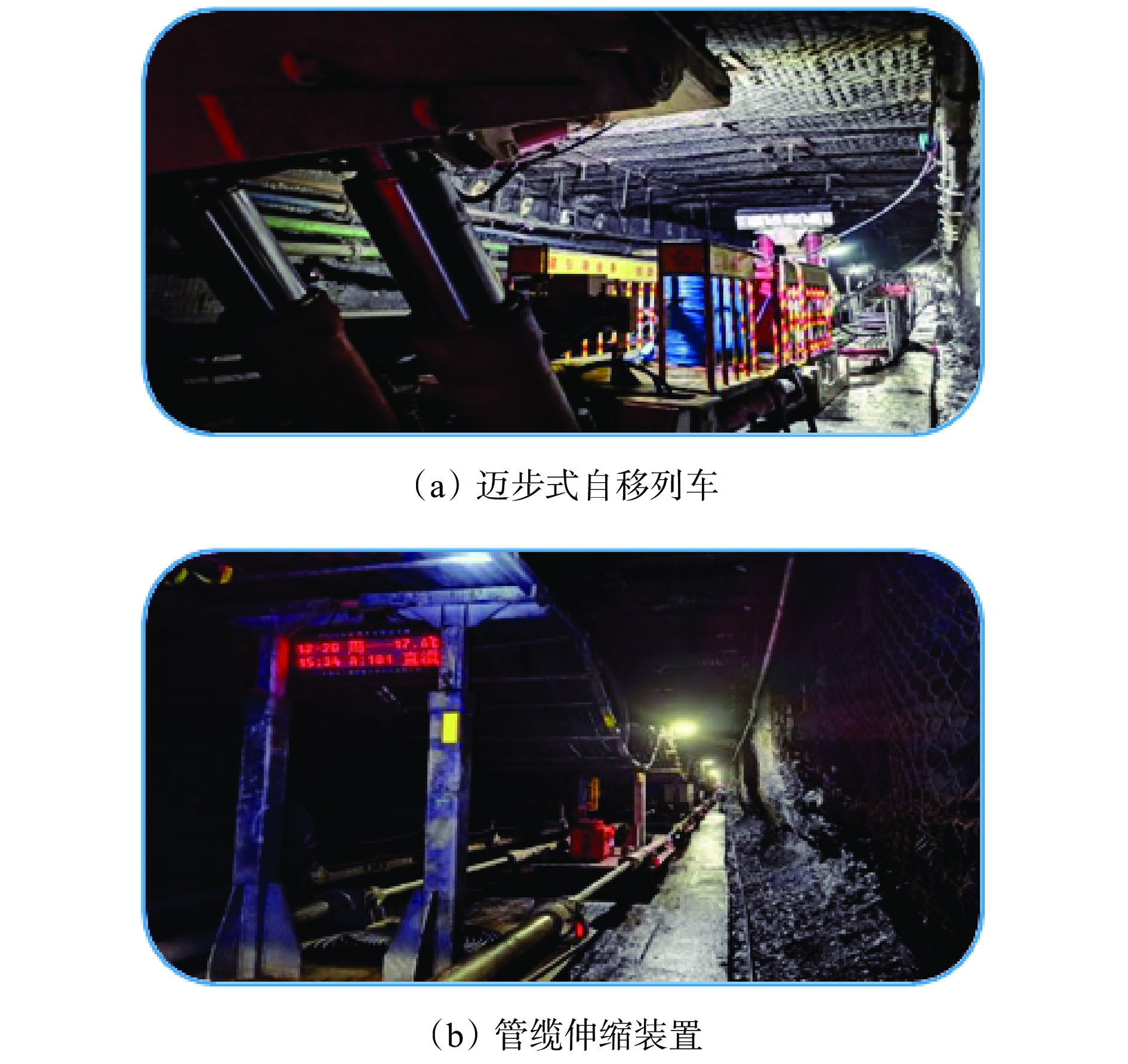
图 3 迈步式自移设备列车及管缆伸缩装置
Figure 3. Step-type self-shift equipment train and pipe and cable expansion device

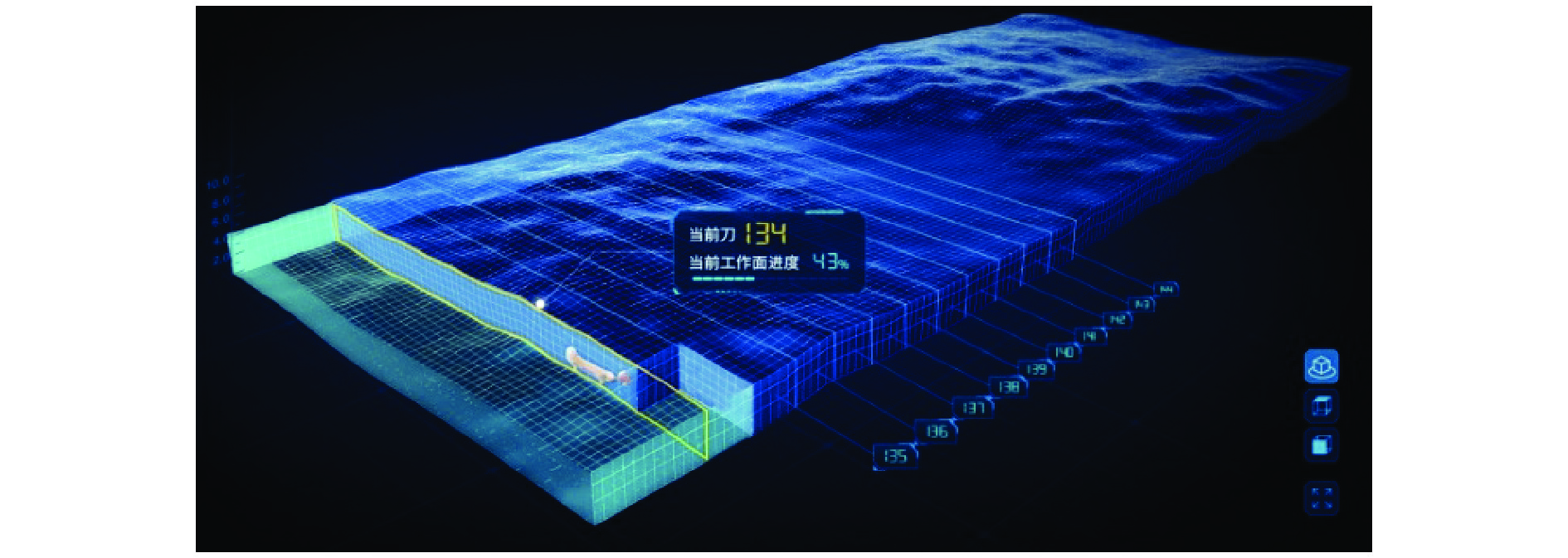
图 4 基于透明地质的综采工作面智能化协同规划开采系统
Figure 4. Intelligent collaborative planning and mining system of fully mechanized mining face based on transparent geology

图 6 加速度传感器时域能量算法三维图
Figure 6. Time domain energy algorithm 3D diagram of acceleration sensor

图 8 智能综放地面分控中心
Figure 8. Intelligent fully mechanized caving ground sub-control center
表 1 智能回采工艺阶段
Table 1. Intelligent coal mining process stage
序号 阶段说明 动作说明 1 阶段1
采煤机中心12号架
停留0 min上行1) 跟机自动移架,从7号架开始,移架距离为6台支架,允许动作为3台支架;
2) 跟机伸伸缩梁−护帮联动(该动作为移架后自动动作),距离为6台支架,允许动作为3台支架;
3) 跟机收伸缩梁−护帮联动,距离为3台支架,允许动作为5台支架;
4) 跟机推溜,从3号架开始,推溜距离为10台支架,允许动作为8台支架(端头3号−6号架推溜结束后进行自动顺序移架);
5) 跟机时放煤,从7号架开始,距离为19台支架,允许动作为2台支架;
6) 跟机拉后溜,从3号架开始,距离为22台支架,允许动作为10台支架(拉后溜必须在放煤之后完成动作)2 阶段2
采煤机中心116号架
停留8 min下行(此时跟机移架到110号架,跟机伸护帮至110号架,跟机推溜至106号架,98号架为满行程,跟机放煤至95号架,拉后溜到86号架)
1) 跟机补充自动移架,111号−117号架补充移架,移架后不伸护帮板;
2) 补充跟机收护帮至110号−105号架,给采煤机扫煤留出空间;
3) 补充推出蛇形段,动作区域为98号−106号架;
4) 补充跟机放煤由87号架顺序向115号架执行(放煤动作执行未完毕,不允许执行补充拉后溜动作);
5) 补充跟机拉后溜,从86号−117号架满行程拉后溜(拉后溜必须在放煤之后完成动作)3 阶段3
采煤机中心112号架
停留41 s下行1) 采煤机割透机尾后,反向下行至 113号架(滚筒在108号架,扫底煤不限次,不扫可直接经过);
2) 采煤机反向下行至蛇形段最大架号,该蛇形段区域执行中部跟机伸护帮动作,从112号架开始,采煤机前滚筒收伸缩梁护帮联动(时间可设置),采煤机后滚筒执行跟机伸伸缩梁护帮联动动作(时间可设置)4 阶段4
采煤机中心92号架
停留4 min上行1) 采煤机运行到蛇形段最大架号92号时,触发98号−121号架满行程推溜;
2) 采煤机反向上行割三角煤,该蛇形段区域执行中部跟机伸护帮动作,从92号架开始,采煤机前滚筒收伸缩梁护帮联动(时间可设置),采煤机后滚筒执行跟机伸伸缩梁护帮联动动作(时间可设置);
3) 满行程推溜后,补充跟机移架从 121号−118号架(移架后进行伸护帮);
4) 补充跟机拉后溜满行程,从118号−121号架5 阶段5
采煤机中心113号架
停留0 min下行采煤机割透三角煤后,反向下行至113号架,扫底煤不限次数 6 阶段6
采煤机中心112号架
停留0 min下行1) 跟机自动移架,从117号架开始,移架距离为6台支架,允许动作为3台支架;
2) 跟机伸伸缩梁−护帮联动(该动作为移架后自动动作),距离为6台支架,允许动作为3台支架;
3) 跟机收伸缩梁−护帮联动,距离为3台支架,允许动作为5台支架;
4) 跟机推溜,从121号架开始,推溜距离为10台支架,允许动作为8台支架(端头121号−118号架推溜结束后进行自动顺序移架);
5) 跟机时放煤,从117号架开始,距离为19台支架,允许动作为2台支架;
6) 跟机拉后溜,从121号架开始,距离为22台支架,允许动作为10台支架(拉后溜必须在放煤之后完成)7 阶段7
采煤机中心7号架
停留8 min上行(此时跟机移架到13号架,跟机伸护帮至13号架,跟机推溜到17号架,25号架为满行程,跟机放煤至28号架,拉后溜到39号架)
1) 跟机补充自动移架,12号−7号补充移架,移架后不伸护帮;
2) 补充跟机收护帮至13号−18号架,给采煤机扫煤留出空间;
3) 补充推出蛇形段,动作区域为15号−25号架;
4) 补充跟机放煤,由27号架顺序向9号架执行(放煤动作执行未完毕,禁止补充拉后溜);
5) 补充跟机拉后溜,从38号−7号架满行程拉后溜(拉后溜必须在放煤之后完成)8 阶段8
采煤机中心12号架
停留41 s上行1) 采煤机割透机头后,反向上行至 11号架(滚筒在7号,扫底煤不限次,不扫可直接经过);
2) 采煤机反向上行至蛇形段最大架号,该蛇形段区域执行中部跟机伸护帮动作,从12号开始,采煤机前滚筒处收伸缩梁−护帮联动(时间可设置),采煤机后滚筒处伸伸缩梁−护帮联动(时间可设置)9 阶段9
采煤机中心32号架
停留4 min下行1) 采煤机运行到蛇形段最大架号32号时,触发25号−3号架满行程推溜;
2) 采煤机反向下行割三角煤,该蛇形段区域执行中部跟机伸护帮动作,从32号架开始,采煤机前滚筒处收伸缩梁-护帮联动(时间可设置),采煤机后滚筒处伸伸缩梁−护帮联动(时间可设置);
3) 满行程推溜后,补充跟机移架从3号−6号架(顺序:3号−6号架,同时移架后进行伸护帮板);
4) 补充跟机拉后溜满行程,从3号−6号架;
5) 拉后溜后,端头组合支架1号−2号架分别执行降(前中后立柱)、拉、升((前中后立柱)动作10 阶段10
采煤机中心11号架
停留0 min上行采煤机割透三角煤后,反向上行至11号架,扫底煤不限次数  下载: 导出CSV
下载: 导出CSV
-
[1] 王国法,庞义辉. 特厚煤层大采高综采综放适应性评价和技术原理[J]. 煤炭学报,2018,43(1):33-42.WANG Guofa,PANG Yihui. Full-mechanized coal mining and caving mining method evaluation and key technology for thick coal seam[J]. Journal of China Coal Society,2018,43(1):33-42. [2] 王国法,庞义辉,马英. 特厚煤层大采高综放自动化开采技术与装备[J]. 煤炭工程,2018,50(1):1-6.WANG Guofa,PANG Yihui,MA Ying. Automated mining technology and equipment for fully-mechanized caving mining with large mining height in extra-thick coal seam[J]. Coal Engineering,2018,50(1):1-6. [3] 王国法. 煤矿智能化最新技术进展与问题探讨[J]. 煤炭科学技术,2022,50(1):1-27.WANG Guofa. New technological progress of coal mine intelligent and its problems[J]. Coal Science and Technology,2022,50(1):1-27. [4] 王勇. 加快推进煤矿智能化建设 提高煤矿本质安全水平[J]. 中国煤炭工业,2020(11):4. doi: 10.3969/j.issn.1673-9612.2020.11.001WANG Yong. Accelerate the construction of intelligent coal mine to improve the essential safety level of coal mine[J]. China Coal Industry,2020(11):4. doi: 10.3969/j.issn.1673-9612.2020.11.001 [5] 王国法,王虹,任怀伟,等. 智慧煤矿2025情景目标和发展路径[J]. 煤炭学报,2018,43(2):295-305.WANG Guofa,WANG Hong,REN Huaiwei,et al. 2025 scenarios and development path of intelligent coal mine[J]. Journal of China Coal Society,2018,43(2):295-305. [6] 王家臣. 我国放顶煤开采的工程实践与理论进展[J]. 煤炭学报,2018,43(1):43-51.WANG Jiachen. Engineering practice and theoretical progress of top-coal caving mining technology in China[J]. Journal of China Coal Society,2018,43(1):43-51. [7] 黄曾华. 综采装备单机智能化向智能协同模式转型的探索研究[J]. 煤炭科学技术,2021,49(4):169-175.HUANG Zenghua. Exploration and research on transformation from intelligent single machine equipment to intelligent synergy in coal mine[J]. Coal Science and Technology,2021,49(4):169-175. [8] 葛世荣. 煤矿智采工作面概念及系统架构研究[J]. 工矿自动化,2020,46(4):1-9.GE Shirong. Research on concept and system architecture of smart mining workface in coal mine[J]. Industry and Mine Automation,2020,46(4):1-9. [9] 王国法,徐亚军,孟祥军,等. 智能化采煤工作面分类、分级评价指标体系[J]. 煤炭学报,2020,45(9):3033-3044.WANG Guofa,XU Yajun,MENG Xiangjun,et al. Specification,classification and grading evaluation index for smart longwall mining face[J]. Journal of China Coal Society,2020,45(9):3033-3044. [10] 王国法,庞义辉,任怀伟. 煤矿智能化开采模式与技术路径[J]. 采矿与岩层控制工程学报,2020,2(1):5-19.WANG Guofa,PANG Yihui,REN Huaiwei. Intelligent coal mining pattern and technological path[J]. Journal of Mining and Strata Control Engineering,2020,2(1):5-19. [11] 于斌,徐刚,黄志增,等. 特厚煤层智能化综放开采理论与关键技术架构[J]. 煤炭学报,2019,44(1):42-53.YU Bin,XU Gang,HUANG Zhizeng,et al. Theory and its key technology framework of intelligentized fully-mechanized caving mining in extremely thick coal seam[J]. Journal of China Coal Society,2019,44(1):42-53. [12] 张守祥,张学亮,刘帅,等. 智能化放顶煤开采的精确放煤控制技术[J]. 煤炭学报,2020,45(6):2008-2020.ZHANG Shouxiang,ZHANG Xueliang,LIU Shuai,et al. Intelligent precise control technology of fully mechanized top coal caving face[J]. Journal of China Coal Society,2020,45(6):2008-2020. [13] 张学亮,刘清,郎瑞峰,等. 厚煤层智能放煤工艺及精准控制关键技术研究[J]. 煤炭工程,2020,52(9):1-6.ZHANG Xueliang,LIU Qing,LANG Ruifeng,et al. Intelligent coal drawing process and the key technologies of precise control for thick coal seam top-coal caving[J]. Coal Engineering,2020,52(9):1-6. [14] 秦文光. 王家岭矿综放工作面智能化协同控制方案设计与实现[J]. 煤炭科学技术,2020,49(增刊1):53-58.QIN Wenguang. Design and complete of intelligent collaborative control scheme for fully-mechanized top coal caving face in Wangjialing Mine[J]. Coal Science and Technology,2020,49(S1):53-58. [15] 韩秀琪,杨秀宇,孙峰,等. 智能综放工作面自动运行与人工干预分析系统[J]. 工矿自动化,2020,46(12):31-37.HAN Xiuqi,YANG Xiuyu,SUN Feng,et al. Automatic operation and manual intervention analysis system for intelligent fully mechanized caving face[J]. Industry and Mine Automation,2020,46(12):31-37. [16] 王家臣,潘卫东,张国英,等. 图像识别智能放煤技术原理与应用[J]. 煤炭学报,2022,47(1):87-101.WANG Jiachen,PAN Weidong,ZHANG Guoying,et al. Principles and applications of image-based recognition of withdraw coal and intelligent control of draw opening in longwall top coal caving face[J]. Journal of China Coal Society,2022,47(1):87-101. [17] 袁源,汪嘉文,朱德昇,等. 顶煤放落过程煤矸声信号特征提取与分类方法[J]. 矿业科学学报,2021,6(6):711-720.YUAN Yuan,WANG Jiawen,ZHU Desheng,et al. Feature extraction and classification method of coal gangue acoustic signal during top coal caving[J]. Journal of Mining Science and Technology,2021,6(6):711-720. [18] 曹贯强,尉瑞,孟祥涛,等. 用于煤矸识别的振动传感器设计[J]. 工矿自动化,2021,47(1):118-122.CAO Guanqiang,YU Rui,MENG Xiangtao,et al. Design of vibration sensor for coal gangue identification[J]. Industry and Mine Automation,2021,47(1):118-122. [19] 张守祥,张艳丽,王永强,等. 综采工作面煤矸频谱特征[J]. 煤炭学报,2007,32(9):971-974.ZHANG Shouxiang,ZHANG Yanli,WANG Yongqiang,et al. Caved coal and rock spectrum on long wall face[J]. Journal of China Coal Society,2007,32(9):971-974. [20] 吴婕萍,李国辉. 煤岩界面自动识别技术发展现状及其趋势[J]. 工矿自动化,2015,41(12):44-49.WU Jieping,LI Guohui. Development status and tendency of automatic identification technologies of coal-rock interface[J]. Industry and Mine Automation,2015,41(12):44-49. [21] 魏文艳. 综采工作面放顶煤自动控制系统[J]. 工矿自动化,2015,41(7):10-13.WEI Wenyan. Automatic control system for top coal caving on fully mechanized mining face[J]. Industry and Mine Automation,2015,41(7):10-13. -




 点击查看大图
点击查看大图

计量
- 文章访问数: 182
- HTML全文浏览量: 30
- PDF下载量: 29
- 被引次数: 0
